Электронное управление трансмиссией автомобиля. Система активного распределения крутящего момента. Урок 190 презентация
- Электронное управление трансмиссией автомобиля. Система активного распределения крутящего момента. Урок 190

Содержание
- 2. Система активного распределения крутящего момента ATTS (Active Torque Transfer System) служит для улучшения управляемости автомобиля
- 3. При повороте автомобиля на колеса автомобиля действуют две главные силы – тяговая, ускоряющая автомобиль и боковая,
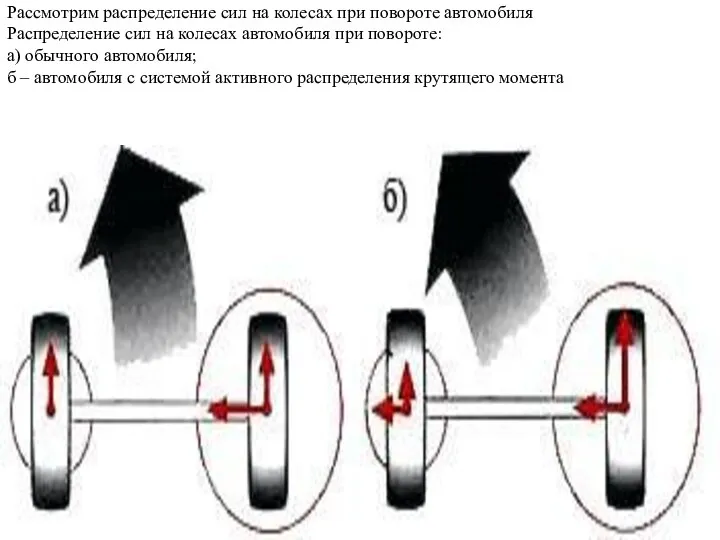
- 4. Рассмотрим распределение сил на колесах при повороте автомобиля Распределение сил на колесах автомобиля при повороте: а)
- 5. При повороте из-за действия центробежной силы внутреннее колесо оказывается разгруженным, то есть оно находится в худших
- 6. Система ATTS перераспределяет крутящий момент между ведущими колесами, убирая излишек тяговой силы с внутреннего колеса и
- 7. Увеличение крутящего момента на наружном колесе позволяет создать дополнительный момент, который стремится «затащить» автомобиль в поворот
- 8. Задача перераспределения крутящего момента не только между левым и правым колесами, но и задней и передней
- 9. Информация от всех датчиков поступает в ЭБУ, рассчитывает оптимальное распределение крутящего момента по колесам. Далее ЭБУ
- 10. В обычных условиях до 70% крутящего момента передается на передние колеса. При больших ускорениях до 70%
- 11. Существуют различия в приводе дисков сцеплений приводов колес. Компания «Мицубиси» в своих конструкциях применяет электрогидравлический привод,
- 12. В дифференциале автомобилей «Хонда» применяются электромагнитные многодисковые сцепления 4. Каждое сцепление индивидуально передает крутящий момент к
- 13. Модули сцепления дополнены собственными планетарными передачами 2. Вместе с дифференциалом работает ускорительный модуль с гидравлическим приводом
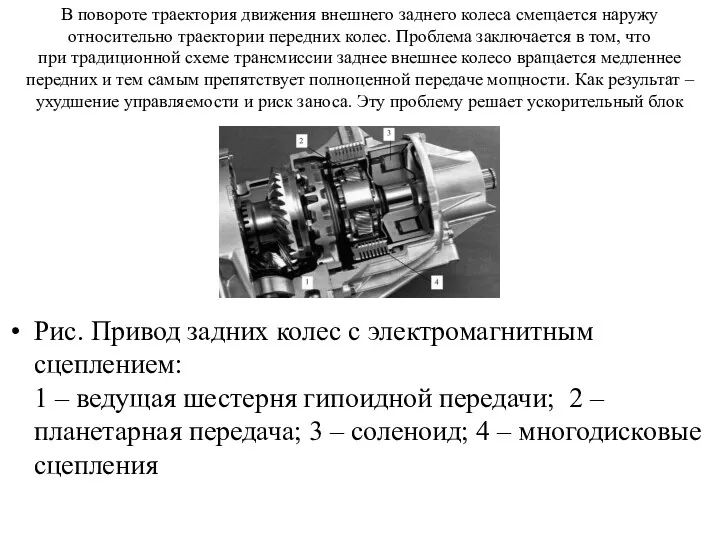
- 14. В повороте траектория движения внешнего заднего колеса смещается наружу относительно траектории передних колес. Проблема заключается в
- 15. В повороте траектория движения внешнего заднего колеса смещается наружу относительно траектории передних колес. Проблема заключается в
- 16. Во время движения по прямой, шестерни планетарной передачи вращаются синхронно с карданным валом – скорость передних
- 17. Блок управления, воспринимая сигнала датчиков, может определять стиль вождения. Когда автомобиль едет прямо, фрикционы разомкнуты и
- 18. Если водитель вводит автомобиль в поворот, держа ногу на педали акселератора реакция электронной системы управления будет
- 19. При резком трогании с места у полноприводных автомобилей возникает дефицит крутящего момента на колесах задней оси
- 21. Скачать презентацию
Система активного распределения крутящего момента ATTS (Active Torque Transfer System) служит
Система активного распределения крутящего момента ATTS (Active Torque Transfer System) служит
При повороте автомобиля на колеса автомобиля действуют две главные силы –
При повороте автомобиля на колеса автомобиля действуют две главные силы –
Рассмотрим распределение сил на колесах при повороте автомобиля
Распределение сил на колесах
Рассмотрим распределение сил на колесах при повороте автомобиля Распределение сил на колесах
При повороте из-за действия центробежной силы внутреннее колесо оказывается разгруженным, то
При повороте из-за действия центробежной силы внутреннее колесо оказывается разгруженным, то
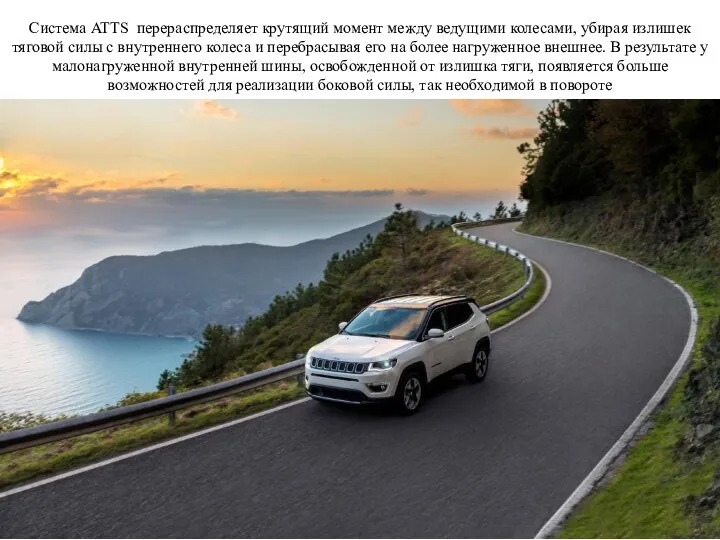
Система ATTS перераспределяет крутящий момент между ведущими колесами, убирая излишек тяговой
Система ATTS перераспределяет крутящий момент между ведущими колесами, убирая излишек тяговой
Увеличение крутящего момента на наружном колесе позволяет создать дополнительный момент, который
Увеличение крутящего момента на наружном колесе позволяет создать дополнительный момент, который
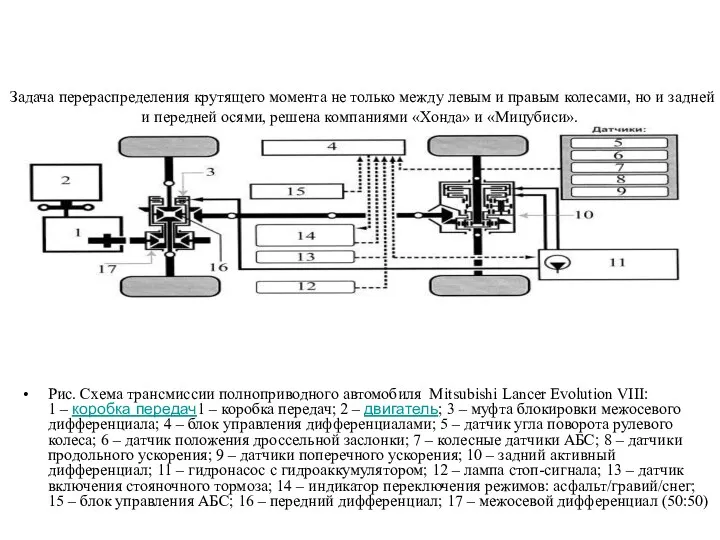
Задача перераспределения крутящего момента не только между левым и правым колесами,
Задача перераспределения крутящего момента не только между левым и правым колесами,

Информация от всех датчиков поступает в ЭБУ, рассчитывает оптимальное распределение крутящего момента по
Информация от всех датчиков поступает в ЭБУ, рассчитывает оптимальное распределение крутящего момента по
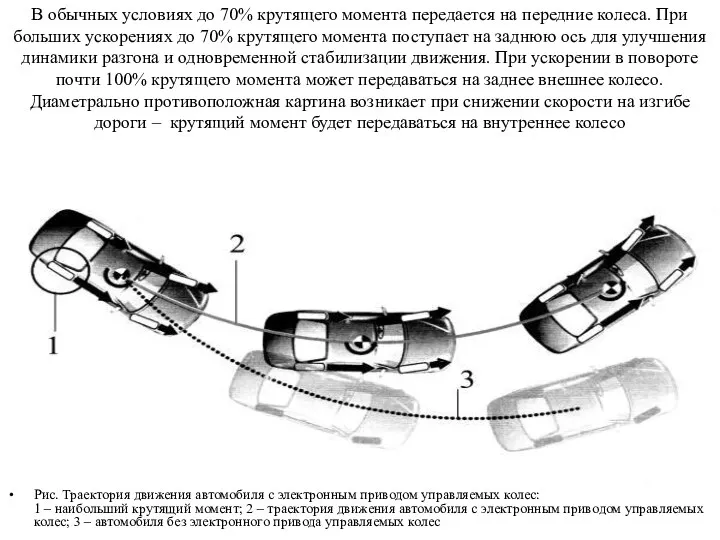
В обычных условиях до 70% крутящего момента передается на передние колеса. При больших ускорениях до 70% крутящего момента поступает
В обычных условиях до 70% крутящего момента передается на передние колеса. При больших ускорениях до 70% крутящего момента поступает
Существуют различия в приводе дисков сцеплений приводов колес. Компания «Мицубиси» в
Существуют различия в приводе дисков сцеплений приводов колес. Компания «Мицубиси» в
В дифференциале автомобилей «Хонда» применяются электромагнитные многодисковые сцепления 4. Каждое сцепление
В дифференциале автомобилей «Хонда» применяются электромагнитные многодисковые сцепления 4. Каждое сцепление

Модули сцепления дополнены собственными планетарными передачами 2.
Вместе с дифференциалом работает ускорительный модуль с
Модули сцепления дополнены собственными планетарными передачами 2. Вместе с дифференциалом работает ускорительный модуль с

В повороте траектория движения внешнего заднего колеса смещается наружу относительно траектории передних колес. Проблема заключается в том,
В повороте траектория движения внешнего заднего колеса смещается наружу относительно траектории передних колес. Проблема заключается в том,
В повороте траектория движения внешнего заднего колеса смещается наружу относительно траектории передних колес. Проблема заключается в том,
В повороте траектория движения внешнего заднего колеса смещается наружу относительно траектории передних колес. Проблема заключается в том,

Во время движения по прямой, шестерни планетарной передачи вращаются синхронно с карданным валом – скорость
Во время движения по прямой, шестерни планетарной передачи вращаются синхронно с карданным валом – скорость
Блок управления, воспринимая сигнала датчиков, может определять стиль вождения. Когда автомобиль
Блок управления, воспринимая сигнала датчиков, может определять стиль вождения. Когда автомобиль

Если водитель вводит автомобиль в поворот, держа ногу на педали акселератора реакция
Если водитель вводит автомобиль в поворот, держа ногу на педали акселератора реакция

При резком трогании с места у полноприводных автомобилей возникает дефицит крутящего момента на колесах задней
При резком трогании с места у полноприводных автомобилей возникает дефицит крутящего момента на колесах задней
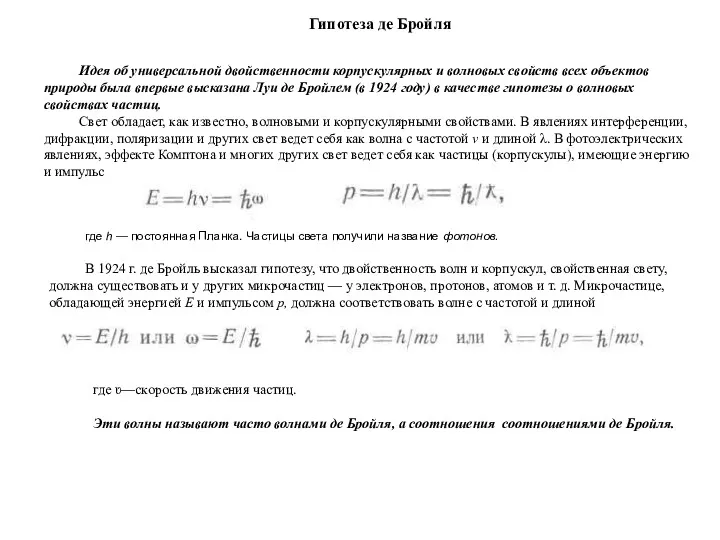 Гипотеза де Бройля. Комптоновская длина волны и длина волны де Бройля
Гипотеза де Бройля. Комптоновская длина волны и длина волны де Бройля Применение сообщающихся сосудов
Применение сообщающихся сосудов Исследовательская деятельность на уроках физики
Исследовательская деятельность на уроках физики Загальні відомості про насоси
Загальні відомості про насоси Субмикронная литография
Субмикронная литография Радиоактивность. Модели атомов. Опыт Резерфорда
Радиоактивность. Модели атомов. Опыт Резерфорда Адсорбция үдерісі
Адсорбция үдерісі Диагностирование системы смазки двигателя
Диагностирование системы смазки двигателя Линейные излучающие системы
Линейные излучающие системы Ядерная физика (Лекция 9)
Ядерная физика (Лекция 9) Графическое представление движения. Урок физики. 7 класс
Графическое представление движения. Урок физики. 7 класс Строение атома
Строение атома Цепные передачи
Цепные передачи Yüzey ve kompozi̇syon (9)
Yüzey ve kompozi̇syon (9) Lasers. Tutorial 2
Lasers. Tutorial 2 Презентация к уроку в 7 классе по теме Масса тела.Измерение массы тела с помощью весов
Презентация к уроку в 7 классе по теме Масса тела.Измерение массы тела с помощью весов Основные положения молекулярно-кинетической теории. Размеры молекул
Основные положения молекулярно-кинетической теории. Размеры молекул Сценарий урока в 9 классе Величина, характеризующие колебательное движение
Сценарий урока в 9 классе Величина, характеризующие колебательное движение Взаимодействие тел. Масса тела.
Взаимодействие тел. Масса тела. Фотоосновы. Экспозиция
Фотоосновы. Экспозиция Сила упругости. Закон Гука. 7 класс
Сила упругости. Закон Гука. 7 класс Открытый урок в 7 кл на тему Плавание тел
Открытый урок в 7 кл на тему Плавание тел Измерение размеров малых тел. Лабораторная работа
Измерение размеров малых тел. Лабораторная работа Тліючий розряд
Тліючий розряд Технические измерения. Допуски и посадки гладких цилиндрических соединений деталей (гцс)
Технические измерения. Допуски и посадки гладких цилиндрических соединений деталей (гцс) Гидравлический привод сцепления автомобиля Камаз
Гидравлический привод сцепления автомобиля Камаз Высокоточные системы навигации. Лекция №1.3
Высокоточные системы навигации. Лекция №1.3 ЖРД. Устройство и принцип действия, внутрикамерные процессы. (Лекция 2)
ЖРД. Устройство и принцип действия, внутрикамерные процессы. (Лекция 2)