- Лекция 9. Расчет пространственных систем

Содержание
- 2. Все сооружения являются пространственными, и на них действуют нагрузки, лежащие в разных плоскостях. Поэтому и расчетные
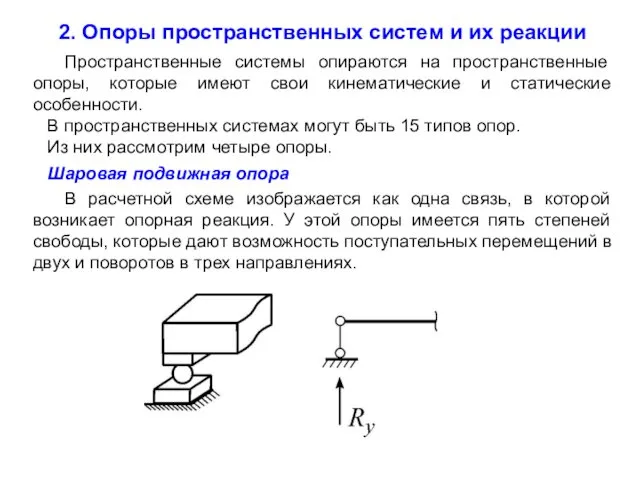
- 3. 2. Опоры пространственных систем и их реакции Пространственные системы опираются на пространственные опоры, которые имеют свои
- 4. Шаровая неподвижная опора В расчетной схеме изображается в виде трех связей с тремя реакциями. У этой
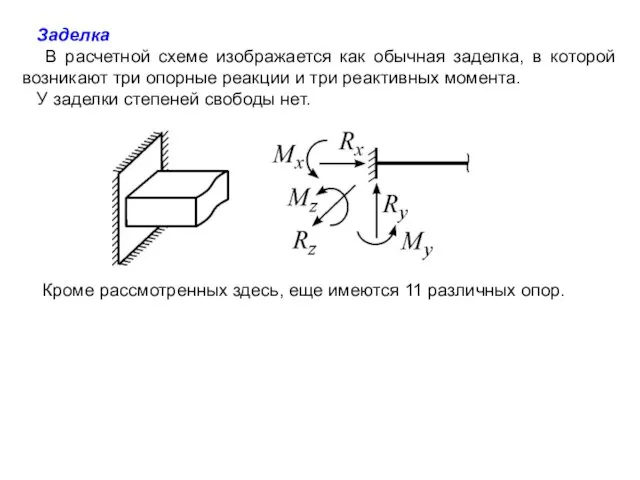
- 5. Заделка В расчетной схеме изображается как обычная заделка, в которой возникают три опорные реакции и три
- 6. Реакции статически определимых пространственных систем определяются из шести уравнений равновесия. Имеется четыре варианта записи уравнений равновесия.
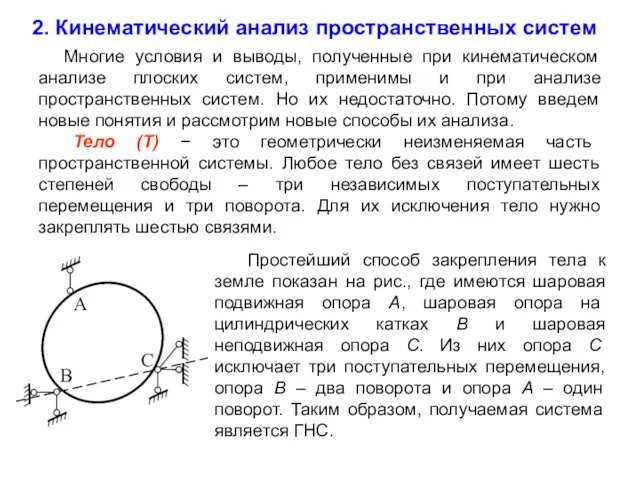
- 7. 2. Кинематический анализ пространственных систем Многие условия и выводы, полученные при кинематическом анализе плоских систем, применимы
- 8. Связи, соединяющие два тела, могут быть различными. Простейшая связь в виде стержня С имеет вид: Если
- 9. Если в пространственной системе имеется nТ тел, nШ шаровых шарниров, nC стержней, опорных связей и nП
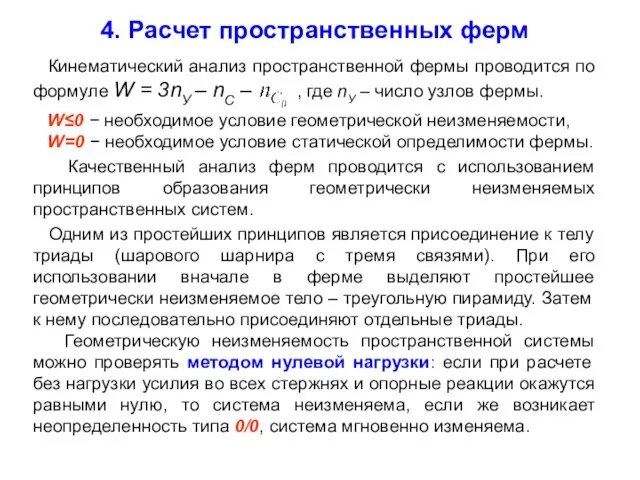
- 10. 4. Расчет пространственных ферм Кинематический анализ пространственной фермы проводится по формуле W = 3nУ – nC
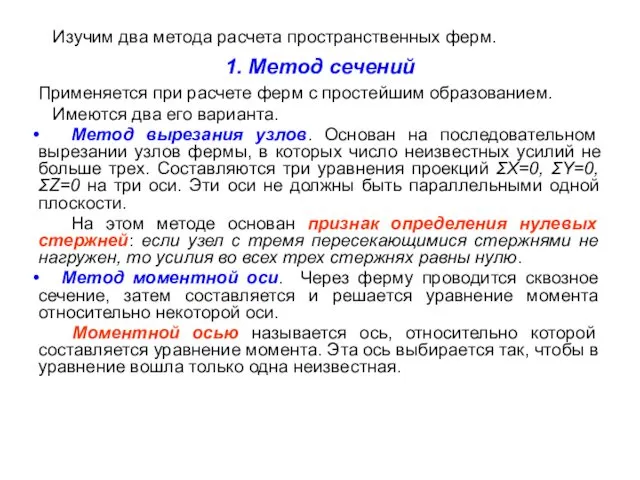
- 11. Изучим два метода расчета пространственных ферм. 1. Метод сечений Применяется при расчете ферм с простейшим образованием.
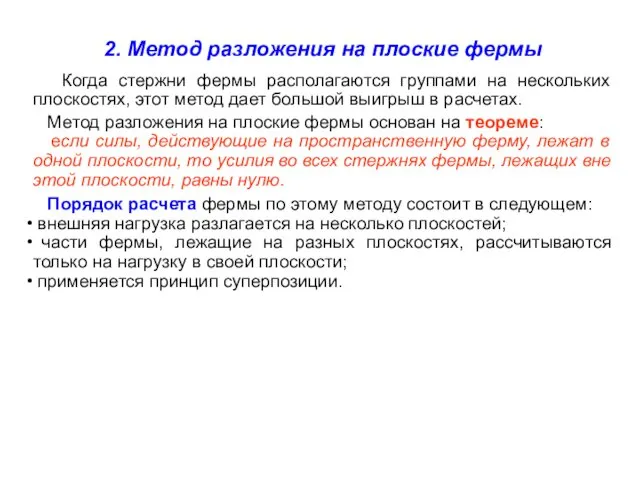
- 12. 2. Метод разложения на плоские фермы Когда стержни фермы располагаются группами на нескольких плоскостях, этот метод
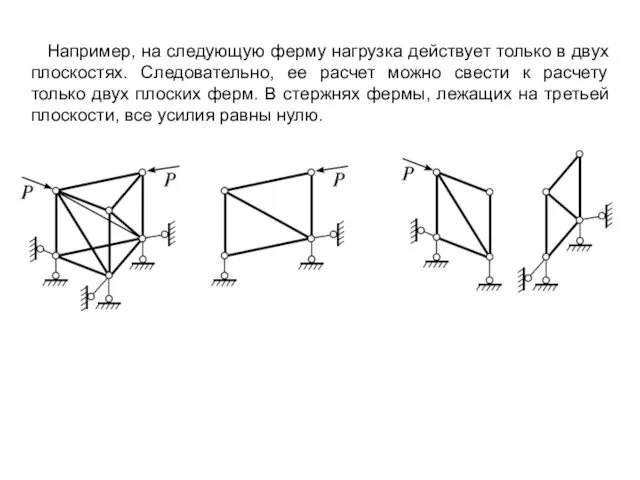
- 13. Например, на следующую ферму нагрузка действует только в двух плоскостях. Следовательно, ее расчет можно свести к
- 14. В пространственных стержневых системах в общем случае могут возникать шесть внутренних усилий. Поэтому формула вычисления перемещений
- 16. Скачать презентацию
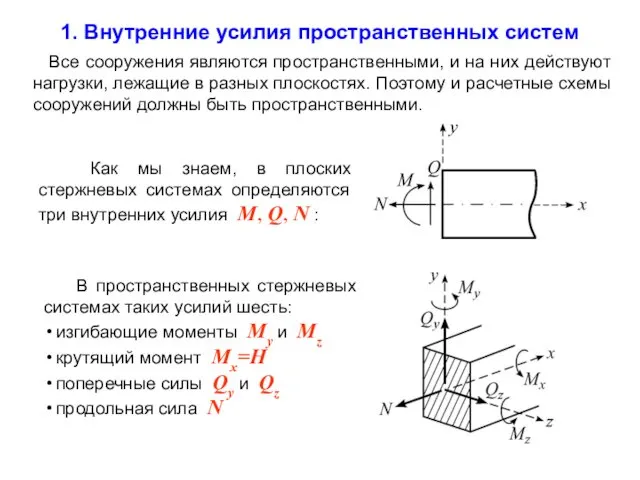
Все сооружения являются пространственными, и на них действуют нагрузки, лежащие
Все сооружения являются пространственными, и на них действуют нагрузки, лежащие
2. Опоры пространственных систем и их реакции
Пространственные системы опираются на
2. Опоры пространственных систем и их реакции
Пространственные системы опираются на
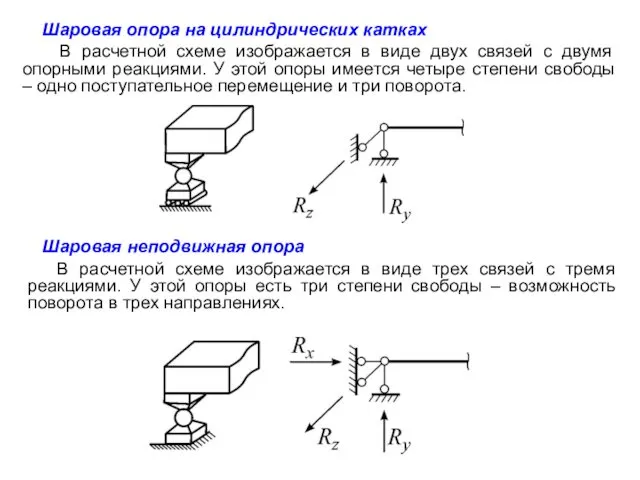
Шаровая неподвижная опора
В расчетной схеме изображается в виде трех
Шаровая неподвижная опора
В расчетной схеме изображается в виде трех
Заделка
В расчетной схеме изображается как обычная заделка, в
Заделка
В расчетной схеме изображается как обычная заделка, в
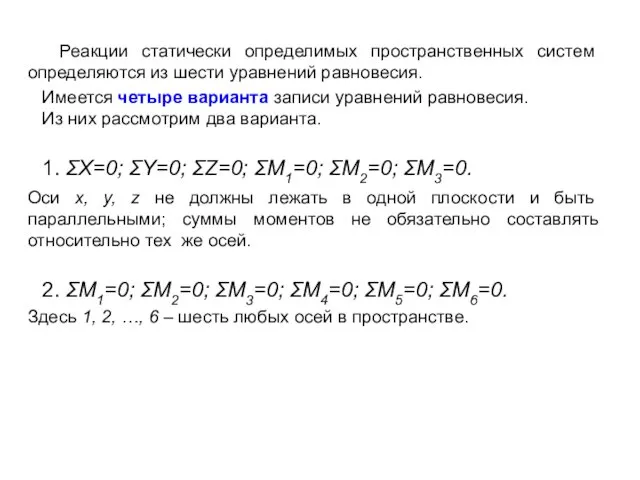
Реакции статически определимых пространственных систем определяются из шести уравнений равновесия.
Реакции статически определимых пространственных систем определяются из шести уравнений равновесия.
2. Кинематический анализ пространственных систем
Многие условия и выводы,
2. Кинематический анализ пространственных систем
Многие условия и выводы,
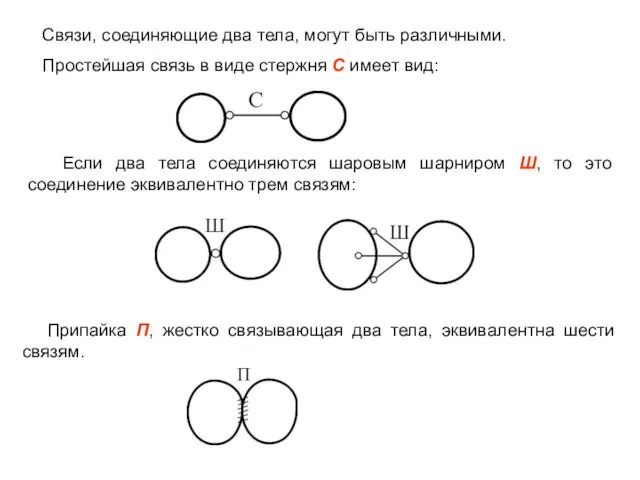
Связи, соединяющие два тела, могут быть различными.
Простейшая связь
Связи, соединяющие два тела, могут быть различными.
Простейшая связь
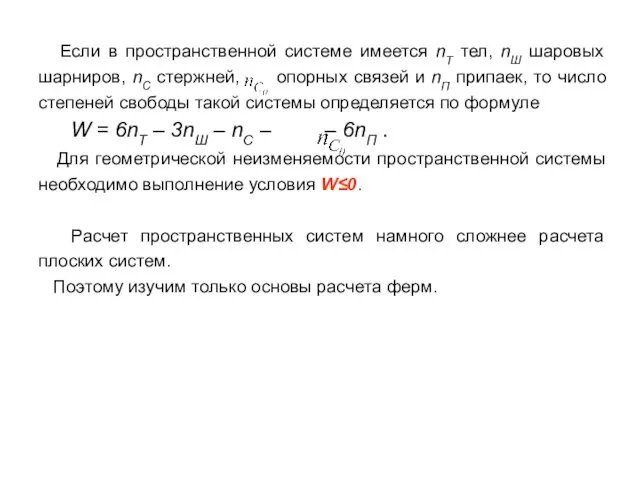
Если в пространственной системе имеется nТ тел, nШ шаровых шарниров,
Если в пространственной системе имеется nТ тел, nШ шаровых шарниров,
4. Расчет пространственных ферм
Кинематический анализ пространственной фермы проводится
4. Расчет пространственных ферм
Кинематический анализ пространственной фермы проводится
Изучим два метода расчета пространственных ферм.
1. Метод сечений
Применяется при
Изучим два метода расчета пространственных ферм.
1. Метод сечений
Применяется при
2. Метод разложения на плоские фермы
Когда стержни фермы располагаются группами
2. Метод разложения на плоские фермы
Когда стержни фермы располагаются группами
Например, на следующую ферму нагрузка действует только в двух плоскостях.
Например, на следующую ферму нагрузка действует только в двух плоскостях.
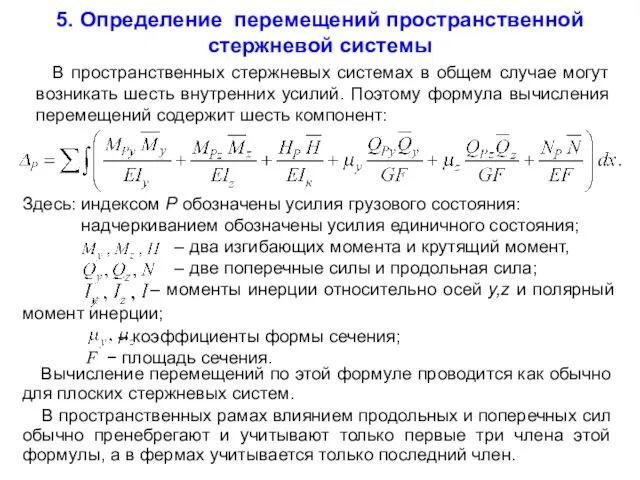
В пространственных стержневых системах в общем случае могут возникать шесть
В пространственных стержневых системах в общем случае могут возникать шесть
 Механизм, автомат, робот
Механизм, автомат, робот Законы Ньютона. 10 класс
Законы Ньютона. 10 класс Единство колебательных процессов различной физической природы
Единство колебательных процессов различной физической природы Сложение и разложение сил. Равновесие сходящейся системы сил
Сложение и разложение сил. Равновесие сходящейся системы сил Высокоточные системы навигации. Лекция № 3.1
Высокоточные системы навигации. Лекция № 3.1 Закони динаміки. Сили та види взаємодій
Закони динаміки. Сили та види взаємодій Предмет физики и её связь с другими науками
Предмет физики и её связь с другими науками Естественное и искусственное освещение. Лекция 5
Естественное и искусственное освещение. Лекция 5 Гидравлический подъемник. Выбор насоса
Гидравлический подъемник. Выбор насоса Отчет о прохождении производственной практики (по профилю специальности)
Отчет о прохождении производственной практики (по профилю специальности) Миға шабуыл. Кванттық физика. Жылулық сәулелену
Миға шабуыл. Кванттық физика. Жылулық сәулелену Наземное лазерное сканирование
Наземное лазерное сканирование Раздел 2. Термодинамика поверхностных явлений
Раздел 2. Термодинамика поверхностных явлений Механические напряжения и деформации в тонких пленках
Механические напряжения и деформации в тонких пленках Техническое обслуживание аккумуляторов и батарей. Современные технологии
Техническое обслуживание аккумуляторов и батарей. Современные технологии Дослід Торрічеллі
Дослід Торрічеллі Історія розвитку авіації
Історія розвитку авіації Физический биатлон на тему Атмосферное давление
Физический биатлон на тему Атмосферное давление Силы всемирного тяготения
Силы всемирного тяготения Акустика. Ультразвук
Акустика. Ультразвук Выпрямление тока. Вольт-амперная характеристика диода
Выпрямление тока. Вольт-амперная характеристика диода Статика. Основные понятия и определения
Статика. Основные понятия и определения Механические волны
Механические волны Отчет о прохождении производственной практики (по профилю специальности)
Отчет о прохождении производственной практики (по профилю специальности) Строение газообразных, жидких и твердых тел.
Строение газообразных, жидких и твердых тел. Основные положения молекулярно-кинетической теории
Основные положения молекулярно-кинетической теории Охота за полярными сияниями
Охота за полярными сияниями Закон всемирного тяготения. Решение задач
Закон всемирного тяготения. Решение задач