- Физические основы механики. Кинематика. Лекция 1

Содержание
- 2. План лекции
- 3. Введение В первом семестре Вы прослушали курс «Введение в физику», который охватывал сразу несколько разделов физики.
- 4. Об учебниках Введение Трофимова Таисия Ивановна, «Курс физики», любое издание после 2005 года. Обязательный учебник. Иродов
- 5. Раздел 1. Основные понятия кинематики
- 6. 1. Основные понятия кинематики Кинематика – это раздел механики. Механика – наука о механическом движении и
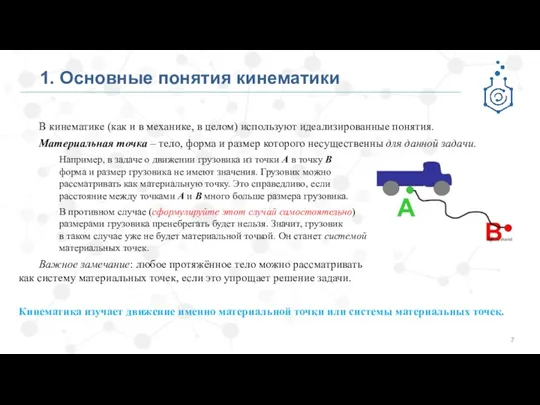
- 7. 1. Основные понятия кинематики В кинематике (как и в механике, в целом) используют идеализированные понятия. Материальная
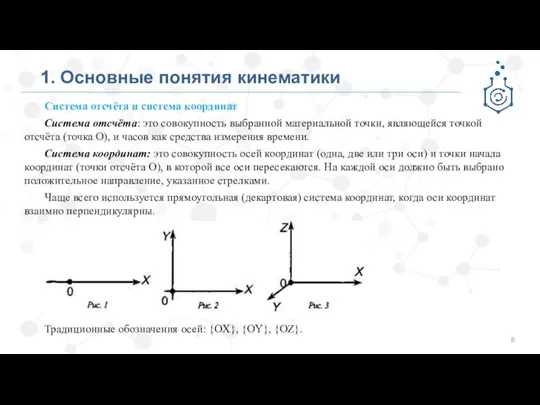
- 8. 1. Основные понятия кинематики Система отсчёта и система координат Система отсчёта: это совокупность выбранной материальной точки,
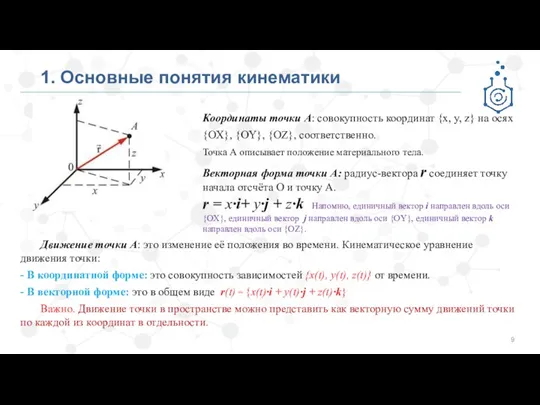
- 9. 1. Основные понятия кинематики Координаты точки А: совокупность координат {x, y, z} на осях {OX}, {OY},
- 10. Раздел 2. Характеристики движения
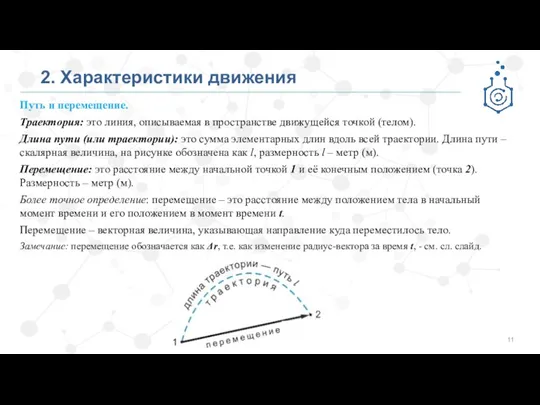
- 11. 2. Характеристики движения Путь и перемещение. Траектория: это линия, описываемая в пространстве движущейся точкой (телом). Длина
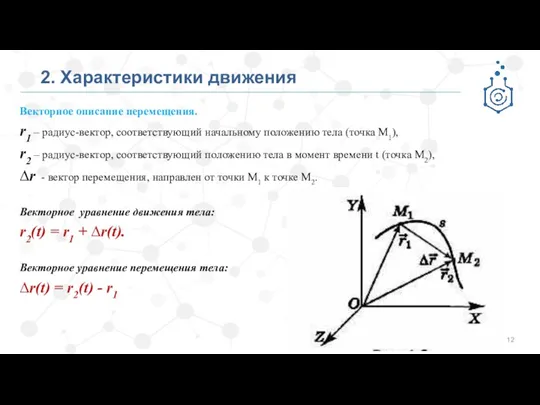
- 12. 2. Характеристики движения Векторное описание перемещения. r1 – радиус-вектор, соответствующий начальному положению тела (точка М1), r2
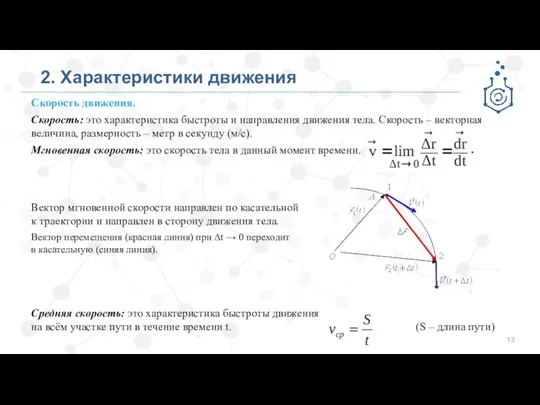
- 13. 2. Характеристики движения Скорость движения. Скорость: это характеристика быстроты и направления движения тела. Скорость – векторная
- 14. 2. Характеристик движения Проекции вектора скорости. Вектор скорости v в прямоугольной (декартовой) системе координат записывается подобно
- 15. 2. Характеристики движения Ускорение. Ускорение: это характеристика быстроты изменения вектора скорости. Ускорение – векторная величина, размерность
- 16. Раздел 3. Некоторые виды движения материальной точки
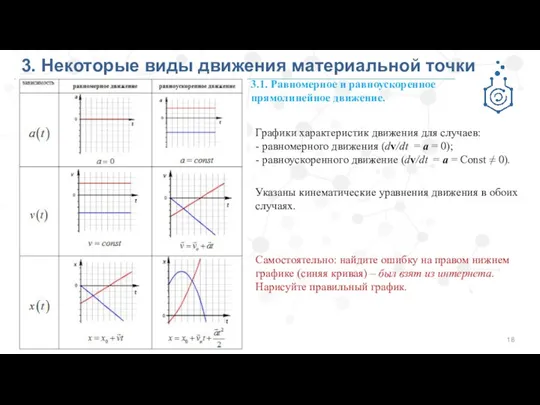
- 17. 3. Некоторые виды движения материальной точки 3.1. Равномерное и равноускоренное прямолинейное движение. Рассматривается прямолинейный случай, т.е.
- 18. 3. Некоторые виды движения материальной точки Графики характеристик движения для случаев: - равномерного движения (dv/dt =
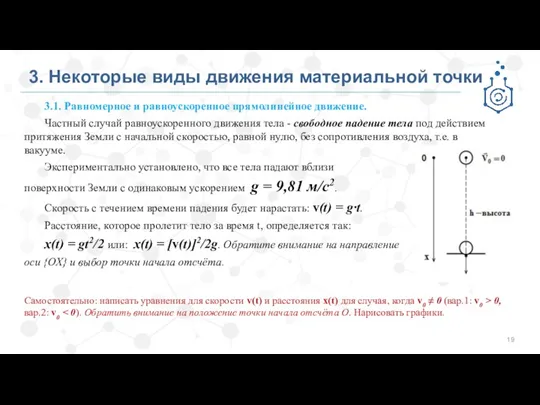
- 19. 3. Некоторые виды движения материальной точки 3.1. Равномерное и равноускоренное прямолинейное движение. Частный случай равноускоренного движения
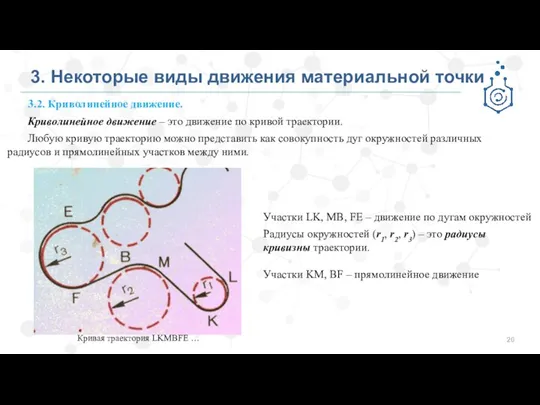
- 20. 3. Некоторые виды движения материальной точки 3.2. Криволинейное движение. Криволинейное движение – это движение по кривой
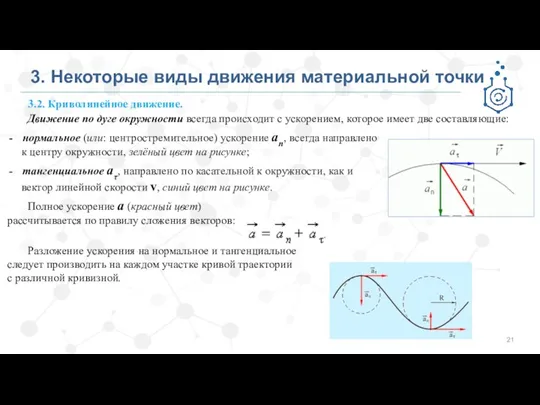
- 21. 3. Некоторые виды движения материальной точки 3.2. Криволинейное движение. Движение по дуге окружности всегда происходит с
- 22. Нормальное (или: центростремительное) ускорение an рассчитывается так: R – радиус кривизны v – линейная скорость Тангенциальное
- 23. Движение по прямолинейным участкам кривой траектории – это движение по инерции. При этом: - вектор скорости
- 24. Раздел 4. Поступательное движение твёрдого тела
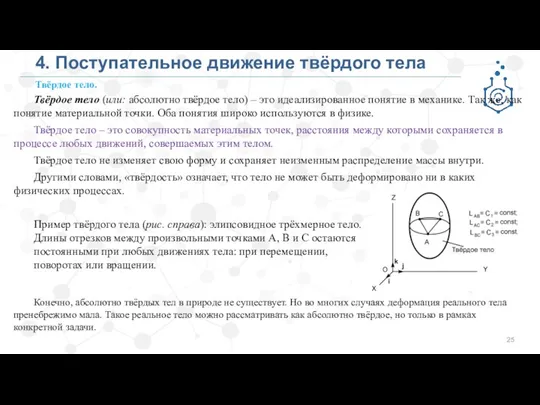
- 25. 4. Поступательное движение твёрдого тела Твёрдое тело (или: абсолютно твёрдое тело) – это идеализированное понятие в
- 26. 4. Поступательное движение твёрдого тела Понятие поступательного движения твёрдого тела. Поступательное движение твёрдого тела – это
- 28. Скачать презентацию
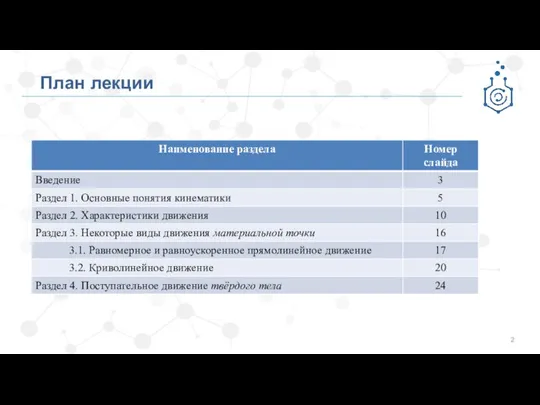
План лекции
План лекции
Введение
В первом семестре Вы прослушали курс «Введение в физику», который
Введение
В первом семестре Вы прослушали курс «Введение в физику», который
Об учебниках
Введение
Трофимова Таисия Ивановна, «Курс физики», любое издание после 2005
Об учебниках
Введение
Трофимова Таисия Ивановна, «Курс физики», любое издание после 2005
Раздел 1. Основные понятия кинематики
Раздел 1. Основные понятия кинематики
1. Основные понятия кинематики
Кинематика – это раздел механики.
Механика – наука о
1. Основные понятия кинематики
Кинематика – это раздел механики.
Механика – наука о
1. Основные понятия кинематики
В кинематике (как и в механике, в целом)
1. Основные понятия кинематики
В кинематике (как и в механике, в целом)
1. Основные понятия кинематики
Система отсчёта и система координат
Система отсчёта: это совокупность
1. Основные понятия кинематики
Система отсчёта и система координат
Система отсчёта: это совокупность
1. Основные понятия кинематики
Координаты точки А: совокупность координат {x, y, z}
1. Основные понятия кинематики
Координаты точки А: совокупность координат {x, y, z}
Раздел 2. Характеристики движения
Раздел 2. Характеристики движения
2. Характеристики движения
Путь и перемещение.
Траектория: это линия, описываемая в пространстве движущейся
2. Характеристики движения
Путь и перемещение.
Траектория: это линия, описываемая в пространстве движущейся
2. Характеристики движения
Векторное описание перемещения.
r1 – радиус-вектор, соответствующий начальному положению тела
2. Характеристики движения
Векторное описание перемещения.
r1 – радиус-вектор, соответствующий начальному положению тела
2. Характеристики движения
Скорость движения.
Скорость: это характеристика быстроты и направления движения тела.
2. Характеристики движения
Скорость движения.
Скорость: это характеристика быстроты и направления движения тела.
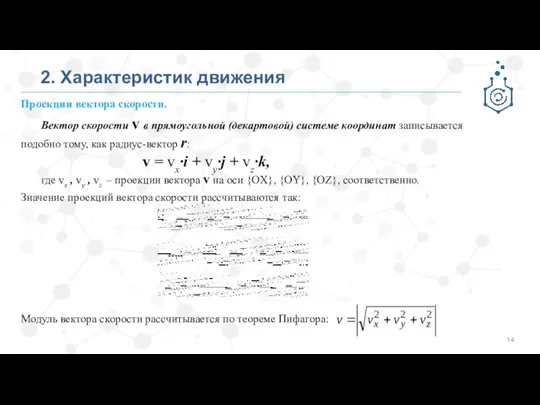
2. Характеристик движения
Проекции вектора скорости.
Вектор скорости v в прямоугольной (декартовой) системе
2. Характеристик движения
Проекции вектора скорости.
Вектор скорости v в прямоугольной (декартовой) системе
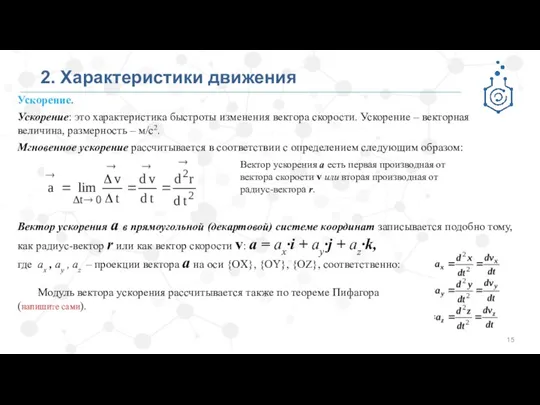
2. Характеристики движения
Ускорение.
Ускорение: это характеристика быстроты изменения вектора скорости. Ускорение –
2. Характеристики движения
Ускорение.
Ускорение: это характеристика быстроты изменения вектора скорости. Ускорение –
Раздел 3. Некоторые виды движения
материальной точки
Раздел 3. Некоторые виды движения
материальной точки
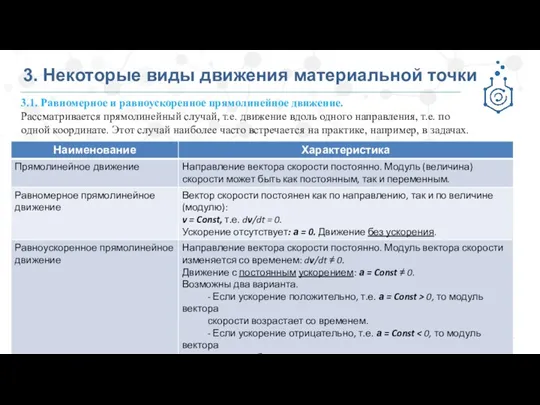
3. Некоторые виды движения материальной точки
3.1. Равномерное и равноускоренное прямолинейное движение.
Рассматривается
3. Некоторые виды движения материальной точки
3.1. Равномерное и равноускоренное прямолинейное движение.
Рассматривается
3. Некоторые виды движения материальной точки
Графики характеристик движения для случаев:
- равномерного
3. Некоторые виды движения материальной точки
Графики характеристик движения для случаев:
- равномерного
3. Некоторые виды движения материальной точки
3.1. Равномерное и равноускоренное прямолинейное движение.
Частный
3. Некоторые виды движения материальной точки
3.1. Равномерное и равноускоренное прямолинейное движение.
Частный
3. Некоторые виды движения материальной точки
3.2. Криволинейное движение.
Криволинейное движение – это
3. Некоторые виды движения материальной точки
3.2. Криволинейное движение.
Криволинейное движение – это
3. Некоторые виды движения материальной точки
3.2. Криволинейное движение.
Движение по дуге окружности
3. Некоторые виды движения материальной точки
3.2. Криволинейное движение.
Движение по дуге окружности
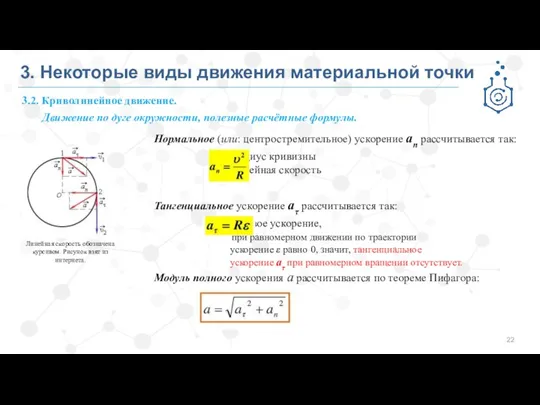
Нормальное (или: центростремительное) ускорение an рассчитывается так:
R – радиус кривизны
v –
Нормальное (или: центростремительное) ускорение an рассчитывается так:
R – радиус кривизны
v –
Движение по прямолинейным участкам кривой траектории – это движение по инерции.
При
Движение по прямолинейным участкам кривой траектории – это движение по инерции.
При
Раздел 4. Поступательное движение
твёрдого тела
Раздел 4. Поступательное движение
твёрдого тела
4. Поступательное движение твёрдого тела
Твёрдое тело (или: абсолютно твёрдое тело) – это
4. Поступательное движение твёрдого тела
Твёрдое тело (или: абсолютно твёрдое тело) – это
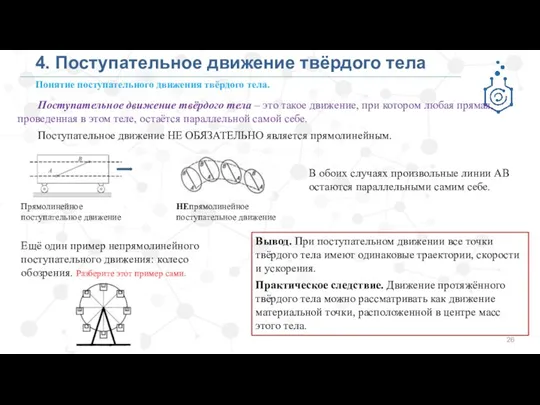
4. Поступательное движение твёрдого тела
Понятие поступательного движения твёрдого тела.
Поступательное движение твёрдого
4. Поступательное движение твёрдого тела
Понятие поступательного движения твёрдого тела.
Поступательное движение твёрдого
 Статистическое описание системы частиц
Статистическое описание системы частиц Урок решение задач по теме: Сила
Урок решение задач по теме: Сила Конспект урока по теме Плотность вещества
Конспект урока по теме Плотность вещества Godfrin Cryocoolers
Godfrin Cryocoolers Физика – это интересно! Внеклассное мероприятие по физике. 7 класс
Физика – это интересно! Внеклассное мероприятие по физике. 7 класс Давление. Атмосфернео давление. Закон паскаля. Закон архимеда
Давление. Атмосфернео давление. Закон паскаля. Закон архимеда Презентация к уроку физики в 8 классе. Лампа накаливания.
Презентация к уроку физики в 8 классе. Лампа накаливания.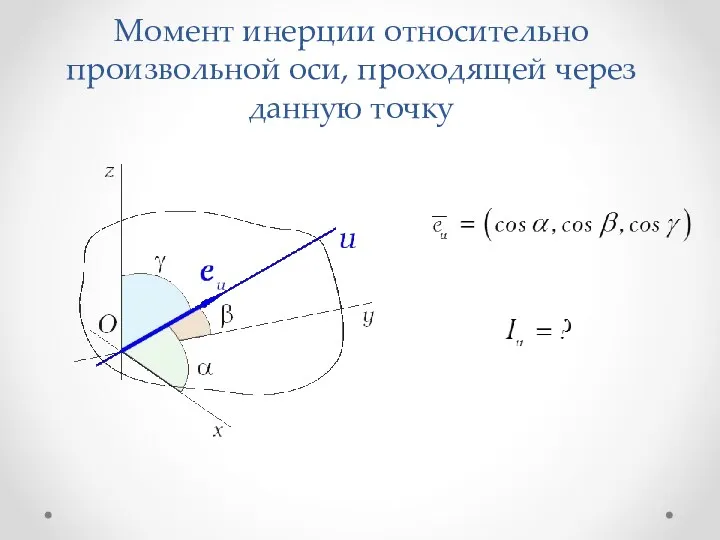 Момент инерции относительно произвольной оси, проходящей через данную точку. (Лекция 5)
Момент инерции относительно произвольной оси, проходящей через данную точку. (Лекция 5)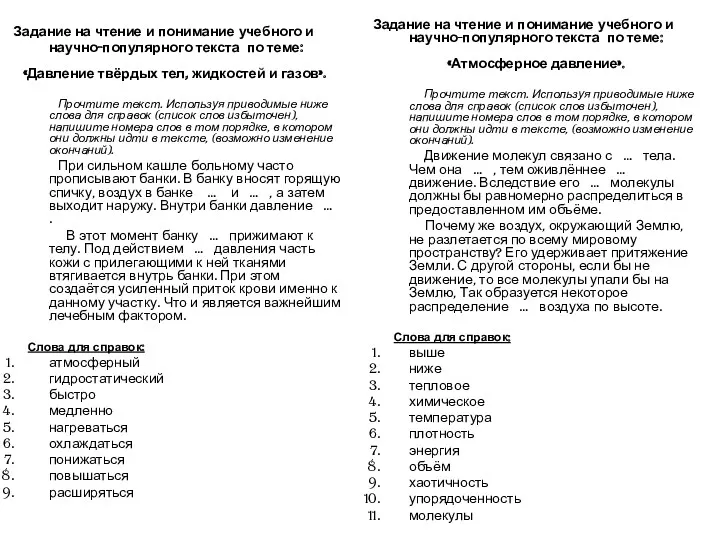 7 класс.Задания по физике на чтение и понимание учебного и научно-популярного текста по темам: Строение атома,Давление твёрдых тел, жидкостей и газов,Атмосферное давление,Энергия.
7 класс.Задания по физике на чтение и понимание учебного и научно-популярного текста по темам: Строение атома,Давление твёрдых тел, жидкостей и газов,Атмосферное давление,Энергия.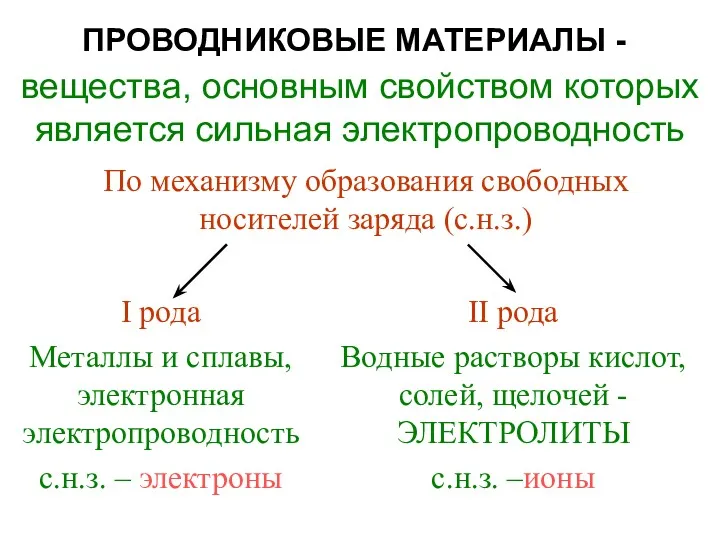 Проводниковые материалы
Проводниковые материалы 濽á ÒÓÒúßÔ¿ ºá¬¡ âÒ¬á
濽á ÒÓÒúßÔ¿ ºá¬¡ âÒ¬á Основы электродинамики. Электростатика
Основы электродинамики. Электростатика Действие физических и химических факторов окружающей среды на микроорганизмы
Действие физических и химических факторов окружающей среды на микроорганизмы Электрический ток в полупроводниках
Электрический ток в полупроводниках Дефекты поршневой группы, оценка состояния и влияние на надежность
Дефекты поршневой группы, оценка состояния и влияние на надежность Проекционный аппарат
Проекционный аппарат Генератор переменного тока. Виды генераторов
Генератор переменного тока. Виды генераторов Теплообмен излучением между телами, разделённой прозрачной средой. Коэффициент облучённости. Теплообмен между телами
Теплообмен излучением между телами, разделённой прозрачной средой. Коэффициент облучённости. Теплообмен между телами Дыбыс, кең мағынасында
Дыбыс, кең мағынасында Тепловые явления. Температура
Тепловые явления. Температура Содержание курса физики основной школы наше время
Содержание курса физики основной школы наше время Давление. Действие силы (7 класс)
Давление. Действие силы (7 класс) Использование информационно – коммуникационных технологий в процессе обучения физике
Использование информационно – коммуникационных технологий в процессе обучения физике ”Равноускоренное движение”
”Равноускоренное движение” Попов Александр Степанович
Попов Александр Степанович Получение и передача переменного электрического тока
Получение и передача переменного электрического тока Электроемкость. Конденсаторы. Энергия заряженного конденсатора
Электроемкость. Конденсаторы. Энергия заряженного конденсатора Топологические изоляторы и смежные вопросы
Топологические изоляторы и смежные вопросы