- Методы эффективного управления инверторами напряжения в приводах переменного тока

Содержание
- 2. ШИМ-модуляция базовых векторов Структура типового инвертора для управления 3-х фазным двигателем
- 3. ШИМ-генератор Выбор между классической и «векторной» ШИМ-модуляцией
- 4. Модуль ШИМ контроллера F28x Таймер Т1 – является базовым для менеджера событий A, на базе которого
- 5. Асимметричная ШИМ Задержка переднего фронта для активного высокого!
- 6. Центрированная ШИМ Задержка заднего фронта для активного низкого!
- 7. Состояния инвертора и базовые вектора
- 8. Состояния инвертора и базовые вектора
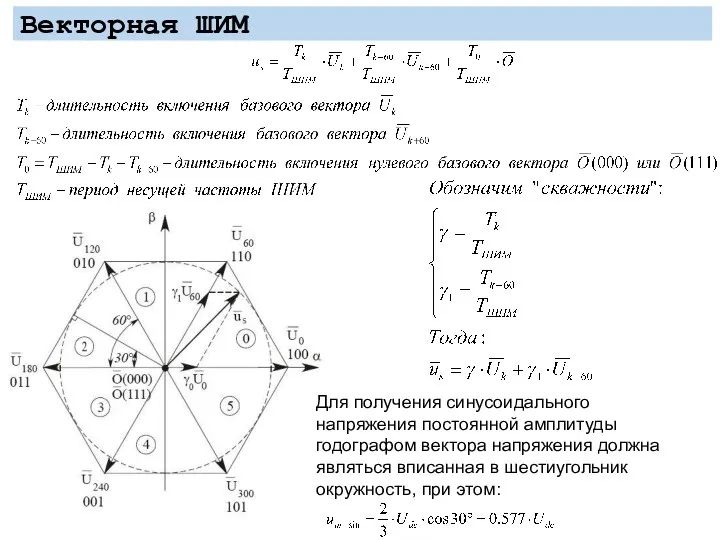
- 9. Векторная ШИМ Из условия инвариантности мгновенных значений электрических величин:
- 10. ШИМ-модуляция базовых векторов Базовые вектора- в одной стойке включен только один ключ
- 11. 6 состояний, 6 базовых векторов
- 12. Векторная ШИМ Для получения синусоидального напряжения постоянной амплитуды годографом вектора напряжения должна являться вписанная в шестиугольник
- 13. Сравнение эффективности центрированной и векторной ШИМ-модуляции Классическое управление в режиме центированной ШИМ-модуляции Управление в режиме «векторной»
- 14. Реализация «векторной» ШИМ на базе центрированной
- 15. Реализация одного вектора двумя способами
- 20. Бутстрепное питание драйвера ключа
- 21. 6-секторная векторная ШИМ
- 22. Определение сектора и скважностей Вектор напряжения в относительных единицах: В матричной форме (в осях α-β): Тогда:
- 23. Определение сектора и скважностей Для каждого сектора величины U*k,α, U*k+60,β, U*k+60,α, U*k,β являются постоянными:
- 24. Определение сектора и скважностей Введём вспомогательные переменные: Тогда Свяжем однозначно каждый базовый вектор с определённым сектором:
- 25. Определение сектора и скважностей В соответствии с этим можно составить итоговую таблицу, согласно которой работает алгоритм
- 26. Ограничение вектора напряжения Ограничение вектора на уровне максимальной амплитуды (постоянство фазы)
- 27. Инициализация Таймера 1 void PWM6SECT_Init(int period) { // Инициализируем регистр периода Таймера 1 EvaRegs.T1PR = period;
- 28. Настройка «мёртвого» времени // Настраиваем модуль генератора "мёртвого" времени EvaRegs.DBTCONA.all = DBT_VAL_15 + \ // период
- 29. Настройка полярности выходов ШИМ // Настраиваем поведение (полярность работы) выходов ШИМ EvaRegs.ACTRA.all = COMPARE1_AH + \
- 30. Инициализация модуля сравнения // Настраиваем модуль сравнения EvaRegs.COMCONA.all = CMPR_ENABLE + \ // разрешить операцию сравнения
- 31. Инициализация портов ввода/вывода // Настраиваем нужные дискретные порты ввода/вывода на выполнение спецфункций EALLOW; // разрешить доступ
- 32. //Основная процедура модуля векторной ШИМ void PWM6SECT_Update( _iq UaRef, // задание выходного напряжения по оси Alpha
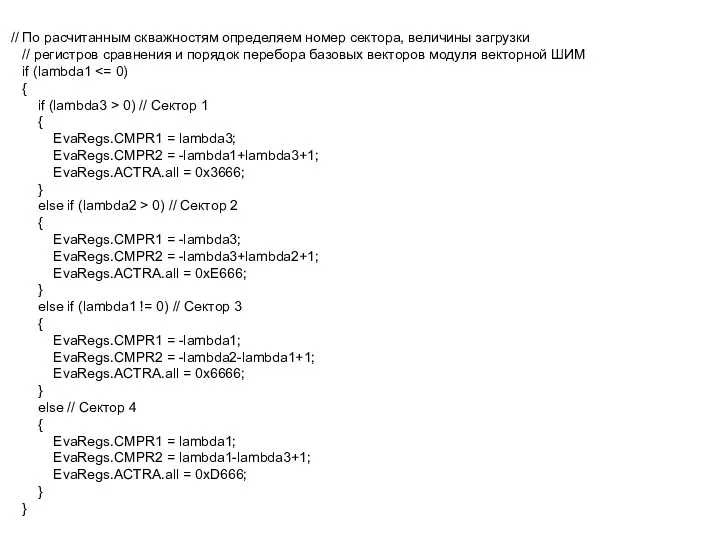
- 33. // По расчитанным скважностям определяем номер сектора, величины загрузки // регистров сравнения и порядок перебора базовых
- 34. else { if (lambda2 > 0) { // Сектор 0 EvaRegs.CMPR1 = lambda2; EvaRegs.CMPR2 = lambda2+lambda1+1;
- 35. Коррекция амплитуды вектора // Приводим компоненты заданного вектора напряжения к масштабу окружности, // ограниченной базовыми векторами
- 36. Расчёт скважности базовых векторов // Рассчитываем скважности базовых векторов непосредственно в единицах // загрузки регистров сравнения
- 37. Определение номера сектора и скважностей // По расчитанным скважностям определяем номер сектора, величины загрузки // регистров
- 39. Скачать презентацию
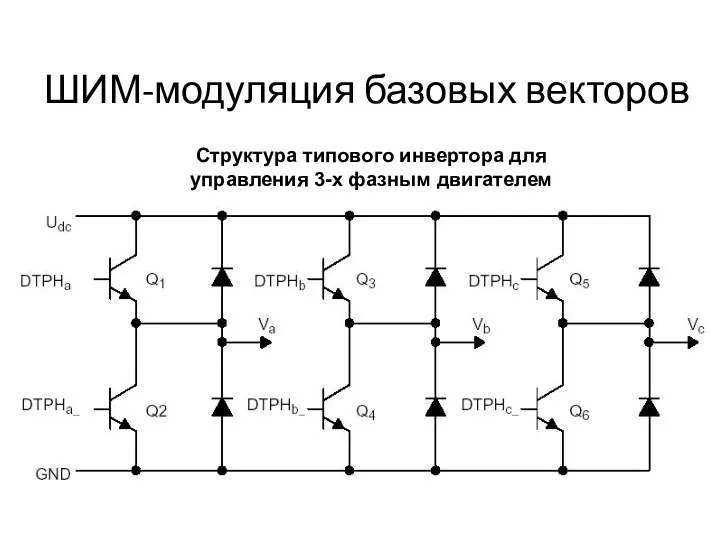
ШИМ-модуляция базовых векторов
Структура типового инвертора для управления 3-х фазным двигателем
ШИМ-модуляция базовых векторов
Структура типового инвертора для управления 3-х фазным двигателем
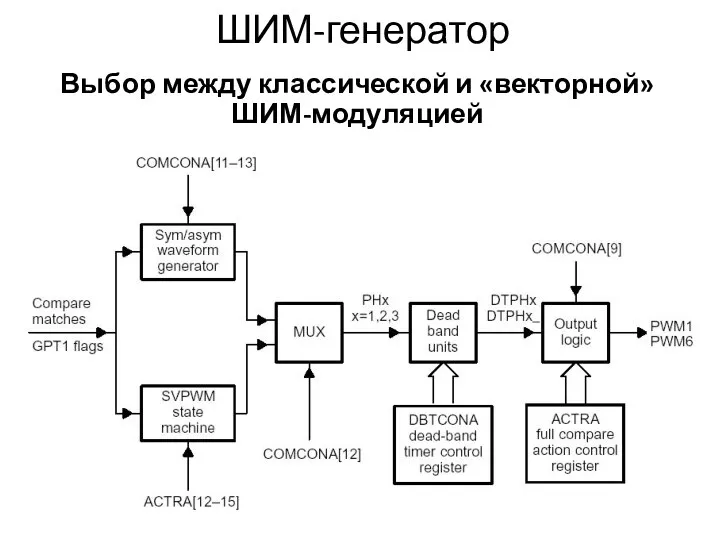
ШИМ-генератор
Выбор между классической и «векторной» ШИМ-модуляцией
ШИМ-генератор
Выбор между классической и «векторной» ШИМ-модуляцией
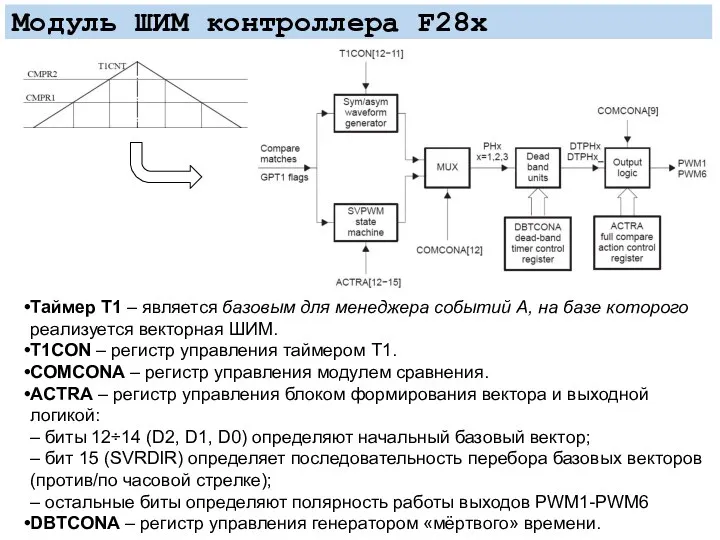
Модуль ШИМ контроллера F28x
Таймер Т1 – является базовым для менеджера событий
Модуль ШИМ контроллера F28x
Таймер Т1 – является базовым для менеджера событий
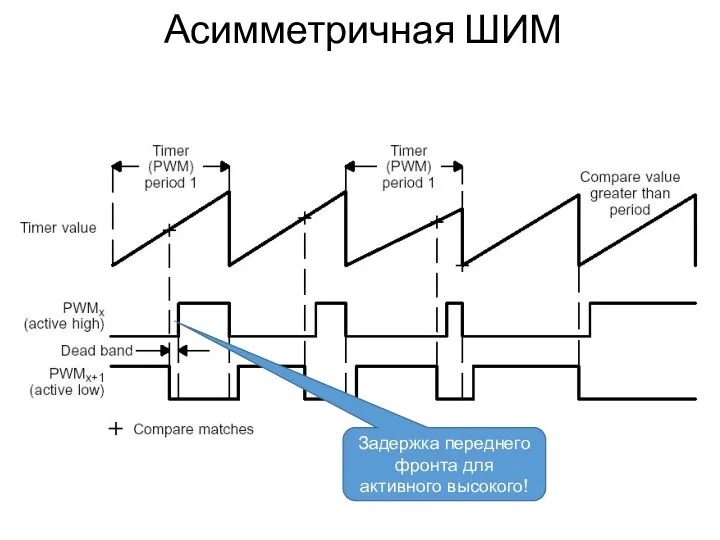
Асимметричная ШИМ
Задержка переднего фронта для активного высокого!
Асимметричная ШИМ
Задержка переднего фронта для активного высокого!
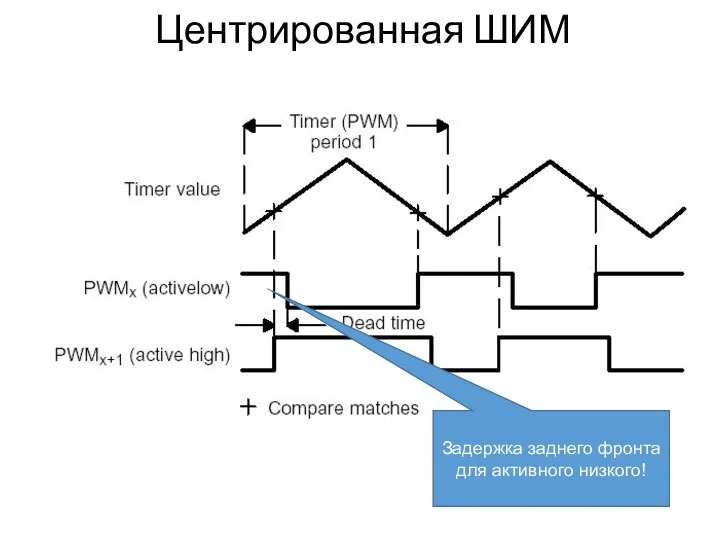
Центрированная ШИМ
Задержка заднего фронта для активного низкого!
Центрированная ШИМ
Задержка заднего фронта для активного низкого!

Состояния инвертора и базовые вектора
Состояния инвертора и базовые вектора

Состояния инвертора и базовые вектора
Состояния инвертора и базовые вектора
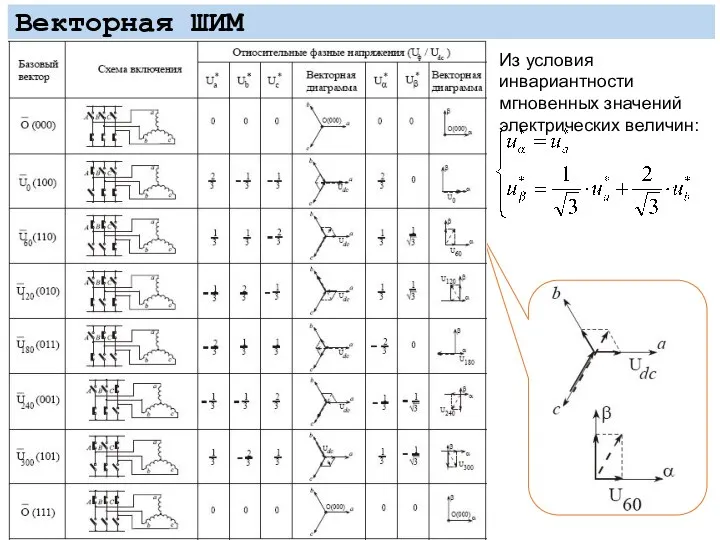
Векторная ШИМ
Из условия инвариантности мгновенных значений электрических величин:
Векторная ШИМ
Из условия инвариантности мгновенных значений электрических величин:
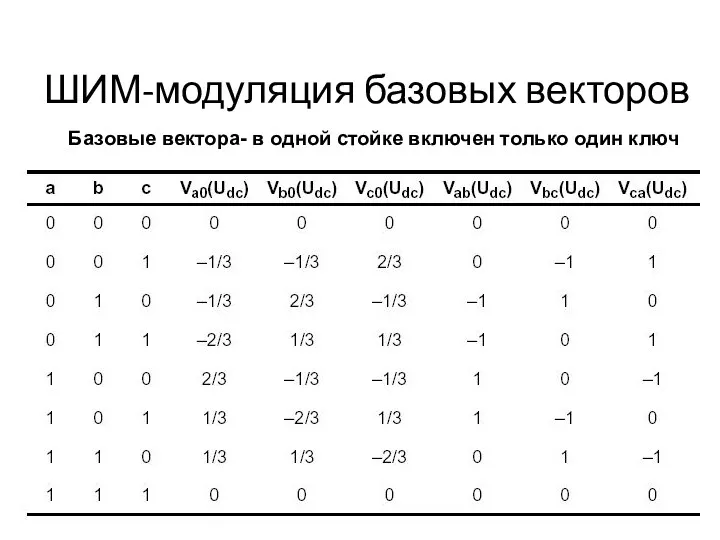
ШИМ-модуляция базовых векторов
Базовые вектора- в одной стойке включен только один
ШИМ-модуляция базовых векторов
Базовые вектора- в одной стойке включен только один
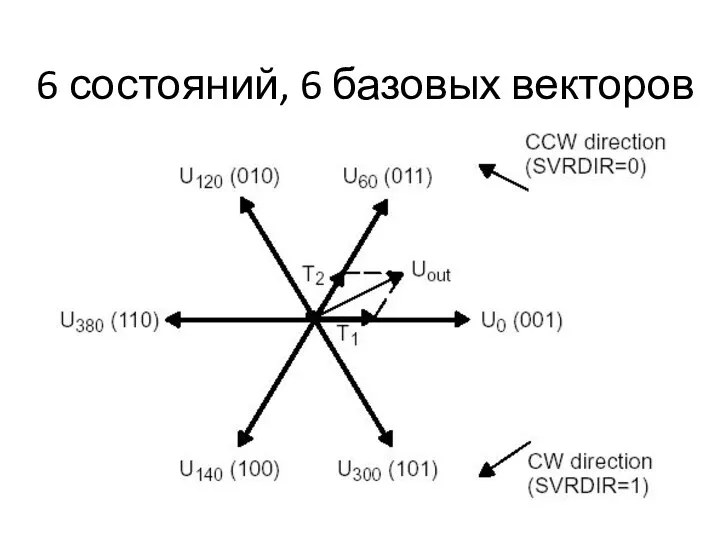
6 состояний, 6 базовых векторов
6 состояний, 6 базовых векторов
Векторная ШИМ
Для получения синусоидального напряжения постоянной амплитуды годографом вектора напряжения должна
Векторная ШИМ
Для получения синусоидального напряжения постоянной амплитуды годографом вектора напряжения должна

Сравнение эффективности центрированной и векторной ШИМ-модуляции
Классическое управление в режиме
центированной ШИМ-модуляции
Управление
Сравнение эффективности центрированной и векторной ШИМ-модуляции
Классическое управление в режиме
центированной ШИМ-модуляции
Управление
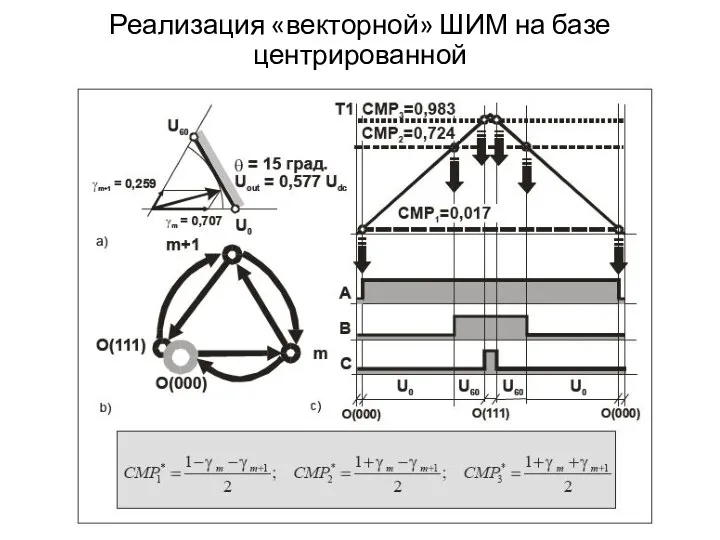
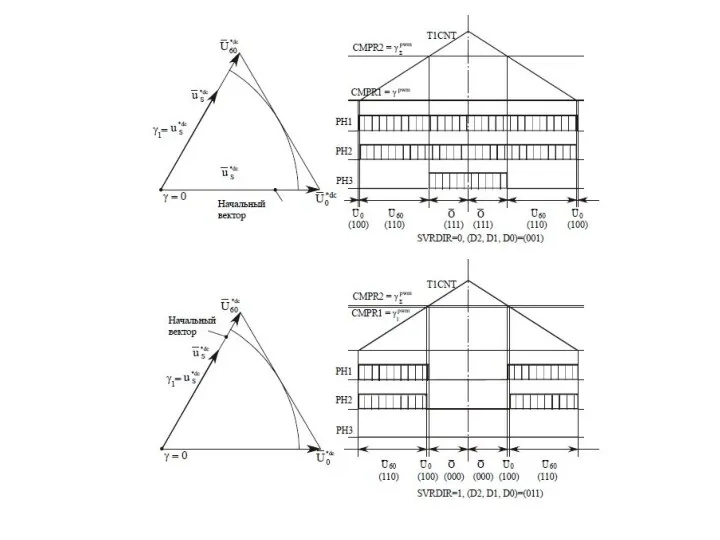
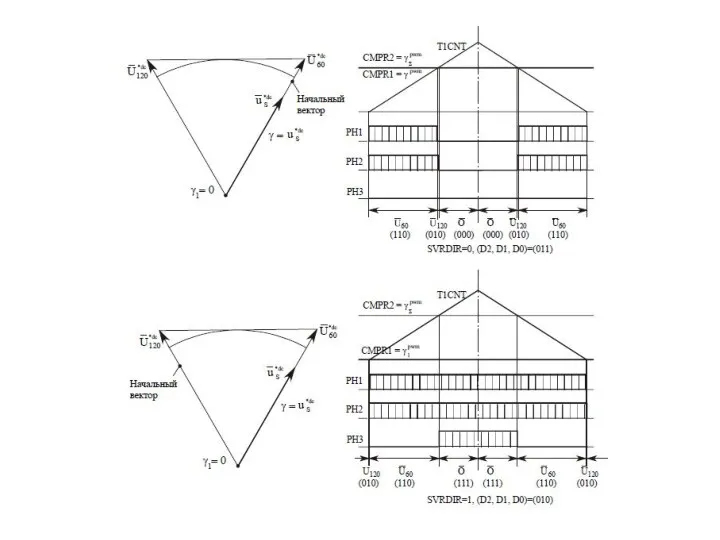
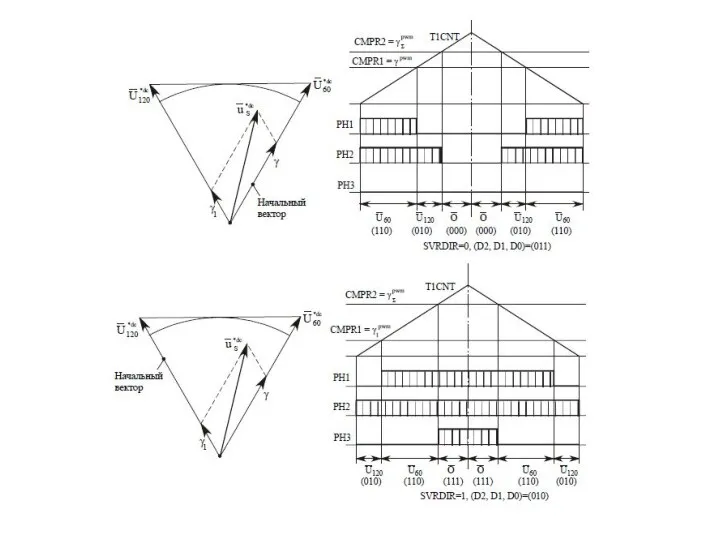
Реализация «векторной» ШИМ на базе центрированной
Реализация «векторной» ШИМ на базе центрированной
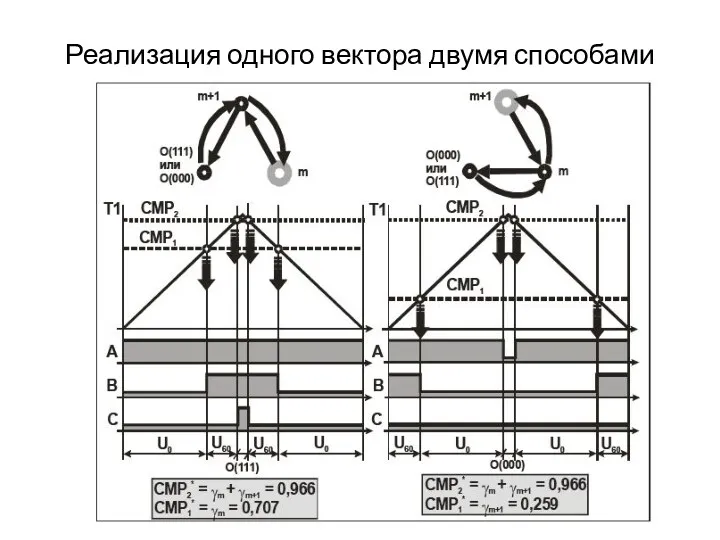
Реализация одного вектора двумя способами
Реализация одного вектора двумя способами
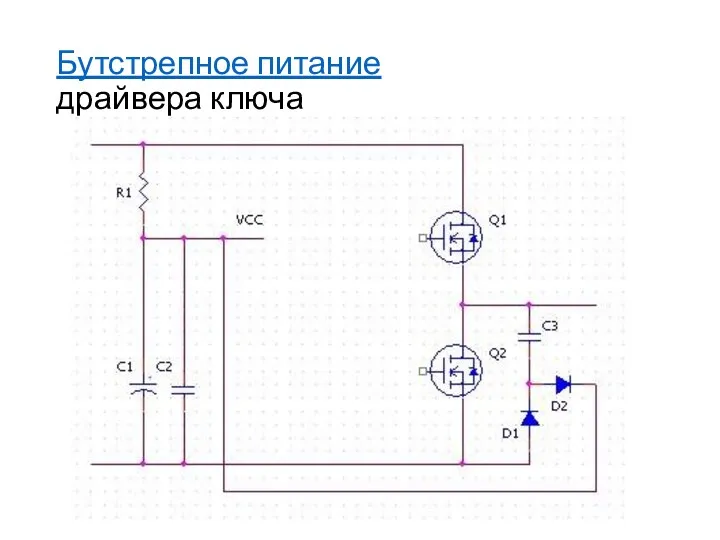
Бутстрепное питание
драйвера ключа
Бутстрепное питание
драйвера ключа
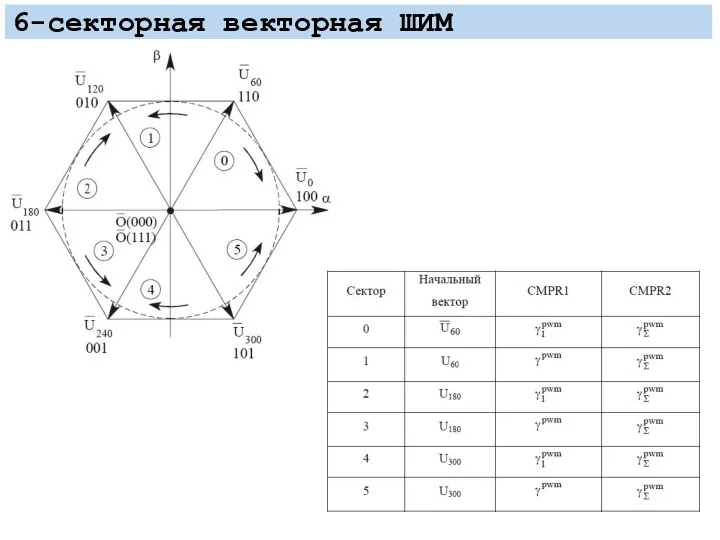
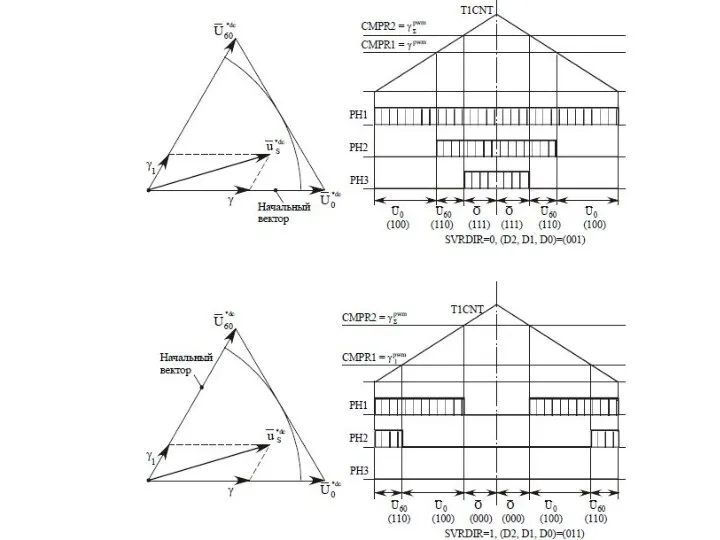
6-секторная векторная ШИМ
6-секторная векторная ШИМ
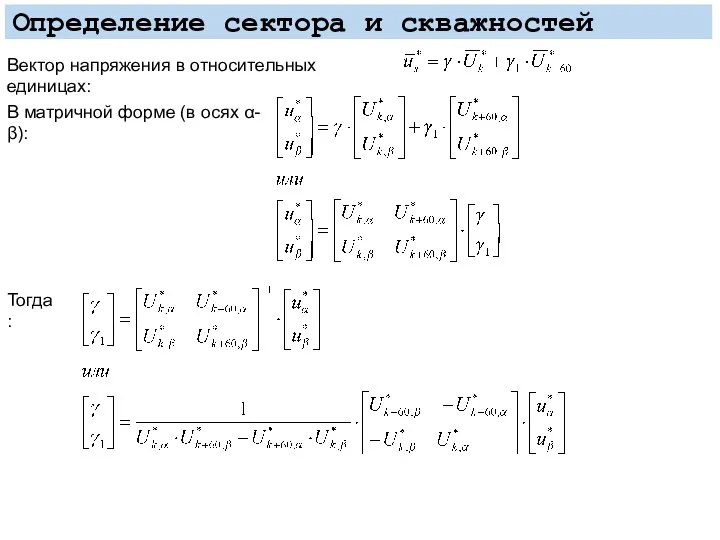
Определение сектора и скважностей
Вектор напряжения в относительных единицах:
В матричной форме (в
Определение сектора и скважностей
Вектор напряжения в относительных единицах:
В матричной форме (в
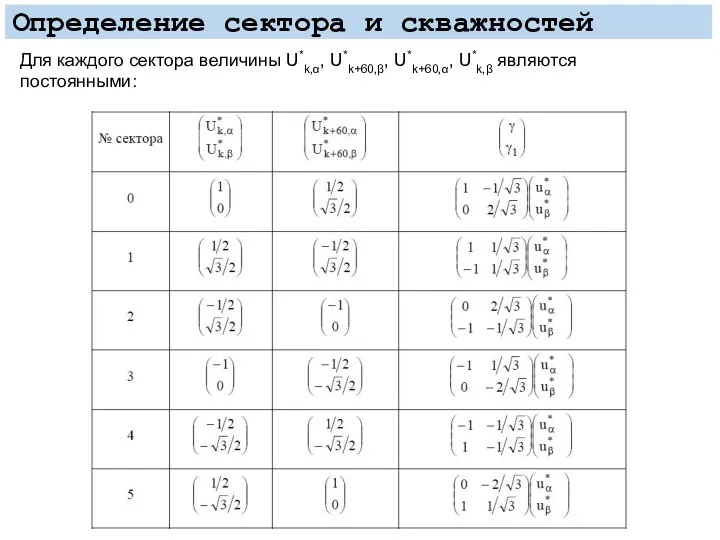
Определение сектора и скважностей
Для каждого сектора величины U*k,α, U*k+60,β, U*k+60,α, U*k,β
Определение сектора и скважностей
Для каждого сектора величины U*k,α, U*k+60,β, U*k+60,α, U*k,β
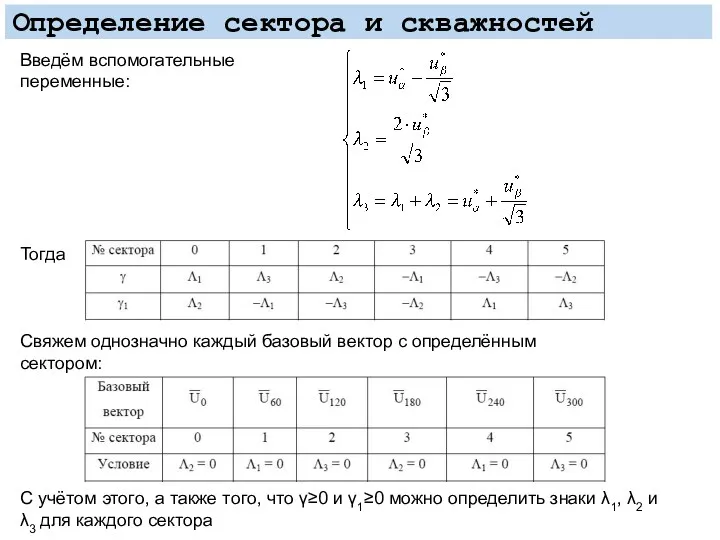
Определение сектора и скважностей
Введём вспомогательные переменные:
Тогда
Свяжем однозначно каждый базовый вектор с
Определение сектора и скважностей
Введём вспомогательные переменные:
Тогда
Свяжем однозначно каждый базовый вектор с
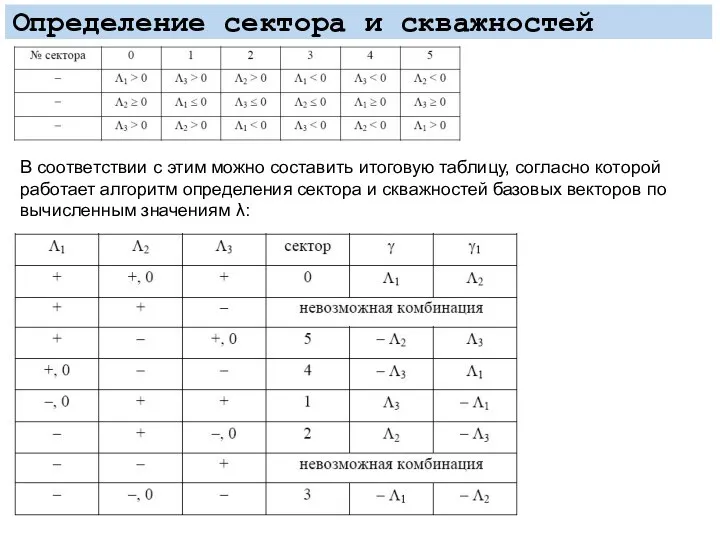
Определение сектора и скважностей
В соответствии с этим можно составить итоговую таблицу,
Определение сектора и скважностей
В соответствии с этим можно составить итоговую таблицу,
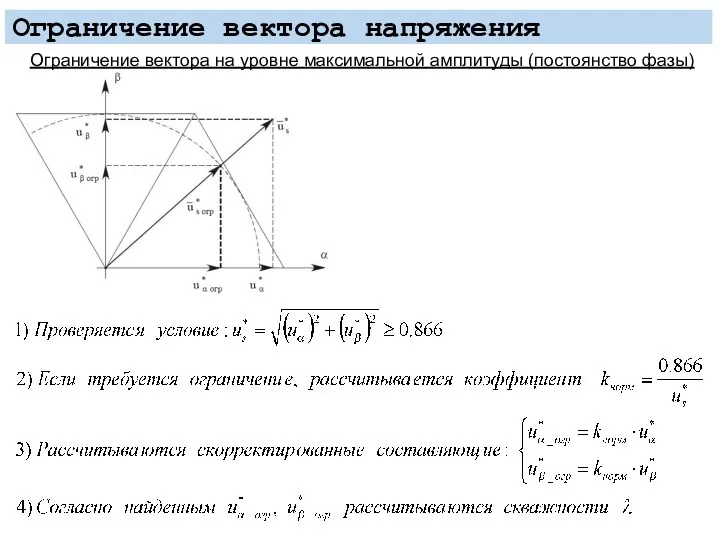
Ограничение вектора напряжения
Ограничение вектора на уровне максимальной амплитуды (постоянство фазы)
Ограничение вектора напряжения
Ограничение вектора на уровне максимальной амплитуды (постоянство фазы)
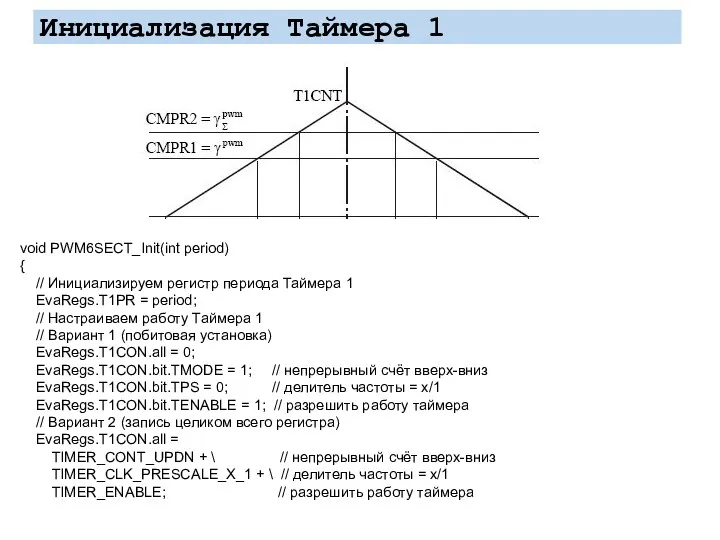
Инициализация Таймера 1
void PWM6SECT_Init(int period)
{
// Инициализируем регистр периода Таймера
Инициализация Таймера 1
void PWM6SECT_Init(int period)
{
// Инициализируем регистр периода Таймера

Настройка «мёртвого» времени
// Настраиваем модуль генератора "мёртвого" времени
EvaRegs.DBTCONA.all =
Настройка «мёртвого» времени
// Настраиваем модуль генератора "мёртвого" времени
EvaRegs.DBTCONA.all =
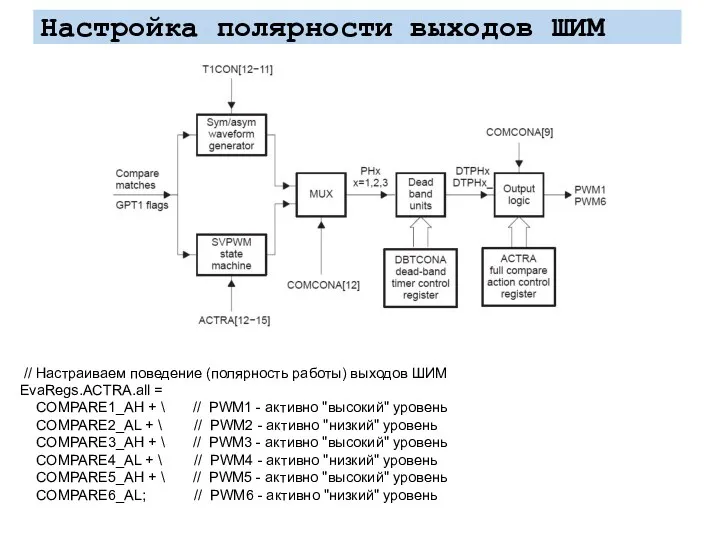
Настройка полярности выходов ШИМ
// Настраиваем поведение (полярность работы) выходов ШИМ
EvaRegs.ACTRA.all
Настройка полярности выходов ШИМ
// Настраиваем поведение (полярность работы) выходов ШИМ
EvaRegs.ACTRA.all
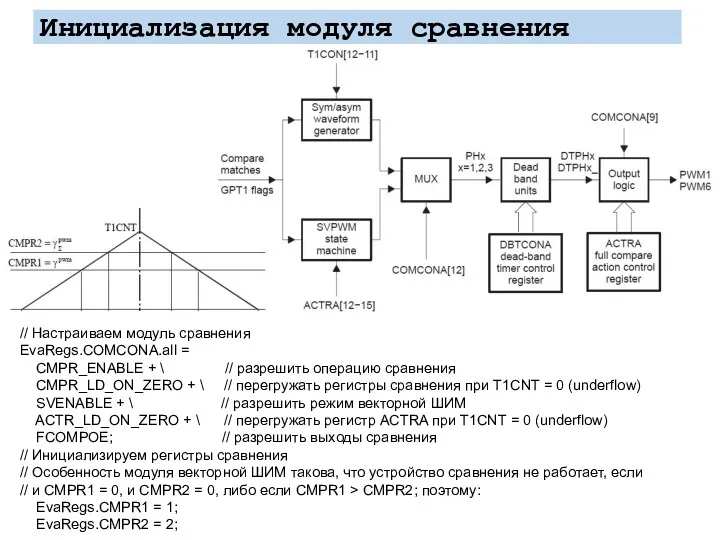
Инициализация модуля сравнения
// Настраиваем модуль сравнения
EvaRegs.COMCONA.all =
CMPR_ENABLE + \ //
Инициализация модуля сравнения
// Настраиваем модуль сравнения
EvaRegs.COMCONA.all =
CMPR_ENABLE + \ //
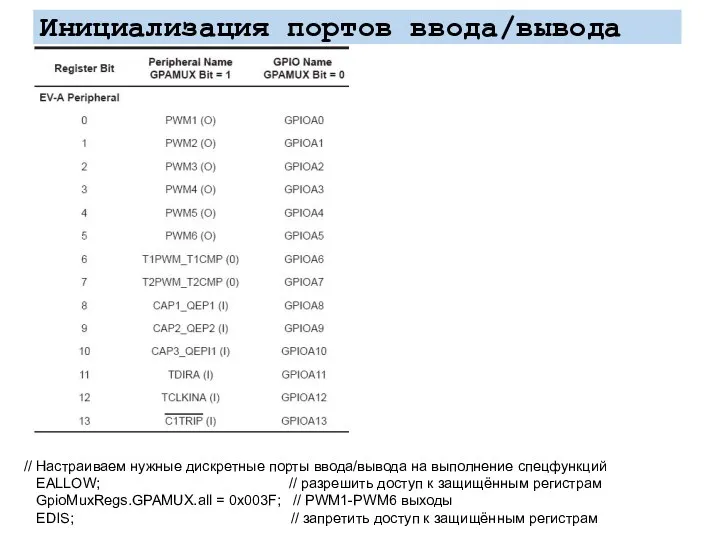
Инициализация портов ввода/вывода
// Настраиваем нужные дискретные порты ввода/вывода на выполнение
Инициализация портов ввода/вывода
// Настраиваем нужные дискретные порты ввода/вывода на выполнение
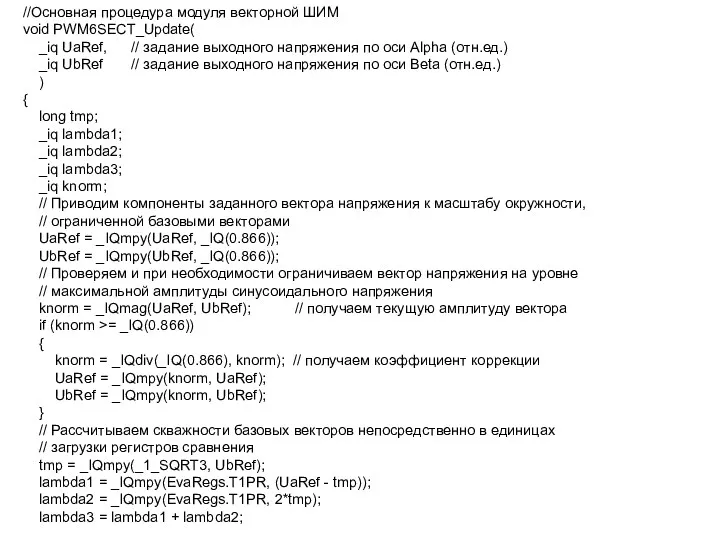
//Основная процедура модуля векторной ШИМ
void PWM6SECT_Update(
_iq UaRef, // задание выходного
//Основная процедура модуля векторной ШИМ
void PWM6SECT_Update(
_iq UaRef, // задание выходного
// По расчитанным скважностям определяем номер сектора, величины загрузки
//
// По расчитанным скважностям определяем номер сектора, величины загрузки
//
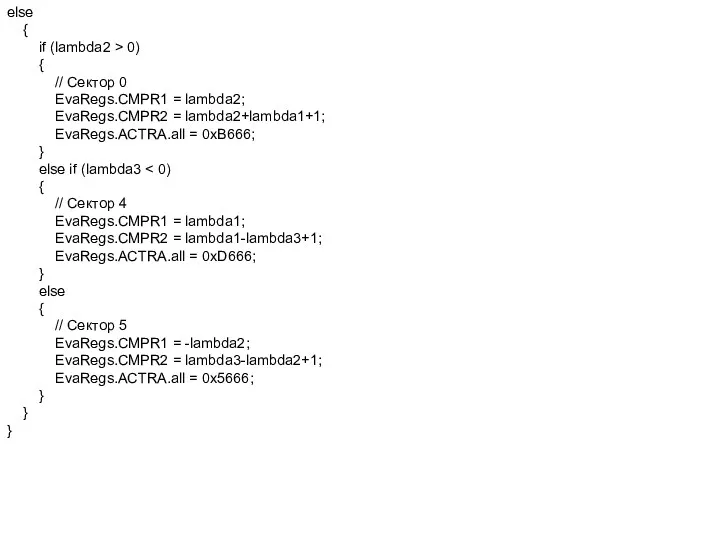
else
{
if (lambda2 > 0)
{
// Сектор 0
EvaRegs.CMPR1
else
{
if (lambda2 > 0)
{
// Сектор 0
EvaRegs.CMPR1
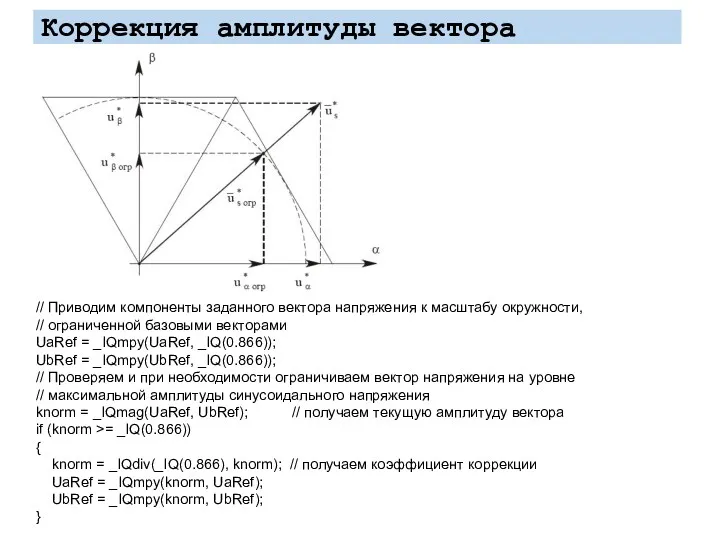
Коррекция амплитуды вектора
// Приводим компоненты заданного вектора напряжения к масштабу
Коррекция амплитуды вектора
// Приводим компоненты заданного вектора напряжения к масштабу
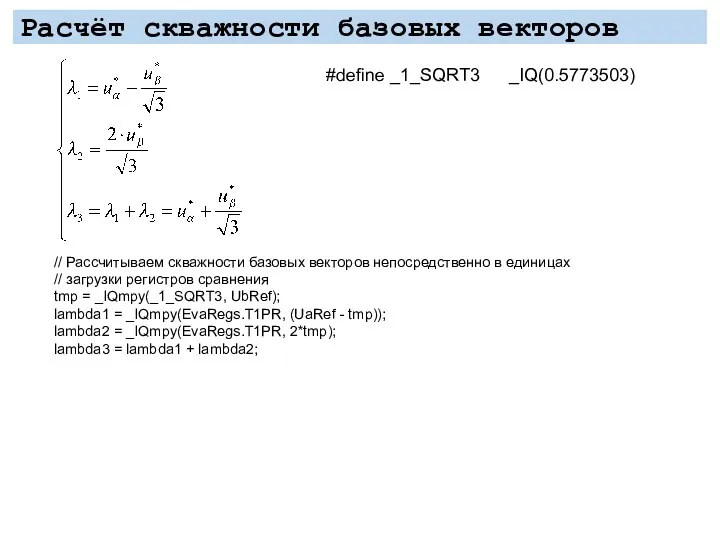
Расчёт скважности базовых векторов
// Рассчитываем скважности базовых векторов непосредственно в
Расчёт скважности базовых векторов
// Рассчитываем скважности базовых векторов непосредственно в
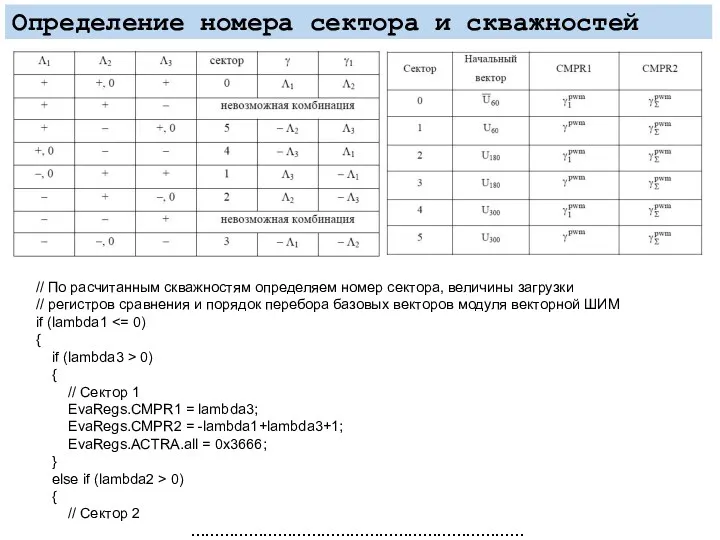
Определение номера сектора и скважностей
// По расчитанным скважностям определяем номер
Определение номера сектора и скважностей
// По расчитанным скважностям определяем номер
 Магнитные цепи постоянного и переменного тока. Лекция 6
Магнитные цепи постоянного и переменного тока. Лекция 6 Электроосветительные приборы
Электроосветительные приборы Тепловые явления. Изменение агрегатных состояний вещества
Тепловые явления. Изменение агрегатных состояний вещества Сущность электромагнитной теории Максвелла
Сущность электромагнитной теории Максвелла Точность деталей сборочных единиц изделий
Точность деталей сборочных единиц изделий Ритмодинамика природы. Эксперимент Майкельсона и возврат эфира в науку
Ритмодинамика природы. Эксперимент Майкельсона и возврат эфира в науку Двигуни внутрішнього згоряння
Двигуни внутрішнього згоряння Организация технического обслуживания и ремонта автомобиля Ford Focus
Организация технического обслуживания и ремонта автомобиля Ford Focus Основы электротехники
Основы электротехники Применение квантовой механики к простейшим задачам. Введение
Применение квантовой механики к простейшим задачам. Введение Потенциал. Разность потенциалов
Потенциал. Разность потенциалов Прямолинейное равномерное движение
Прямолинейное равномерное движение Nuclear fuel cycle
Nuclear fuel cycle Подготовка к ГИА по физике 2013
Подготовка к ГИА по физике 2013 Спектроскопические методы анализа. Атомная спектроскопия
Спектроскопические методы анализа. Атомная спектроскопия Шпиндельные узлы
Шпиндельные узлы Исследование характеристик ККЛ
Исследование характеристик ККЛ Парадоксы времени. Путешествия во времени
Парадоксы времени. Путешествия во времени Методы расчета статически определимых систем на постоянную нагрузку
Методы расчета статически определимых систем на постоянную нагрузку Изучение последовательного и параллельного соединения проводников. Лабораторная работа. 10класс
Изучение последовательного и параллельного соединения проводников. Лабораторная работа. 10класс Технология ремонта кузовов автомобиля
Технология ремонта кузовов автомобиля Сборочные чертежи. Виды соединений деталей
Сборочные чертежи. Виды соединений деталей Содержание курса физики основной школы наше время
Содержание курса физики основной школы наше время Бесконтактные методы контроля температуры
Бесконтактные методы контроля температуры Первое начало термодинамики
Первое начало термодинамики Работа и мощность тока
Работа и мощность тока Kernfusion in der sonne
Kernfusion in der sonne Наноматеріали
Наноматеріали