- Кинематические характеристики движения точки

Содержание
- 2. 1.3. Кинематические характеристики точки При координатном способе задания движения При естественном способе задания движения Вектор ускорения
- 3. Опр. Средней скоростью точки называется отношение Кинематические характеристики точки при ее векторном способе задания движения Опр.
- 4. Вывод. Вектор скорости точки в момент времени t равен первой производной по времени от радиуса вектора
- 5. За промежуток времени △ t = t1 – t скорость точки получит приращение всегда направлен в
- 6. Движение материальной точки М задано уравнением Задание 1. Вектор скорости точки направлен … Варианты ответа 1)
- 7. Задание 2. Движение материальной точки М задано уравнением Вектор ускорения точки направлен … Варианты ответа 1)
- 8. Вектор скорости точки Отсюда, учитывая, что rх = х , rу = у, rz = z
- 9. Вывод. Проекции скорости точек на координатные оси равны первым производным от соответствующих координат точки по времени.
- 10. Тогда на основании формулы (1) получаем: Определение ускорения точки Вектор ускорения точки (5) Вывод. Проекции ускорения
- 11. Вывод. Если движение точки задано координатным способом, т. е. заданы уравнения движения: то скорость точки определяется
- 12. Кинематические характеристики точки при ее естественном способе задания движения Оси естественного трехгранника s Скорости и ускорения
- 13. Определение скорости точки Вектор скорости точки всегда направлен по касательной к ее траектории, поэтому проектируется только
- 14. Вывод. Вектор скорости точки в данный момент времени направлен по касательной к траектории точки, а алгебраическое
- 15. направлен по главной нормали и называется нормальным ускорением. направлен по касательной и называется касательным ускорением. Определение
- 16. (6) а направление - по формуле (5) Модуль полного ускорения определиться в виде Если аτ >
- 17. 1.4. Некоторые частные случаи движения точки Прямолинейное движение Равномерное криволинейное движение Равномерное прямолинейное движение Равнопеременное криволинейное
- 18. При прямолинейном движении ρ = ∞ и аn= V 2/∞ = 0, то есть ускорение точки
- 19. то есть ускорение точки равно только одному нормальному ускорению: а = аn . Закон равномерного движения
- 20. Так как движение прямолинейное, то ρ = ∞ и аn= V 2/∞ = 0, и так
- 21. Вывод. При равнопеременном криволинейном движении точки ее скорость изменяется по закону: V = VО + аτ
- 22. Вывод. Движение будет ускоренным, если знаки V и аτ совпадают (Рис.а)), и замедленным, если знаки противоположные
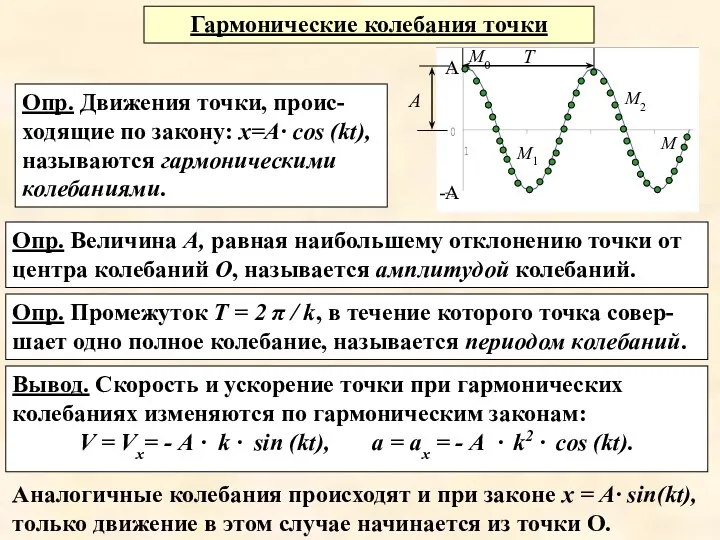
- 23. Гармонические колебания точки Опр. Движения точки, проис-ходящие по закону: x=А· cos (kt), называются гармоническими колебаниями. Опр.
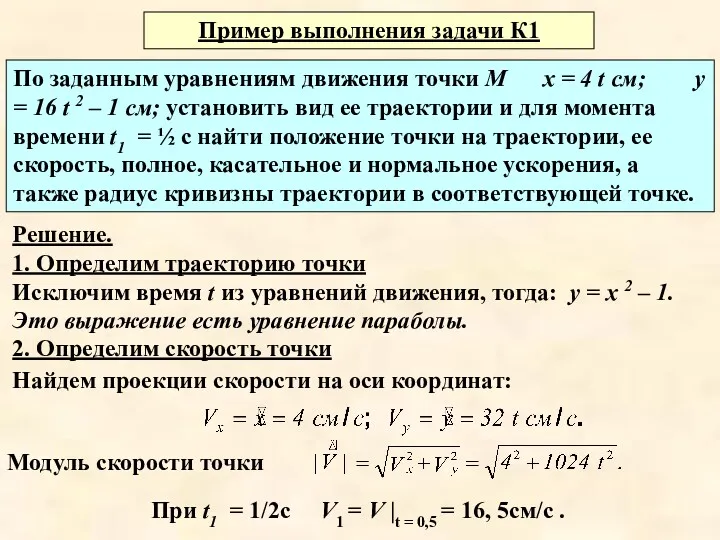
- 24. Пример выполнения задачи К1 По заданным уравнениям движения точки М х = 4 t см; у
- 25. 3. Определим ускорение точки Найдем проекции ускорения на оси координат: Модуль ускорения точки 4. Определим касательное
- 26. 5. Определим нормальное ускорение точки и радиус кривизны траектории при t1 = 1/2 с . Из
- 28. Скачать презентацию
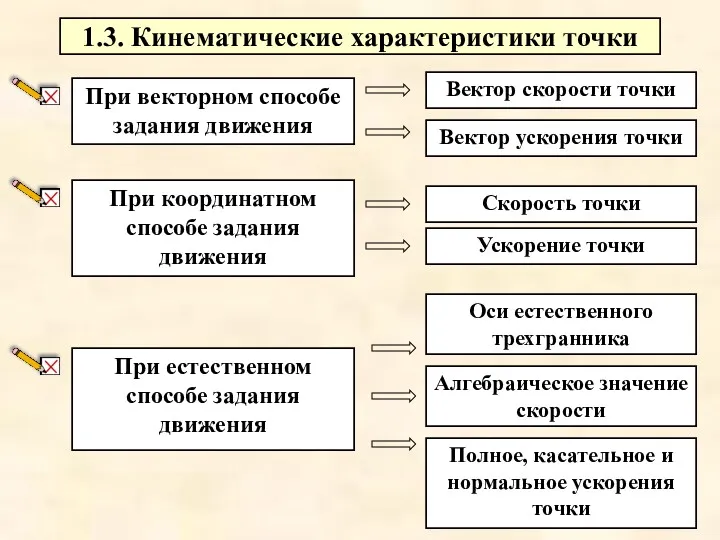
1.3. Кинематические характеристики точки
При координатном способе задания движения
При естественном
1.3. Кинематические характеристики точки
При координатном способе задания движения
При естественном
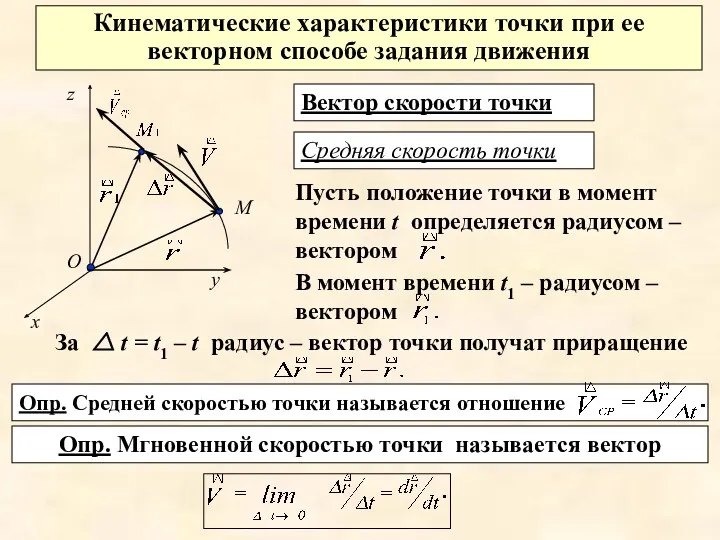
Опр. Средней скоростью точки называется отношение
Кинематические характеристики точки при ее
Опр. Средней скоростью точки называется отношение
Кинематические характеристики точки при ее
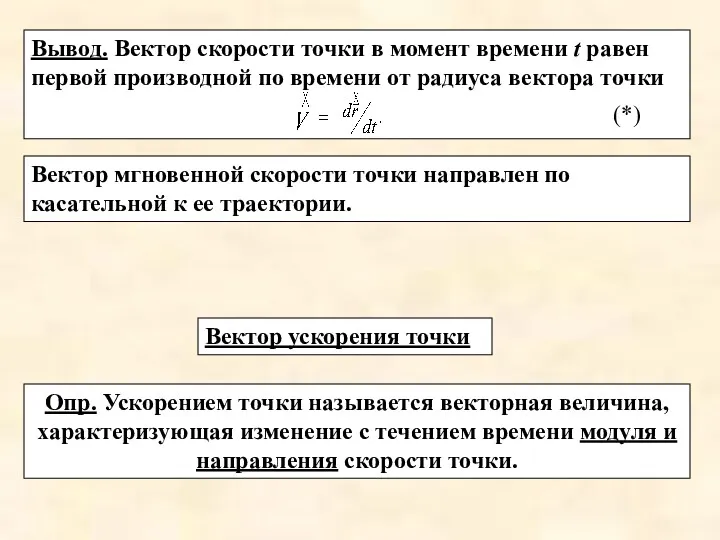
Вывод. Вектор скорости точки в момент времени t равен первой производной
Вывод. Вектор скорости точки в момент времени t равен первой производной
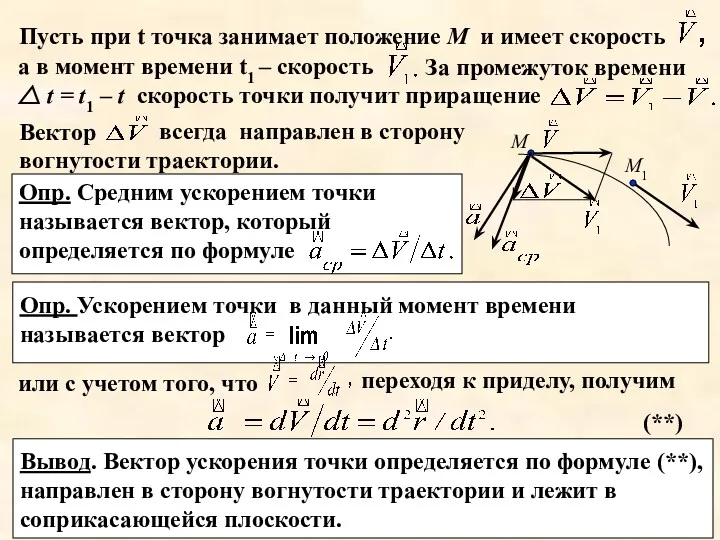
За промежуток времени △ t = t1 – t скорость
За промежуток времени △ t = t1 – t скорость
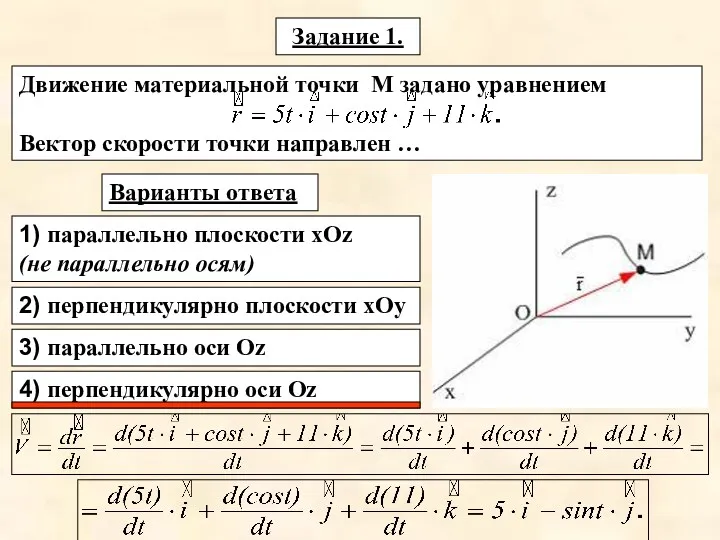
Движение материальной точки М задано уравнением
Задание 1.
Вектор скорости точки
Движение материальной точки М задано уравнением
Задание 1.
Вектор скорости точки
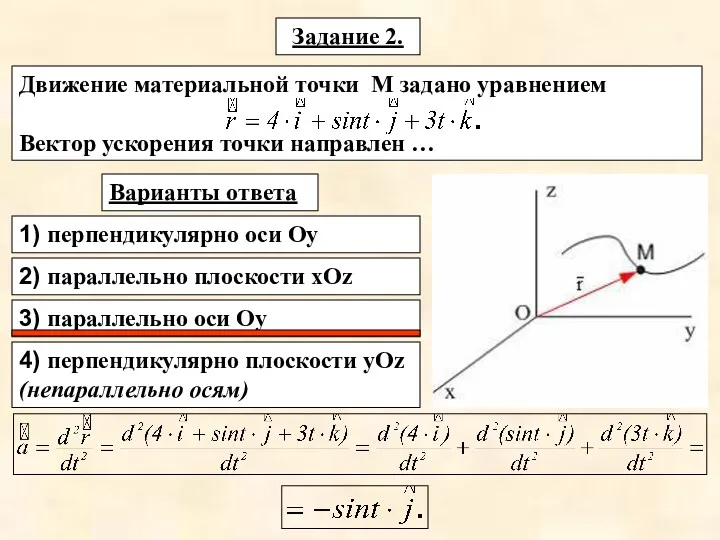
Задание 2.
Движение материальной точки М задано уравнением
Вектор ускорения точки
Задание 2.
Движение материальной точки М задано уравнением
Вектор ускорения точки
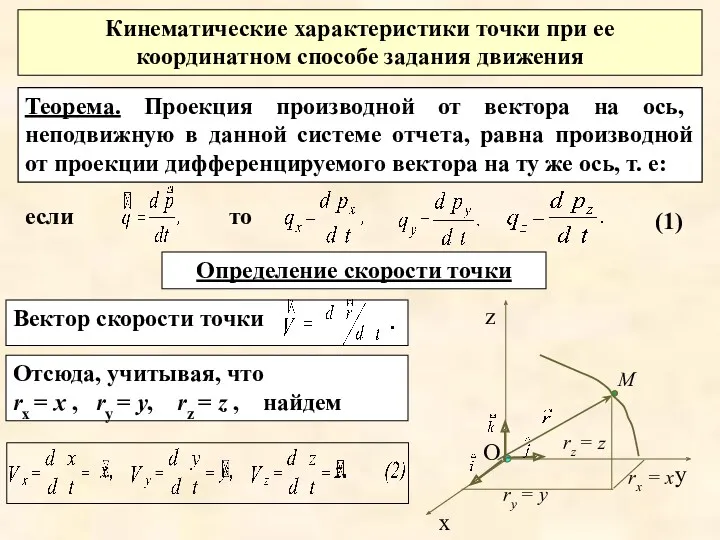
Вектор скорости точки
Отсюда, учитывая, что
rх = х , rу
Вектор скорости точки
Отсюда, учитывая, что
rх = х , rу
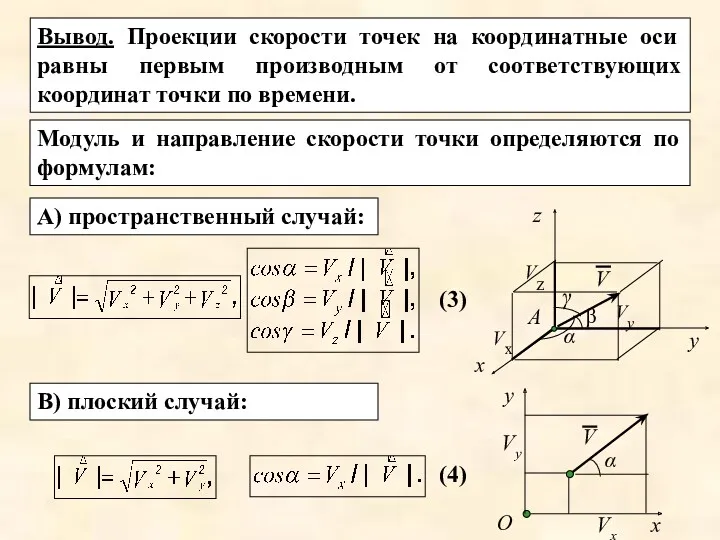
Вывод. Проекции скорости точек на координатные оси равны первым производным от
Вывод. Проекции скорости точек на координатные оси равны первым производным от
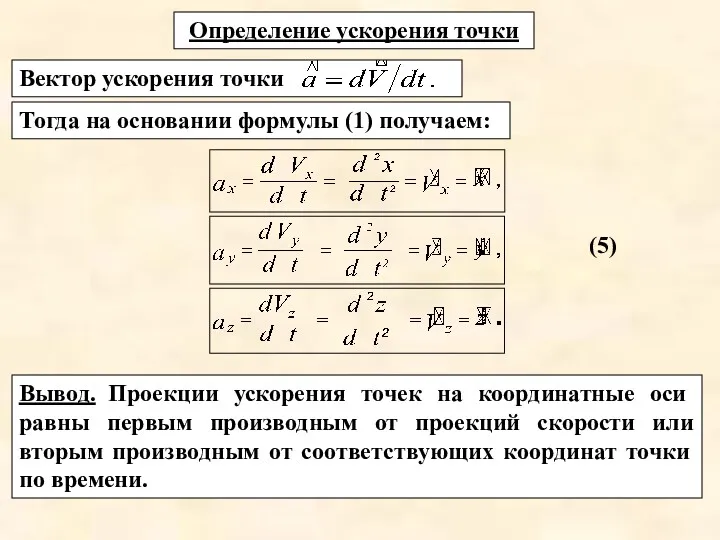
Тогда на основании формулы (1) получаем:
Определение ускорения точки
Вектор ускорения точки
Тогда на основании формулы (1) получаем:
Определение ускорения точки
Вектор ускорения точки
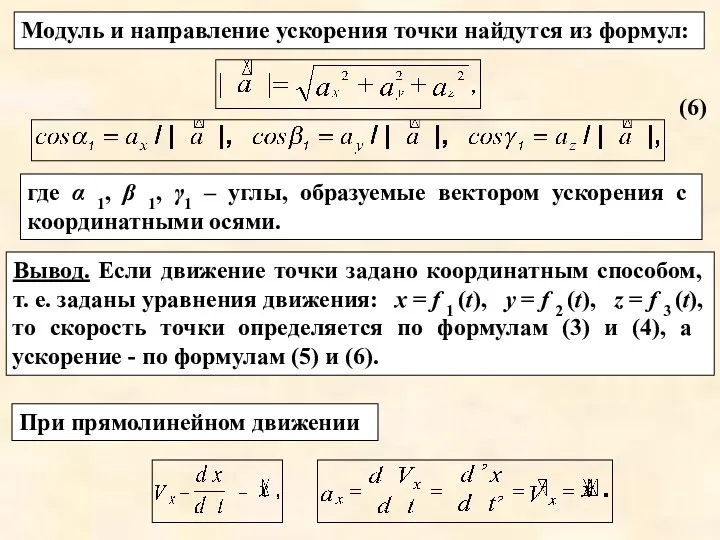
Вывод. Если движение точки задано координатным способом, т. е. заданы уравнения
Вывод. Если движение точки задано координатным способом, т. е. заданы уравнения
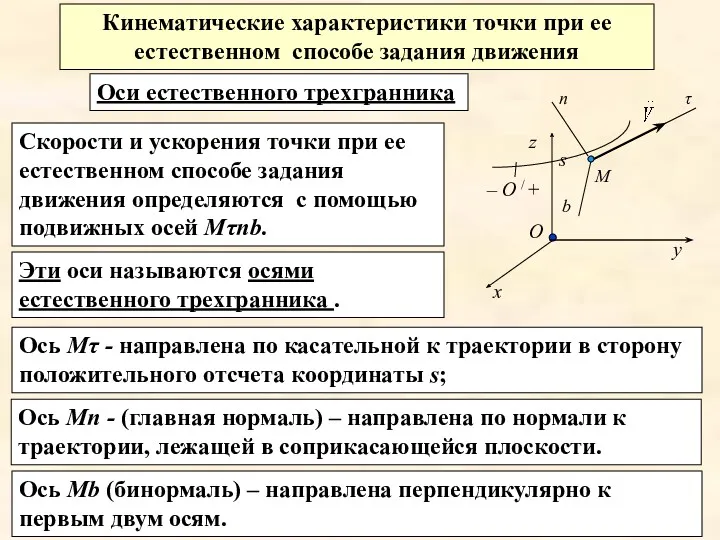
Кинематические характеристики точки при ее естественном способе задания движения
Оси естественного
Кинематические характеристики точки при ее естественном способе задания движения
Оси естественного
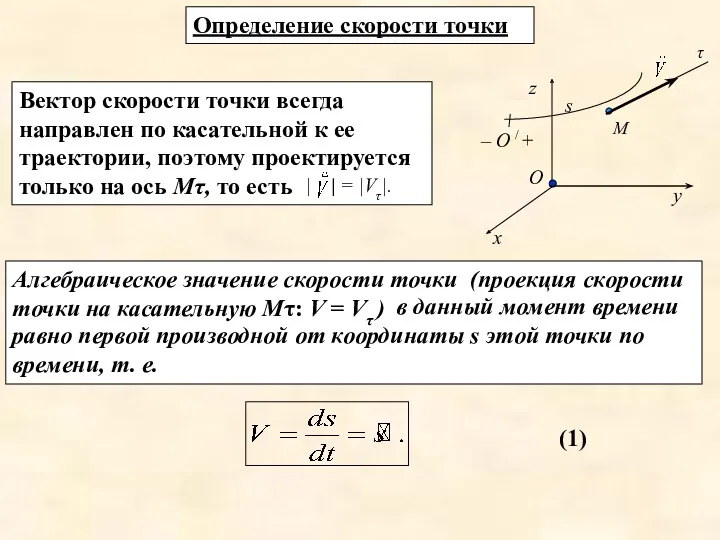
Определение скорости точки
Вектор скорости точки всегда направлен по касательной к ее
Определение скорости точки
Вектор скорости точки всегда направлен по касательной к ее
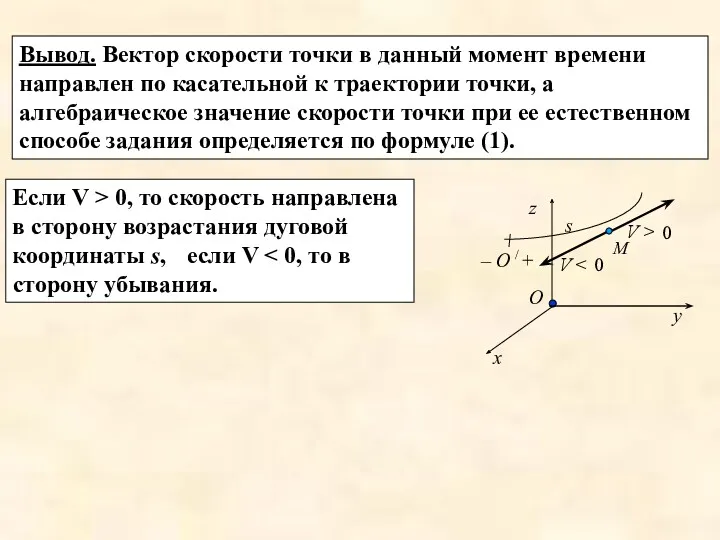
Вывод. Вектор скорости точки в данный момент времени направлен по касательной
Вывод. Вектор скорости точки в данный момент времени направлен по касательной
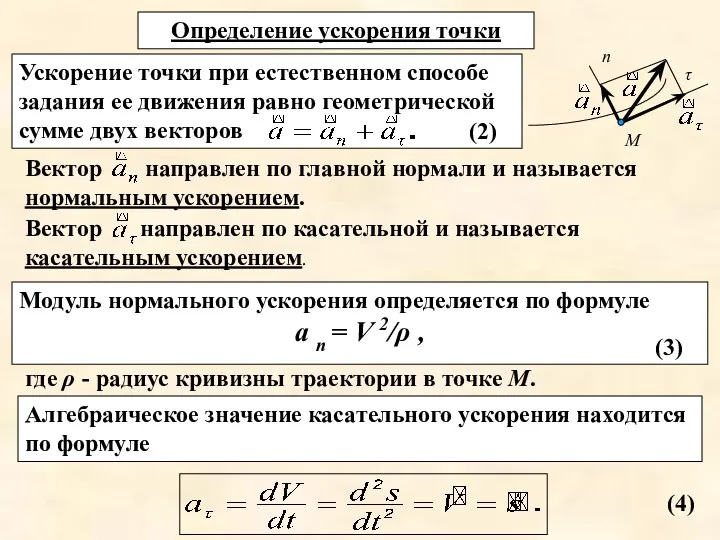
направлен по главной нормали и называется нормальным ускорением.
направлен по
направлен по главной нормали и называется нормальным ускорением.
направлен по
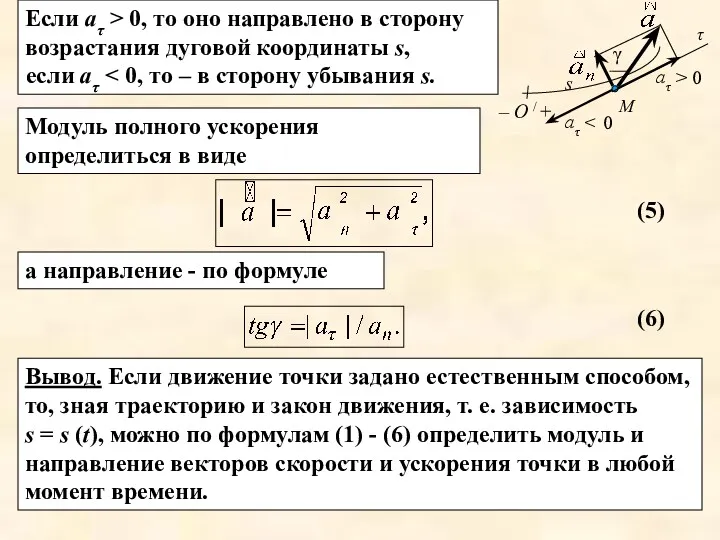
(6)
а направление - по формуле
(5)
Модуль полного ускорения определиться в виде
Если
а направление - по формуле
(5)
Модуль полного ускорения определиться в виде
Если

1.4. Некоторые частные случаи движения точки
Прямолинейное движение
Равномерное криволинейное движение
Равномерное прямолинейное движение
Равнопеременное
1.4. Некоторые частные случаи движения точки
Прямолинейное движение
Равномерное криволинейное движение
Равномерное прямолинейное движение
Равнопеременное
При прямолинейном движении ρ = ∞ и аn= V 2/∞ =
При прямолинейном движении ρ = ∞ и аn= V 2/∞ =
то есть ускорение точки равно только одному нормальному ускорению: а
то есть ускорение точки равно только одному нормальному ускорению: а
Так как движение прямолинейное, то ρ = ∞ и аn= V
Так как движение прямолинейное, то ρ = ∞ и аn= V
Вывод. При равнопеременном криволинейном движении точки ее скорость изменяется по закону:
Вывод. При равнопеременном криволинейном движении точки ее скорость изменяется по закону:
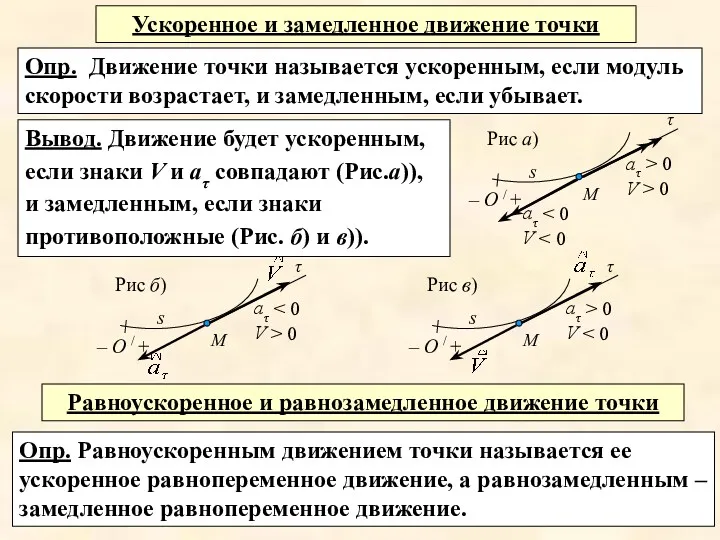
Вывод. Движение будет ускоренным, если знаки V и аτ совпадают (Рис.а)),
Вывод. Движение будет ускоренным, если знаки V и аτ совпадают (Рис.а)),
Гармонические колебания точки
Опр. Движения точки, проис-ходящие по закону: x=А· cos (kt),
Гармонические колебания точки
Опр. Движения точки, проис-ходящие по закону: x=А· cos (kt),
Пример выполнения задачи К1
По заданным уравнениям движения точки М х =
Пример выполнения задачи К1
По заданным уравнениям движения точки М х =
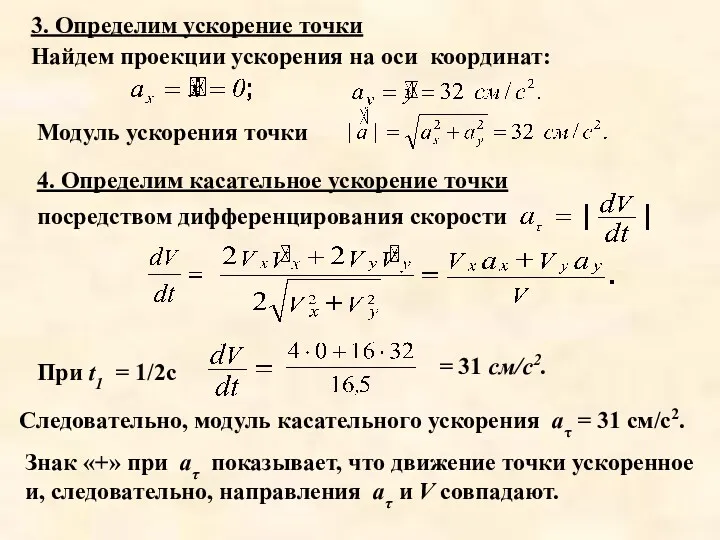
3. Определим ускорение точки
Найдем проекции ускорения на оси координат:
Модуль ускорения точки
3. Определим ускорение точки
Найдем проекции ускорения на оси координат:
Модуль ускорения точки
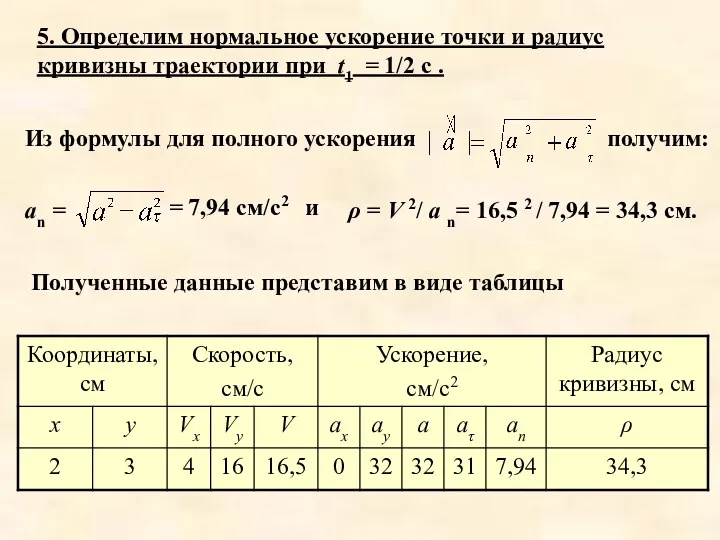
5. Определим нормальное ускорение точки и радиус кривизны траектории при t1
5. Определим нормальное ускорение точки и радиус кривизны траектории при t1
 Зубчатые передачи
Зубчатые передачи Лекция 16. Электромагнитные волны
Лекция 16. Электромагнитные волны Электроемкость. Конденсаторы
Электроемкость. Конденсаторы Голография
Голография Волновая оптика
Волновая оптика Метод я́дерного магни́тного резона́нса
Метод я́дерного магни́тного резона́нса Инструментальные методы исследования органических веществ. Спектроскопические методы – ЯМР (часть 3)
Инструментальные методы исследования органических веществ. Спектроскопические методы – ЯМР (часть 3) Engine
Engine Определение предмета биофизики
Определение предмета биофизики Детали машин и механизмов. Основные положения и понятия раздела
Детали машин и механизмов. Основные положения и понятия раздела Ця важка робота
Ця важка робота Источники электрического тока. Физика. 8 класс
Источники электрического тока. Физика. 8 класс Испарение и конденсация. Кипение жидкости
Испарение и конденсация. Кипение жидкости Методы моментов. Метод сферических гармоник. Уравнение переноса в Р1-приближении. Диффузионное приближение
Методы моментов. Метод сферических гармоник. Уравнение переноса в Р1-приближении. Диффузионное приближение Детали машин и основы конструирования. Общие сведения. (Раздел 1)
Детали машин и основы конструирования. Общие сведения. (Раздел 1) Двигатель внутреннего сгорания
Двигатель внутреннего сгорания Распространение радиоволн. Радиолокация
Распространение радиоволн. Радиолокация Викторина Что, Где, Когда, Почему?
Викторина Что, Где, Когда, Почему? Инженерные конструкции
Инженерные конструкции Физика и познание мира. Экспериментальный характер физики. Классическая механика Ньютона
Физика и познание мира. Экспериментальный характер физики. Классическая механика Ньютона Решение задач по теме Световые явления
Решение задач по теме Световые явления презентация урока Закон Ома для участка цепи
презентация урока Закон Ома для участка цепи Сила трения (презентация к уроку)
Сила трения (презентация к уроку) Механические колебания. (11 класс)
Механические колебания. (11 класс) Современные тепловые двигатели
Современные тепловые двигатели Динамометр. Механический динамометр
Динамометр. Механический динамометр Волновые механические передачи
Волновые механические передачи Строение коробки-автомат с гидротрансформатором
Строение коробки-автомат с гидротрансформатором