- Волновые механические передачи

Содержание
- 2. Волновые механические передачи Общие сведения Волновая передача основана на принципе преобразования параметров движения вследствие волнового деформирования
- 3. Волновые механические передачи Рис. 1
- 4. Волновые механические передачи Обладая рядом положительных качеств, волновая передача получила широкое распространение. За последние годы запатентовано
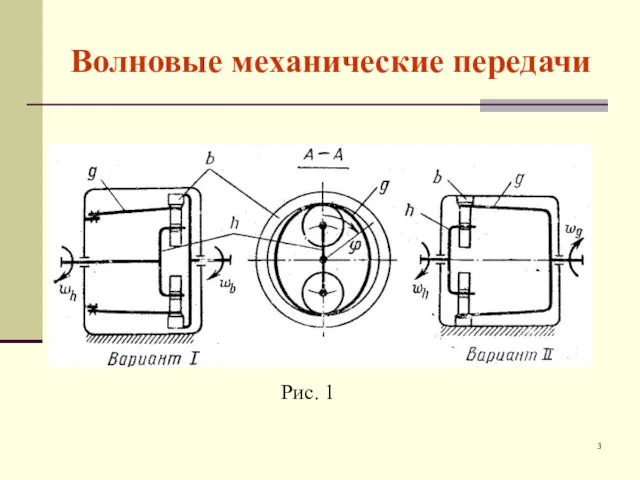
- 5. Волновые механические передачи Схема волновой передачи изображена на рис. 1. Передача состоит из трех основных элементов:
- 6. Волновые механические передачи В конструкциях по рис. 1 гибкое колесо выполняют в виде гибкого цилиндра. В
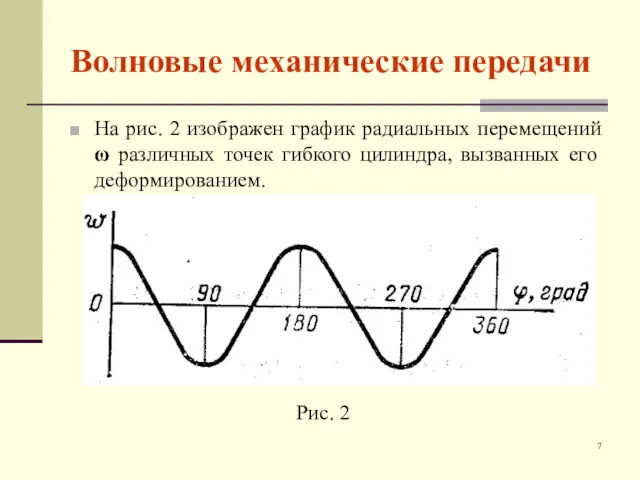
- 7. Волновые механические передачи На рис. 2 изображен график радиальных перемещений ω различных точек гибкого цилиндра, вызванных
- 8. Волновые механические передачи за координату по оси абсцисс принят угол ϕ (см. рис. 1). Перемещения отсчитываем
- 9. Волновые механические передачи На развертке. окружности укладывается две волны. Такую передачy называют двуволновой. Известны передачи с
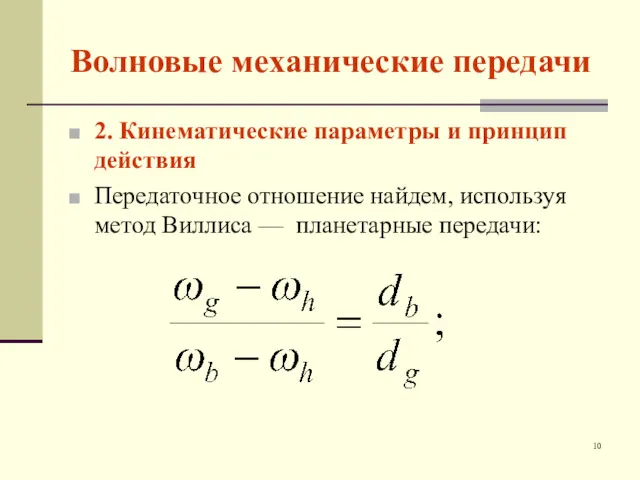
- 10. Волновые механические передачи 2. Кинематические параметры и принцип действия Передаточное отношение найдем, используя метод Виллиса —
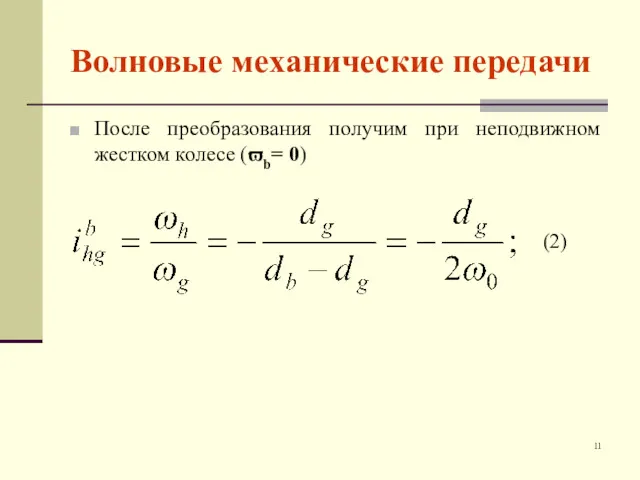
- 11. Волновые механические передачи После преобразования получим при неподвижном жестком колесе (ϖb= 0) (2)
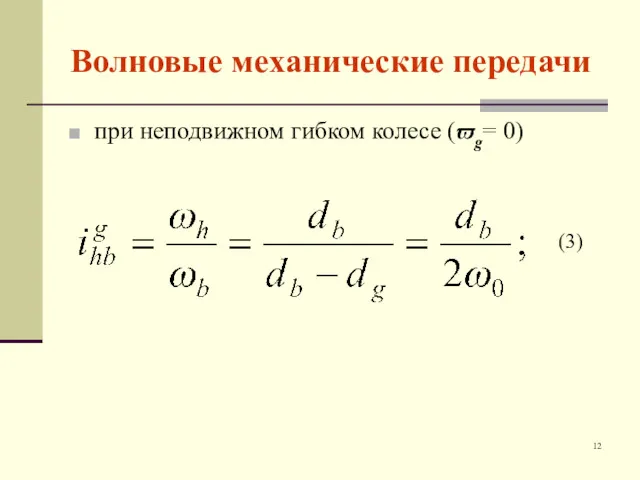
- 12. Волновые механические передачи при неподвижном гибком колесе (ϖg= 0) (3)
- 13. Волновые механические передачи В простой передаче i равно отношению радиусов колес, а в волновой—-отношению радиуса ведомого
- 14. Волновые механические передачи Практически выполняют imax ≈ 1000. Значение imin ограничивает прочность гибких колес, так как
- 15. Волновые механические передачи Метод Виллиса позволяет просто получить формулы для передаточных отношений, но не вскрывает принципа
- 16. Волновые механические передачи Рис. 3
- 17. Волновые механические передачи В теории оболочек обычно рассматривают перемещения точек срединной поверхности (поверхность посредине толщины оболочки)
- 18. Волновые механические передачи Полагаем, что генератор обеспечивает деформирование края цилиндра по форме, для которой где ϕ1—
- 19. Волновые механические передачи По условиям конструкции функция Ф1(ϕ1) должна быть периодической (период π) с максимумами в
- 20. Волновые механические передачи По условию прочности значение ω0 в волновых передачах обычно не превышает толщины цилиндра.
- 21. Волновые механические передачи ОБЩИЕ СВЕДЕНИЯ О ВОЛНОВЫХ ЗУБЧАТЫХ ПЕРЕДАЧАХ. Действие волновых зубчатых передач основано на преобразовании
- 22. Волновые механические передачи Рис 6.1 Схемы образования передач а — планетарной, б — волновой с одной
- 23. Волновые механические передачи Гибкость оболочки позволяет обеспечивать передачу движения с промежуточного колеса на ведомый вал Передача,
- 24. Волновые механические передачи Имеется много модификаций волновых передач, применяемых в станкостроении, подъемно-транспортном машиностроении, авиационной технике и
- 25. Волновые механические передачи
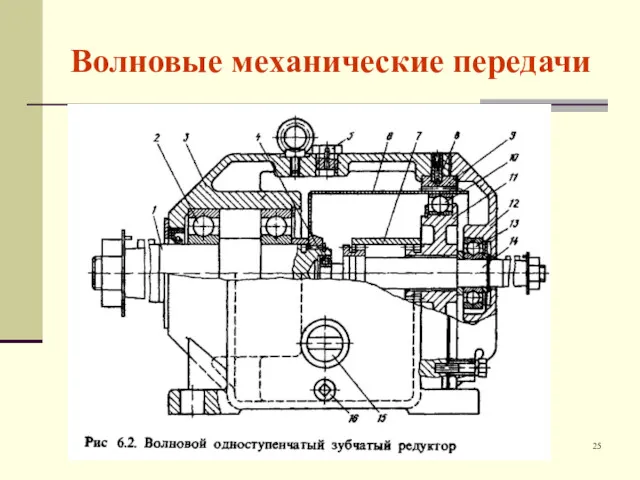
- 26. Волновые механические передачи На рис 6.2 представлена конструкция одноступенчатого волнового зубчатого редуктора, выпускаемого промышленностью Редуктор имеет
- 27. Волновые механические передачи В ступице днища имеются шлицы для соединения с выходным валом, вращающимся на двух
- 28. Волновые механические передачи
- 29. Волновые механические передачи КОНСТРУКЦИИ ОСНОВНЫХ ДЕТАЛЕЙ ВОЛНОВЫХ ПЕРЕДАЧ. МАТЕРИАЛЫ Основные звенья передач. На рис. 6.3 изображены
- 30. Волновые механические передачи В конструкции типа труба-стакан (рис. 6.3,б) гибкий цилиндр с дном соединены шлицами. В
- 31. Волновые механические передачи Циклически изменяющиеся напряжения, возникающие в гибком колесе в процессе работы передачи, высоки, поэтому
- 32. Волновые механические передачи
- 33. Волновые механические передачи На рис. 6.4, а жесткое колесо 7 установлено в корпус 2 с натягом
- 34. Волновые механические передачи
- 35. Волновые механические передачи Механические генераторы волновой деформации. Кулачковый генератор (рис. 6.5, а) имеет профилированный кулачок 1,
- 36. Волновые механические передачи Рис. 6.6. Схема соединения генератора волн с ведущим валом
- 37. Волновые механические передачи У дисковых генераторов отсутствуют гибкие подшипники и профилированный кулачок, что упрощает конструкцию. Это
- 38. Волновые механические передачи Самоустанавливающееся соединение выполняют с помощью жестких шарниров или упругих элементов. В конструкции на
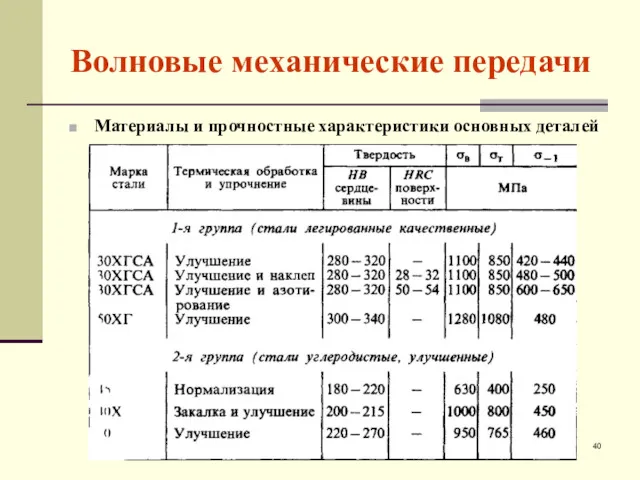
- 39. Волновые механические передачи Материалы основных деталей приведены в табл, 6.1. Гибкие колеса изготовляют из сталей 1-й
- 40. Волновые механические передачи Материалы и прочностные характеристики основных деталей
- 41. Волновые механические передачи РАСЧЕТ ВОЛНОВЫХ ПЕРЕДАЧ Определение основных размеров и чисел зубьев колес. Основной геометрический параметр
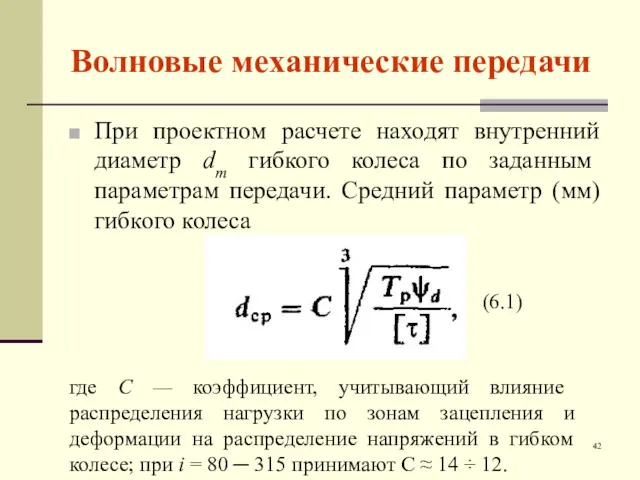
- 42. Волновые механические передачи При проектном расчете находят внутренний диаметр dm гибкого колеса по заданным параметрам передачи.
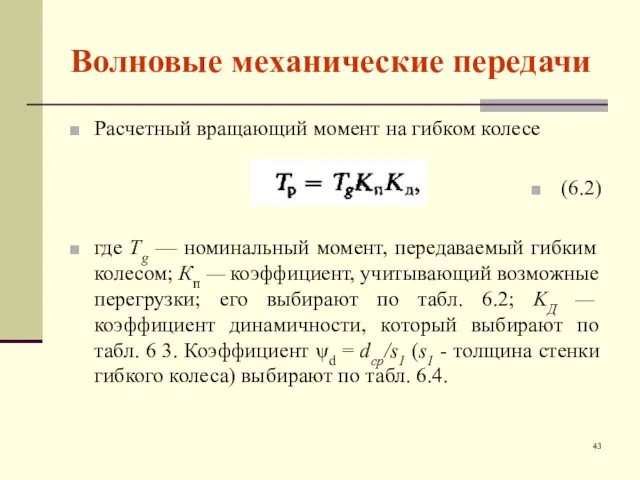
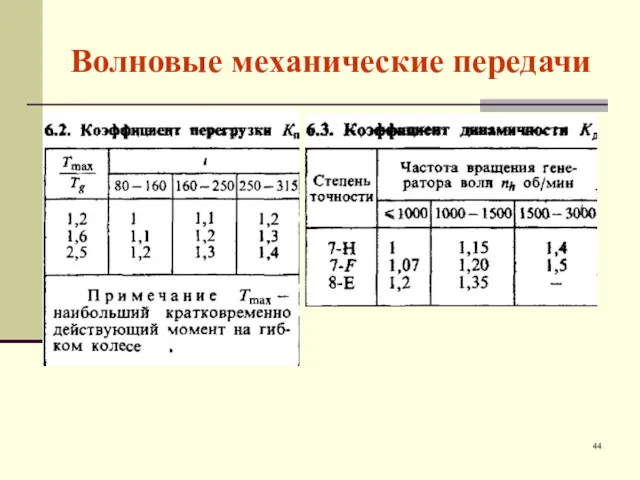
- 43. Волновые механические передачи Расчетный вращающий момент на гибком колесе (6.2) где Tg — номинальный момент, передаваемый
- 44. Волновые механические передачи
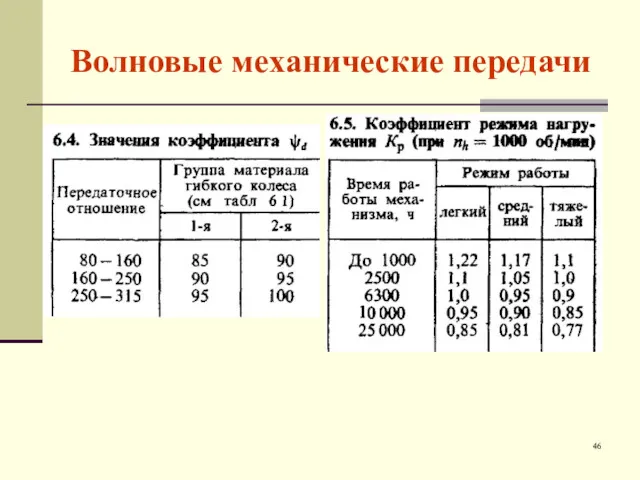
- 45. Волновые механические передачи Допустимое напряжение при кручении с реверсивной нагрузкой (6.3) Для нереверсивных передач [τ] увеличивают
- 46. Волновые механические передачи
- 47. Волновые механические передачи При частоте вращения генератора nh, не равной 1000 об/мин, приведенное время работы (6.4)
- 48. Волновые механические передачи Внутренний диаметр гибкого колеса (6.5) где — толщина стенки гибкого колеса под зубчатым
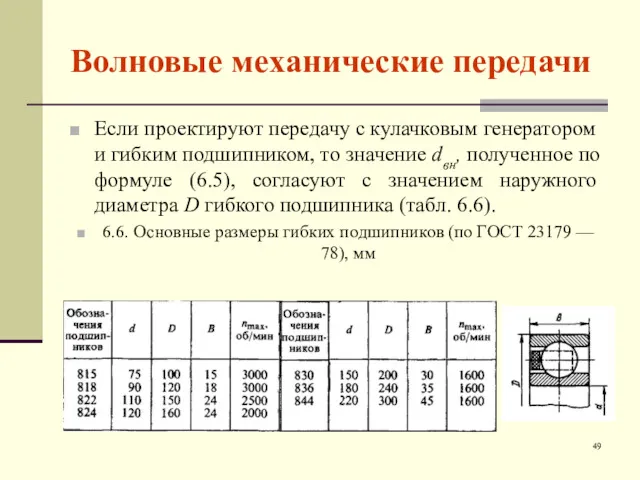
- 49. Волновые механические передачи Если проектируют передачу с кулачковым генератором и гибким подшипником, то значение dвн, полученное
- 50. Волновые механические передачи Диаметр окружности впадин зубчатого венца гибкого колеса (6.6) Модуль зацепления (6.7)
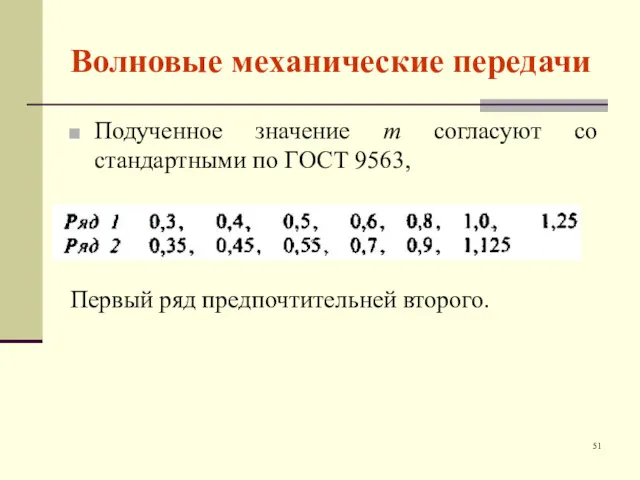
- 51. Волновые механические передачи Подученное значение m согласуют со стандартными по ГОСТ 9563, Первый ряд предпочтительней второго.
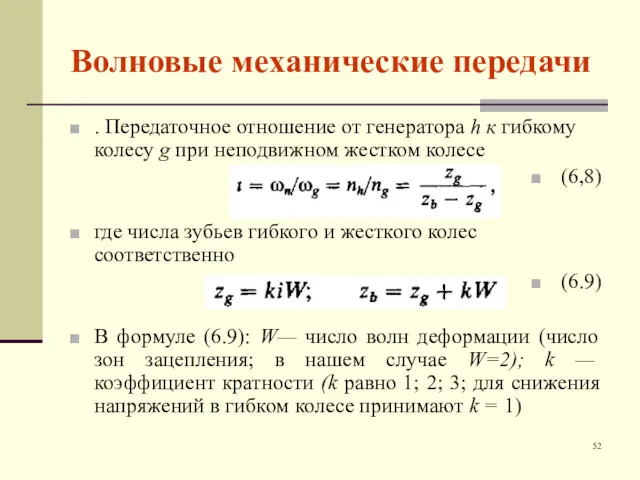
- 52. Волновые механические передачи . Передаточное отношение от генератора h к гибкому колесу g при неподвижном жестком
- 53. Волновые механические передачи Рис. 6.7 Схемы деформации гибкого колеса
- 54. Волновые механические передачи Рациональная схема деформации гибкого колеса кулачковым генератором представлена на рис. 6.7, д. При
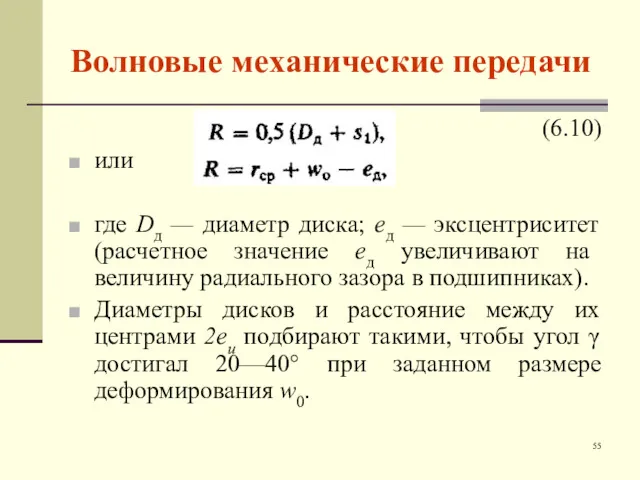
- 55. Волновые механические передачи (6.10) или где Dд — диаметр диска; ед — эксцентриситет (расчетное значение ед
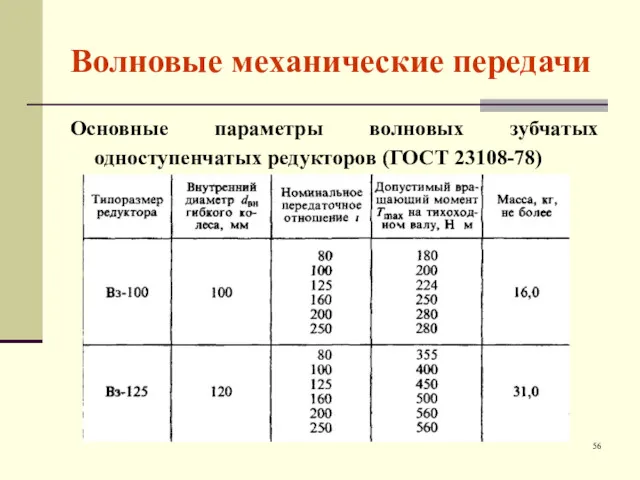
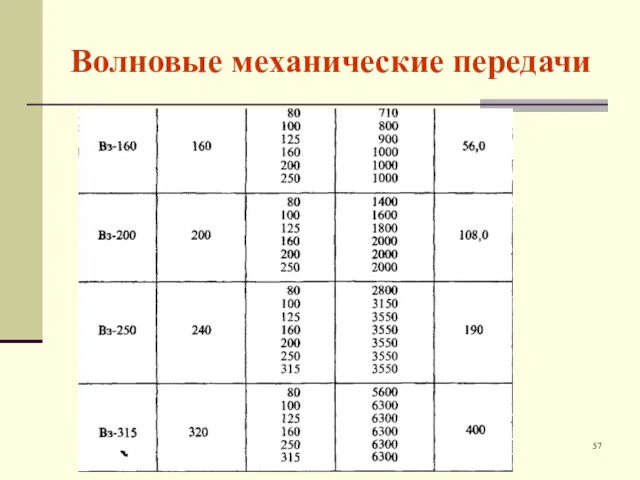
- 56. Волновые механические передачи Основные параметры волновых зубчатых одноступенчатых редукторов (ГОСТ 23108-78)
- 57. Волновые механические передачи
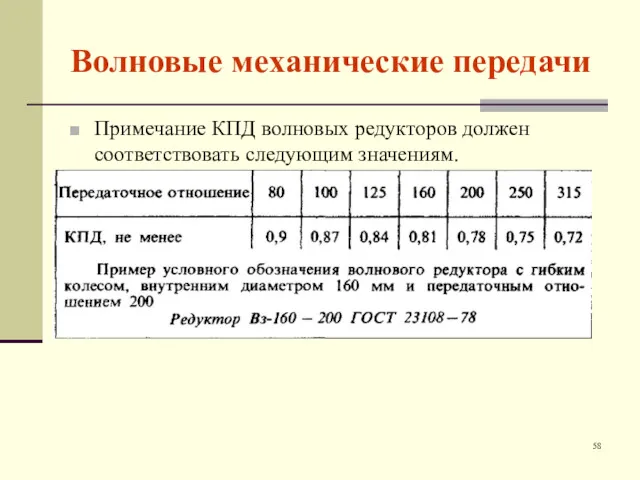
- 58. Волновые механические передачи Примечание КПД волновых редукторов должен соответствовать следующим значениям.
- 59. Волновые механические передачи Радиальная нагрузка в дисковом генераторе волн воспринимается только одним подшипником, расположенным вблизи средней
- 60. Волновые механические передачи Долговечность гибкого подшипника резко снижается, если вследствие чрезмерного натяга полностью устраняется радиальный зазор
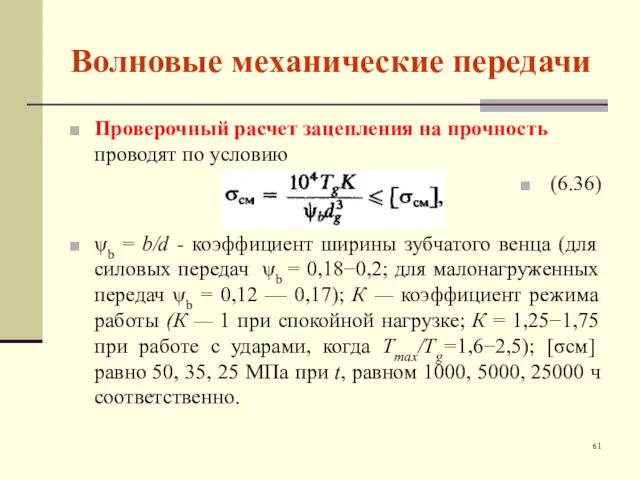
- 61. Волновые механические передачи Проверочный расчет зацепления на прочность проводят по условию (6.36) ψb = b/d -
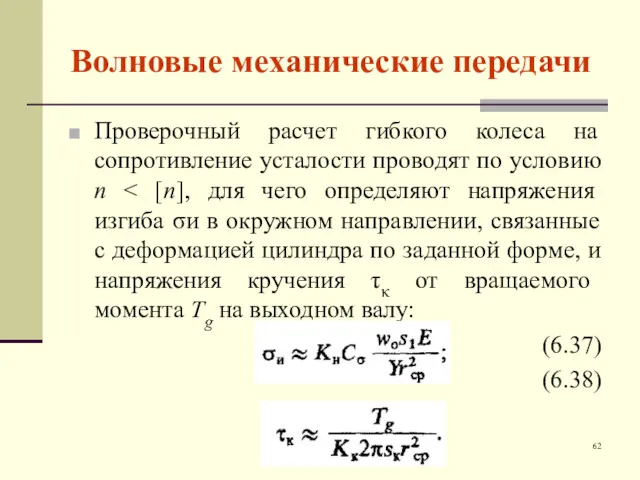
- 62. Волновые механические передачи Проверочный расчет гибкого колеса на сопротивление усталости проводят по условию n (6.37) (6.38)
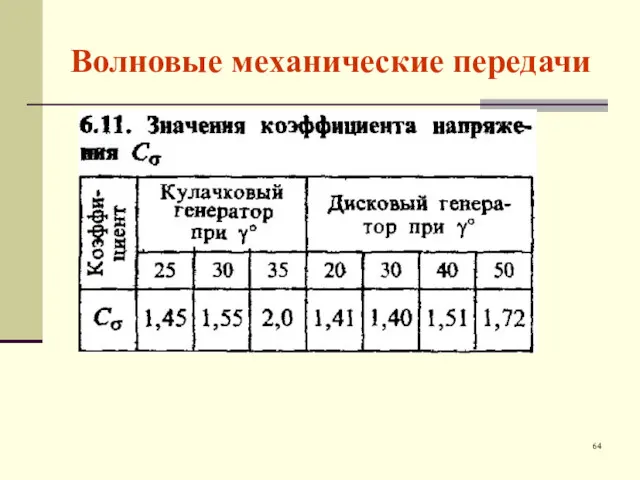
- 63. Волновые механические передачи В формулах (6 37) и (6.38): E — модуль упругости материала; Кн =
- 64. Волновые механические передачи
- 65. Волновые механические передачи Y— коэффициент, учитывающий влияние зубчатого венца на прочность гибкого колеса: (6 39) где
- 66. Волновые механические передачи Толщина зуба у основания (6.40) где; − значения эвольвентных углов по табл. 6,8.
- 67. Волновые механические передачи Коэффициенты запаса прочности; по напряжениям изгиба (6.41)
- 68. Волновые механические передачи по напряжениям кручения (6.42)
- 69. Волновые механические передачи общий (6.43)
- 70. Волновые механические передачи Приближенные эмпирические зависимости пределов выносливости для случаев нагружения с симметричным циклом: для углеродистых
- 71. Волновые механические передачи КПД, смазывание и тепловой режим. Потери мощности в волновых передачах в общем случае
- 72. Волновые механические передачи Поэтому КПД волновых передач принято определять эспериментально; на стадии проектирования (6.44) где Qh
- 73. Волновые механические передачи Для смазывания редукторов общего назначения рекомендуется индустриальное масло типа И-40А. При горизонтальном положении
- 74. Волновые механические передачи Тепловой режим волновой передачи можно определить по уравнению теплового баланса (6.45) где Ρ1
- 75. Волновые механические передачи Под А понимают только ту часть площади наружной поверхности корпуса, которая изнутри омывается
- 77. Скачать презентацию
Волновые механические передачи
Общие сведения
Волновая передача основана на принципе преобразования параметров движения
Волновые механические передачи
Общие сведения
Волновая передача основана на принципе преобразования параметров движения
Волновые механические передачи
Рис. 1
Волновые механические передачи
Рис. 1
Волновые механические передачи
Обладая рядом положительных качеств, волновая передача получила широкое распространение.
Волновые механические передачи
Обладая рядом положительных качеств, волновая передача получила широкое распространение.
Волновые механические передачи
Схема волновой передачи изображена на рис. 1. Передача состоит
Волновые механические передачи
Схема волновой передачи изображена на рис. 1. Передача состоит
Волновые механические передачи
В конструкциях по рис. 1 гибкое колесо выполняют в
Волновые механические передачи
В конструкциях по рис. 1 гибкое колесо выполняют в
Волновые механические передачи
На рис. 2 изображен график радиальных перемещений ω различных
Волновые механические передачи
На рис. 2 изображен график радиальных перемещений ω различных
Волновые механические передачи
за координату по оси абсцисс принят угол ϕ (см.
Волновые механические передачи
за координату по оси абсцисс принят угол ϕ (см.
Волновые механические передачи
На развертке. окружности укладывается две волны. Такую передачy называют
Волновые механические передачи
На развертке. окружности укладывается две волны. Такую передачy называют
Волновые механические передачи
2. Кинематические параметры и принцип действия
Передаточное отношение найдем, используя
Волновые механические передачи
2. Кинематические параметры и принцип действия
Передаточное отношение найдем, используя
Волновые механические передачи
После преобразования получим при неподвижном жестком колесе (ϖb= 0)
(2)
Волновые механические передачи
После преобразования получим при неподвижном жестком колесе (ϖb= 0)
(2)
Волновые механические передачи
при неподвижном гибком колесе (ϖg= 0)
(3)
Волновые механические передачи
при неподвижном гибком колесе (ϖg= 0)
(3)
Волновые механические передачи
В простой передаче i равно отношению радиусов колес, а
Волновые механические передачи
В простой передаче i равно отношению радиусов колес, а
Волновые механические передачи
Практически выполняют imax ≈ 1000. Значение imin ограничивает прочность
Волновые механические передачи
Практически выполняют imax ≈ 1000. Значение imin ограничивает прочность
Волновые механические передачи
Метод Виллиса позволяет просто получить формулы для передаточных отношений,
Волновые механические передачи
Метод Виллиса позволяет просто получить формулы для передаточных отношений,

Волновые механические передачи
Рис. 3
Волновые механические передачи
Рис. 3
Волновые механические передачи
В теории оболочек обычно рассматривают перемещения точек срединной поверхности
Волновые механические передачи
В теории оболочек обычно рассматривают перемещения точек срединной поверхности
Волновые механические передачи
Полагаем, что генератор обеспечивает деформирование края цилиндра по
Волновые механические передачи
Полагаем, что генератор обеспечивает деформирование края цилиндра по
Волновые механические передачи
По условиям конструкции функция Ф1(ϕ1) должна быть периодической (период
Волновые механические передачи
По условиям конструкции функция Ф1(ϕ1) должна быть периодической (период
Волновые механические передачи
По условию прочности значение ω0 в волновых передачах обычно
Волновые механические передачи
По условию прочности значение ω0 в волновых передачах обычно
Волновые механические передачи
ОБЩИЕ СВЕДЕНИЯ О ВОЛНОВЫХ ЗУБЧАТЫХ ПЕРЕДАЧАХ. Действие волновых зубчатых
Волновые механические передачи
ОБЩИЕ СВЕДЕНИЯ О ВОЛНОВЫХ ЗУБЧАТЫХ ПЕРЕДАЧАХ. Действие волновых зубчатых

Волновые механические передачи
Рис 6.1 Схемы образования передач
а — планетарной, б —
Волновые механические передачи
Рис 6.1 Схемы образования передач
а — планетарной, б —
Волновые механические передачи
Гибкость оболочки позволяет обеспечивать передачу движения с промежуточного колеса
Волновые механические передачи
Гибкость оболочки позволяет обеспечивать передачу движения с промежуточного колеса
Волновые механические передачи
Имеется много модификаций волновых передач, применяемых в станкостроении, подъемно-транспортном
Волновые механические передачи
Имеется много модификаций волновых передач, применяемых в станкостроении, подъемно-транспортном
Волновые механические передачи
Волновые механические передачи
Волновые механические передачи
На рис 6.2 представлена конструкция одноступенчатого волнового зубчатого редуктора,
Волновые механические передачи
На рис 6.2 представлена конструкция одноступенчатого волнового зубчатого редуктора,
Волновые механические передачи
В ступице днища имеются шлицы для соединения с выходным
Волновые механические передачи
В ступице днища имеются шлицы для соединения с выходным

Волновые механические передачи
Волновые механические передачи
Волновые механические передачи
КОНСТРУКЦИИ ОСНОВНЫХ ДЕТАЛЕЙ ВОЛНОВЫХ ПЕРЕДАЧ. МАТЕРИАЛЫ
Основные звенья передач. На
Волновые механические передачи
КОНСТРУКЦИИ ОСНОВНЫХ ДЕТАЛЕЙ ВОЛНОВЫХ ПЕРЕДАЧ. МАТЕРИАЛЫ
Основные звенья передач. На
Волновые механические передачи
В конструкции типа труба-стакан (рис. 6.3,б) гибкий цилиндр с
Волновые механические передачи
В конструкции типа труба-стакан (рис. 6.3,б) гибкий цилиндр с
Волновые механические передачи
Циклически изменяющиеся напряжения, возникающие в гибком колесе в процессе
Волновые механические передачи
Циклически изменяющиеся напряжения, возникающие в гибком колесе в процессе

Волновые механические передачи
Волновые механические передачи
Волновые механические передачи
На рис. 6.4, а жесткое колесо 7 установлено в
Волновые механические передачи
На рис. 6.4, а жесткое колесо 7 установлено в

Волновые механические передачи
Волновые механические передачи
Волновые механические передачи
Механические генераторы волновой деформации. Кулачковый генератор (рис. 6.5, а)
Волновые механические передачи
Механические генераторы волновой деформации. Кулачковый генератор (рис. 6.5, а)

Волновые механические передачи
Рис. 6.6. Схема соединения генератора волн с ведущим валом
Волновые механические передачи
Рис. 6.6. Схема соединения генератора волн с ведущим валом
Волновые механические передачи
У дисковых генераторов отсутствуют гибкие подшипники и профилированный кулачок,
Волновые механические передачи
У дисковых генераторов отсутствуют гибкие подшипники и профилированный кулачок,
Волновые механические передачи
Самоустанавливающееся соединение выполняют с помощью жестких шарниров или упругих
Волновые механические передачи
Самоустанавливающееся соединение выполняют с помощью жестких шарниров или упругих
Волновые механические передачи
Материалы основных деталей приведены в табл, 6.1. Гибкие колеса
Волновые механические передачи
Материалы основных деталей приведены в табл, 6.1. Гибкие колеса
Волновые механические передачи
Материалы и прочностные характеристики основных деталей
Волновые механические передачи
Материалы и прочностные характеристики основных деталей
Волновые механические передачи
РАСЧЕТ ВОЛНОВЫХ ПЕРЕДАЧ
Определение основных размеров и чисел зубьев
Волновые механические передачи
РАСЧЕТ ВОЛНОВЫХ ПЕРЕДАЧ
Определение основных размеров и чисел зубьев
Волновые механические передачи
При проектном расчете находят внутренний диаметр dm гибкого колеса
Волновые механические передачи
При проектном расчете находят внутренний диаметр dm гибкого колеса
Волновые механические передачи
Расчетный вращающий момент на гибком колесе
(6.2)
где Tg —
Волновые механические передачи
Расчетный вращающий момент на гибком колесе
(6.2)
где Tg —
Волновые механические передачи
Волновые механические передачи
Волновые механические передачи
Допустимое напряжение при кручении с реверсивной нагрузкой
(6.3)
Для нереверсивных передач
Волновые механические передачи
Допустимое напряжение при кручении с реверсивной нагрузкой
(6.3)
Для нереверсивных передач
Волновые механические передачи
Волновые механические передачи
Волновые механические передачи
При частоте вращения генератора nh, не равной 1000 об/мин,
Волновые механические передачи
При частоте вращения генератора nh, не равной 1000 об/мин,
Волновые механические передачи
Внутренний диаметр гибкого колеса
(6.5)
где
— толщина стенки гибкого колеса
Волновые механические передачи
Внутренний диаметр гибкого колеса
(6.5)
где
— толщина стенки гибкого колеса
Волновые механические передачи
Если проектируют передачу с кулачковым генератором и гибким подшипником,
Волновые механические передачи
Если проектируют передачу с кулачковым генератором и гибким подшипником,
Волновые механические передачи
Диаметр окружности впадин зубчатого венца гибкого колеса
(6.6)
Модуль зацепления
(6.7)
Волновые механические передачи
Диаметр окружности впадин зубчатого венца гибкого колеса
(6.6)
Модуль зацепления
(6.7)
Волновые механические передачи
Подученное значение m согласуют со стандартными по ГОСТ 9563,
Первый
Волновые механические передачи
Подученное значение m согласуют со стандартными по ГОСТ 9563,
Первый
Волновые механические передачи
. Передаточное отношение от генератора h к гибкому колесу
Волновые механические передачи
. Передаточное отношение от генератора h к гибкому колесу

Волновые механические передачи
Рис. 6.7 Схемы деформации гибкого колеса
Волновые механические передачи
Рис. 6.7 Схемы деформации гибкого колеса
Волновые механические передачи
Рациональная схема деформации гибкого колеса кулачковым генератором представлена на
Волновые механические передачи
Рациональная схема деформации гибкого колеса кулачковым генератором представлена на
Волновые механические передачи
(6.10)
или
где Dд — диаметр диска; ед —
Волновые механические передачи
(6.10)
или
где Dд — диаметр диска; ед —
Волновые механические передачи
Основные параметры волновых зубчатых одноступенчатых редукторов (ГОСТ 23108-78)
Волновые механические передачи
Основные параметры волновых зубчатых одноступенчатых редукторов (ГОСТ 23108-78)
Волновые механические передачи
Волновые механические передачи
Волновые механические передачи
Примечание КПД волновых редукторов должен соответствовать следующим значениям.
Волновые механические передачи
Примечание КПД волновых редукторов должен соответствовать следующим значениям.
Волновые механические передачи
Радиальная нагрузка в дисковом генераторе волн воспринимается только одним
Волновые механические передачи
Радиальная нагрузка в дисковом генераторе волн воспринимается только одним
Волновые механические передачи
Долговечность гибкого подшипника резко снижается, если вследствие чрезмерного натяга
Волновые механические передачи
Долговечность гибкого подшипника резко снижается, если вследствие чрезмерного натяга
Волновые механические передачи
Проверочный расчет зацепления на прочность проводят по условию
(6.36)
ψb
Волновые механические передачи
Проверочный расчет зацепления на прочность проводят по условию
(6.36)
ψb
Волновые механические передачи
Проверочный расчет гибкого колеса на сопротивление усталости проводят по
Волновые механические передачи
Проверочный расчет гибкого колеса на сопротивление усталости проводят по
Волновые механические передачи
В формулах (6 37) и (6.38): E — модуль
Волновые механические передачи
В формулах (6 37) и (6.38): E — модуль
Волновые механические передачи
Волновые механические передачи
Волновые механические передачи
Y— коэффициент, учитывающий влияние зубчатого венца на прочность гибкого
Волновые механические передачи
Y— коэффициент, учитывающий влияние зубчатого венца на прочность гибкого
Волновые механические передачи
Толщина зуба у основания
(6.40)
где;
− значения эвольвентных углов
Волновые механические передачи
Толщина зуба у основания
(6.40)
где;
− значения эвольвентных углов
Волновые механические передачи
Коэффициенты запаса прочности; по напряжениям изгиба
(6.41)
Волновые механические передачи
Коэффициенты запаса прочности; по напряжениям изгиба
(6.41)
Волновые механические передачи
по напряжениям кручения
(6.42)
Волновые механические передачи
по напряжениям кручения
(6.42)
Волновые механические передачи
общий
(6.43)
Волновые механические передачи
общий
(6.43)
Волновые механические передачи
Приближенные эмпирические зависимости пределов выносливости для случаев нагружения с
Волновые механические передачи
Приближенные эмпирические зависимости пределов выносливости для случаев нагружения с
Волновые механические передачи
КПД, смазывание и тепловой режим. Потери мощности в волновых
Волновые механические передачи
КПД, смазывание и тепловой режим. Потери мощности в волновых
Волновые механические передачи
Поэтому КПД волновых передач принято определять эспериментально; на стадии
Волновые механические передачи
Поэтому КПД волновых передач принято определять эспериментально; на стадии
Волновые механические передачи
Для смазывания редукторов общего назначения рекомендуется индустриальное масло типа
Волновые механические передачи
Для смазывания редукторов общего назначения рекомендуется индустриальное масло типа
Волновые механические передачи
Тепловой режим волновой передачи можно определить по уравнению теплового
Волновые механические передачи
Тепловой режим волновой передачи можно определить по уравнению теплового
Волновые механические передачи
Под А понимают только ту часть площади наружной поверхности
Волновые механические передачи
Под А понимают только ту часть площади наружной поверхности
 Engineering Mechanics Part II: Dynamics. Lectures 1 - 3
Engineering Mechanics Part II: Dynamics. Lectures 1 - 3 Теплоизоляция теплообменных аппаратов
Теплоизоляция теплообменных аппаратов Конденсаторы. Виды конденсаторов
Конденсаторы. Виды конденсаторов презентация к уроку физики 11 класс
презентация к уроку физики 11 класс Сверхпроводимость. (Лекция 10)
Сверхпроводимость. (Лекция 10) Механика сплошных сред. Введение в гидродинамику
Механика сплошных сред. Введение в гидродинамику Элементарные частицы
Элементарные частицы Новые технологические процессы
Новые технологические процессы модели атомов
модели атомов презентация и методическое описание к уроку Звук
презентация и методическое описание к уроку Звук Английский язык в механике
Английский язык в механике Учение о свете - оптика
Учение о свете - оптика Математическое моделирование авиационных двигателей
Математическое моделирование авиационных двигателей Эксперимент – как метод активизации мыслительной деятельности учащихся на уроках физики
Эксперимент – как метод активизации мыслительной деятельности учащихся на уроках физики Урок узагальнення та систематизації знань з теми Теплові явища. Розв’язування задач. 8 клас
Урок узагальнення та систематизації знань з теми Теплові явища. Розв’язування задач. 8 клас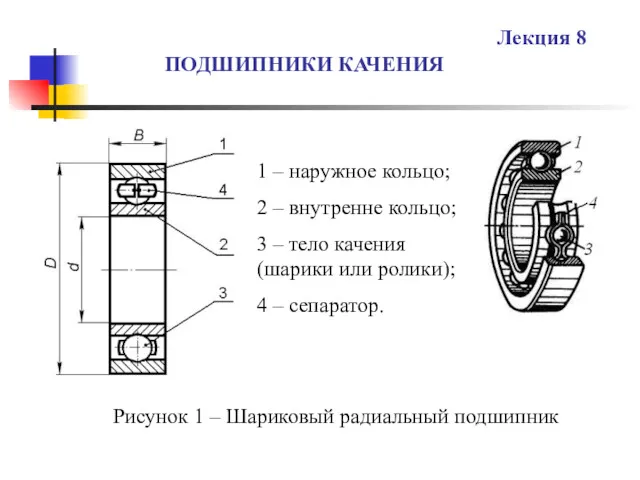 Подшипники качения. (Лекция 8)
Подшипники качения. (Лекция 8) Электрооборудование автомобилей. Система зажигания. (Урок 5)
Электрооборудование автомобилей. Система зажигания. (Урок 5) Преимущества и недостатки использования оптических волокон в системах связи
Преимущества и недостатки использования оптических волокон в системах связи Функциональная полупроводниковая электроника. Динамические неоднородности. Домен Ганна. УФЭ (4)
Функциональная полупроводниковая электроника. Динамические неоднородности. Домен Ганна. УФЭ (4) 7 класс. Презентация по физике на тему Простые механизмы. Условие равновесия рычага
7 класс. Презентация по физике на тему Простые механизмы. Условие равновесия рычага Гидромеханика центробежного насоса и центробежно-вихревого насоса
Гидромеханика центробежного насоса и центробежно-вихревого насоса Устройство скутера
Устройство скутера Резание металла и проволоки слесарной ножовкой
Резание металла и проволоки слесарной ножовкой Повторительно - обобщающий урок по теме: Архимедова сила. Плавание. Воздухоплавание.
Повторительно - обобщающий урок по теме: Архимедова сила. Плавание. Воздухоплавание. Презентация по теме Реостаты
Презентация по теме Реостаты Сложение сил. Равнодействующая сил
Сложение сил. Равнодействующая сил Электромагнитные поля (ЭМП). Лекция № 6
Электромагнитные поля (ЭМП). Лекция № 6 Приемники излучения
Приемники излучения