опорах действуют в той же плоскости, и в этом случае модели реальных опор считаем плоскими: шарнирно-подвижной опорой и жесткой заделкой. На рисунке показана возможная расчетная модель манипулятора для расчета на прочности и жесткости.
Интенсивность распределенной нагрузки qi моделирует собственный вес i-го стержня:
qi = γi*Fi*g,
где γi – плотность материала стержня (кг/м3), Fi – площадь поперечного сечения (м2), g – ускорение свободного падения (м/с2). Сосредоточенная сила Р моделирует вес переносимого груза, который удерживает захватное устройство. Если центр тяжести груза оказывается смещенным относительно центра тяжести захватного устройства, то кроме силы Р, на последнее звено будет действовать пара сил, которую необходимо учесть в расчетах.
В результате расчета определяются неизвестные реакции и усилия и затем находятся внутренние усилия в сечениях каждого стержня.

 Судовые устройства и системы
Судовые устройства и системы Рівновага тіл. Умова рівноваги тіла
Рівновага тіл. Умова рівноваги тіла Работа электрического поля. 10 класс
Работа электрического поля. 10 класс Введение в динамику системы. Масса. Центр масс. Моменты инерции
Введение в динамику системы. Масса. Центр масс. Моменты инерции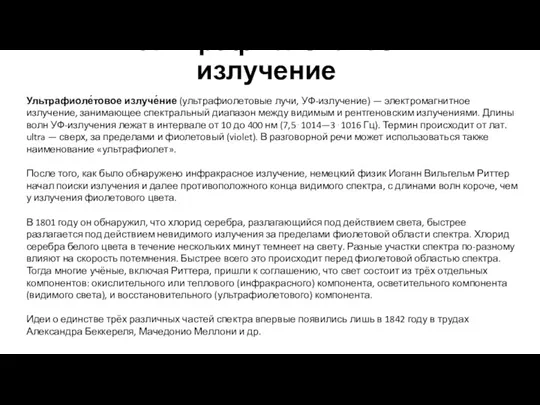 Ультрафиолетовое излучение
Ультрафиолетовое излучение Физические головоломки
Физические головоломки Нейтронная физика. Открытие нейтрона
Нейтронная физика. Открытие нейтрона Лампы накаливания. Электронагревательные приборы
Лампы накаливания. Электронагревательные приборы Диэлектрические потери и диэлектрическая спектроскопия
Диэлектрические потери и диэлектрическая спектроскопия Гидравлические сопротивления и потери энергии
Гидравлические сопротивления и потери энергии Определение остойчивости
Определение остойчивости Решите задачи
Решите задачи Методи розрахунку електричних кіл постійного струму
Методи розрахунку електричних кіл постійного струму Кинематический анализ механизмов
Кинематический анализ механизмов Измерение атмосферного давления. Опыт Торричелли. Барометр-анероид
Измерение атмосферного давления. Опыт Торричелли. Барометр-анероид Движение тела под действием силы тяжести
Движение тела под действием силы тяжести Тиристор деп төрт деңгейлі жартылай өткізгіш құрылғылардын
Тиристор деп төрт деңгейлі жартылай өткізгіш құрылғылардын Правило буравчика. Правило правой и левой руки. (Урок 41)
Правило буравчика. Правило правой и левой руки. (Урок 41) The Hydrostatic Pressure. Pascal's principle. Communicating vessels. Hydraulic рress
The Hydrostatic Pressure. Pascal's principle. Communicating vessels. Hydraulic рress Нелинейные электрические цепи
Нелинейные электрические цепи Текстиль материалдарың колорлауда нанотехнологияның жетісіктері
Текстиль материалдарың колорлауда нанотехнологияның жетісіктері Движение тела под действием силы трения
Движение тела под действием силы трения Вещества и явления в окружающем мире
Вещества и явления в окружающем мире Ремонт стиральных машин (СМА). Программа обучения 1
Ремонт стиральных машин (СМА). Программа обучения 1 Автобусы. EDC PDE S6
Автобусы. EDC PDE S6 Биологические мембраны. Биоэлектрогенез
Биологические мембраны. Биоэлектрогенез Оценивание закономерностей окислительного изнашивания
Оценивание закономерностей окислительного изнашивания Электрический ток в различных средах
Электрический ток в различных средах