- Методы синтеза САУ

Содержание
- 2. Каноническая форма структурной схемы контура регулирования ОУ- объект управления; УУ - устройство управления Устройство управления часто
- 3. Передаточные функции непрерывных регуляторов
- 4. Цель и критерии расчета контуров регулирования Параметры регуляторов: коэффициент передачи Кр; постоянная времени интегрирования Tи; постоянная
- 5. Запас устойчивости Im h (-1; j0) Re Определяется по критерию Найквиста как расстояние от точки пересечения
- 6. |W(jω)| = 1 =>Ккр; W(jω)=-1+j∙0 X(ω)=-1 Y(ω)=0 => ωкр; Ккр К К > Ккр – неустойчива;
- 7. Качество управления в установившемся режиме (точность, оценивается статической ошибкой) в неустановившемся режиме (переходном режиме)
- 8. Статическая ошибка исключается применением интегрального звена. Правило: Для устранения статической ошибки интегрирующий элемент нужно включать до
- 9. Определяются по переходной характеристике. Прямые показатели качества Переходная характеристика (h(t)) – реакция системы на единичное входное
- 10. Прямые показатели качества 1. Перерегулирование – максимальное отклонение от установившегося значения, выраженное в долях или процентах
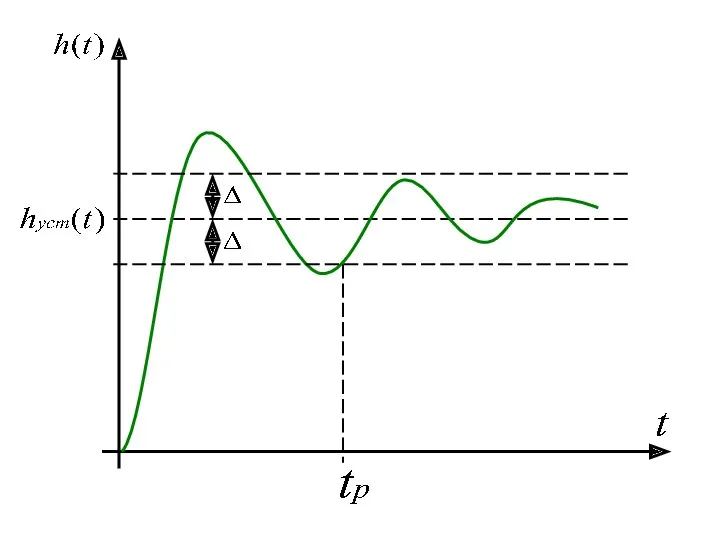
- 11. 2. Время регулирования – отрезок времени, по истечении которого отклонение текущего значения выходной величины от установившегося
- 13. Косвенные (частотные) показатели качества – по АЧХ замкнутой системы
- 14. 1. Частотный показатель колебательности (M) – отношение максимального значения АЧХ замкнутой системы к ее значению при
- 15. Канонический алгоритм расчета настроек регуляторов Алгоритм расчета настроек регуляторов для объекта, заданного кривой отклика имеет ряд
- 16. Задание целевых характеристик Необходимые показатели качества в контуре задаются в техническом регламенте. Это допустимость/недопустимость статической ошибки,
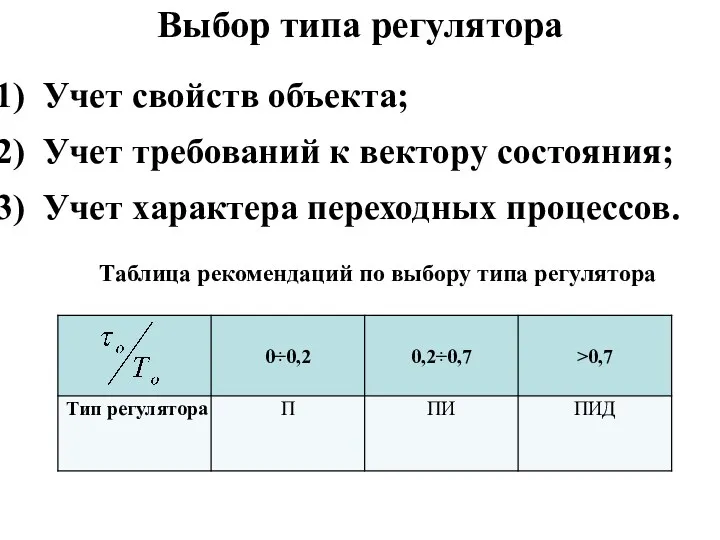
- 17. Выбор типа регулятора Учет свойств объекта; Учет требований к вектору состояния; Учет характера переходных процессов. Таблица
- 18. Определение передаточной функции по кривой отклика Для определения передаточной функции объекта используются различные приемы, один из
- 19. Получение кривой отклика 1. Фиксируется установившееся значение входной и выходной величины (u0; x0) 2. В момент
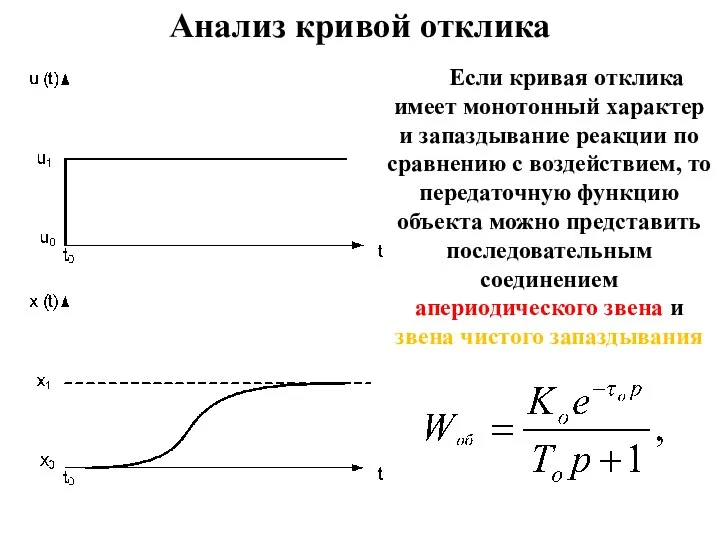
- 20. Анализ кривой отклика Если кривая отклика имеет монотонный характер и запаздывание реакции по сравнению с воздействием,
- 21. Получение характеристик объекта по кривой отклика 1. Строится касательная с наибольшим углом наклона (на основании свойств
- 22. 2. Определяется время t2 пересечения линии х1 и пересечение оси абсцисс t1. 3. Вычисляются параметры: τ0
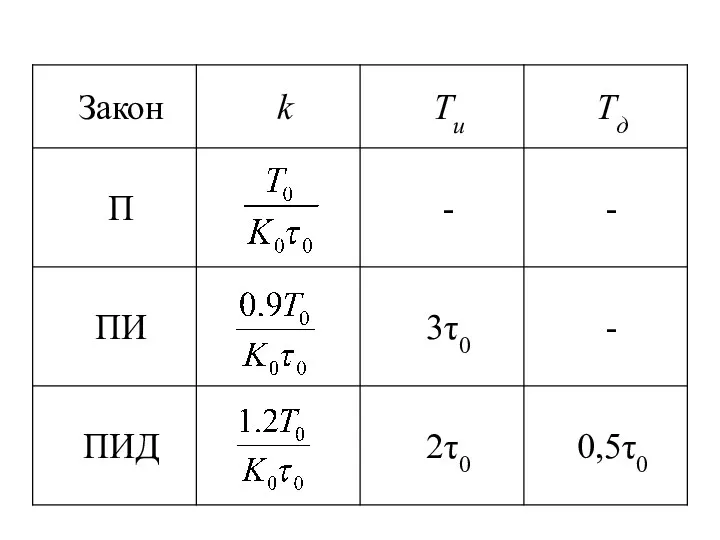
- 23. Расчет настроек Зиглера–Никольса по кривой отклика 1. Задаются определенной скоростью затухания переходного процесса x(t); в данном
- 25. Замечание Перерегулирование и время регулирования в системе в значительной степени зависят от отношения . Чем оно
- 26. Настройки Коэна–Куна выполняются согласно таблице
- 27. Графо-аналитический метод Расчет настроек непрерывных регуляторов по частотному показателю колебательности Применяется только при наличии интегрального звена
- 28. Частотный показатель колебательности М - определяется как отношение максимального значения амплитудно-частотной характеристики замкнутой системы (при резонансной
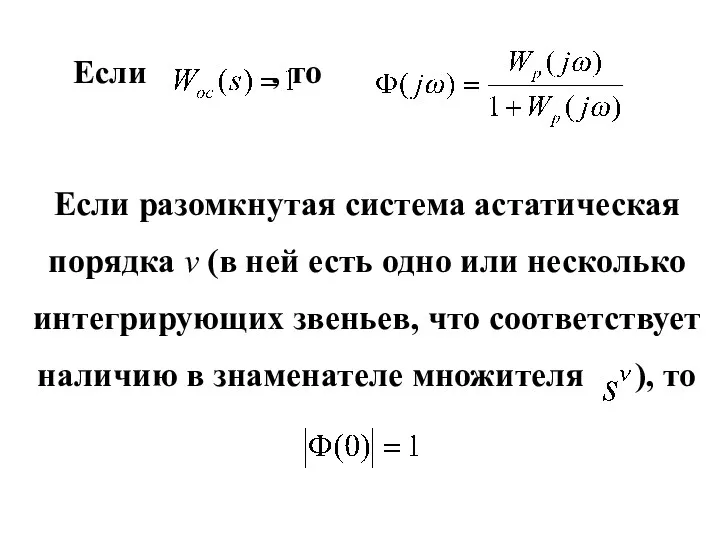
- 29. Если , то Если разомкнутая система астатическая порядка ν (в ней есть одно или несколько интегрирующих
- 30. Мдоп обеспечивает определенный запас устойчивости по амплитуде и по фазе, из-за удаленности от точки (-1;j0) Линии
- 31. Доказательство При
- 33. что соответствует уравнению
- 34. Т.к. Частотный показатель колебательности не должен превышать допустимого значения, то АФЧХ разомкнутой системы не должна заходить
- 35. Алгоритм подбора настроек ПИ – регулятора 1. Если показатель колебательности системы не задан, а известны прямые
- 36. График для определения Pmax и частоты среза по заданному перерегулированию График для определения запаса по амплитуде
- 37. 2. Вычисляются координаты центра окружности и её радиус строится окружность на комплексной плоскости 3. Задаются значениями
- 38. Если АФЧХ зашла в окружность, коэффициент великоват, его надо уменьшить. В этом случае запас устойчивости меньше,
- 39. Если АФЧХ не доходит до окружности, коэффициент передачи нужно увеличить. Запас устойчивости в этом случае больше
- 40. При касании АФЧХ и окружности выполняется заданный запас устойчивости.
- 41. Если Wp (jω) заходит в окружность, Кр нужно уменьшить (Тu =const), если не касается окружности, то
- 42. Все данные заносятся в таблицу За оптимальные принимаются те настройки, для которых отношение имеет наибольшее значение
- 43. Наибольшее отношение можно определить, анализируя последний столбец таблицы. Вблизи наибольшего отношения можно уменьшить шаг и уточнить
- 44. Из опыта известно, что оптимальные настройки не должны значительно отличаться от наибольшей постоянной времени объекта. Поэтому
- 45. зависит от тогда Если Постоянная времени регулятора может компенсировать нежелательную постоянную времени объекта
- 46. 7. Проверяется фактическое значение частотного показателя колебательности с выбранными настройками. Для этого: 7.1. Записывается передаточная функция
- 47. 7.2. Записывается передаточная функция разомкнутой системы 7.3. Записывается передаточная функция замкнутой системы 7.4 На основании передаточной
- 48. 7.5 Если фактические значения показателей качества оказались не хуже заданных, то настройки регулятора считаются оптимальными. В
- 49. Особенности расчета настроек ПИД–регулятора 1. В регуляторе ПИД–типа настраиваемых параметров уже три , т.к. передаточная функция
- 50. 2. Для применения известного алгоритма расчета настроек ПИ-регулятора вводится параметр , который задается заранее. Расчет проводится
- 51. 4. Передаточная функция регулятора записывается как
- 52. Расчет настроек дискретных регуляторов В настоящее время устройства управления имеют дискретный характер сигналов, а объекты работают
- 53. Процесс преобразования непрерывного сигнала в дискретную форму предполагает его квантование или дискретизацию. Квантование может выполняться по
- 54. Квантование может выполняться одновременно и по времени, и по уровню. Значения непрерывного сигнала через определенные моменты
- 55. Классификация дискретных систем по видам формирования импульсов (модуляция) АИМ, ШИМ, ФИМ, ЧИМ АИМ Первого рода Второго
- 56. Алгоритм расчета настроек дискретных регуляторов методом ограничения на частотный показатель колебательности выбор допустимого значения частотного показателя
- 57. построение АФЧХ разомкнутой системы в общем виде; выбор интервала варьирования постоянной времени интегрирования Ти; выбор одного
- 58. Данный алгоритм имеет общие шаги с расчетом настроек непрерывных регуляторов. Однако, имеются ряд особенностей: Выбор периода
- 59. Выбор периода квантования Период квантования выбирается с учетом следующих требований: - сохранность информации; - возможности аппаратуры;
- 60. ИЧ НЧ Импульсная часть (как правило УУ) Импульсное устройство Функциональные элементы, преобразователи Построение передаточной функции приведенной
- 61. Реализация: дискретные регуляторы, ключи, ЦВУ, АЦП, ЦАП и т.д.
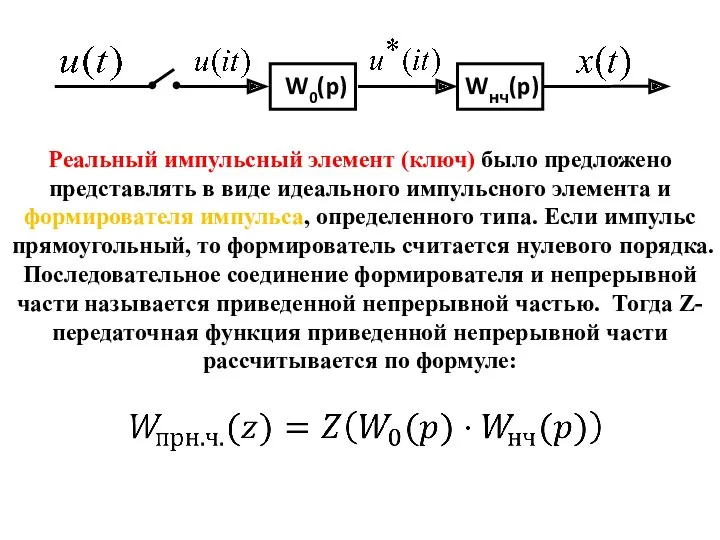
- 62. W0(p) Wнч(p) Реальный импульсный элемент (ключ) было предложено представлять в виде идеального импульсного элемента и формирователя
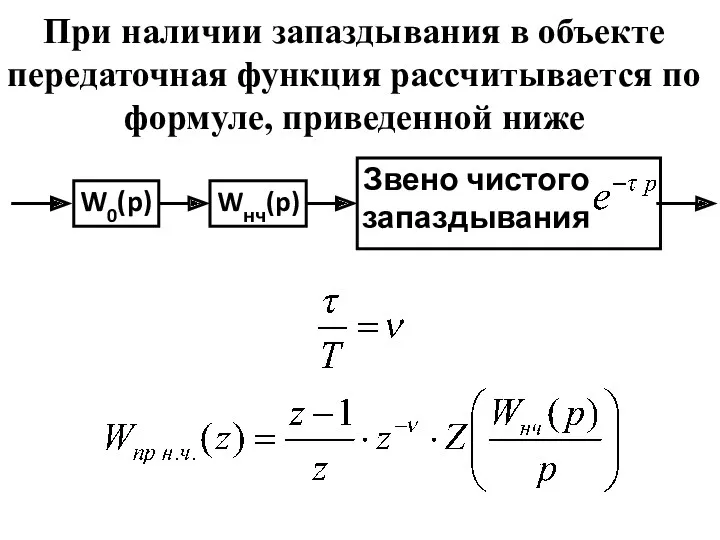
- 63. W0(p) Wнч(p) Звено чистого запаздывания При наличии запаздывания в объекте передаточная функция рассчитывается по формуле, приведенной
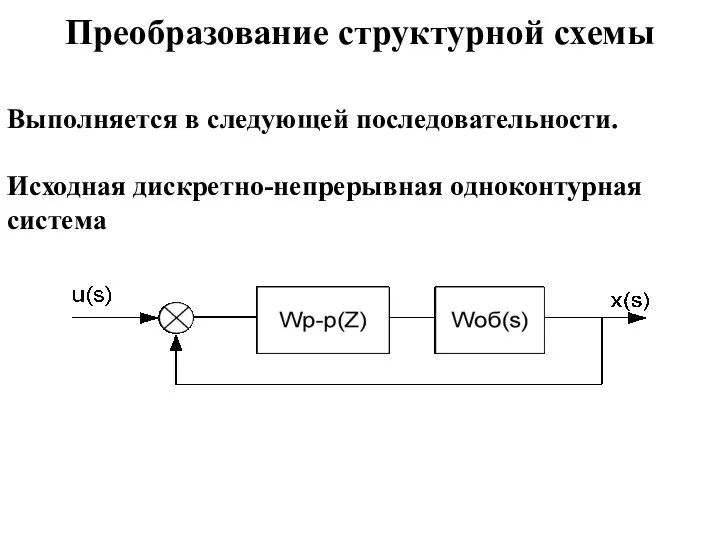
- 64. Преобразование структурной схемы Выполняется в следующей последовательности. Исходная дискретно-непрерывная одноконтурная система
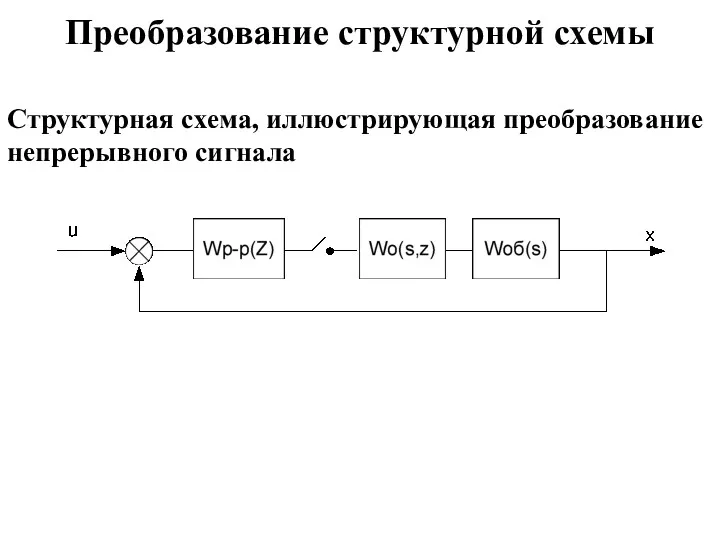
- 65. Преобразование структурной схемы Структурная схема, иллюстрирующая преобразование непрерывного сигнала
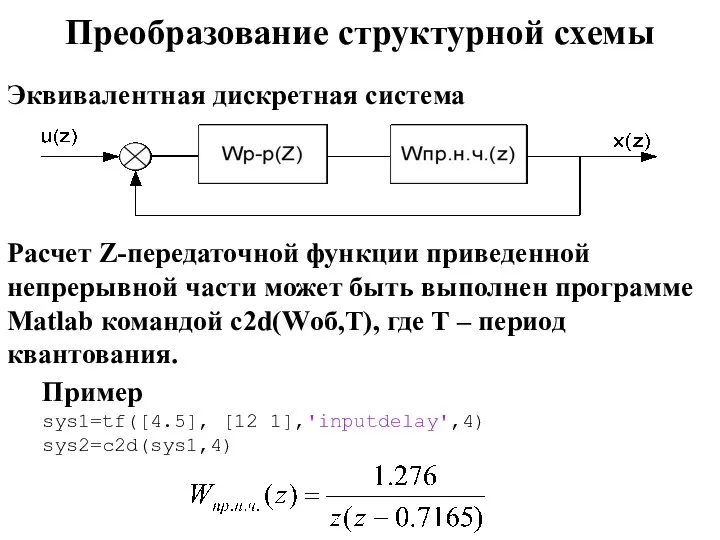
- 66. Преобразование структурной схемы Эквивалентная дискретная система Расчет Z-передаточной функции приведенной непрерывной части может быть выполнен программе
- 67. Остальные этапы расчета настроек ПИ или ПИД-регулятора идентичны методу расчета настроек непрерывных регуляторов
- 68. Эмпирические методы Метод Зиглера-Никольса Используется только для устойчивых объектов
- 69. Эмпирический алгоритм 1. К реальному объекту прикладывают пропорциональное управление с очень малым коэффициентом усиления 2. Коэффициент
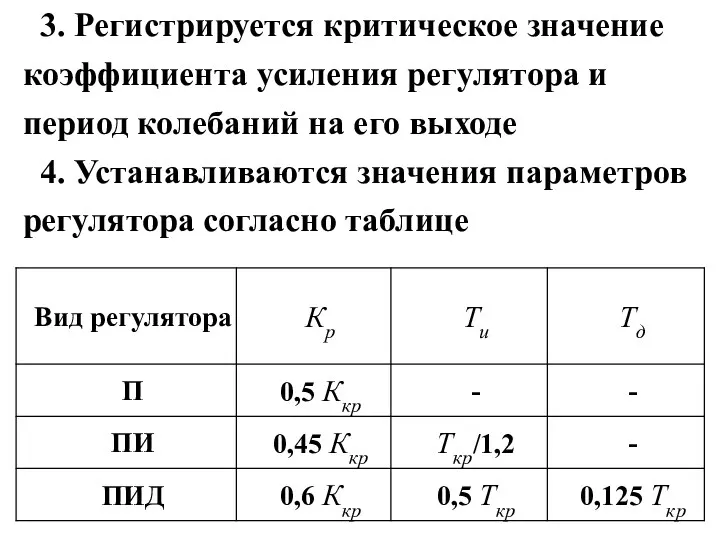
- 70. 3. Регистрируется критическое значение коэффициента усиления регулятора и период колебаний на его выходе 4. Устанавливаются значения
- 71. 5. Строятся переходные характеристики и определяются прямые показатели качества: перерегулирование , время регулирования 6. Если прямые
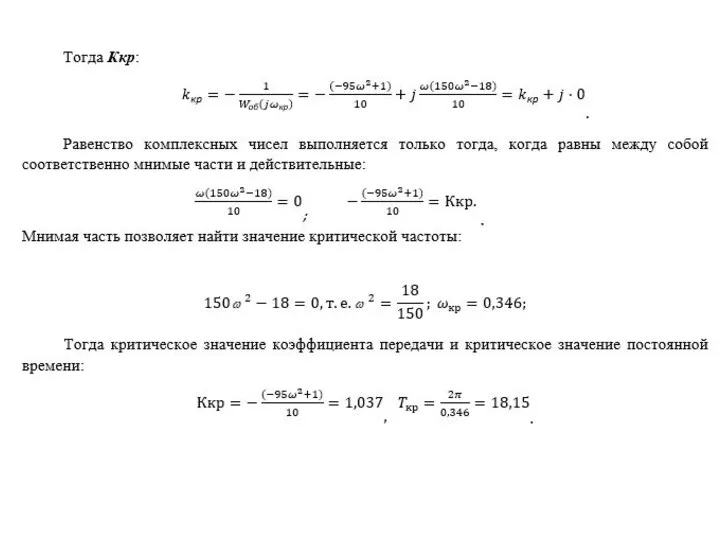
- 72. Аналитический путь определения Ккр Расчет критических значений Критические значения могут быть рассчитаны аналитическим путем на основе
- 73. Система находится на границе устойчивости, если , тогда Далее определяется последовательно
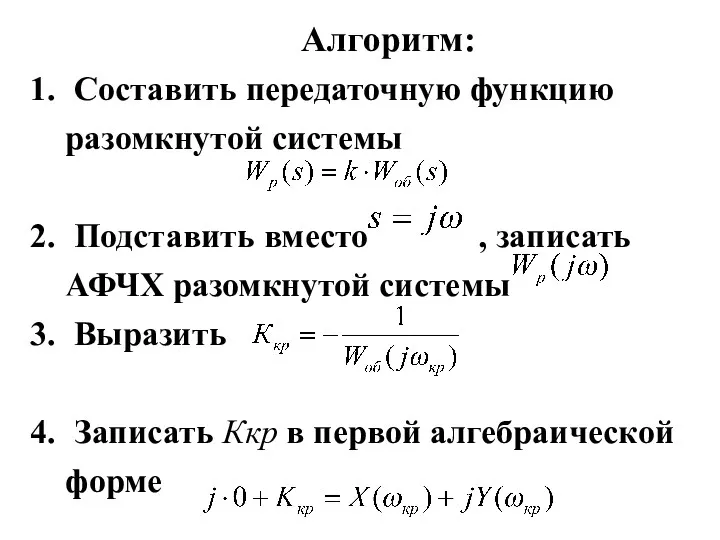
- 74. Алгоритм: Составить передаточную функцию разомкнутой системы Подставить вместо , записать АФЧХ разомкнутой системы Выразить Записать Ккр
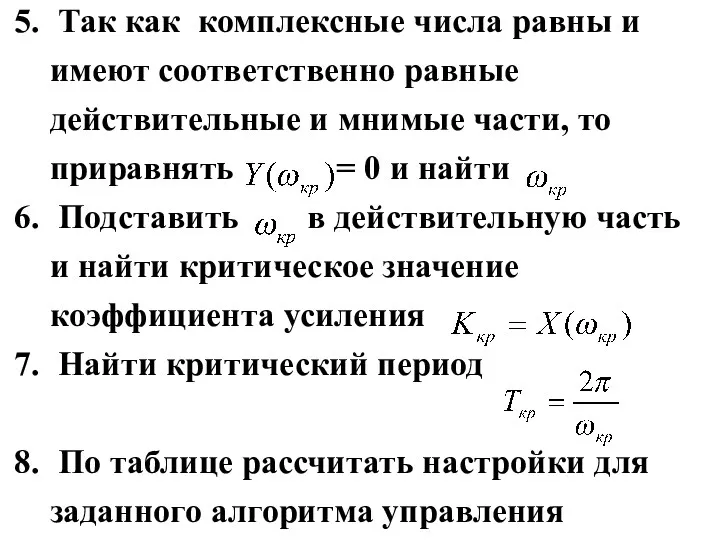
- 75. Так как комплексные числа равны и имеют соответственно равные действительные и мнимые части, то приравнять =
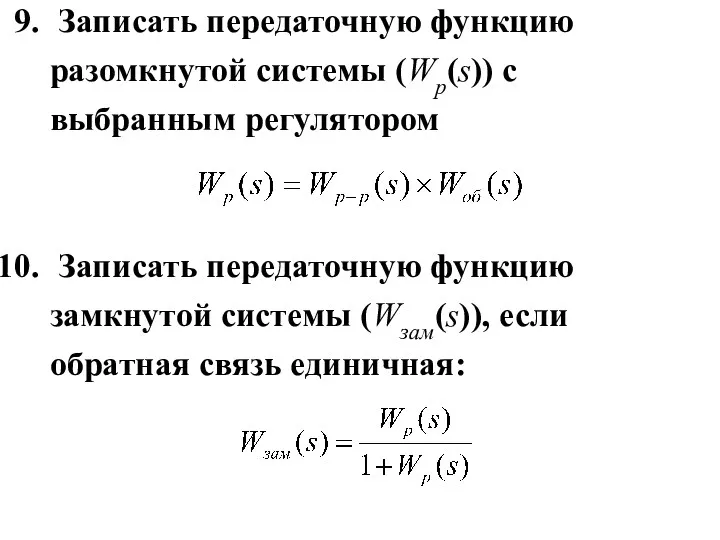
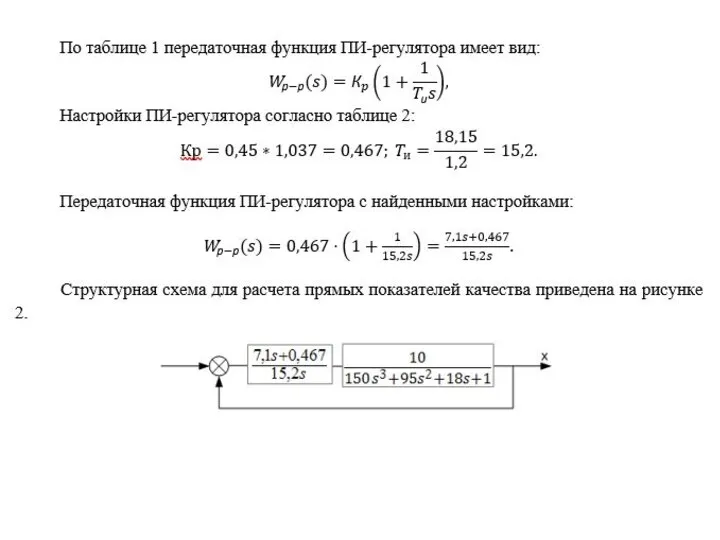
- 76. Записать передаточную функцию разомкнутой системы (Wp(s)) с выбранным регулятором Записать передаточную функцию замкнутой системы (Wзам(s)), если
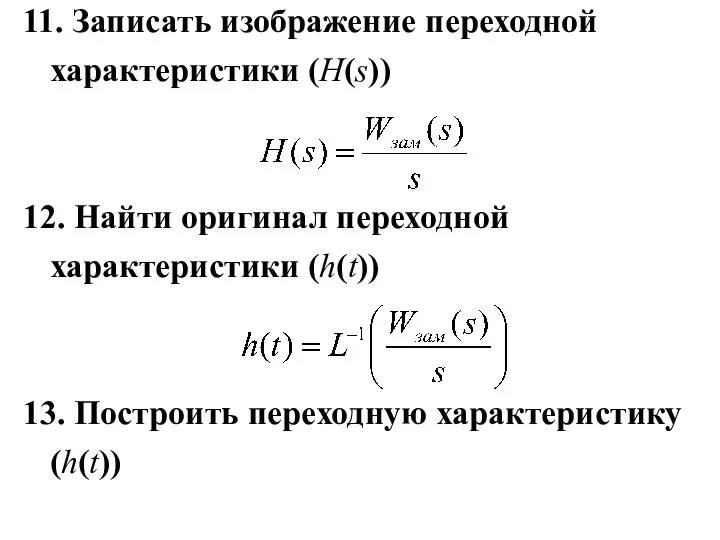
- 77. 11. Записать изображение переходной характеристики (H(s)) 12. Найти оригинал переходной характеристики (h(t)) 13. Построить переходную характеристику
- 78. 14. Определить прямые показатели качества (время регулирования (tр)) при ; (перерегулирование ).
- 79. Недостаток метода: Если в системе имеется запаздывание (множитель ), то результат настройки в значительной степени зависит
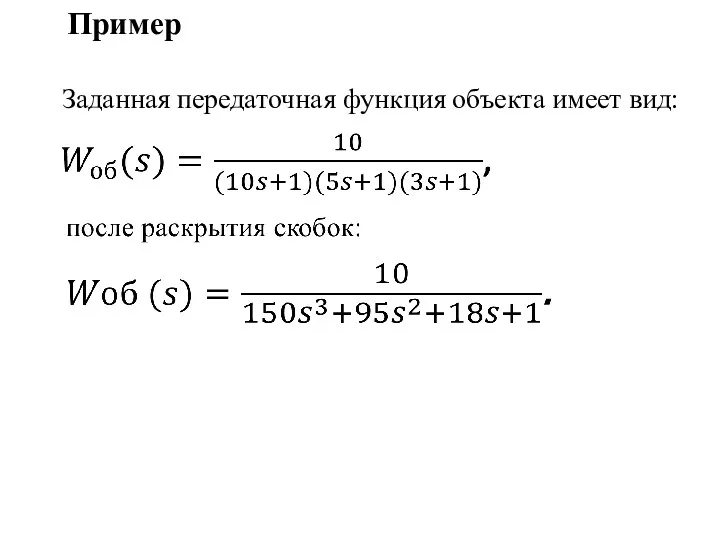
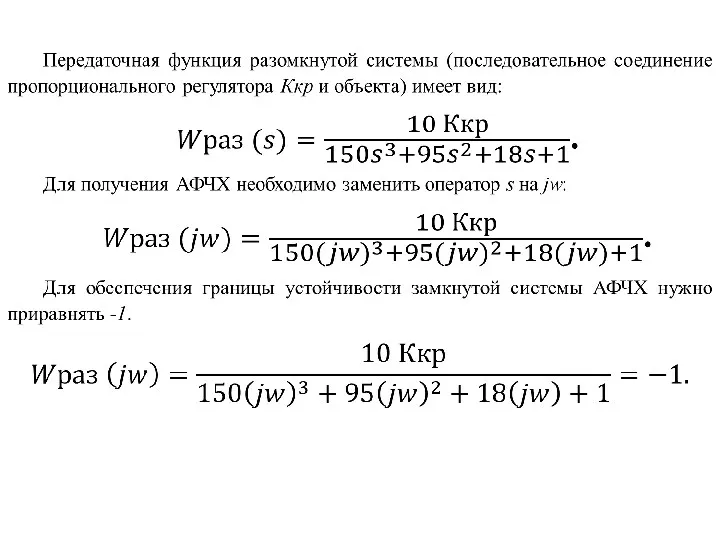
- 80. Пример Заданная передаточная функция объекта имеет вид:
- 85. Скачать презентацию
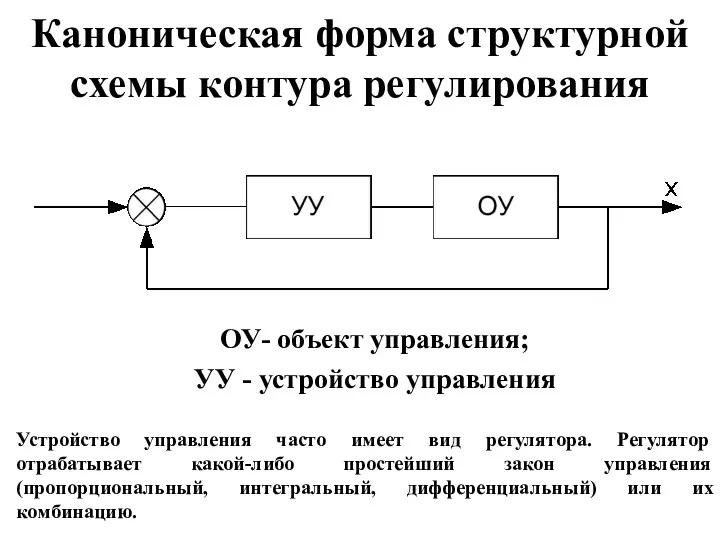
Каноническая форма структурной схемы контура регулирования
ОУ- объект управления;
УУ - устройство управления
Устройство
Каноническая форма структурной схемы контура регулирования
ОУ- объект управления;
УУ - устройство управления
Устройство
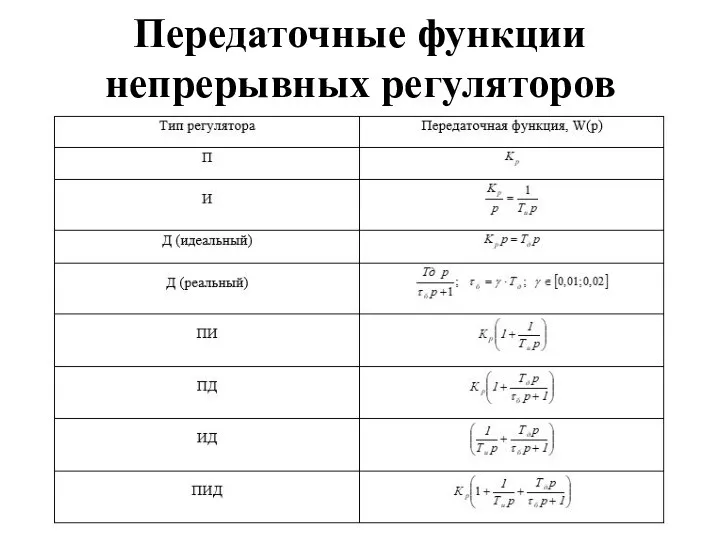
Передаточные функции непрерывных регуляторов
Передаточные функции непрерывных регуляторов
Цель и критерии расчета контуров регулирования
Параметры регуляторов: коэффициент передачи Кр; постоянная
Цель и критерии расчета контуров регулирования
Параметры регуляторов: коэффициент передачи Кр; постоянная

Запас устойчивости
Im
h
(-1; j0)
Re
Определяется по критерию Найквиста как расстояние от точки пересечения
Запас устойчивости
Im
h
(-1; j0)
Re
Определяется по критерию Найквиста как расстояние от точки пересечения
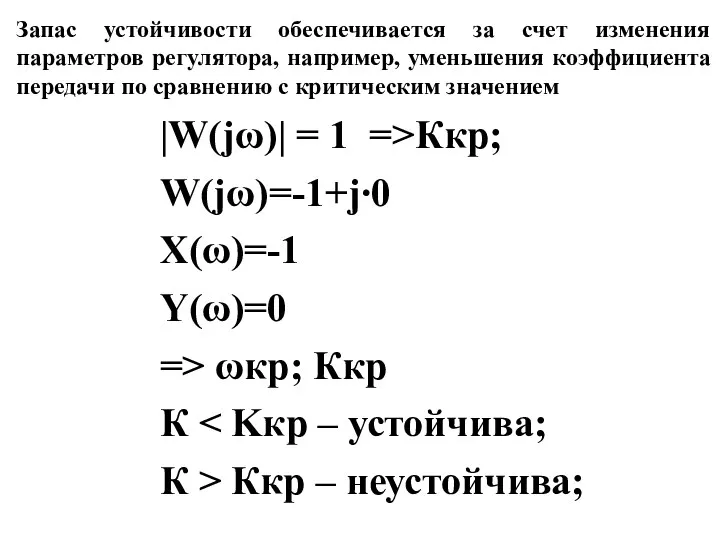
|W(jω)| = 1 =>Ккр;
W(jω)=-1+j∙0
X(ω)=-1
Y(ω)=0
=> ωкр; Ккр
К < Kкр – устойчива;
К >
|W(jω)| = 1 =>Ккр;
W(jω)=-1+j∙0
X(ω)=-1
Y(ω)=0
=> ωкр; Ккр
К < Kкр – устойчива;
К >
Качество управления
в установившемся
режиме (точность, оценивается статической ошибкой)
в неустановившемся
режиме (переходном
режиме)
Качество управления
в установившемся
режиме (точность, оценивается статической ошибкой)
в неустановившемся
режиме (переходном
режиме)
Статическая ошибка исключается применением интегрального звена.
Правило: Для устранения статической ошибки интегрирующий
Статическая ошибка исключается применением интегрального звена.
Правило: Для устранения статической ошибки интегрирующий
Определяются по переходной характеристике.
Прямые показатели качества
Переходная характеристика
(h(t)) – реакция системы
Определяются по переходной характеристике.
Прямые показатели качества
Переходная характеристика
(h(t)) – реакция системы
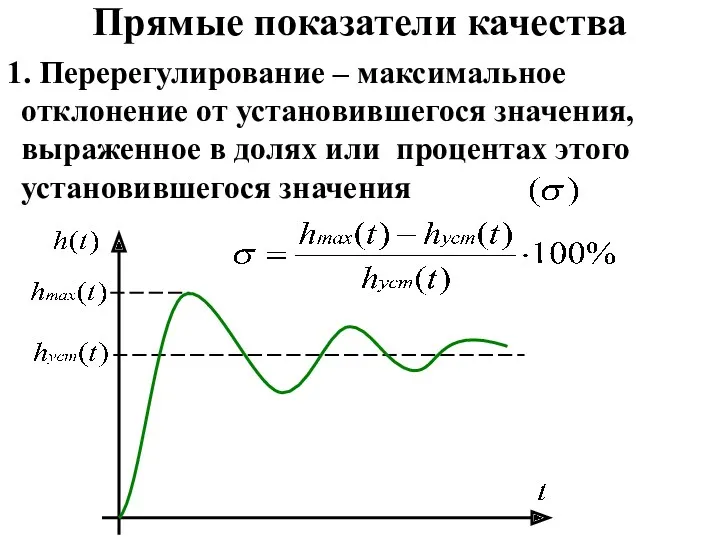
Прямые показатели качества
1. Перерегулирование – максимальное отклонение от установившегося значения, выраженное
Прямые показатели качества
1. Перерегулирование – максимальное отклонение от установившегося значения, выраженное
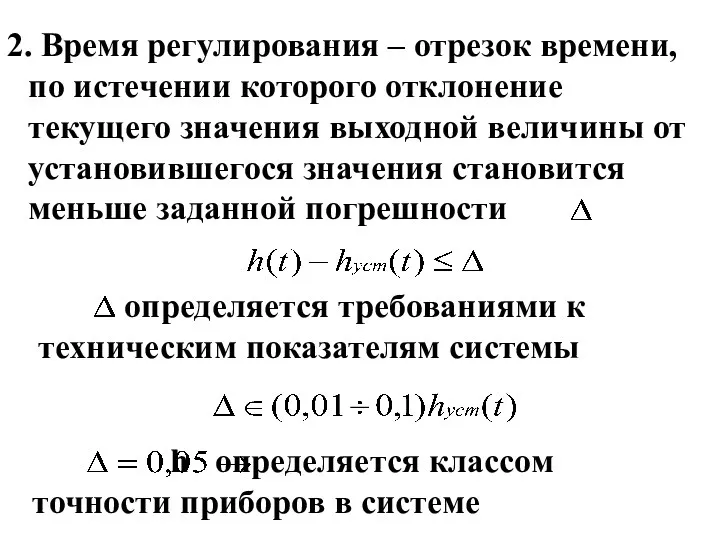
2. Время регулирования – отрезок времени, по истечении которого отклонение текущего
2. Время регулирования – отрезок времени, по истечении которого отклонение текущего
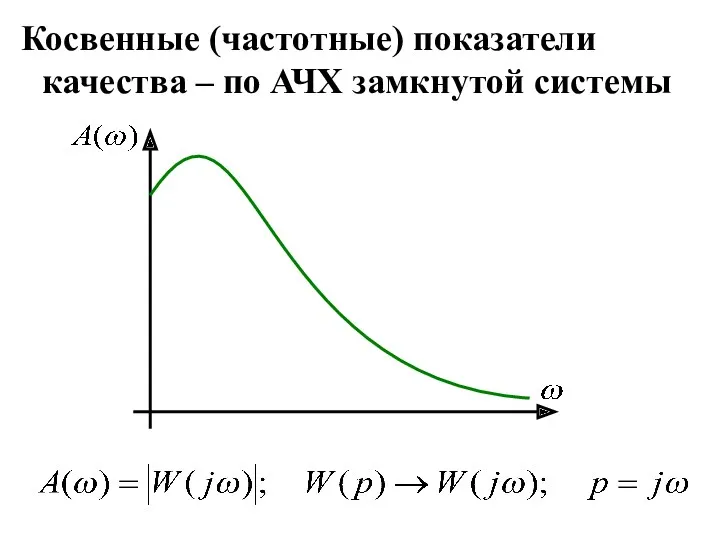
Косвенные (частотные) показатели качества – по АЧХ замкнутой системы
Косвенные (частотные) показатели качества – по АЧХ замкнутой системы
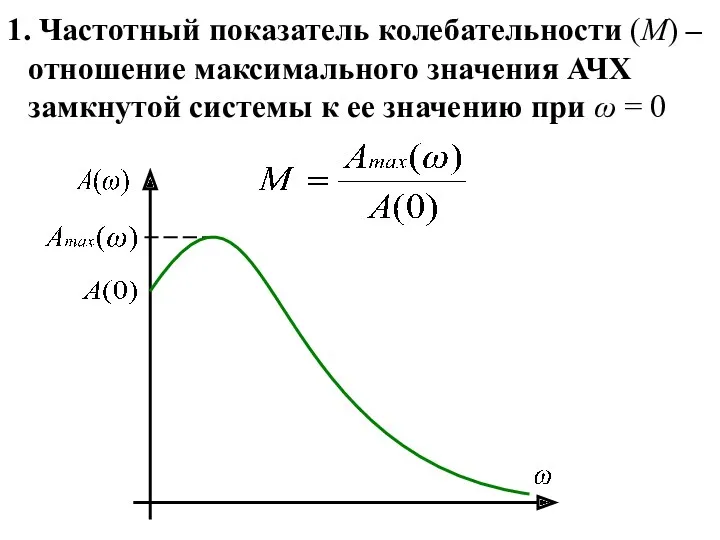
1. Частотный показатель колебательности (M) – отношение максимального значения АЧХ замкнутой
1. Частотный показатель колебательности (M) – отношение максимального значения АЧХ замкнутой
Канонический алгоритм расчета настроек регуляторов
Алгоритм расчета настроек регуляторов для объекта, заданного
Канонический алгоритм расчета настроек регуляторов
Алгоритм расчета настроек регуляторов для объекта, заданного
Задание целевых характеристик
Необходимые показатели качества в контуре задаются в техническом регламенте.
Задание целевых характеристик
Необходимые показатели качества в контуре задаются в техническом регламенте.
Выбор типа регулятора
Учет свойств объекта;
Учет требований к вектору состояния;
Выбор типа регулятора
Учет свойств объекта;
Учет требований к вектору состояния;
Определение передаточной функции
по кривой отклика
Для определения передаточной функции объекта используются различные
Определение передаточной функции
по кривой отклика
Для определения передаточной функции объекта используются различные
Получение кривой отклика
1. Фиксируется установившееся значение входной и выходной
Получение кривой отклика
1. Фиксируется установившееся значение входной и выходной
Анализ кривой отклика
Если кривая отклика имеет монотонный характер и запаздывание реакции
Анализ кривой отклика
Если кривая отклика имеет монотонный характер и запаздывание реакции

Получение характеристик объекта
по кривой отклика
1. Строится касательная с наибольшим
Получение характеристик объекта
по кривой отклика
1. Строится касательная с наибольшим
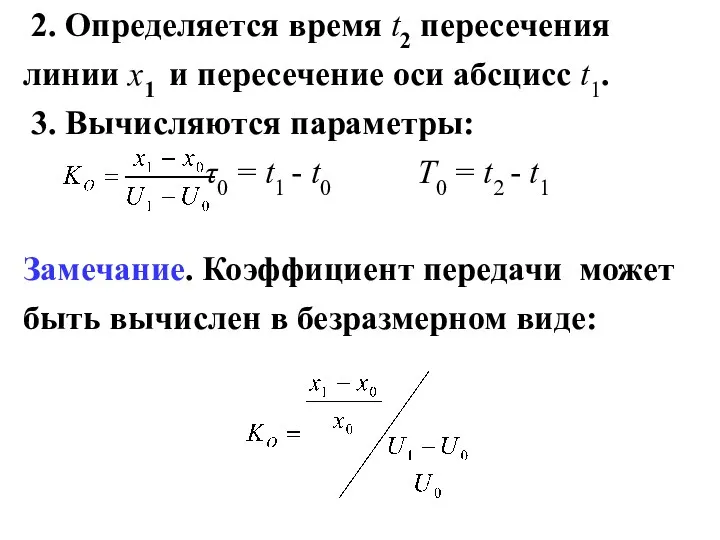
2. Определяется время t2 пересечения линии х1 и пересечение оси
2. Определяется время t2 пересечения линии х1 и пересечение оси
Расчет настроек Зиглера–Никольса
по кривой отклика
1. Задаются определенной скоростью
Расчет настроек Зиглера–Никольса
по кривой отклика
1. Задаются определенной скоростью
Замечание
Перерегулирование и время регулирования в системе в значительной степени зависят от
Замечание
Перерегулирование и время регулирования в системе в значительной степени зависят от
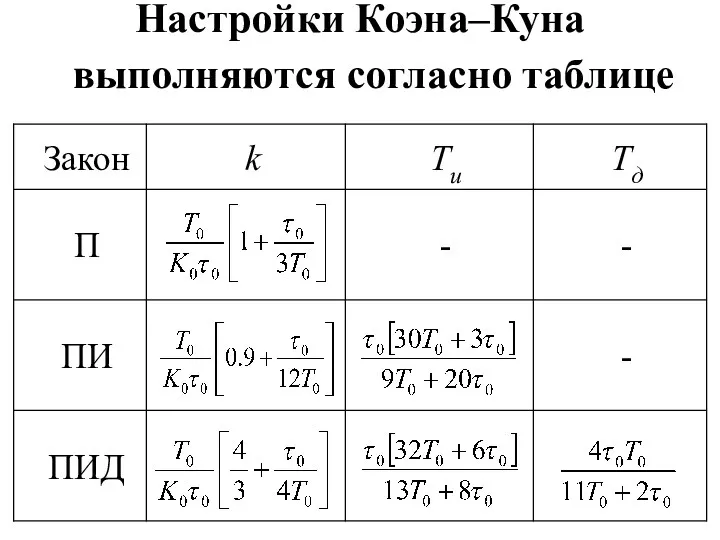
Настройки Коэна–Куна выполняются согласно таблице
Настройки Коэна–Куна выполняются согласно таблице
Графо-аналитический метод
Расчет настроек непрерывных регуляторов по частотному
показателю колебательности
Применяется только при
Графо-аналитический метод
Расчет настроек непрерывных регуляторов по частотному
показателю колебательности
Применяется только при
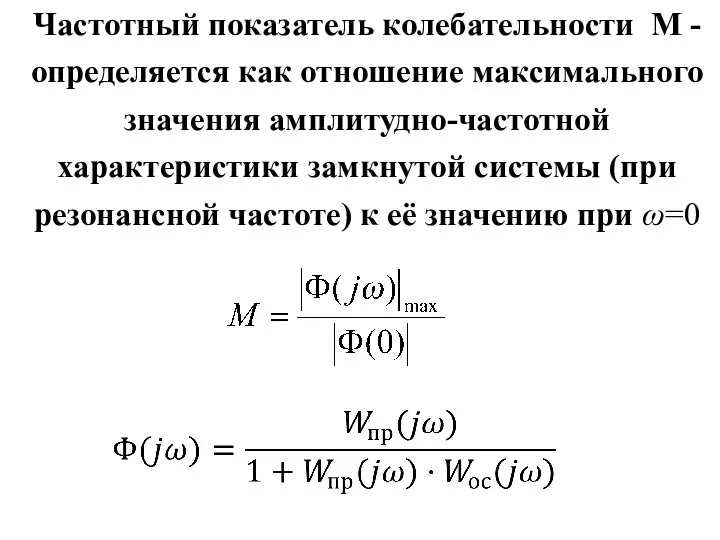
Частотный показатель колебательности М - определяется как отношение максимального значения амплитудно-частотной
Частотный показатель колебательности М - определяется как отношение максимального значения амплитудно-частотной
Если , то
Если разомкнутая система астатическая порядка ν (в
Если , то
Если разомкнутая система астатическая порядка ν (в
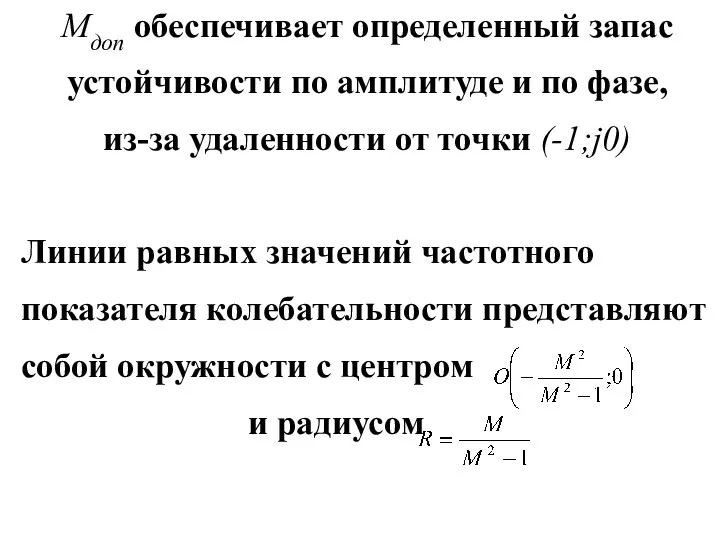
Мдоп обеспечивает определенный запас устойчивости по амплитуде и по фазе,
из-за удаленности
Мдоп обеспечивает определенный запас устойчивости по амплитуде и по фазе,
из-за удаленности
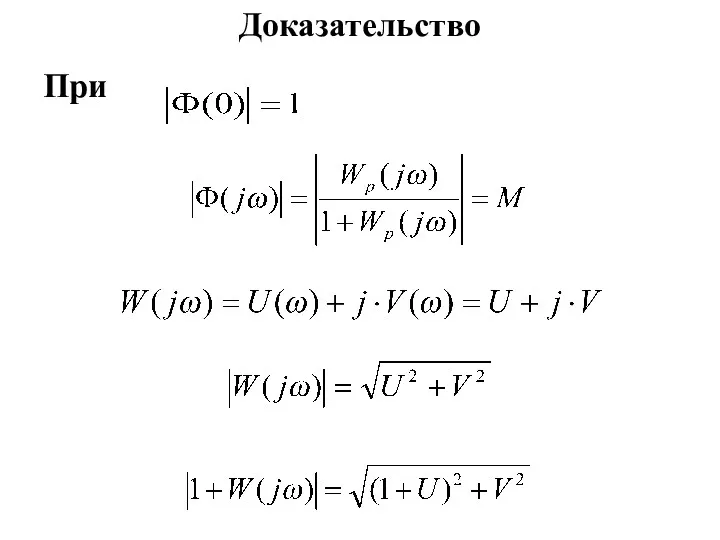
Доказательство
При
Доказательство
При
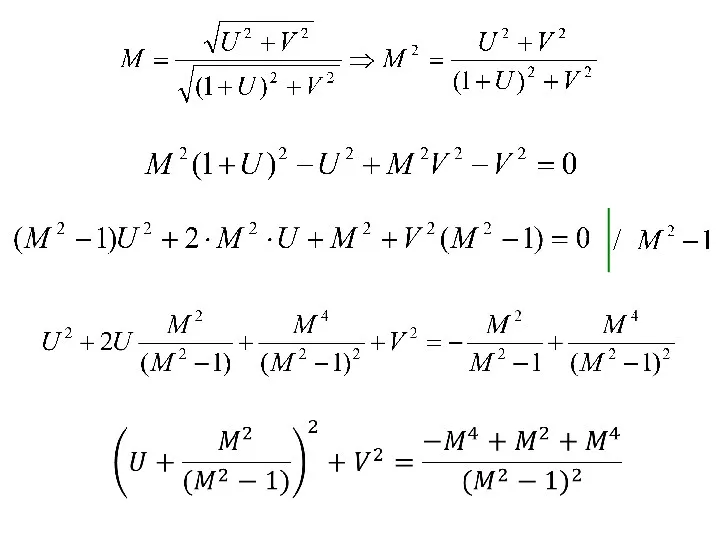
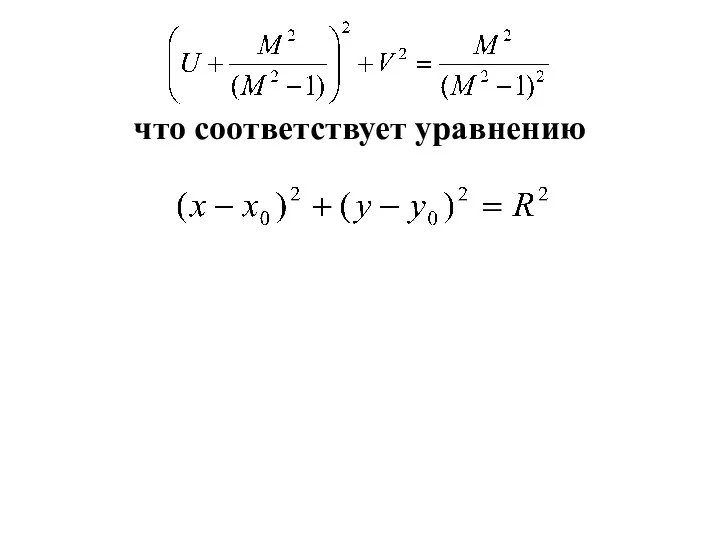
что соответствует уравнению
что соответствует уравнению
Т.к. Частотный показатель колебательности не должен превышать допустимого значения, то АФЧХ
Т.к. Частотный показатель колебательности не должен превышать допустимого значения, то АФЧХ
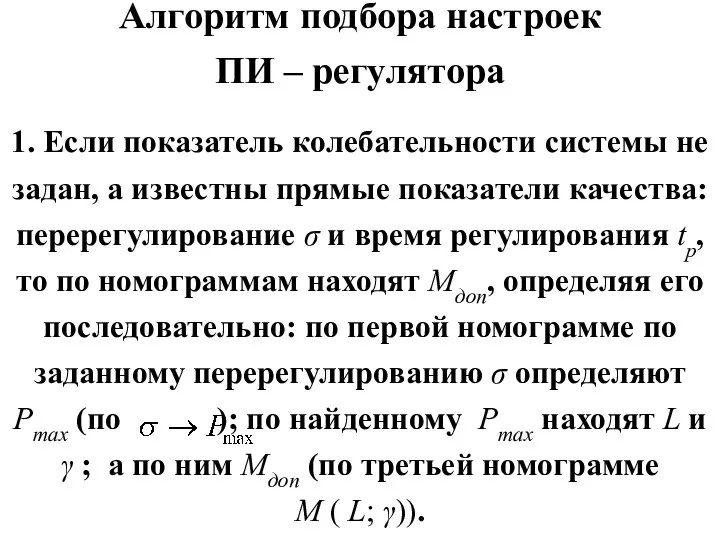
Алгоритм подбора настроек
ПИ – регулятора
1. Если показатель колебательности системы
Алгоритм подбора настроек
ПИ – регулятора
1. Если показатель колебательности системы
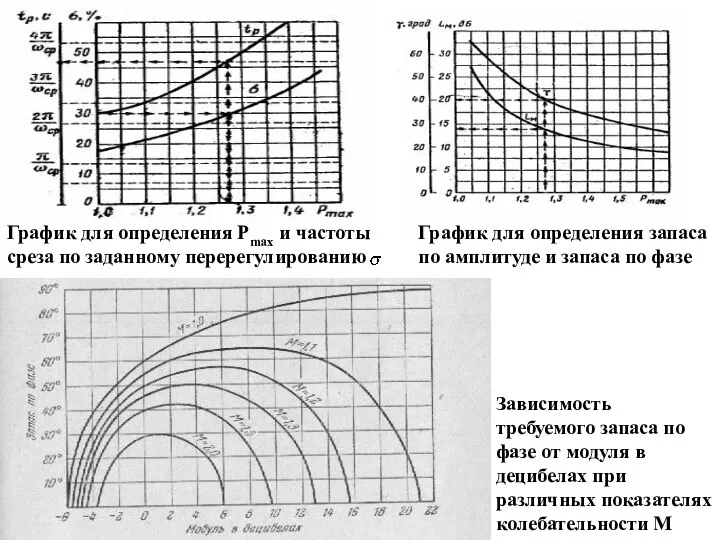
График для определения Pmax и частоты среза по заданному перерегулированию
График
График для определения Pmax и частоты среза по заданному перерегулированию
График
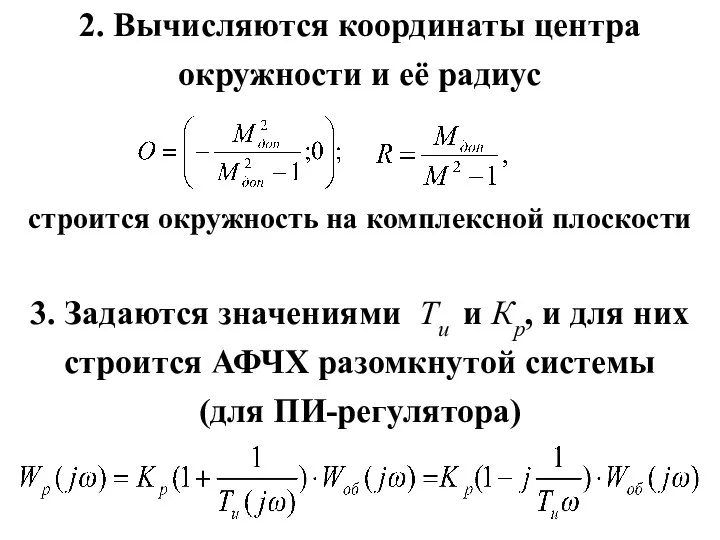
2. Вычисляются координаты центра окружности и её радиус
строится окружность на
2. Вычисляются координаты центра окружности и её радиус
строится окружность на
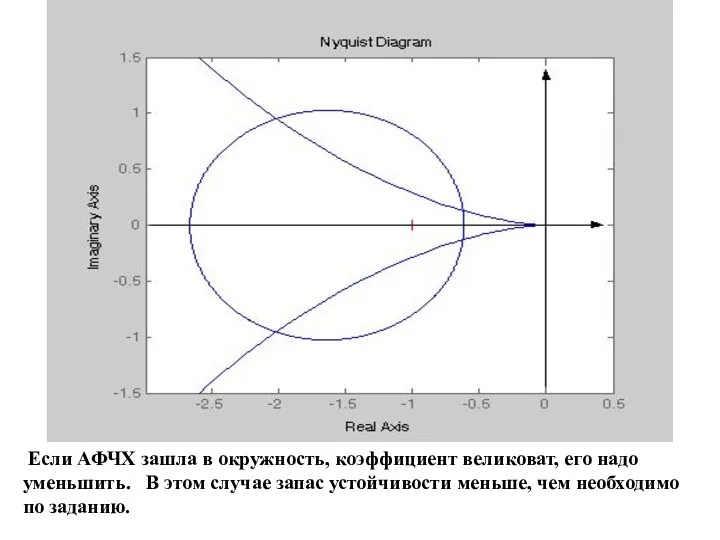
Если АФЧХ зашла в окружность, коэффициент великоват, его надо уменьшить.
Если АФЧХ зашла в окружность, коэффициент великоват, его надо уменьшить.
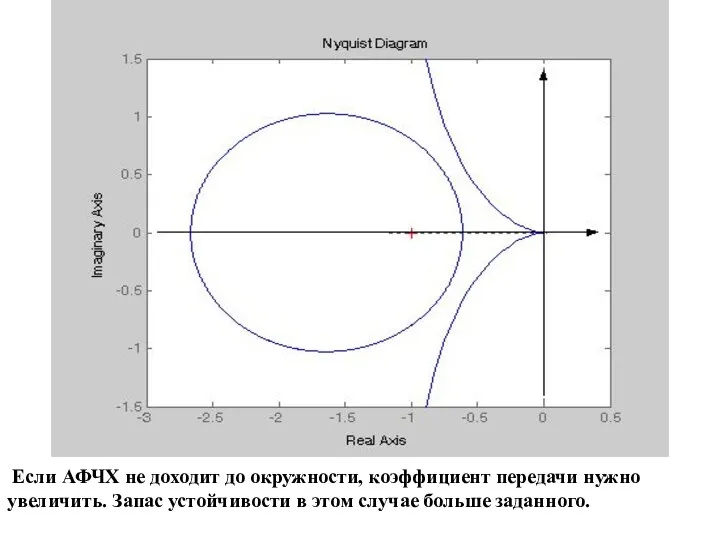
Если АФЧХ не доходит до окружности, коэффициент передачи нужно увеличить.
Если АФЧХ не доходит до окружности, коэффициент передачи нужно увеличить.
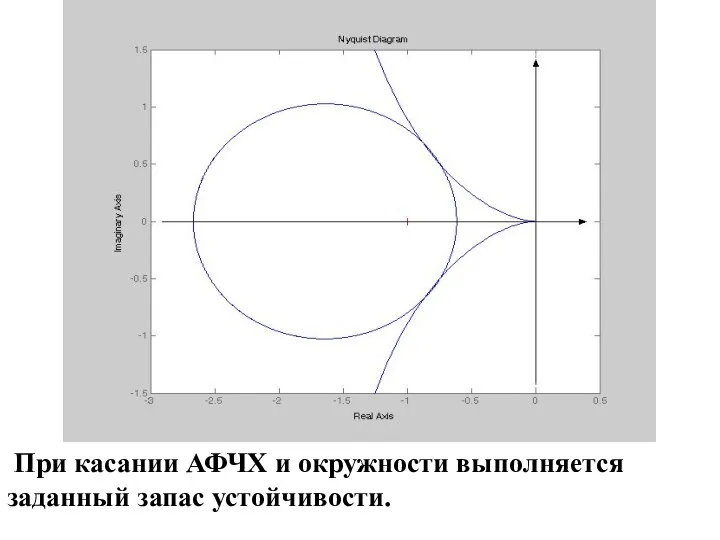
При касании АФЧХ и окружности выполняется заданный запас устойчивости.
При касании АФЧХ и окружности выполняется заданный запас устойчивости.
Если Wp (jω) заходит в окружность, Кр нужно уменьшить (Тu =const),
Если Wp (jω) заходит в окружность, Кр нужно уменьшить (Тu =const),

Все данные заносятся в таблицу
За оптимальные принимаются те настройки,
для которых
Все данные заносятся в таблицу
За оптимальные принимаются те настройки,
для которых
Наибольшее отношение можно определить, анализируя последний столбец таблицы.
Вблизи наибольшего отношения
Наибольшее отношение можно определить, анализируя последний столбец таблицы.
Вблизи наибольшего отношения
Из опыта известно, что оптимальные настройки не должны значительно отличаться от
Из опыта известно, что оптимальные настройки не должны значительно отличаться от
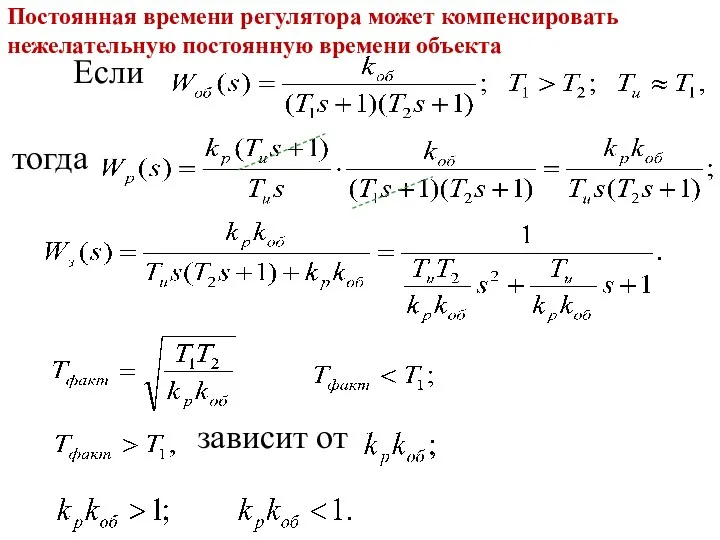
зависит от
тогда
Если
Постоянная времени регулятора может компенсировать нежелательную постоянную времени объекта
зависит от
тогда
Если
Постоянная времени регулятора может компенсировать нежелательную постоянную времени объекта
7. Проверяется фактическое значение частотного показателя колебательности с выбранными настройками. Для
7. Проверяется фактическое значение частотного показателя колебательности с выбранными настройками. Для
7.2. Записывается передаточная функция разомкнутой системы
7.3. Записывается передаточная функция замкнутой системы
7.2. Записывается передаточная функция разомкнутой системы
7.3. Записывается передаточная функция замкнутой системы
7.5 Если фактические значения показателей качества оказались не хуже заданных, то
7.5 Если фактические значения показателей качества оказались не хуже заданных, то
Особенности расчета настроек ПИД–регулятора
1. В регуляторе ПИД–типа настраиваемых параметров уже
Особенности расчета настроек ПИД–регулятора
1. В регуляторе ПИД–типа настраиваемых параметров уже
2. Для применения известного алгоритма расчета настроек ПИ-регулятора вводится параметр ,
2. Для применения известного алгоритма расчета настроек ПИ-регулятора вводится параметр ,
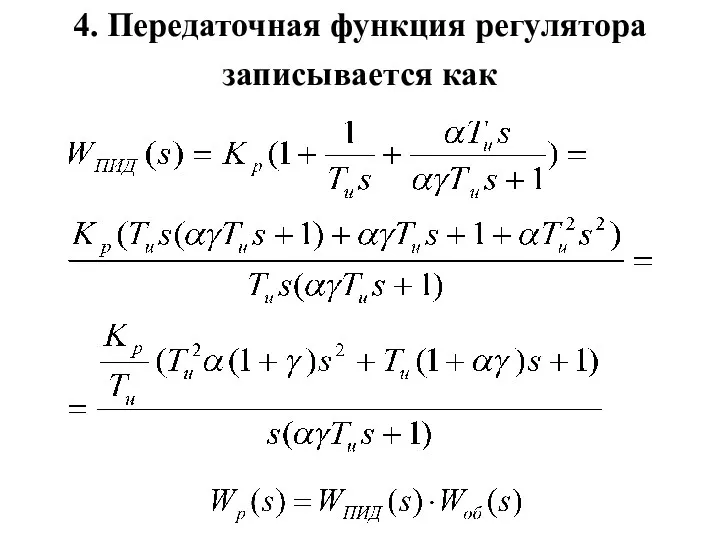
4. Передаточная функция регулятора записывается как
4. Передаточная функция регулятора записывается как
Расчет настроек дискретных регуляторов
В настоящее время устройства управления имеют дискретный характер
Расчет настроек дискретных регуляторов
В настоящее время устройства управления имеют дискретный характер
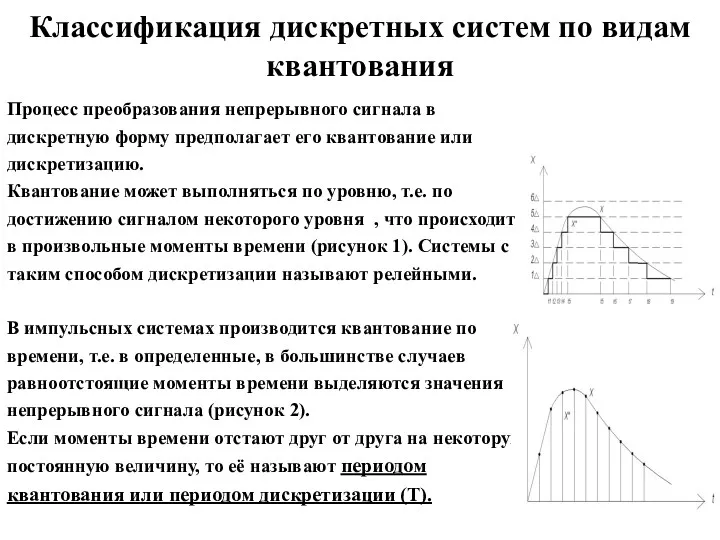
Процесс преобразования непрерывного сигнала в дискретную форму предполагает его квантование или
Процесс преобразования непрерывного сигнала в дискретную форму предполагает его квантование или
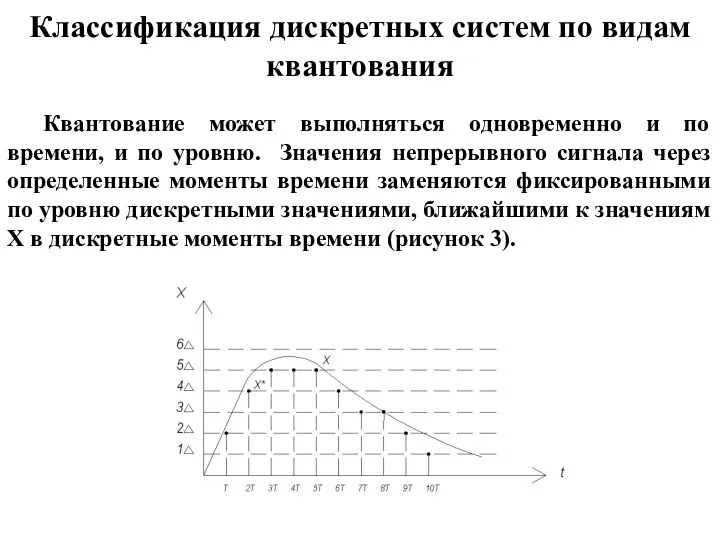
Квантование может выполняться одновременно и по времени, и по уровню. Значения
Квантование может выполняться одновременно и по времени, и по уровню. Значения
Классификация дискретных систем по видам формирования импульсов (модуляция)
АИМ, ШИМ, ФИМ, ЧИМ
Классификация дискретных систем по видам формирования импульсов (модуляция)
АИМ, ШИМ, ФИМ, ЧИМ
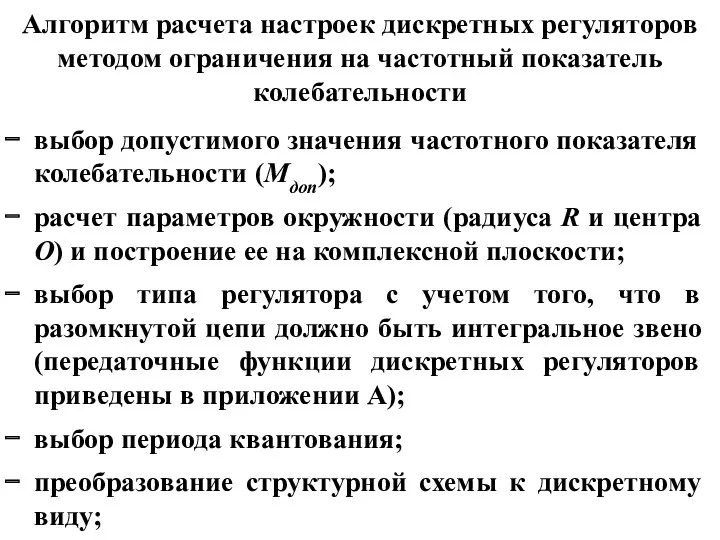
Алгоритм расчета настроек дискретных регуляторов методом ограничения на частотный показатель колебательности
выбор
Алгоритм расчета настроек дискретных регуляторов методом ограничения на частотный показатель колебательности
выбор
построение АФЧХ разомкнутой системы в общем виде;
выбор интервала варьирования постоянной времени
построение АФЧХ разомкнутой системы в общем виде;
выбор интервала варьирования постоянной времени
Данный алгоритм имеет общие шаги с расчетом настроек непрерывных регуляторов. Однако,
Данный алгоритм имеет общие шаги с расчетом настроек непрерывных регуляторов. Однако,
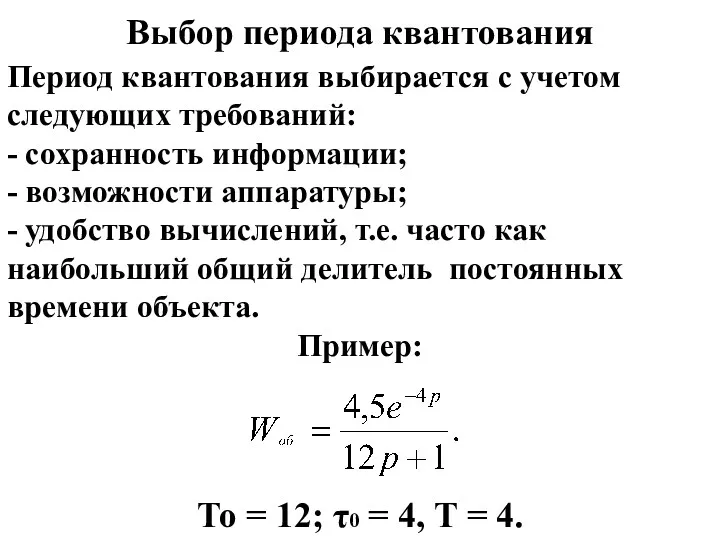
Выбор периода квантования
Период квантования выбирается с учетом следующих требований:
- сохранность информации;
-
Выбор периода квантования
Период квантования выбирается с учетом следующих требований:
- сохранность информации;
-

ИЧ
НЧ
Импульсная часть (как правило УУ)
Импульсное устройство
Функциональные элементы, преобразователи
Построение передаточной функции приведенной
ИЧ
НЧ
Импульсная часть (как правило УУ)
Импульсное устройство
Функциональные элементы, преобразователи
Построение передаточной функции приведенной
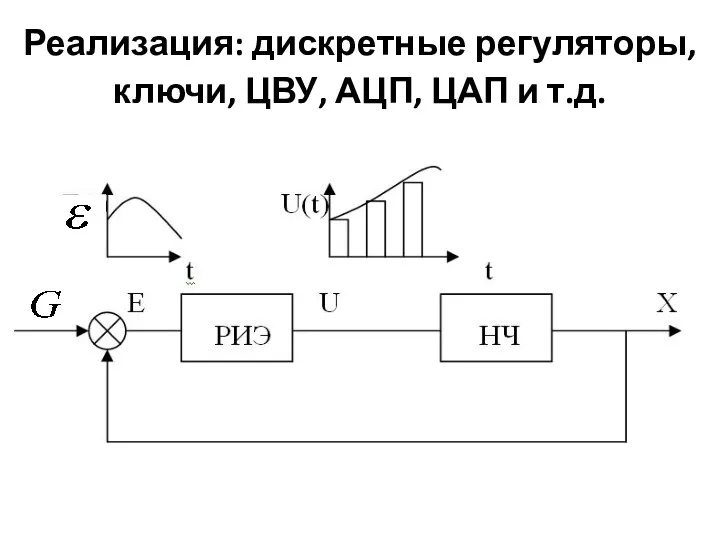
Реализация: дискретные регуляторы, ключи, ЦВУ, АЦП, ЦАП и т.д.
Реализация: дискретные регуляторы, ключи, ЦВУ, АЦП, ЦАП и т.д.
W0(p)
Wнч(p)
Реальный импульсный элемент (ключ) было предложено представлять в виде идеального импульсного
W0(p)
Wнч(p)
Реальный импульсный элемент (ключ) было предложено представлять в виде идеального импульсного
W0(p)
Wнч(p)
Звено чистого
запаздывания
При наличии запаздывания в объекте передаточная функция рассчитывается по формуле,
W0(p)
Wнч(p)
Звено чистого
запаздывания
При наличии запаздывания в объекте передаточная функция рассчитывается по формуле,
Преобразование структурной схемы
Выполняется в следующей последовательности.
Исходная дискретно-непрерывная одноконтурная система
Преобразование структурной схемы
Выполняется в следующей последовательности.
Исходная дискретно-непрерывная одноконтурная система
Преобразование структурной схемы
Структурная схема, иллюстрирующая преобразование непрерывного сигнала
Преобразование структурной схемы
Структурная схема, иллюстрирующая преобразование непрерывного сигнала
Преобразование структурной схемы
Эквивалентная дискретная система
Расчет Z-передаточной функции приведенной непрерывной части может
Преобразование структурной схемы
Эквивалентная дискретная система
Расчет Z-передаточной функции приведенной непрерывной части может
Остальные этапы расчета настроек ПИ или ПИД-регулятора идентичны методу расчета настроек
Остальные этапы расчета настроек ПИ или ПИД-регулятора идентичны методу расчета настроек
Эмпирические методы
Метод Зиглера-Никольса
Используется только для устойчивых объектов
Эмпирические методы
Метод Зиглера-Никольса
Используется только для устойчивых объектов
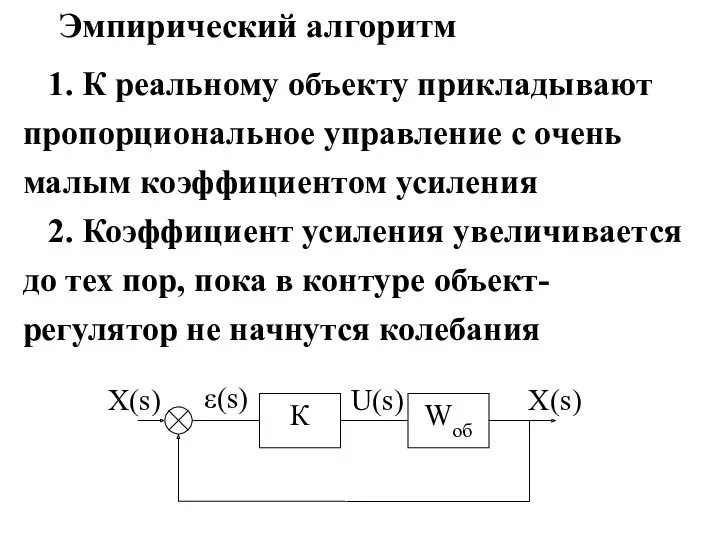
Эмпирический алгоритм
1. К реальному объекту прикладывают пропорциональное управление с очень
Эмпирический алгоритм
1. К реальному объекту прикладывают пропорциональное управление с очень
3. Регистрируется критическое значение коэффициента усиления регулятора и период колебаний
3. Регистрируется критическое значение коэффициента усиления регулятора и период колебаний
5. Строятся переходные характеристики и определяются прямые показатели качества: перерегулирование
5. Строятся переходные характеристики и определяются прямые показатели качества: перерегулирование
Аналитический путь определения Ккр
Расчет критических значений
Критические значения могут
Аналитический путь определения Ккр
Расчет критических значений
Критические значения могут
Система находится на границе устойчивости, если , тогда
Далее определяется
Система находится на границе устойчивости, если , тогда
Далее определяется
Алгоритм:
Составить передаточную функцию разомкнутой системы
Подставить вместо ,
Алгоритм:
Составить передаточную функцию разомкнутой системы
Подставить вместо ,
Так как комплексные числа равны и имеют соответственно равные действительные
Так как комплексные числа равны и имеют соответственно равные действительные
Записать передаточную функцию разомкнутой системы (Wp(s)) с выбранным регулятором
Записать
Записать передаточную функцию разомкнутой системы (Wp(s)) с выбранным регулятором
Записать
11. Записать изображение переходной характеристики (H(s))
12. Найти оригинал переходной характеристики (h(t))
11. Записать изображение переходной характеристики (H(s))
12. Найти оригинал переходной характеристики (h(t))
14. Определить прямые показатели качества (время регулирования (tр)) при ; (перерегулирование
14. Определить прямые показатели качества (время регулирования (tр)) при ; (перерегулирование
Недостаток метода:
Если в системе имеется запаздывание (множитель ), то результат настройки
Недостаток метода:
Если в системе имеется запаздывание (множитель ), то результат настройки
Пример
Заданная передаточная функция объекта имеет вид:
Пример
Заданная передаточная функция объекта имеет вид:
 Автоколебания. Генератор незатухающих электромагнитных колебаний
Автоколебания. Генератор незатухающих электромагнитных колебаний Електротехніка (Лекція 6. Частина 2)
Електротехніка (Лекція 6. Частина 2) Методи та системи неруйнівного контролю
Методи та системи неруйнівного контролю Современные типы космических двигателей
Современные типы космических двигателей Кинематика материальной точки и поступательного движения твердого тела
Кинематика материальной точки и поступательного движения твердого тела Релейная защита и автоматика
Релейная защита и автоматика Плоская система сходящихся сил. Техническая механика
Плоская система сходящихся сил. Техническая механика Раздел 4. Управление колебаниями. Импульсная модуляция
Раздел 4. Управление колебаниями. Импульсная модуляция Обобщение и уточнение Ньютоном законов Кеплера
Обобщение и уточнение Ньютоном законов Кеплера Эксплуатация оборудования для ТО и ТР приборов дизельных систем питания автомобиля (урок 19)
Эксплуатация оборудования для ТО и ТР приборов дизельных систем питания автомобиля (урок 19) Динамика кулисного механизма
Динамика кулисного механизма Техническая диагностика машин. Диагностирование дизельных двигателей
Техническая диагностика машин. Диагностирование дизельных двигателей Применение современных образовательных технологий в обучении физике учащихся с ограниченными возможностями здоровья.
Применение современных образовательных технологий в обучении физике учащихся с ограниченными возможностями здоровья. Зависимость скорости испарения воды от площади поверхности и от ветра. Экспериментальная работа по физике
Зависимость скорости испарения воды от площади поверхности и от ветра. Экспериментальная работа по физике Flexible pipelines
Flexible pipelines Научно-исследовательская работа Холодильник в дорогу. Способ поддержания определенной температуры хранения вне холодильника
Научно-исследовательская работа Холодильник в дорогу. Способ поддержания определенной температуры хранения вне холодильника Реостаты. Последовательное соединение проводников. Параллельное соединение проводников
Реостаты. Последовательное соединение проводников. Параллельное соединение проводников Линзы. Оптические приборы
Линзы. Оптические приборы Физика плазмы
Физика плазмы Влияние груза на посадку и остойчивость
Влияние груза на посадку и остойчивость Расчет установившихся режимов простейших электрических сетей. (Глава 6)
Расчет установившихся режимов простейших электрических сетей. (Глава 6) Презентация к уроку по теме Кристаллы (10класс).
Презентация к уроку по теме Кристаллы (10класс). Фізика в сучасному житті людини
Фізика в сучасному житті людини Электродинамика курсындағы қолданбалы материалдар
Электродинамика курсындағы қолданбалы материалдар Механикалық гармониялық тербелістер. Өшетін тербелістер. Еріксіз тербелістер. Толқындар
Механикалық гармониялық тербелістер. Өшетін тербелістер. Еріксіз тербелістер. Толқындар Основы физики атома. Теория атома водорода по Бору
Основы физики атома. Теория атома водорода по Бору Магнитооптические материалы. Магнитооптические эффекты
Магнитооптические материалы. Магнитооптические эффекты Газовые законы. Решение графических задач на газовые законы
Газовые законы. Решение графических задач на газовые законы