- Курс лекций по теоретической механике. Динамика (II часть)

Содержание
- 2. Содержание Лекция 6. Работа, мощность силы. Кинетическая энергия. Теоремы об изменении кинетической энергии для материальной точки
- 3. Лекция 6 Работа, мощность силы. Кинетическая и потенциальная энергия – механическое движение в результате взаимодействия механических
- 4. Лекция 6 (продолжение – 6.2) Можно доказать следующие теоремы и утверждения: Работа равнодействующей на некотором перемещении
- 5. Лекция 6 (продолжение – 6.3) Кинетическая энергия – характеризует способность механического движения превращаться в эквивалентное количество
- 6. Лекция 6 (продолжение – 6.4) Задача 1 на применение теоремы об изменении кинетической энергии для материальной
- 7. Задача 2 на применение теоремы об изменении кинетической энергии для системы – Массивный бумажный рулон радиуса
- 8. Динамика поступательного и вращательного движений твердого тела – рассмотренные теоремы динамики системы дают дифференциальные уравнения, описывающие
- 9. Динамика плоского движения твердого тела – Плоское движение может быть представлено как совокупность поступательного движения тела
- 10. Лекция 6 (продолжение – 6.8) Задача 2: Груз весом G подвешен на тросе длиной l и
- 12. Скачать презентацию
Содержание
Лекция 6. Работа, мощность силы. Кинетическая энергия. Теоремы об изменении кинетической
Содержание
Лекция 6. Работа, мощность силы. Кинетическая энергия. Теоремы об изменении кинетической
Лекция 6
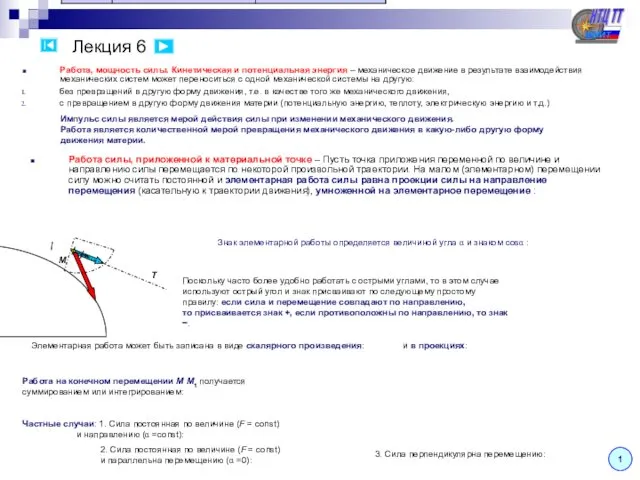
Работа, мощность силы. Кинетическая и потенциальная энергия – механическое движение
Лекция 6
Работа, мощность силы. Кинетическая и потенциальная энергия – механическое движение
Лекция 6 (продолжение – 6.2)
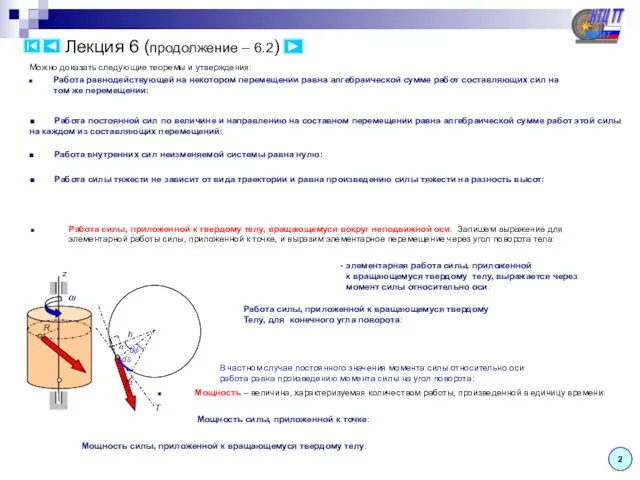
Можно доказать следующие теоремы и утверждения:
Работа равнодействующей
Лекция 6 (продолжение – 6.2)
Можно доказать следующие теоремы и утверждения:
Работа равнодействующей
Лекция 6 (продолжение – 6.3)
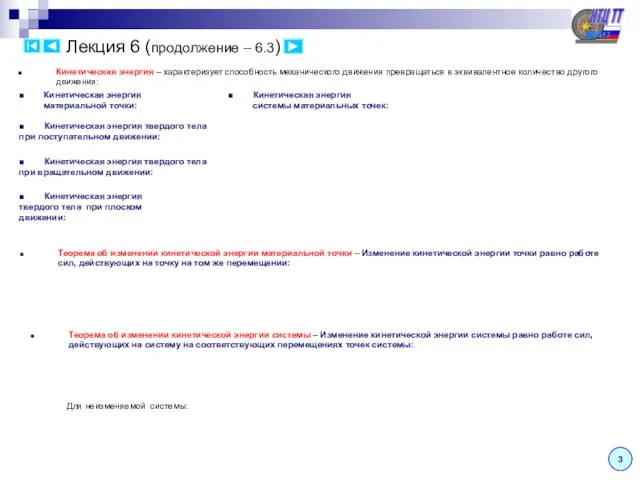
Кинетическая энергия – характеризует способность механического движения
Лекция 6 (продолжение – 6.3)
Кинетическая энергия – характеризует способность механического движения
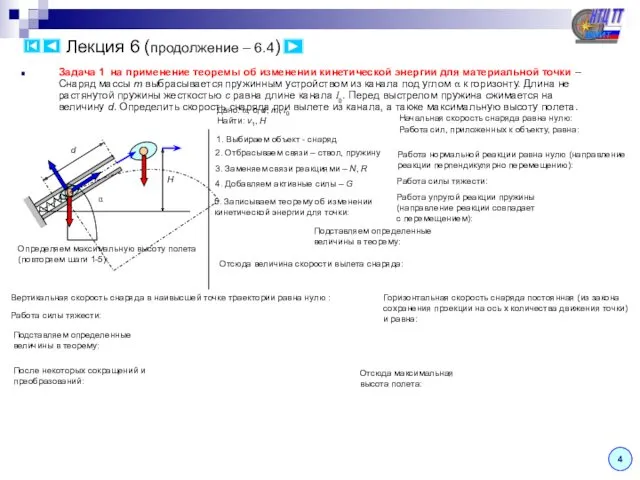
Лекция 6 (продолжение – 6.4)
Задача 1 на применение теоремы об изменении
Лекция 6 (продолжение – 6.4)
Задача 1 на применение теоремы об изменении
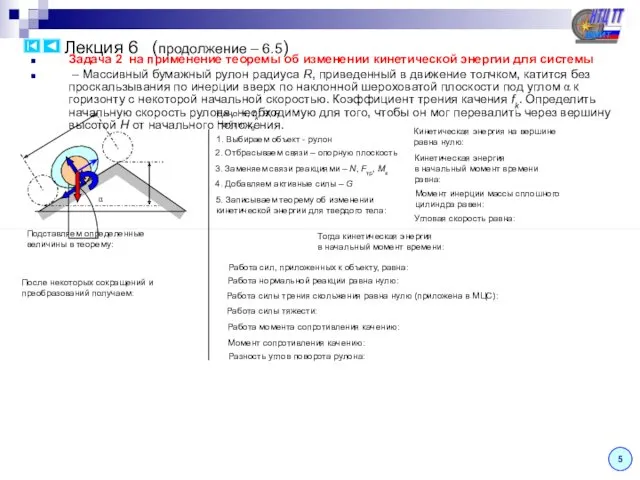
Задача 2 на применение теоремы об изменении кинетической энергии для системы
Задача 2 на применение теоремы об изменении кинетической энергии для системы
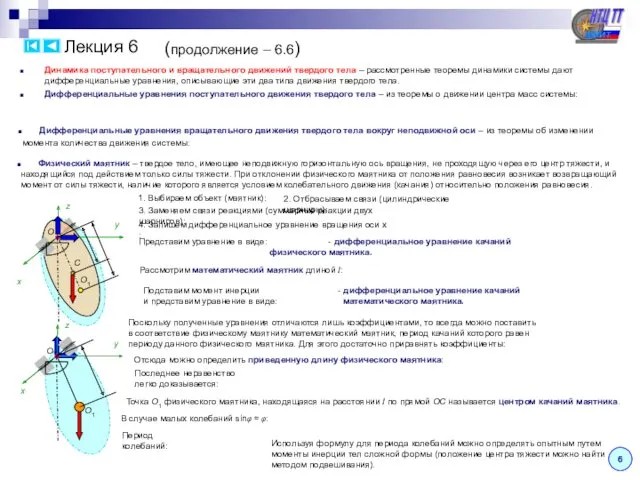
Динамика поступательного и вращательного движений твердого тела – рассмотренные теоремы динамики
Динамика поступательного и вращательного движений твердого тела – рассмотренные теоремы динамики
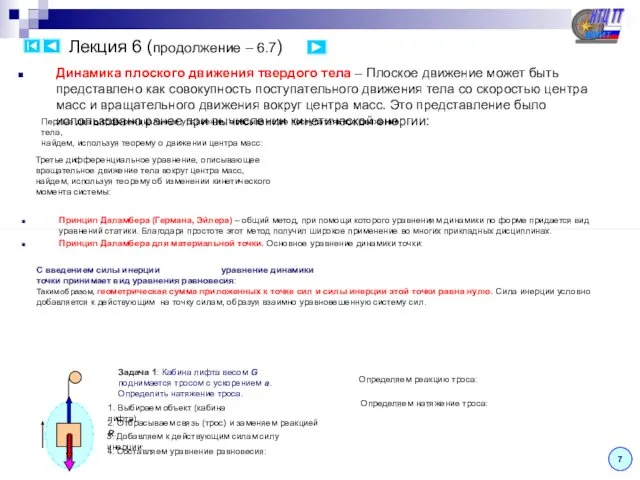
Динамика плоского движения твердого тела – Плоское движение может быть представлено
Динамика плоского движения твердого тела – Плоское движение может быть представлено
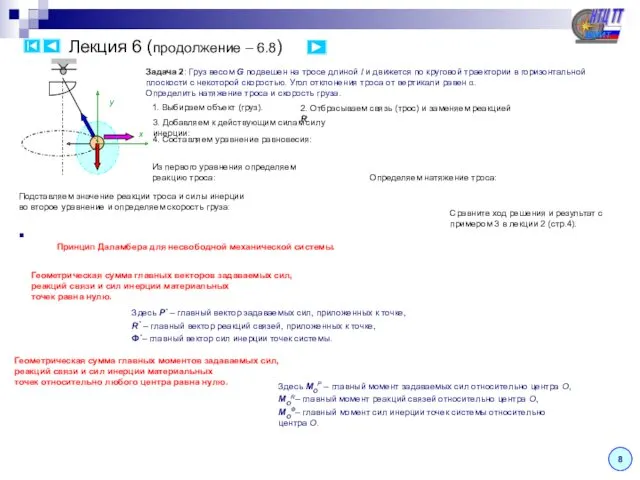
Лекция 6 (продолжение – 6.8)
Задача 2: Груз весом G подвешен на
Лекция 6 (продолжение – 6.8)
Задача 2: Груз весом G подвешен на
 Электрический ток в полупроводниках
Электрический ток в полупроводниках Изменение агрегатных состояний вещества
Изменение агрегатных состояний вещества Механические волны
Механические волны Презентация Проектное обучение
Презентация Проектное обучение Презентация урока физики в 11 классе по теме Явление электромагнитной индукции .Магнитный поток. Правило Ленца. Закон электромагнитной индукции Диск
Презентация урока физики в 11 классе по теме Явление электромагнитной индукции .Магнитный поток. Правило Ленца. Закон электромагнитной индукции Диск Электрический ток в газах
Электрический ток в газах Презентация к уроку Реактивные двигатели
Презентация к уроку Реактивные двигатели Development of a high performance optical cesium beam clock for ground applications
Development of a high performance optical cesium beam clock for ground applications Энергия. Закон сохранения энергии
Энергия. Закон сохранения энергии Электрический ток в различных средах
Электрический ток в различных средах Презентация по теме Механические колебания
Презентация по теме Механические колебания Тепловое движение. Температура
Тепловое движение. Температура Godfrin Cryocoolers
Godfrin Cryocoolers Защита населения и объектов от чрезвычайных ситуаций. Радиационная безопасность
Защита населения и объектов от чрезвычайных ситуаций. Радиационная безопасность игра по физике для учащихся 8 классов Физическое лото
игра по физике для учащихся 8 классов Физическое лото Атомның күрделі құрылысын айғақтайтын құбылыстар
Атомның күрделі құрылысын айғақтайтын құбылыстар Реальные газы. Тема 11
Реальные газы. Тема 11 Лекция № 9. Механические волны
Лекция № 9. Механические волны Від рівноважного випромінювання до лазера
Від рівноважного випромінювання до лазера Механічна робота. Одиниці роботи. Потужність
Механічна робота. Одиниці роботи. Потужність Презентация по физике (7 класс) по теме Механическое движение (урок - решение задач)
Презентация по физике (7 класс) по теме Механическое движение (урок - решение задач) Конструкция автомобиля. Коробка передач. Назначение и типы. Общее устройство и принцип работы
Конструкция автомобиля. Коробка передач. Назначение и типы. Общее устройство и принцип работы Итоговый урок физики. 8 класс
Итоговый урок физики. 8 класс Primary Batteries. The zinc-carbon cell
Primary Batteries. The zinc-carbon cell модели атомов
модели атомов Кремниевые подложки интегральных схем
Кремниевые подложки интегральных схем Тест по теме Элементарные частицы 11 класс
Тест по теме Элементарные частицы 11 класс Атомно-силовой микроскоп в составе школьного инженерного класса: практическое применение АСМ Compact компании PHYWE
Атомно-силовой микроскоп в составе школьного инженерного класса: практическое применение АСМ Compact компании PHYWE