- Электрический привод

Содержание
- 2. Понятие электрического привода Электрический привод (сокращённо — электропривод) — это электромеханическая система для приведения в движение
- 3. ИСТОРИЯ РАЗВИТИЯ ЭЛЕКТРОПРИВОДА И ЕГО РОЛЬ В СОВРЕМЕННЫХ ТЕХНОЛОГИЯХ Историю ЭП обычно начинают отсчитывать с разработки
- 4. Толчком к развитию ЭП явилась разработка в 1889г. М.О.Доливо-Добровольским системы трехфазного тока и появление трехфазного асинхронного
- 5. Функциональная схема
- 6. Функциональные элементы: Регуляторы (Р) предназначен для управления процессами, протекающими в электроприводе. Электрический преобразователь (ЭП) предназначен для
- 7. Враща́тельное движе́ние — вид движения. При вращательном движении абсолютно твёрдого тела его точки описывают окружности, расположенные
- 8. Система управления — систематизированный набор средств влияния на подконтрольный объект для достижения определённых целей данным объектом.
- 9. Статические характеристики Под статическими характеристиками чаще всего подразумеваются электромеханическая и механическая характеристика Механическая характеристика — это
- 10. В ЭП используются электродвигатели вращательного и поступательного движения постоянного и переменного тока непрерывного и дискретного перемещений;
- 12. Скачать презентацию
Понятие электрического привода
Электрический привод (сокращённо — электропривод) — это электромеханическая система
Понятие электрического привода
Электрический привод (сокращённо — электропривод) — это электромеханическая система
ИСТОРИЯ РАЗВИТИЯ ЭЛЕКТРОПРИВОДА И ЕГО РОЛЬ В СОВРЕМЕННЫХ ТЕХНОЛОГИЯХ
Историю ЭП обычно
ИСТОРИЯ РАЗВИТИЯ ЭЛЕКТРОПРИВОДА И ЕГО РОЛЬ В СОВРЕМЕННЫХ ТЕХНОЛОГИЯХ
Историю ЭП обычно
Толчком к развитию ЭП явилась разработка в 1889г. М.О.Доливо-Добровольским системы трехфазного
Толчком к развитию ЭП явилась разработка в 1889г. М.О.Доливо-Добровольским системы трехфазного

Функциональная схема
Функциональная схема
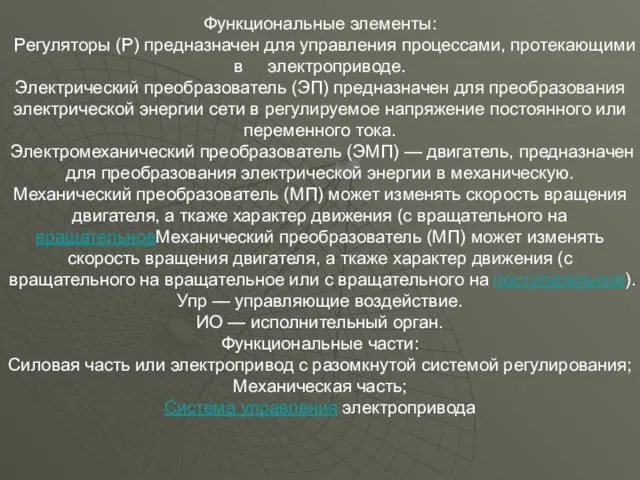
Функциональные элементы:
Регуляторы (Р) предназначен для управления процессами, протекающими в электроприводе.
Функциональные элементы:
Регуляторы (Р) предназначен для управления процессами, протекающими в электроприводе.

Враща́тельное движе́ние — вид движения. При вращательном движении абсолютно твёрдого тела его
Враща́тельное движе́ние — вид движения. При вращательном движении абсолютно твёрдого тела его
Система управления — систематизированный набор средств влияния на подконтрольный объект для достижения
Система управления — систематизированный набор средств влияния на подконтрольный объект для достижения
Статические характеристики
Под статическими характеристиками чаще всего подразумеваются электромеханическая и механическая
Статические характеристики
Под статическими характеристиками чаще всего подразумеваются электромеханическая и механическая
В ЭП используются электродвигатели вращательного и поступательного движения постоянного и переменного
В ЭП используются электродвигатели вращательного и поступательного движения постоянного и переменного
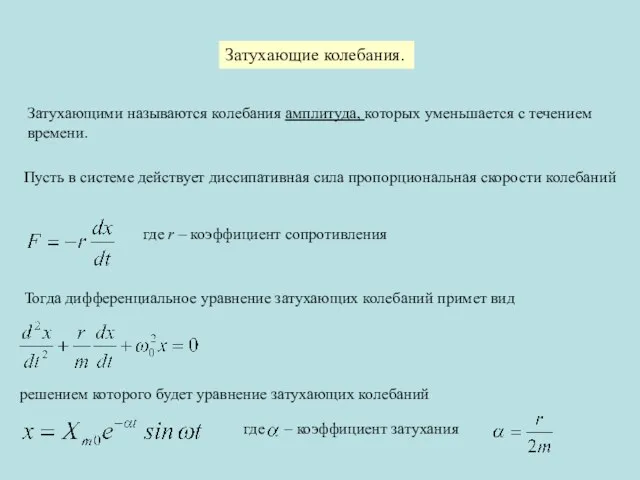 Затухающие и вынужденные колебания
Затухающие и вынужденные колебания Деление ядер урана. Цепная реакция
Деление ядер урана. Цепная реакция Электромагнитная картина мира
Электромагнитная картина мира Электротехника и электроника
Электротехника и электроника Урок №2 Виды нагрузок в системе электропривода
Урок №2 Виды нагрузок в системе электропривода Адиабатный процесс
Адиабатный процесс Виды контроля коррозии
Виды контроля коррозии Презентация для интегрированного урока Физико-математический турнир для 8-х классов
Презентация для интегрированного урока Физико-математический турнир для 8-х классов Виды инжекторных систем. Motronic
Виды инжекторных систем. Motronic История ядерного реактора
История ядерного реактора Свойства твердых тел
Свойства твердых тел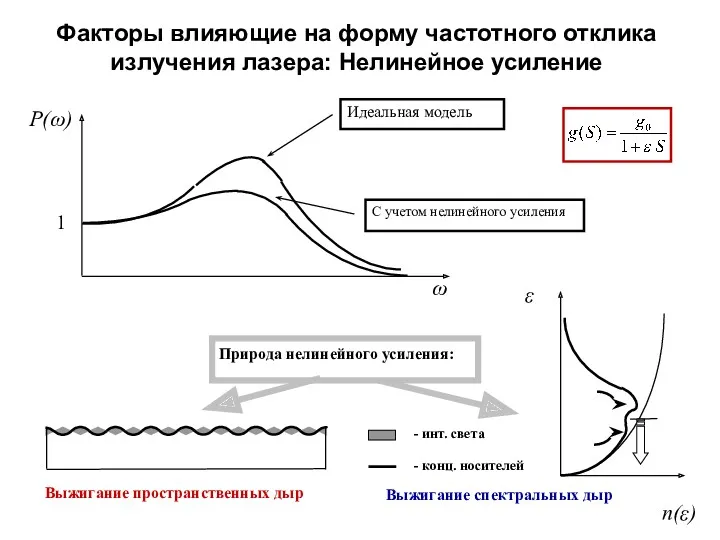 Факторы влияющие на форму частотного отклика излучения лазера: Нелинейное усиление
Факторы влияющие на форму частотного отклика излучения лазера: Нелинейное усиление Механическая работа
Механическая работа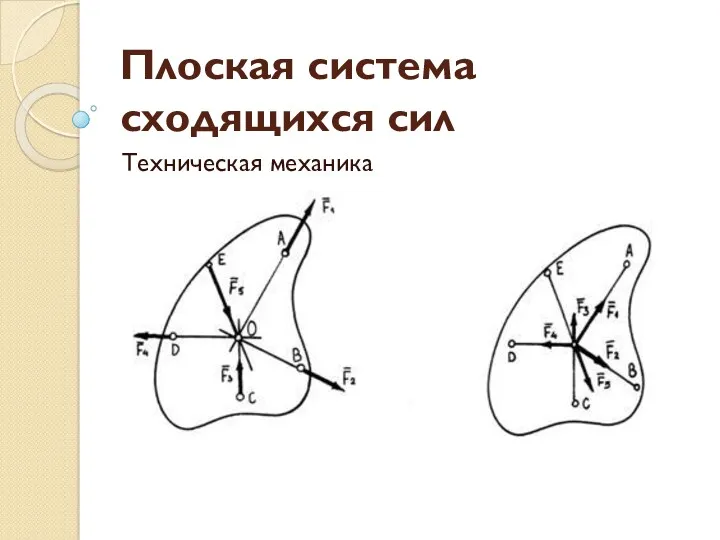 Плоская система сходящихся сил. Техническая механика
Плоская система сходящихся сил. Техническая механика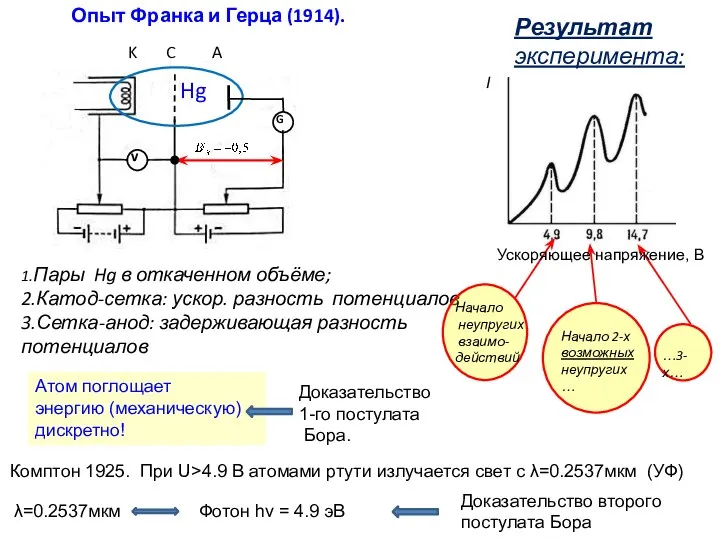 Опыт Франка и Герца (1914)
Опыт Франка и Герца (1914)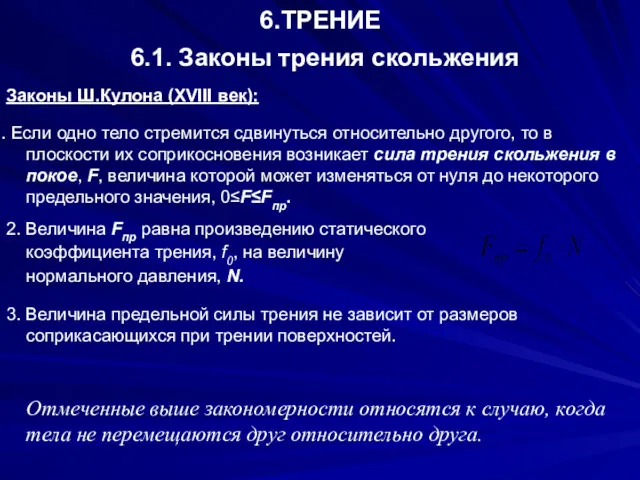 Законы трения скольжения
Законы трения скольжения Озоновый слой атмосферы. Ультрафиолетовое излучение
Озоновый слой атмосферы. Ультрафиолетовое излучение Техническое обслуживание электромеханических исполнительных механизмов
Техническое обслуживание электромеханических исполнительных механизмов ГАЗель Next c двигателем Monoturbo VW EA189
ГАЗель Next c двигателем Monoturbo VW EA189 Спектроскопия комбинационного рассеяния (Рамановская спектроскопия). Лекция_1
Спектроскопия комбинационного рассеяния (Рамановская спектроскопия). Лекция_1 Потенциал. Работа электростатического поля
Потенциал. Работа электростатического поля Игра – путешествие по теме Движение и взаимодействие тел
Игра – путешествие по теме Движение и взаимодействие тел Фотоэффект құбылысын түсіндіру. Эйнштейн формуласы. Фотоэффекет құбылысын техникада қолдану
Фотоэффект құбылысын түсіндіру. Эйнштейн формуласы. Фотоэффекет құбылысын техникада қолдану Свободные и вынужденные механические колебания
Свободные и вынужденные механические колебания Шкала элетромагнитных излучений
Шкала элетромагнитных излучений Elementary interactions: Van der Waals & H-bonds
Elementary interactions: Van der Waals & H-bonds Моделирование задач по физике с использованием метода графических образов
Моделирование задач по физике с использованием метода графических образов Процессы теплопереноса
Процессы теплопереноса