Детали мехатронных модулей, роботов. Кинематическая точность механизмов. Податливость преобразователей движения презентация
- Детали мехатронных модулей, роботов. Кинематическая точность механизмов. Податливость преобразователей движения

Содержание
- 2. КИНЕМАТИЧЕСКАЯ ТОЧНОСТЬ
- 3. Погрешность системы управления и двигателя Погрешность системы управления и двигателя, приведенная к выходному звену преобразователя движения,
- 4. Кинематическая погрешность и мертвый ход преобразователей движения
- 5. Минимальное значение кинематической погрешности, мкм: Максимальное значение кинематической погрешности, мкм: А - коэффициент, учитывающий степень точности
- 6. Мертвый ход цилиндрической зубчатой передачи При расчете по методу максимума-минимума значение мертвого хода Jtmin цилиндрической зубчатой
- 7. Коническая зубчатая передача Максимальное значение мертвого хода, мкм: ESs1 и ESs2 - наименьшее отклонение, мкм, средней
- 8. Кинематическая погрешность и мертвый ход реечной зубчатой передачи Минимальное и максимальное значения кинематической погрешности и мертвого
- 9. Кинематическая погрешность цилиндрической червячной передачи Минимальное значение кинематической погрешности червячной передачи при расчете по методу максимума-минимума,
- 10. При расчете по методу максимума- минимума минимальное значение мертвого хода червячной передачи, мкм: Максимальное значение мертвого
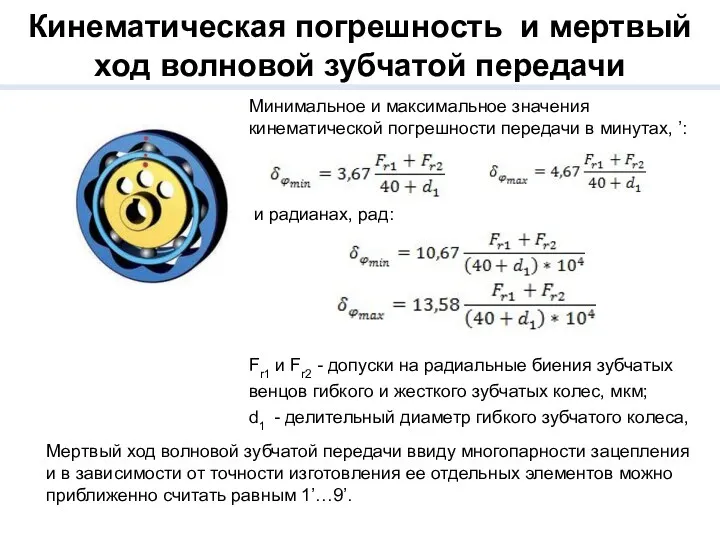
- 11. Кинематическая погрешность и мертвый ход волновой зубчатой передачи Минимальное и максимальное значения кинематической погрешности передачи в
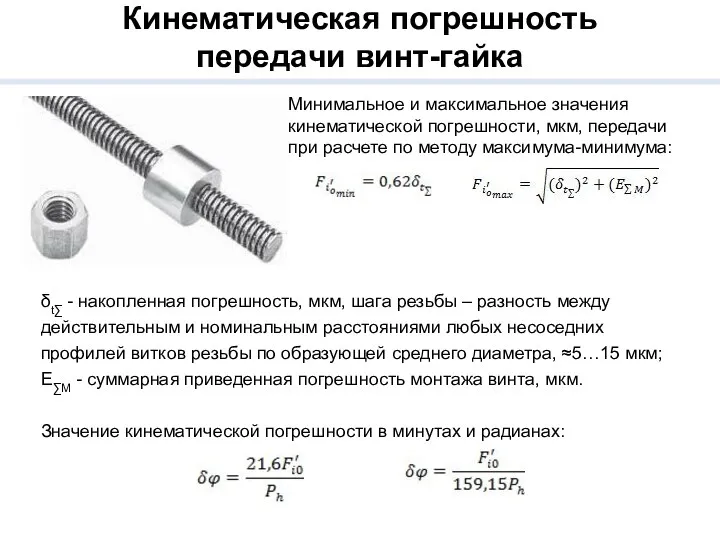
- 12. Кинематическая погрешность передачи винт-гайка Минимальное и максимальное значения кинематической погрешности, мкм, передачи при расчете по методу
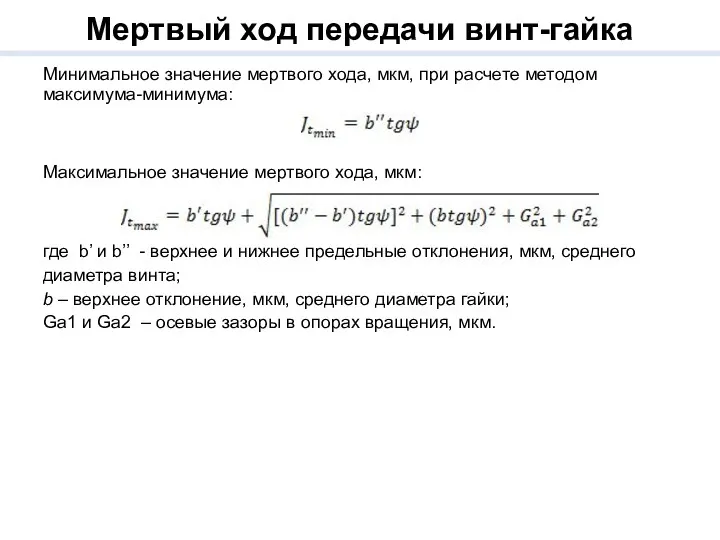
- 13. Мертвый ход передачи винт-гайка Минимальное значение мертвого хода, мкм, при расчете методом максимума-минимума: Максимальное значение мертвого
- 14. Вероятностное значение кинематической погрешности, мкм: Кр – вероятностный коэффициент фазовой компенсации. Значение кинематической погрешности в минутах,
- 15. Мертвый ход шарико-винтовой передачи Максимальное и минимальное значения мертвого хода, мкм, с учетом упругих деформаций соединения
- 16. Суммарная кинематическая погрешность многоступенчатого преобразователя движения при расчете по методу максимума-минимума равна: δi – кинематическая погрешность
- 17. Мертвый ход многоступенчатых преобразователей движения Суммарный мертвый ход многоступенчатого преобразователя движения при расчете по методу максимума-минимума
- 18. Погрешность, вызванная податливостью преобразователя движения М – двигатель; ПД – преобразователь движения Погрешность положения выходного звена
- 19. Податливость
- 20. Податливость элементов ПД Податливость резьбового соединения, мм/Н: Податливость соединения винт-гайка качения, мм/Н:
- 21. Приведенная податливость ПД а, б – параллельное соединение упругих элементов; в – последовательное соединение упругих элементов
- 22. Приведенная податливость ПД Параллельное соединение упругих элементов Приведенная податливость: Обратная величина податливости представляет собой жесткость: Последовательное
- 24. Скачать презентацию
КИНЕМАТИЧЕСКАЯ ТОЧНОСТЬ
КИНЕМАТИЧЕСКАЯ ТОЧНОСТЬ
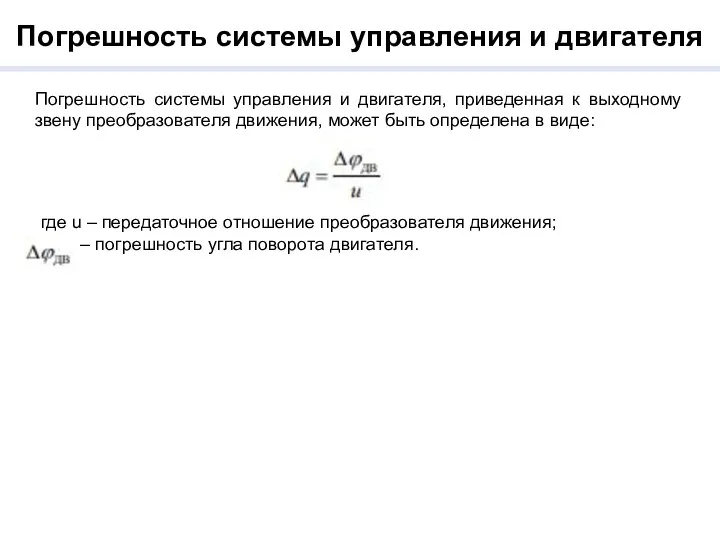
Погрешность системы управления и двигателя
Погрешность системы управления и двигателя, приведенная к
Погрешность системы управления и двигателя
Погрешность системы управления и двигателя, приведенная к
Кинематическая погрешность
и мертвый ход
преобразователей движения
Кинематическая погрешность
и мертвый ход
преобразователей движения
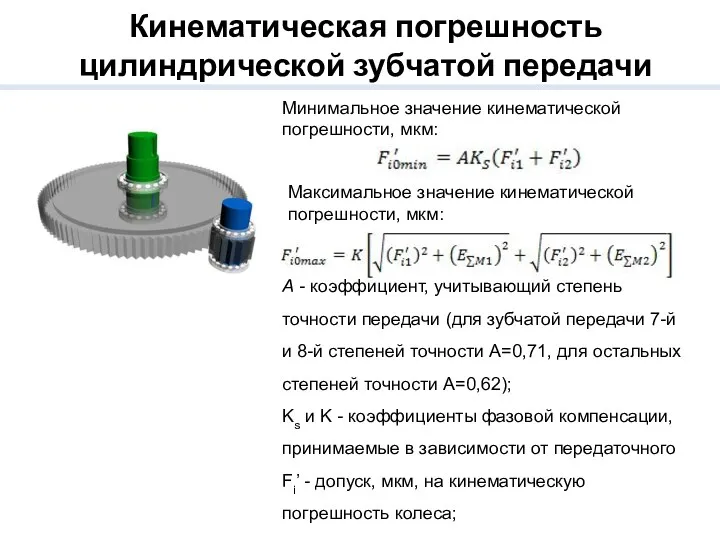
Минимальное значение кинематической погрешности, мкм:
Максимальное значение кинематической погрешности, мкм:
А - коэффициент,
Минимальное значение кинематической погрешности, мкм:
Максимальное значение кинематической погрешности, мкм:
А - коэффициент,
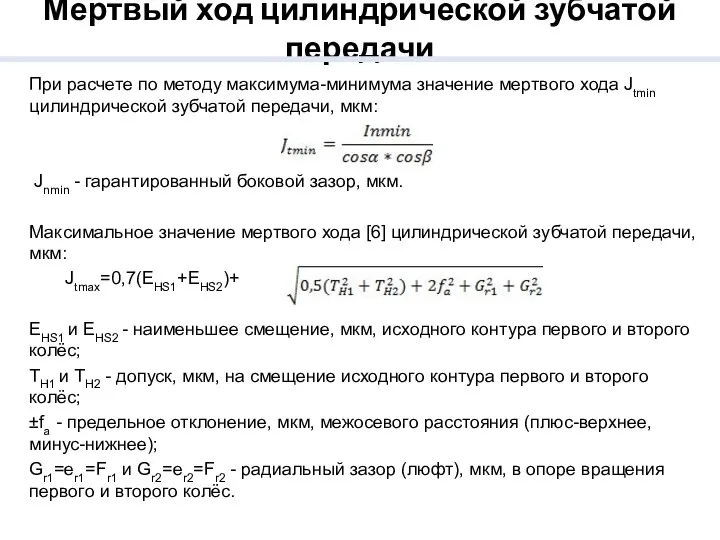
Мертвый ход цилиндрической зубчатой передачи
При расчете по методу максимума-минимума значение мертвого
Мертвый ход цилиндрической зубчатой передачи
При расчете по методу максимума-минимума значение мертвого
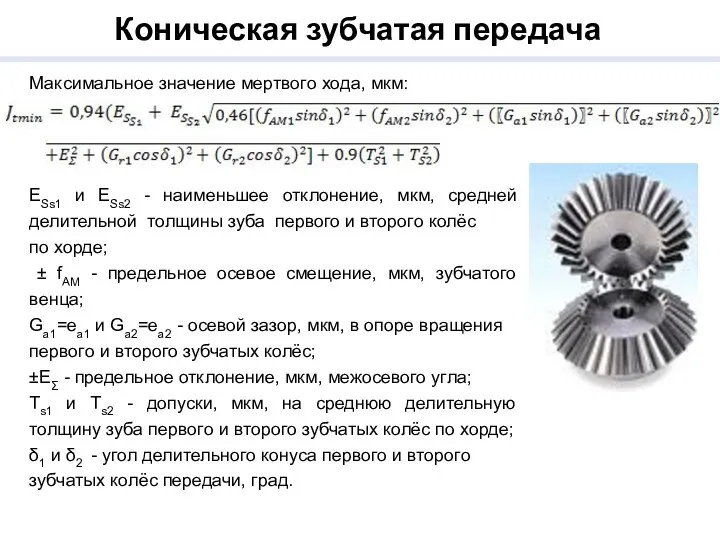
Коническая зубчатая передача
Максимальное значение мертвого хода, мкм:
ESs1 и ESs2 - наименьшее
Коническая зубчатая передача
Максимальное значение мертвого хода, мкм:
ESs1 и ESs2 - наименьшее
Кинематическая погрешность и мертвый ход реечной зубчатой передачи
Минимальное и максимальное значения
Кинематическая погрешность и мертвый ход реечной зубчатой передачи
Минимальное и максимальное значения
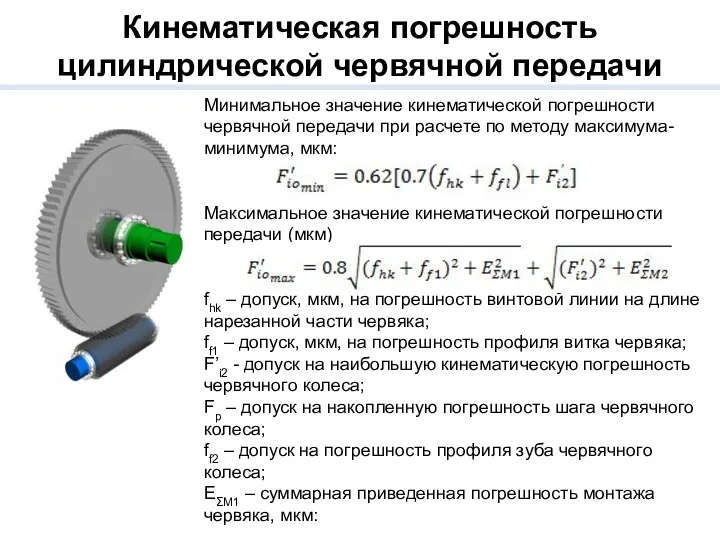
Кинематическая погрешность
цилиндрической червячной передачи
Минимальное значение кинематической погрешности червячной передачи при
Кинематическая погрешность
цилиндрической червячной передачи
Минимальное значение кинематической погрешности червячной передачи при
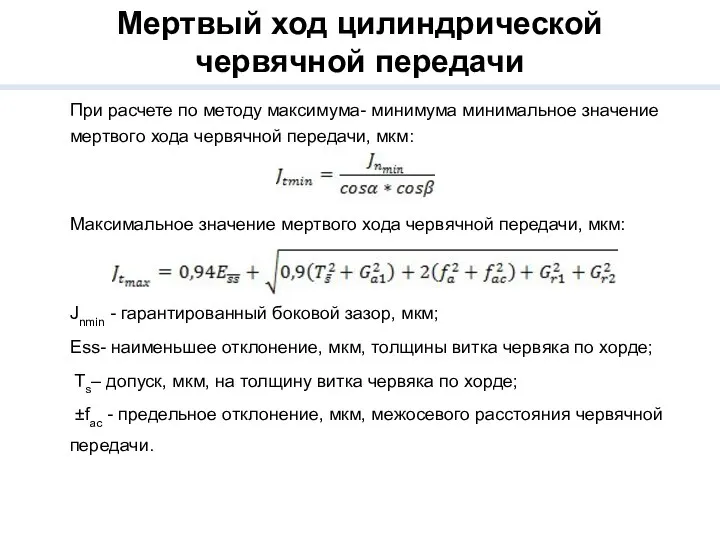
При расчете по методу максимума- минимума минимальное значение мертвого хода червячной
При расчете по методу максимума- минимума минимальное значение мертвого хода червячной
Кинематическая погрешность и мертвый ход волновой зубчатой передачи
Минимальное и максимальное значения
Кинематическая погрешность и мертвый ход волновой зубчатой передачи
Минимальное и максимальное значения
Кинематическая погрешность
передачи винт-гайка
Минимальное и максимальное значения кинематической погрешности, мкм, передачи
Кинематическая погрешность
передачи винт-гайка
Минимальное и максимальное значения кинематической погрешности, мкм, передачи
Мертвый ход передачи винт-гайка
Минимальное значение мертвого хода, мкм, при расчете методом
Мертвый ход передачи винт-гайка
Минимальное значение мертвого хода, мкм, при расчете методом
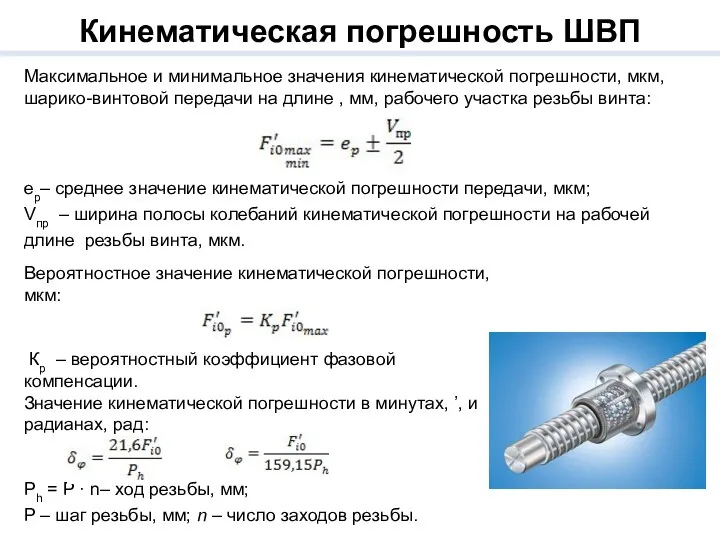
Вероятностное значение кинематической погрешности, мкм:
Кр – вероятностный коэффициент фазовой компенсации.
Значение кинематической
Вероятностное значение кинематической погрешности, мкм:
Кр – вероятностный коэффициент фазовой компенсации.
Значение кинематической
Мертвый ход шарико-винтовой передачи
Максимальное и минимальное значения мертвого хода, мкм, с
Мертвый ход шарико-винтовой передачи
Максимальное и минимальное значения мертвого хода, мкм, с
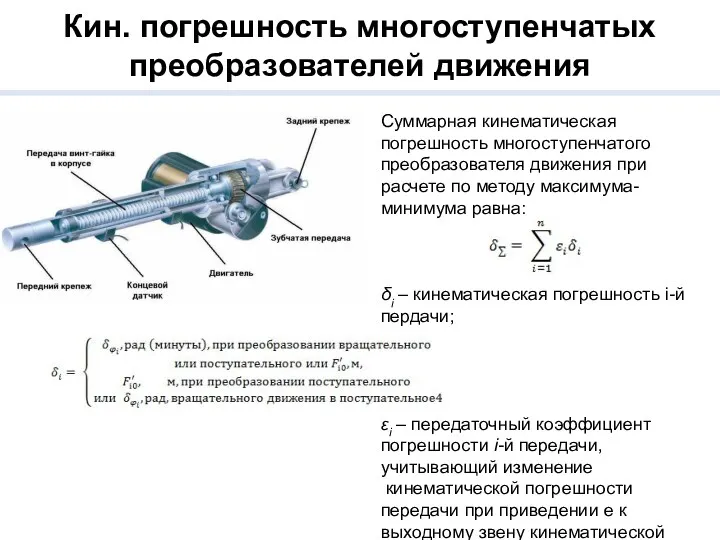
Суммарная кинематическая погрешность многоступенчатого преобразователя движения при расчете по методу максимума-минимума
Суммарная кинематическая погрешность многоступенчатого преобразователя движения при расчете по методу максимума-минимума
Мертвый ход многоступенчатых преобразователей движения
Суммарный мертвый ход многоступенчатого преобразователя движения при
Мертвый ход многоступенчатых преобразователей движения
Суммарный мертвый ход многоступенчатого преобразователя движения при
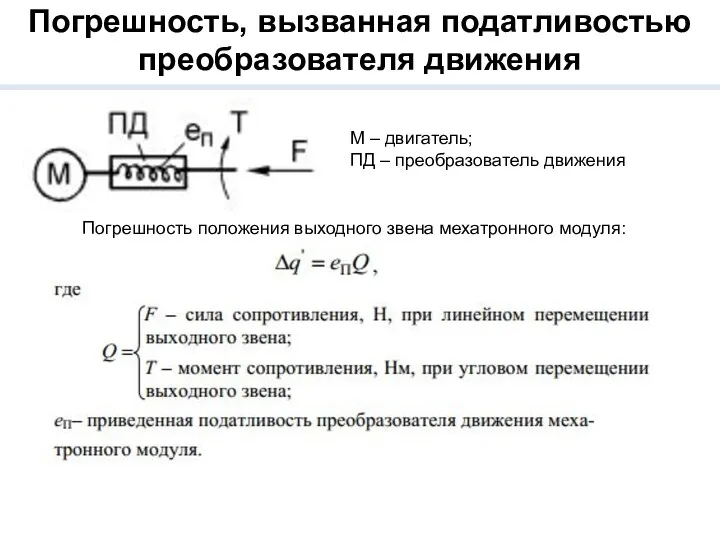
Погрешность, вызванная податливостью
преобразователя движения
М – двигатель;
ПД – преобразователь движения
Погрешность положения
Погрешность, вызванная податливостью
преобразователя движения
М – двигатель;
ПД – преобразователь движения
Погрешность положения
Податливость
Податливость
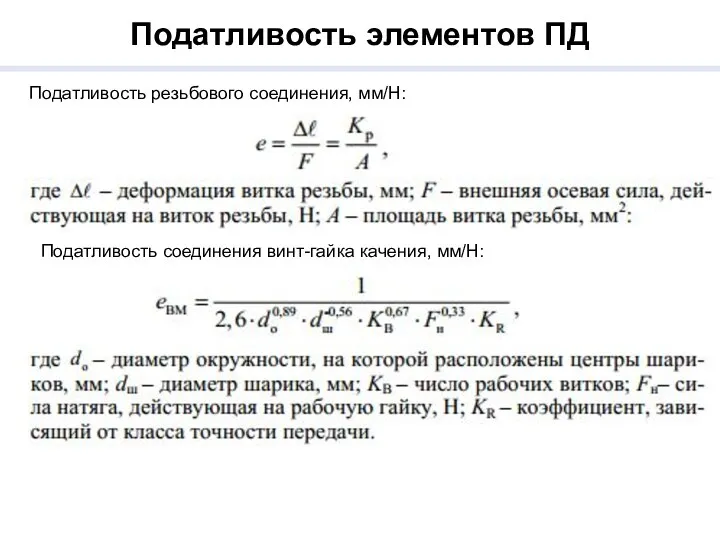
Податливость элементов ПД
Податливость резьбового соединения, мм/Н:
Податливость соединения винт-гайка качения, мм/Н:
Податливость элементов ПД
Податливость резьбового соединения, мм/Н:
Податливость соединения винт-гайка качения, мм/Н:
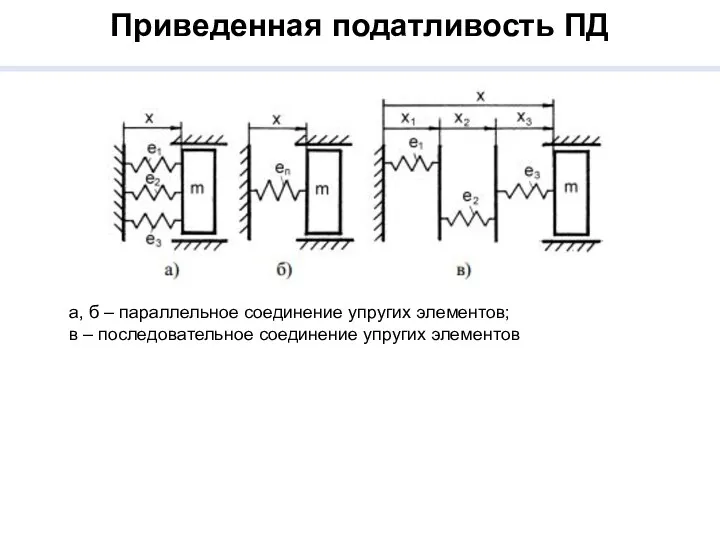
Приведенная податливость ПД
а, б – параллельное соединение упругих элементов;
в – последовательное
Приведенная податливость ПД
а, б – параллельное соединение упругих элементов;
в – последовательное
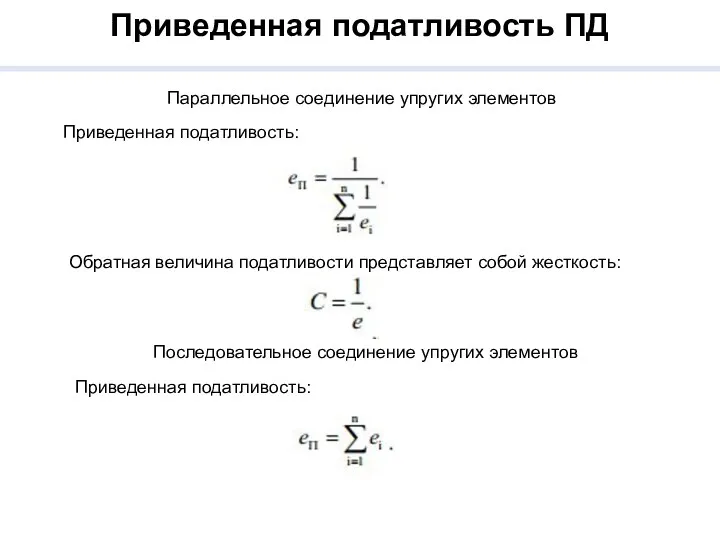
Приведенная податливость ПД
Параллельное соединение упругих элементов
Приведенная податливость:
Обратная величина податливости представляет собой
Приведенная податливость ПД
Параллельное соединение упругих элементов
Приведенная податливость:
Обратная величина податливости представляет собой
 Физика элементарных частиц
Физика элементарных частиц Устройство и принцип действия асинхронной машины. (Лекция 2)
Устройство и принцип действия асинхронной машины. (Лекция 2) Техническое обслуживание и текущий ремонт щеточно-коллекторного узла электрических машин
Техническое обслуживание и текущий ремонт щеточно-коллекторного узла электрических машин Своя игра. Механика
Своя игра. Механика Применение аккумуляторов
Применение аккумуляторов Mechanical vibrations
Mechanical vibrations Потенциальная энергия
Потенциальная энергия Решение задач по теме Законы Ньютона
Решение задач по теме Законы Ньютона Презентация Ядерный реактор
Презентация Ядерный реактор Организация зоны технического обслуживания и ремонта АТП ИП Дедов по восстановлению коленчатого вала автомобилей ЗИЛ 130
Организация зоны технического обслуживания и ремонта АТП ИП Дедов по восстановлению коленчатого вала автомобилей ЗИЛ 130 Неделя физики
Неделя физики Спектроскопические методы исследования пищевых продуктов
Спектроскопические методы исследования пищевых продуктов Надпровідність. Перспективи та застосування. Надпровідники. Лампа, діод, транзистор. Електричний струм у металах
Надпровідність. Перспективи та застосування. Надпровідники. Лампа, діод, транзистор. Електричний струм у металах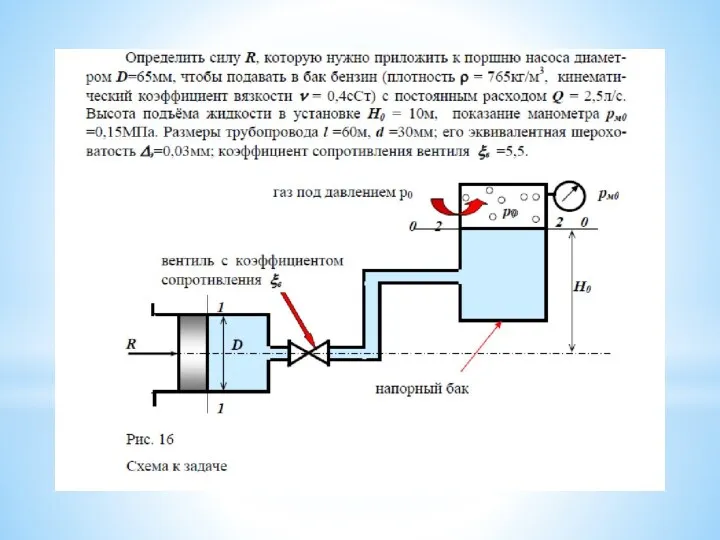 Сила R
Сила R Устройство двигателей
Устройство двигателей Электростатика. Основные понятия
Электростатика. Основные понятия Презентация к уроку на тему:Фотоэффект
Презентация к уроку на тему:Фотоэффект Структура изображения
Структура изображения Топ 10 самых дорогих автомобилей
Топ 10 самых дорогих автомобилей Основы молекулярной физики и термодинамики
Основы молекулярной физики и термодинамики Электрический ток в газах
Электрический ток в газах Магнетизм. Магнетики
Магнетизм. Магнетики Основные понятия и определения надёжности
Основные понятия и определения надёжности Программа курса физики: электричество и магнетизм
Программа курса физики: электричество и магнетизм Мир звуков 9 класс физика
Мир звуков 9 класс физика Организация внеурочной деятельности по предмету через интеграцию возможностей программы RaidCall и АИС Сетевой край. Образование.
Организация внеурочной деятельности по предмету через интеграцию возможностей программы RaidCall и АИС Сетевой край. Образование.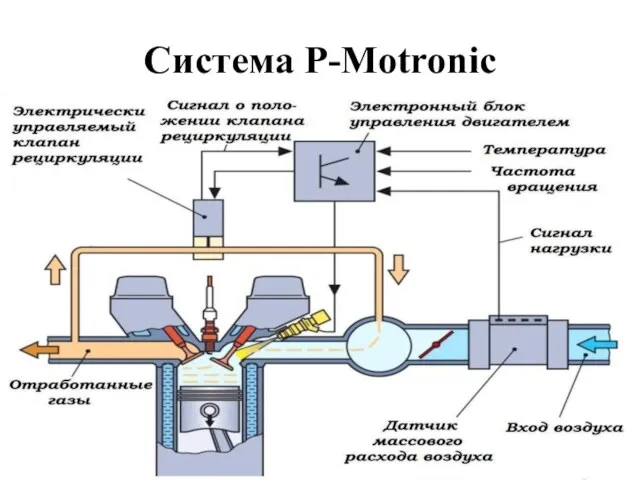 Система P-Motronic
Система P-Motronic Майлау жүйесі
Майлау жүйесі