- Механика привода

Содержание
- 3. Л.2 Механика привода Редуктор коэффициент редукции РЗП радиус приведения [ М] Шатунно-кривошипный механизм
- 4. Характеристики типовых упругих элементов
- 5. Вал, работающий на кручение характеризуется углом закручивания Коэффициент жесткости определяется отношением
- 6. Растягиваемый или сжимаемый стержень, к которому приложена сила F, имеет следующее значение жесткости (ньютон на метр)
- 8. Ременные и цепные передачи Если жесткость ремня или цепи на растяжение , то при повороте ведомого
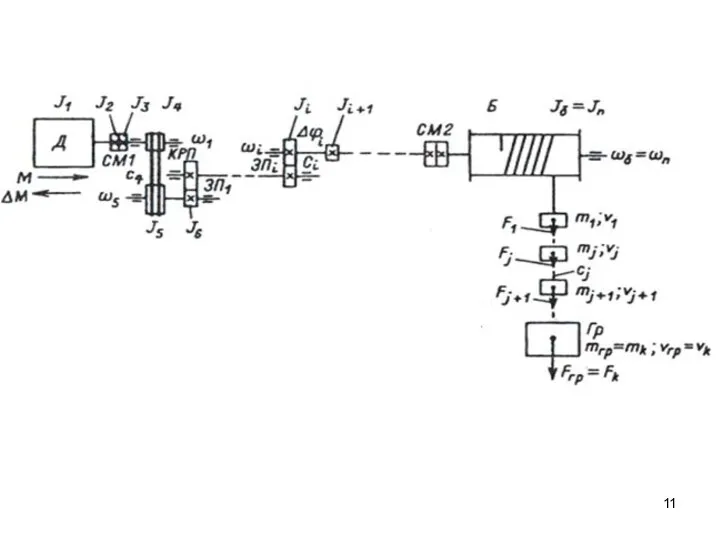
- 10. Непосредственное представление о движущихся массах установки и механических связях между ними дает кинематическая схема электропривода. Конкретные
- 12. Массы элементов и жесткости элементарных связей в кинематической цепи привода различны. Определяющее влияние на движение системы
- 13. Для сведения любой реальной системы к простейшей модели нужно выполнить ряд операций, называемых приведением моментов и
- 14. Условием соответствия приведенной расчетной схемы реальной механической системе является выполнение закона сохранения энергии. При приведении необходимо
- 15. При приведении вращательных и поступательных перемещений необходимо учитывать, что передаточное число и радиус приведения определяются соотношением
- 16. Приведение моментов и сил нагрузки элементов кинематической цепи должно осуществляться на основании условия равенства элементарной работы
- 17. Учет потерь в механической части привода при прямом направлении передачи энергии и последовательном соединении нескольких звеньев
- 18. При приведении момента инерции элемента системы, движущегося вращательно со скоростью или массы, поступательно движущейся со скоростью
- 19. При приведении жесткостей механических связей должно выполняться условие равенства запаса потенциальной энергии деформации упругих элементов. Формулы
- 20. Расчетные схемы механической части электропривода После приведения всех величин к расчетной скорости представляется возможным осуществить выбор
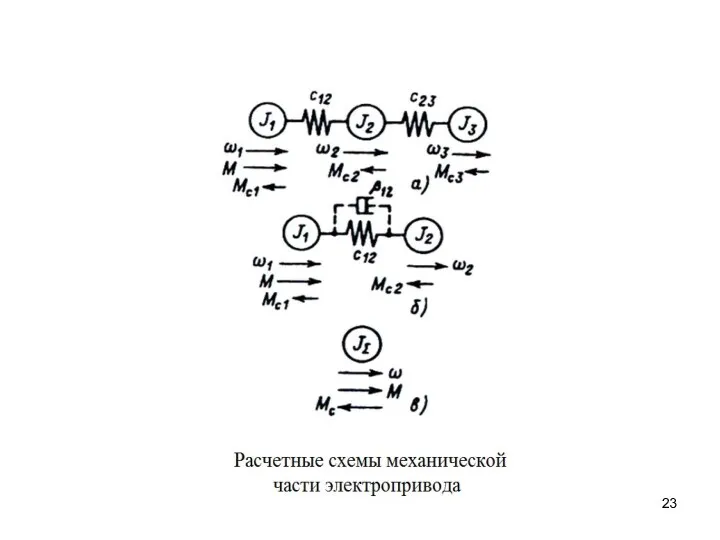
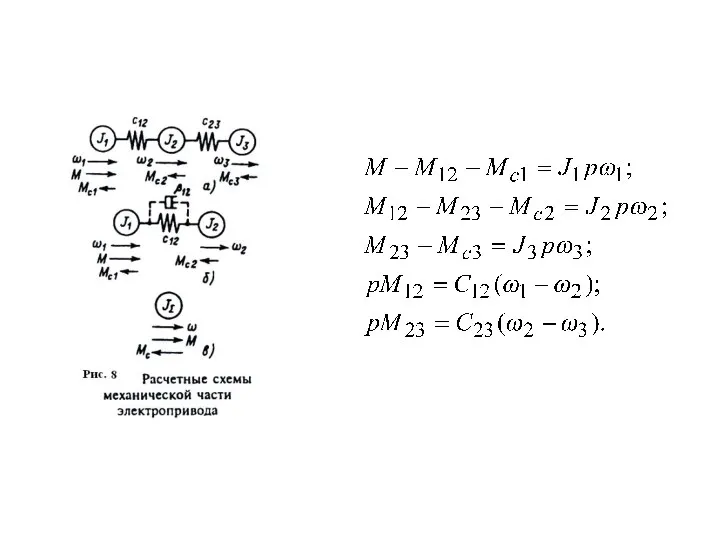
- 21. Расчетные схемы механической части электропривода 2 Для примера в ней выделены три наиболее значительные массы —
- 22. Расчетные схемы механической части электропривода В большинстве практических случаев в результате выделения главных масс и жесткостей
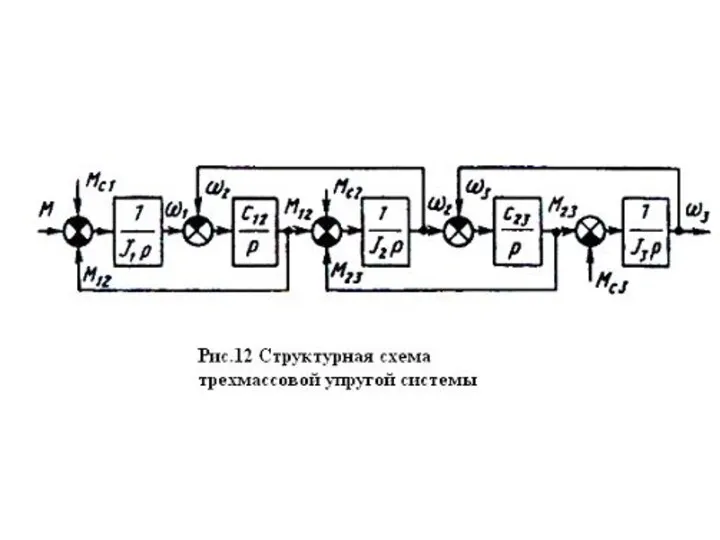
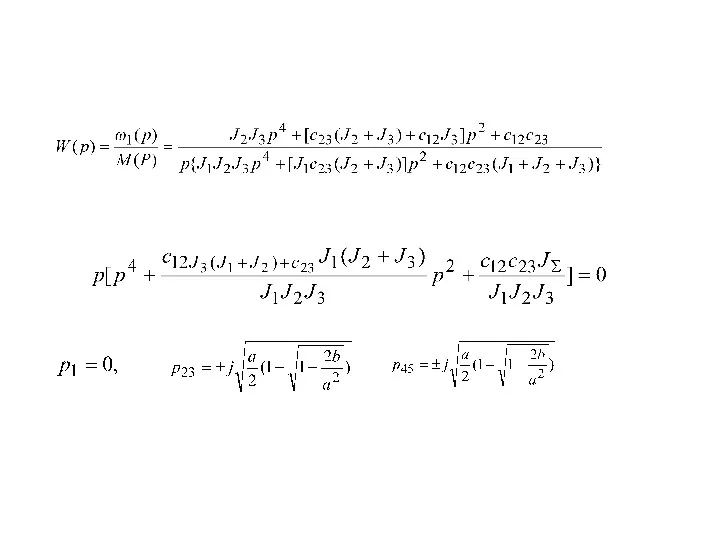
- 24. Трехмассовая упругая система при исследовании электромеханических систем автоматизированного электропривода используется в тех случаях, когда возникает необходимость
- 25. Для исследования отдельных физических особенностей трехмассовая расчетная схема часто сводится к двухмассовой. В обобщенной двухмассовой упругой
- 26. Электромеханическая система с двухмассовой упругой механической частью представляет собой простейшую модель электропривода, наиболее удобную для изучения
- 27. В тех случаях когда влияние упругих связей незначительно, или (при решении некоторых задач) с этим влиянием
- 28. Для одномассовой расчетной схемы суммарный приведенный момент инерции электропривода может быть выражен общей формулой Суммарный приведенный
- 29. Самоторможение механических передач
- 34. резонансная частота второй массы при жестком закреплении первой резонансная частота системы
- 36. Обратим внимание на различия во влиянии упругости на движение первой и второй масс. Движение первой массы
- 37. При приближении частоты колебаний момента к резонансной амплитуды колебаний скорости возрастают и при стремятся к бесконечности.
- 38. Если механизм обладает небольшой инерцией (J2 много меньше чем J1) то движение первой массы близко к
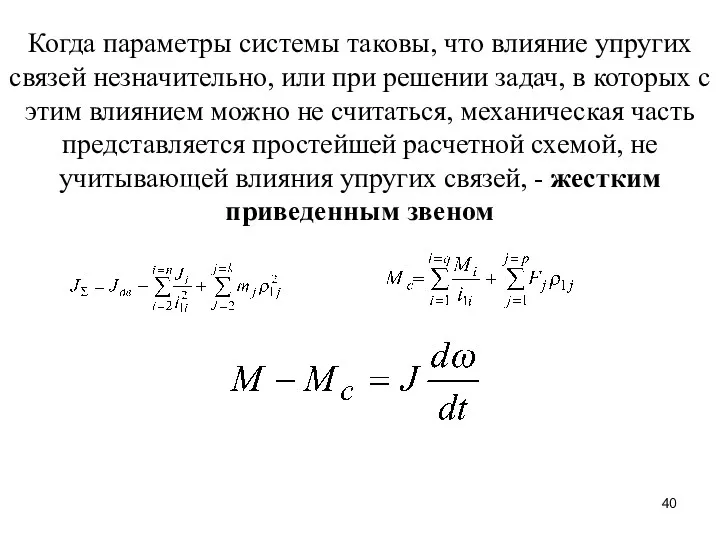
- 40. Когда параметры системы таковы, что влияние упругих связей незначительно, или при решении задач, в которых с
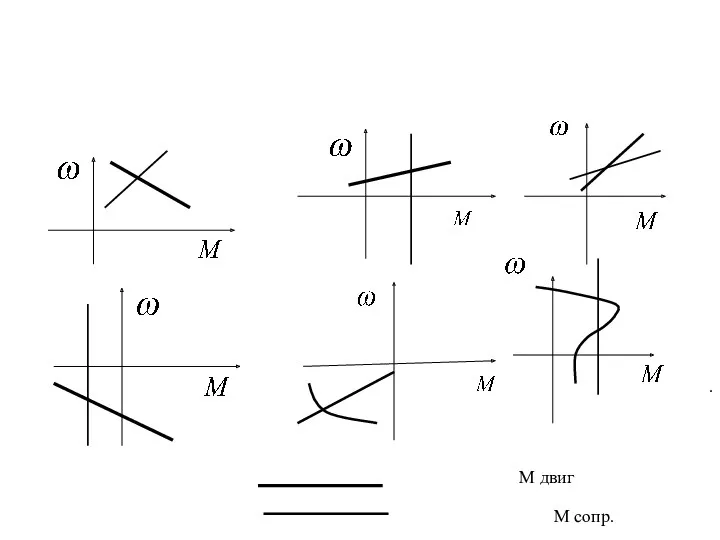
- 42. Для устойчивости статического режима необходимо, чтобы при бесконечно малом отклонении скорости , вызванном каким либо возмущением,
- 44. ‹ 0.
- 45. . М двиг М сопр.
- 47. Скачать презентацию
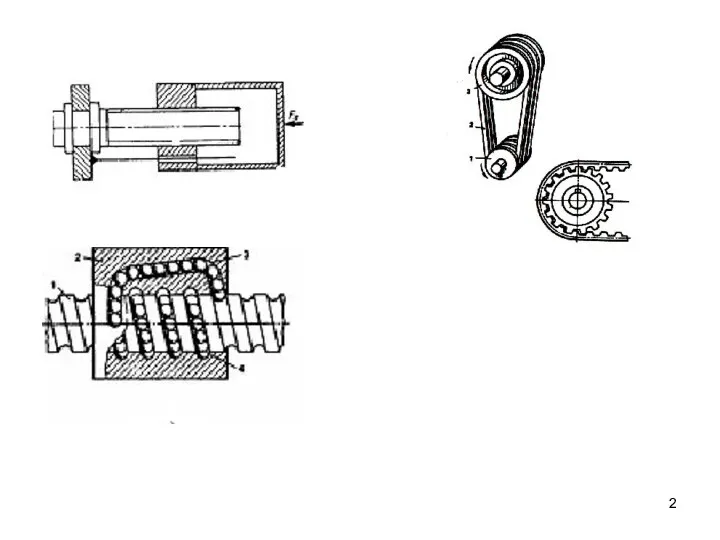
![Л.2 Механика привода Редуктор коэффициент редукции РЗП радиус приведения [ М] Шатунно-кривошипный механизм](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/394890/slide-2.jpg)
Л.2 Механика привода
Редуктор коэффициент редукции
РЗП радиус приведения [ М]
Шатунно-кривошипный механизм
Л.2 Механика привода
Редуктор коэффициент редукции
РЗП радиус приведения [ М]
Шатунно-кривошипный механизм
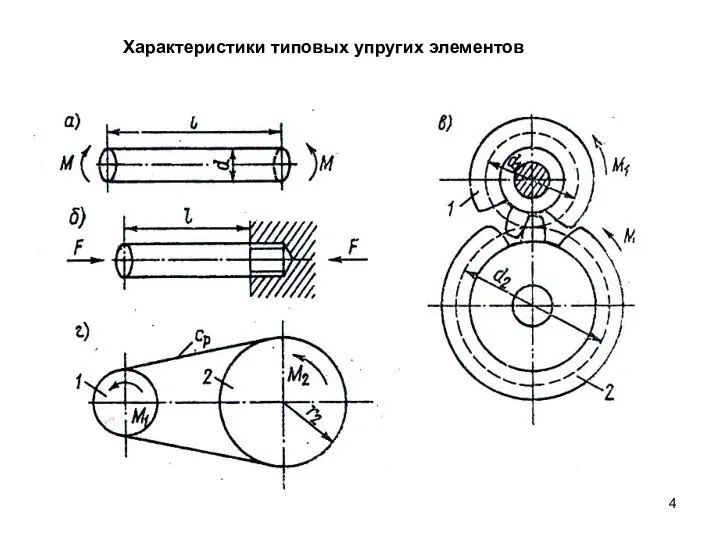
Характеристики типовых упругих элементов
Характеристики типовых упругих элементов
Вал, работающий на кручение характеризуется углом закручивания
Коэффициент жесткости определяется отношением
Вал, работающий на кручение характеризуется углом закручивания
Коэффициент жесткости определяется отношением
Растягиваемый или сжимаемый стержень,
к которому приложена сила F, имеет
Растягиваемый или сжимаемый стержень,
к которому приложена сила F, имеет
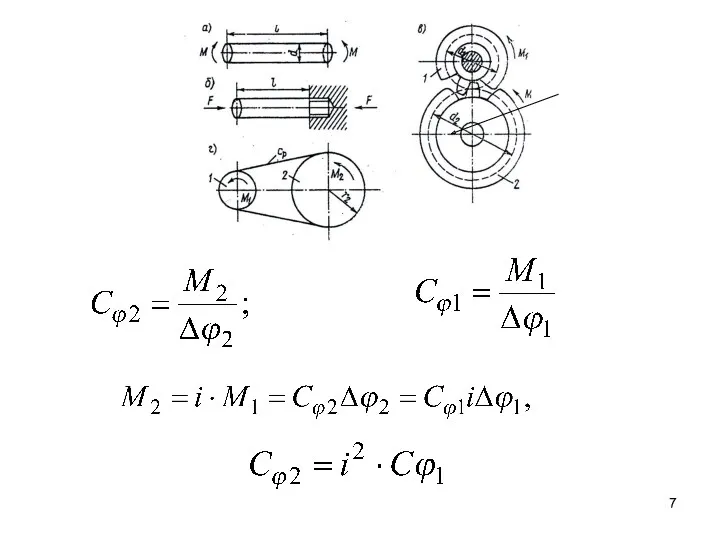
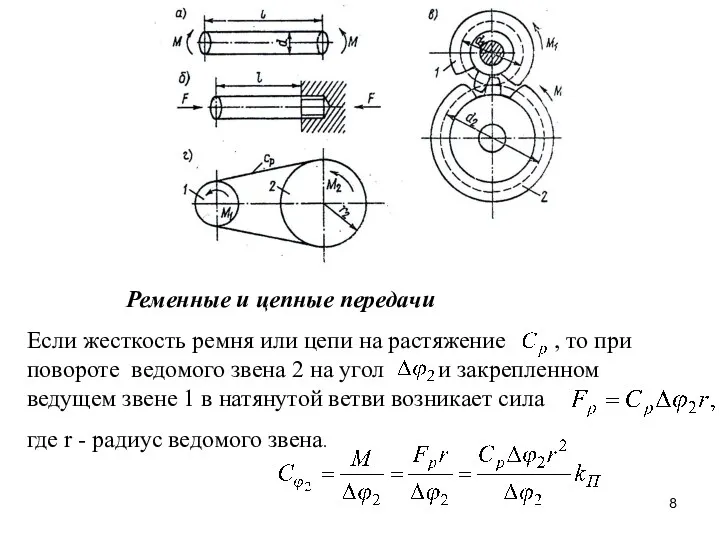
Ременные и цепные передачи
Если жесткость ремня или цепи на
Ременные и цепные передачи
Если жесткость ремня или цепи на
Непосредственное представление о движущихся массах установки и механических связях между
Непосредственное представление о движущихся массах установки и механических связях между
Массы элементов и жесткости элементарных связей в кинематической цепи привода различны.
Массы элементов и жесткости элементарных связей в кинематической цепи привода различны.
Для сведения любой реальной системы к простейшей модели нужно выполнить ряд
Для сведения любой реальной системы к простейшей модели нужно выполнить ряд
Условием соответствия приведенной расчетной схемы реальной механической системе является выполнение закона
Условием соответствия приведенной расчетной схемы реальной механической системе является выполнение закона
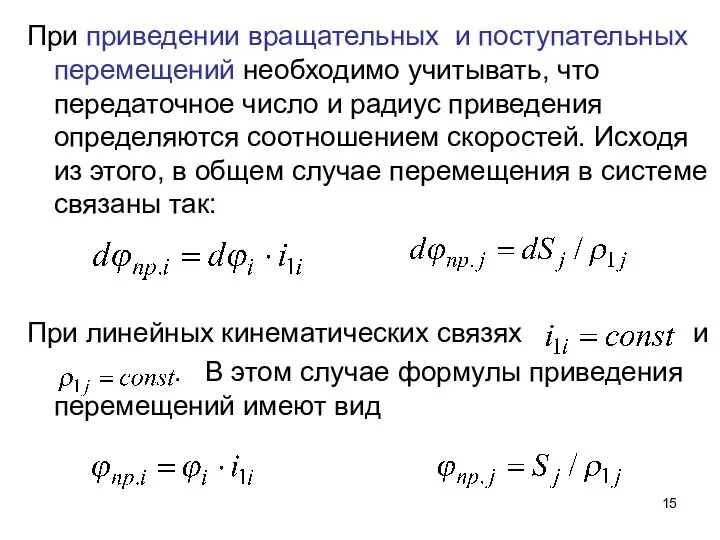
При приведении вращательных и поступательных перемещений необходимо учитывать, что передаточное число
При приведении вращательных и поступательных перемещений необходимо учитывать, что передаточное число
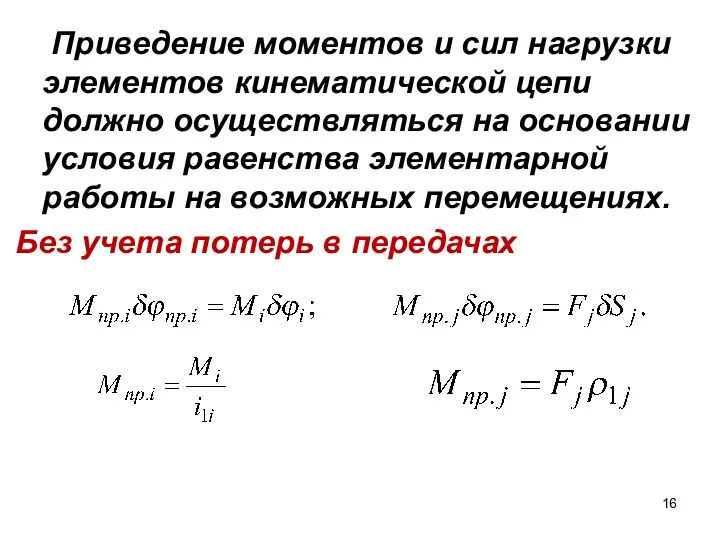
Приведение моментов и сил нагрузки элементов кинематической цепи должно осуществляться
Приведение моментов и сил нагрузки элементов кинематической цепи должно осуществляться
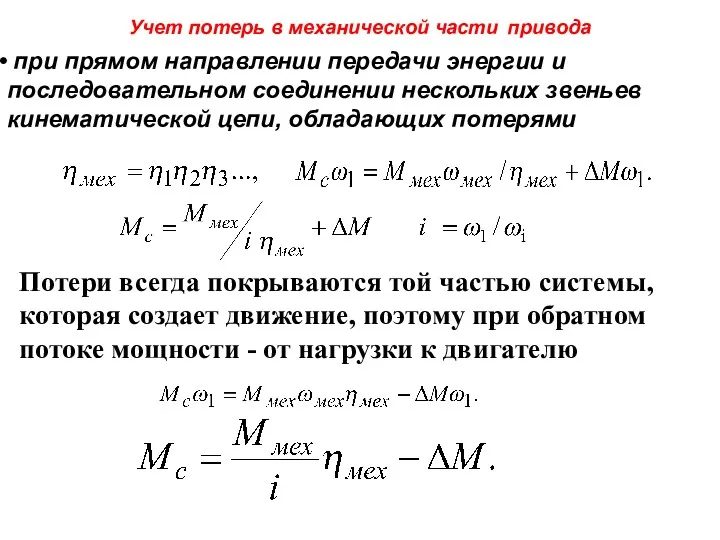
Учет потерь в механической части привода
при прямом направлении передачи энергии
Учет потерь в механической части привода
при прямом направлении передачи энергии
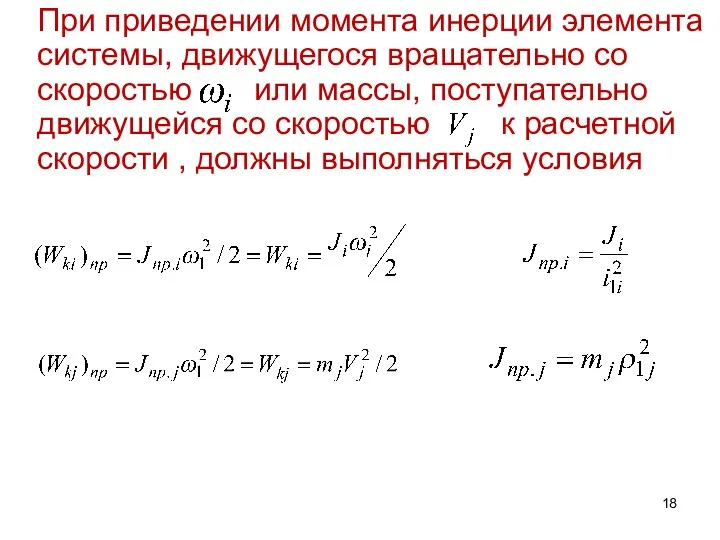
При приведении момента инерции элемента системы, движущегося вращательно со скоростью или
При приведении момента инерции элемента системы, движущегося вращательно со скоростью или
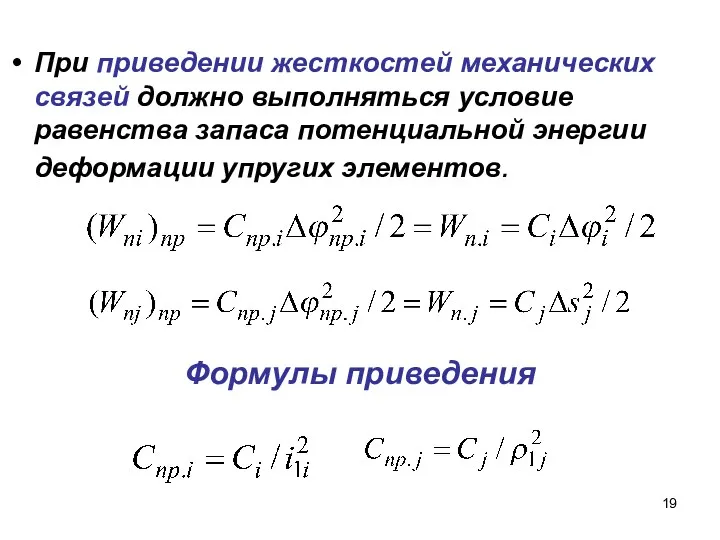
При приведении жесткостей механических связей должно выполняться условие равенства запаса потенциальной
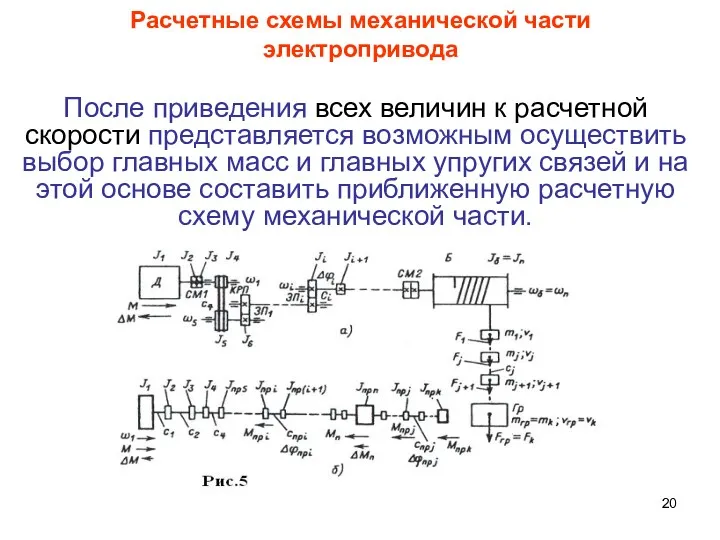
Расчетные схемы механической части электропривода
После приведения всех величин к расчетной скорости
Расчетные схемы механической части электропривода
После приведения всех величин к расчетной скорости
Расчетные схемы механической части электропривода 2
Для примера в ней выделены три
Расчетные схемы механической части электропривода 2
Для примера в ней выделены три
Расчетные схемы механической части электропривода
В большинстве практических случаев в результате
Расчетные схемы механической части электропривода
В большинстве практических случаев в результате
Трехмассовая упругая система
при исследовании электромеханических систем автоматизированного электропривода используется
Трехмассовая упругая система
при исследовании электромеханических систем автоматизированного электропривода используется
Для исследования отдельных физических особенностей трехмассовая расчетная схема часто сводится к
Для исследования отдельных физических особенностей трехмассовая расчетная схема часто сводится к
Электромеханическая система с двухмассовой упругой механической частью представляет собой простейшую модель
Электромеханическая система с двухмассовой упругой механической частью представляет собой простейшую модель
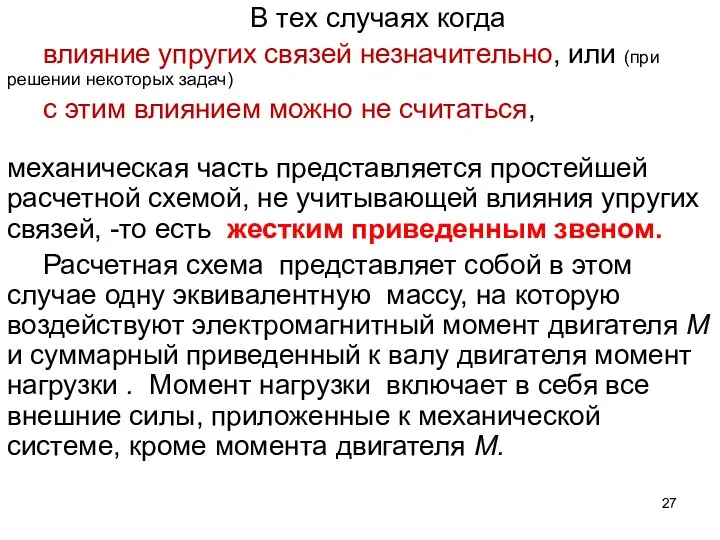
В тех случаях когда
влияние упругих связей незначительно, или (при
В тех случаях когда
влияние упругих связей незначительно, или (при
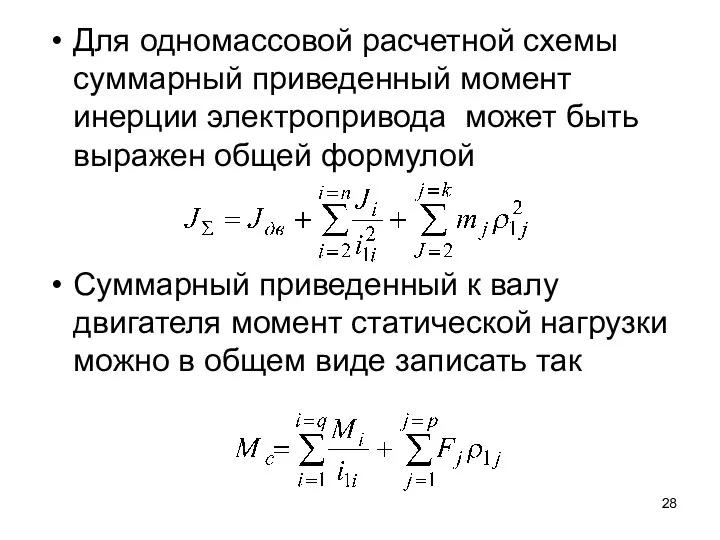
Для одномассовой расчетной схемы суммарный приведенный момент инерции электропривода может быть
Для одномассовой расчетной схемы суммарный приведенный момент инерции электропривода может быть
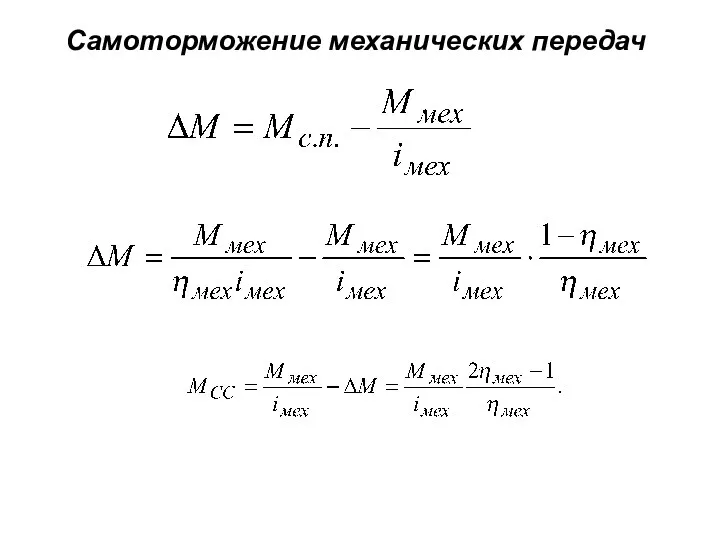
Самоторможение механических передач
Самоторможение механических передач

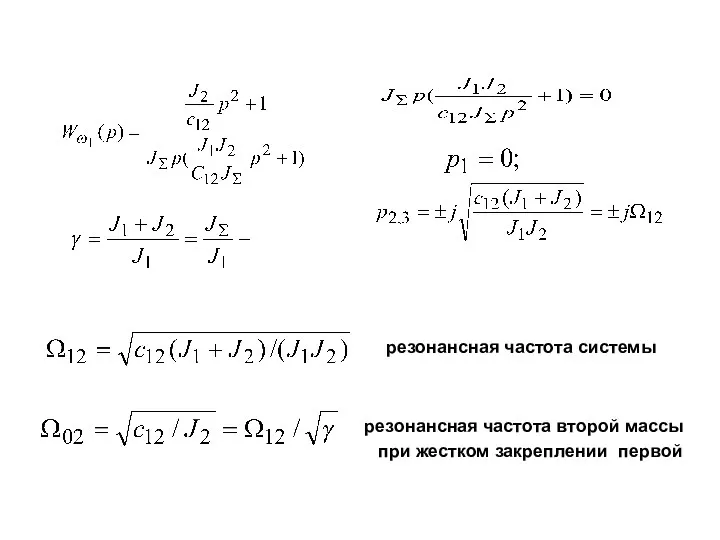
резонансная частота второй массы
при жестком закреплении первой
резонансная частота системы
резонансная частота второй массы
при жестком закреплении первой
резонансная частота системы
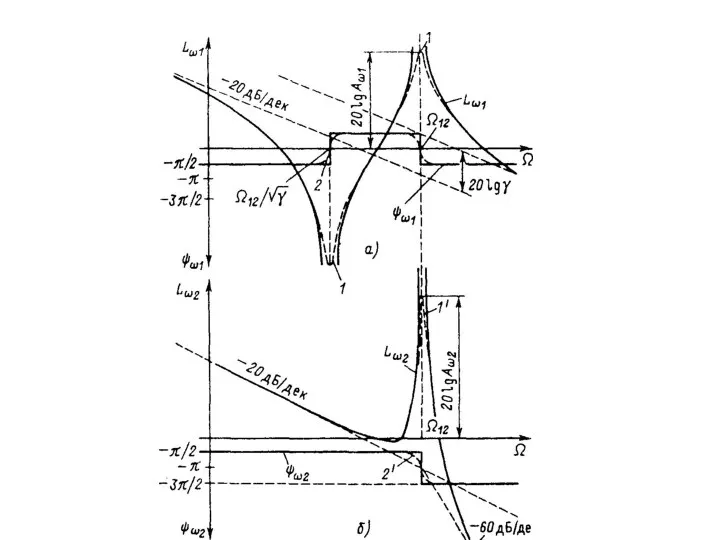
Обратим внимание на различия во влиянии упругости на движение первой и
Обратим внимание на различия во влиянии упругости на движение первой и
При приближении частоты колебаний момента к резонансной амплитуды
колебаний скорости
При приближении частоты колебаний момента к резонансной амплитуды
колебаний скорости
Если механизм обладает небольшой инерцией (J2 много меньше чем J1) то
Когда параметры системы таковы, что влияние упругих связей незначительно, или при
Когда параметры системы таковы, что влияние упругих связей незначительно, или при
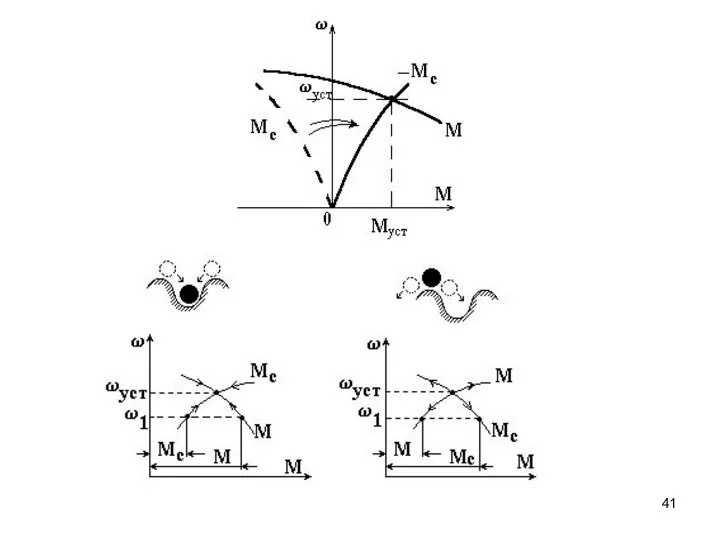
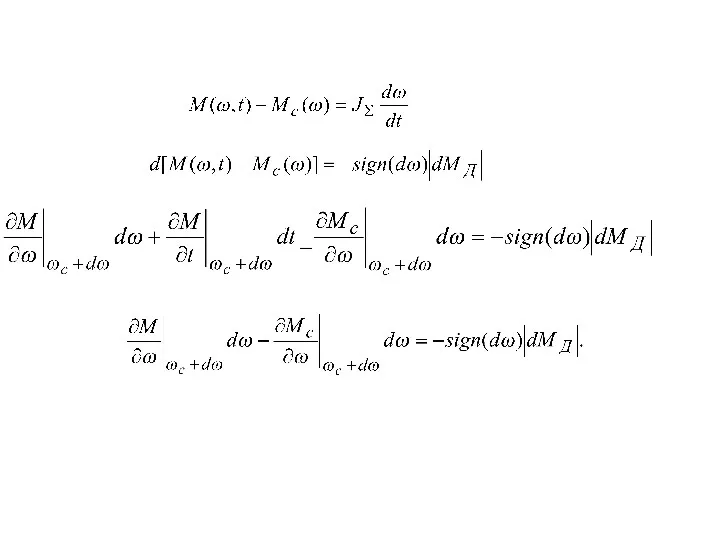
Для устойчивости статического режима необходимо, чтобы при бесконечно малом отклонении скорости
Для устойчивости статического режима необходимо, чтобы при бесконечно малом отклонении скорости
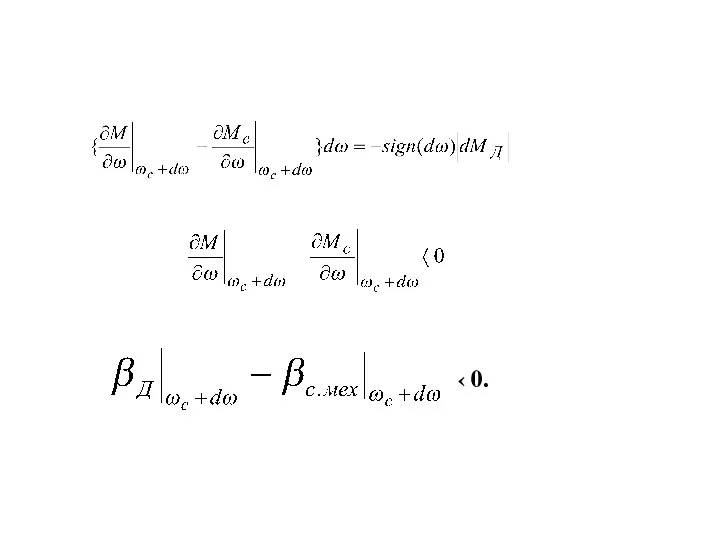
‹ 0.
‹ 0.
.
М двиг
М сопр.
.
М двиг
М сопр.
 Давление. Единицы давления. Способы уменьшения и увеличения давления
Давление. Единицы давления. Способы уменьшения и увеличения давления Двигатели внутреннего сгорания
Двигатели внутреннего сгорания Фізичні характеристики Сонця
Фізичні характеристики Сонця Способ установки фаркопа для легковых автомобилей категории М1 и его сертификация
Способ установки фаркопа для легковых автомобилей категории М1 и его сертификация Импульс, закон сохранения импульса
Импульс, закон сохранения импульса ИК-спектроскопия
ИК-спектроскопия Электромагнитное излучение. Свойства излучения Электромагнитное излучение, исследуемое в астрофизике
Электромагнитное излучение. Свойства излучения Электромагнитное излучение, исследуемое в астрофизике Механика твердого тела. (Лекция 4)
Механика твердого тела. (Лекция 4) Физические основы воздействия на атмосферные процессы. Реагенты
Физические основы воздействия на атмосферные процессы. Реагенты Цель и задачи курса Техническая механика. Расчеты на прочность. Расчеты на жесткость
Цель и задачи курса Техническая механика. Расчеты на прочность. Расчеты на жесткость Электронная презентация Изопроцессы в идеальном газе
Электронная презентация Изопроцессы в идеальном газе Теплотехника. Термодинамика открытых систем
Теплотехника. Термодинамика открытых систем Электрический ток в металлах. Электролитическая диссоциация. Электролиз
Электрический ток в металлах. Электролитическая диссоциация. Электролиз Энергия. Работа. Мощность
Энергия. Работа. Мощность NW Rapid Site Installation
NW Rapid Site Installation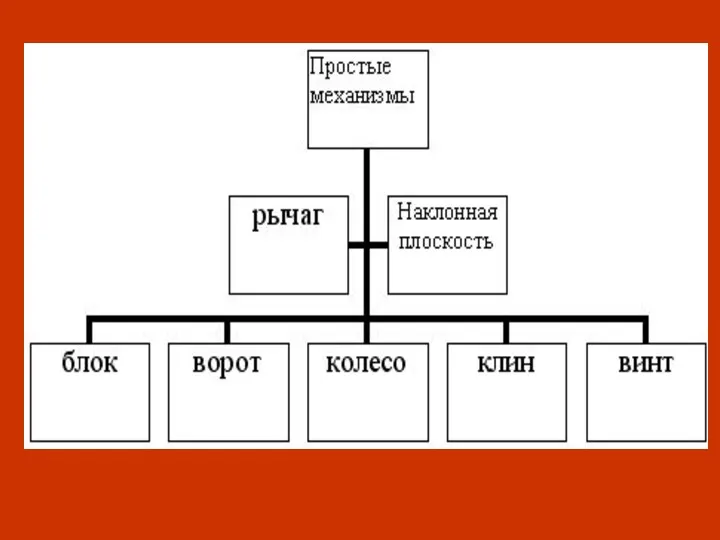 Простые механизмы
Простые механизмы Гетерогенный химический процесс система газ твердое
Гетерогенный химический процесс система газ твердое Стоячие волны
Стоячие волны Конспект урока по физике в 7 классе Сообщающиеся сосуды
Конспект урока по физике в 7 классе Сообщающиеся сосуды Сила трения
Сила трения Механизмы переноса тепла: теплопроводность, конвекция, излучение
Механизмы переноса тепла: теплопроводность, конвекция, излучение Сила трения. Особенности сил трения
Сила трения. Особенности сил трения Закон сохранения энергии, 7 класс
Закон сохранения энергии, 7 класс Огляд конструкцій плугів спец. призначення. Огляд конструкцій фрезерних машин, ямокопачів, площадкоутворювачів. Лекція 4 (ч. 2)
Огляд конструкцій плугів спец. призначення. Огляд конструкцій фрезерних машин, ямокопачів, площадкоутворювачів. Лекція 4 (ч. 2) Ремонт и сборка зубчатых передач
Ремонт и сборка зубчатых передач Система единиц СИ. Векторные и скалярные величины
Система единиц СИ. Векторные и скалярные величины Основні закономірності термодинаміки. Термостатика та термодинаміка. Лекція 1
Основні закономірності термодинаміки. Термостатика та термодинаміка. Лекція 1 Ректификация үдерісі
Ректификация үдерісі