- Основные характеристики грузоподъемных машин

Содержание
- 2. Основные характеристики грузоподъемных машин Грузоподъемность; Скорость перемещений; Высота подъема груза; Вылет (или пролет) стрелы; Масса машины;
- 3. Грибкова Е.В. ГРУЗОПОДЪЁМНОСТЬ – масса номинального рабочего груза, на подъём которого рассчитана машина (кг, т). Значения
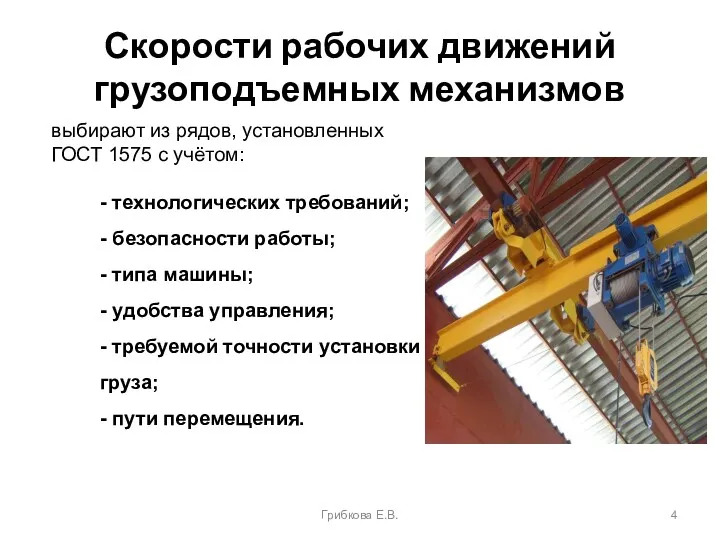
- 4. Скорости рабочих движений грузоподъемных механизмов Грибкова Е.В. выбирают из рядов, установленных ГОСТ 1575 с учётом: -
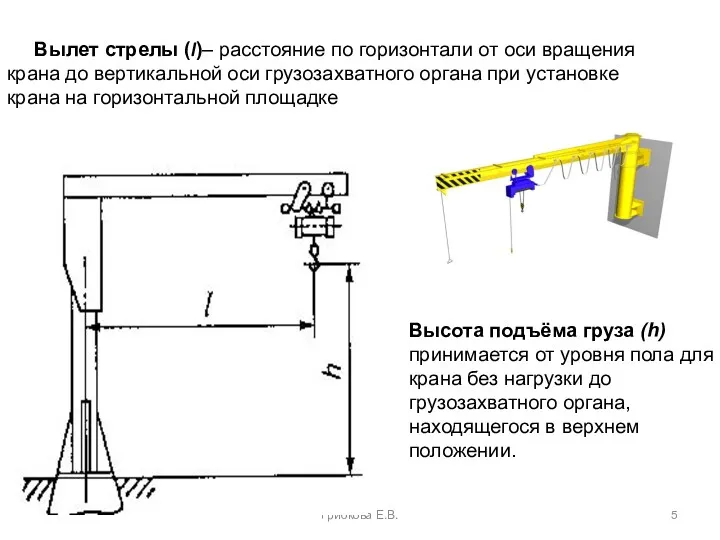
- 5. Грибкова Е.В. Вылет стрелы (l)– расстояние по горизонтали от оси вращения крана до вертикальной оси грузозахватного
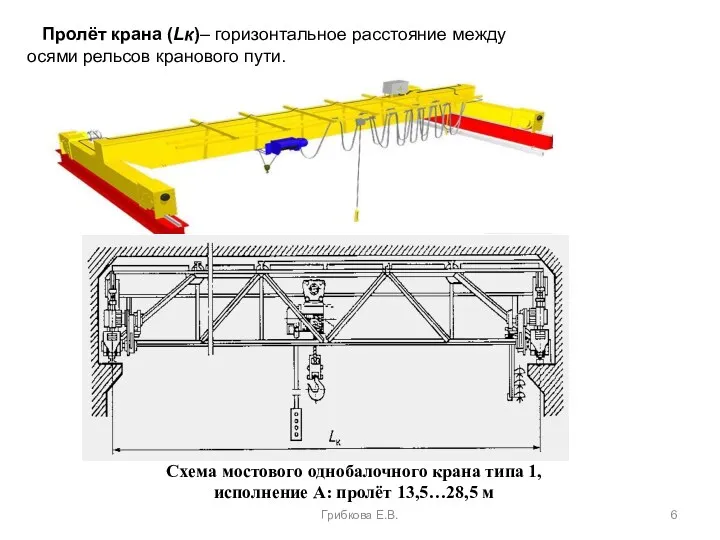
- 6. Грибкова Е.В. Пролёт крана (Lк)– горизонтальное расстояние между осями рельсов кранового пути. Схема мостового однобалочного крана
- 7. Определение группы классификации (режима) кранов и механизмов в целом (ИСО 4301/1). Группа классификации (режима) кранов в
- 8. Число рабочих циклов (число подъемов) где a – число рабочих часов в смену; tц - расчетное
- 9. Расчетное время цикла Определяют исходя из фактических затрат времени на перемещение груза и возврат грузоподъемного органа
- 10. Группы классификации (режима) кранов в целом (ИСО 4301/1)
- 11. Группа классификации (режима) механизмов определяется классом использования механизма (Т0 – Т9) и его режимом нагружения (L1
- 12. Класс использования механизма отражает интенсивность его использования во время эксплуатации (Т) где Т0 – среднесуточное время
- 13. Определение коэффициента распределения нагрузки Кm где ti – средняя продолжительность использования механизма при частных уровнях нагрузки
- 14. Группы классификации (режима) механизмов в целом
- 15. Типовые крановые механизмы Механизм подъема в виде лебедки в комбинации с полиспастом; Механизм передвижения, который производит
- 17. Привод кранового механизма может быть от двигателя (парового, пневматического, внутреннего сгорания, гидравлического, электрического) или ручной. Наибольшее
- 18. Типовые крановые механизмы
- 19. Рабочий орган механизма – элемент, непосредственно осуществляющий рабочий процесс механизма. В механизмах подъема рабочим органом является
- 21. МЕХАНИЗМЫ ПОДЪЕМА ГРУЗОВ. УСТРОЙСТВО И РАСЧЕТ По характеру привода механизмы подъема могут быть разделены на механизмы
- 22. Механизм подъема Грузозахватное устройство; Гибкий орган; Полиспаст; Барабан; Передаточный механизм; Двигатель; Тормозное устройство Грибкова Е.В.
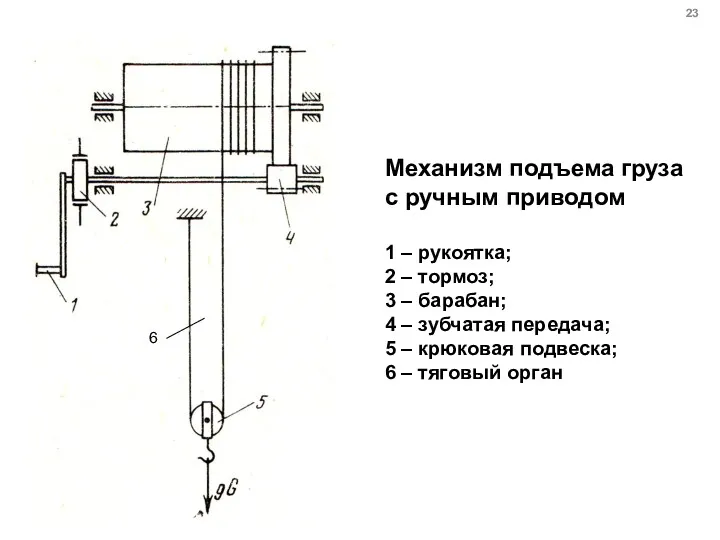
- 23. Механизм подъема груза с ручным приводом 1 – рукоятка; 2 – тормоз; 3 – барабан; 4
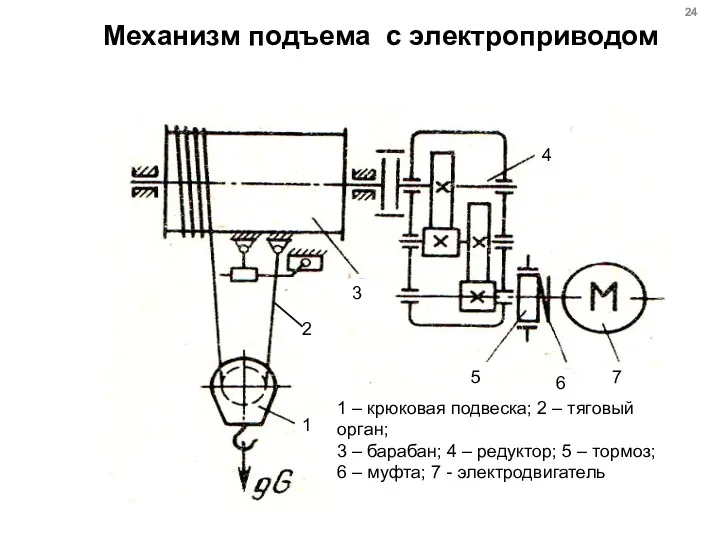
- 24. 1 – крюковая подвеска; 2 – тяговый орган; 3 – барабан; 4 – редуктор; 5 –
- 25. Исходные данные для проектирования механизма подъема: грузоподъемность, т; высота подъема груза, м; скорость подъема груза, м/с;
- 26. Алгоритм расчета механизма подъема Выбирают грузозахватный орган. Выбирают по грузоподъемности тип крюковой подвески и кратность полиспаста.
- 27. Грибкова Е.В.
- 28. Грибкова Е.В.
- 29. Грибкова Е.В.
- 30. Грибкова Е.В.
- 31. СТАЛЬНЫЕ КАНАТЫ а – одинарной свивки; б – двойной свивки; в – тройной свивки; г –
- 32. Все канаты стандартизованы. В грузоподъемных машинах с.-х. назначения при однослойной навивке на барабан и нарезанных канавках
- 33. НАИБОЛЬШЕЕ НАТЯЖЕНИЕ ТЯГОВОЙ ВЕТВИ КАНАТА где G – сила тяжести поднимаемого груза, Н; G = Qg;
- 34. Грибкова Е.В.
- 35. ПОЛИСПАСТЫ ПОЛИСПАСТ – система подвижных и неподвижных блоков, соединенных гибкой связью (канатом). а – силовые (для
- 36. СХЕМЫ ПОЛИСПАСТОВ ПРЯМОГО ДЕЙСТВИЯ а – одинарные; б – сдвоенные Одинарные полиспасты применяют в поворотных кранах.
- 37. Грибкова Е.В.
- 38. ГРУЗОЗАХВАТНЫЕ ОРГАНЫ УНИВЕРСАЛЬНЫЕ: крюки однорогие и двурогие; грузовые петли СПЕЦИАЛЬНЫЕ: ковши; захваты; грейферы; электромагниты
- 39. крюки: а) однорогие б) двурогие грузовые петли: а) цельнокованные б) составные Грузозахватные органы
- 40. Захват груза стропами Грузозахватные органы
- 41. Крюковая подвеска Грузозахватные органы
- 42. Ковши для зачистных и погрузочных работ Ковши обратных лопат Грузозахватные органы
- 43. Схема работы двухканатного грейфера 1 – челюсти; 2 – тяги; 3 – верхняя головка; 4 –
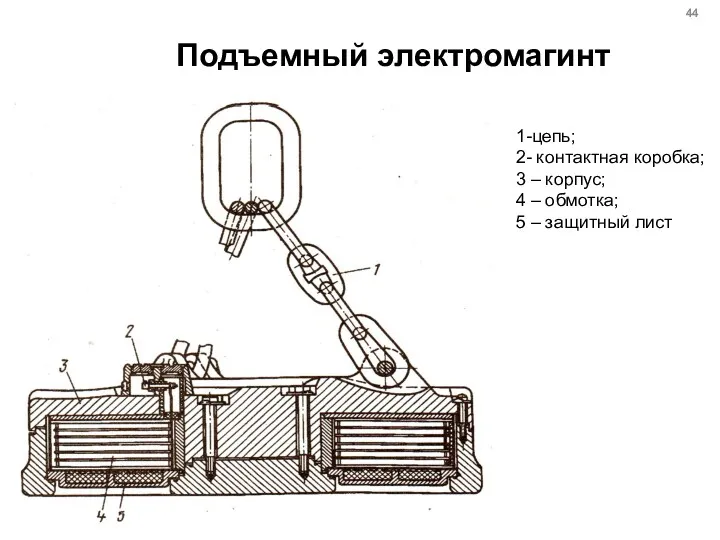
- 44. Подъемный электромагинт 1-цепь; 2- контактная коробка; 3 – корпус; 4 – обмотка; 5 – защитный лист
- 45. Грибкова Е.В. Сварной гладкий барабан для многослойной навивки Литой нарезной барабан для однослойной навивки
- 46. Грибкова Е.В.
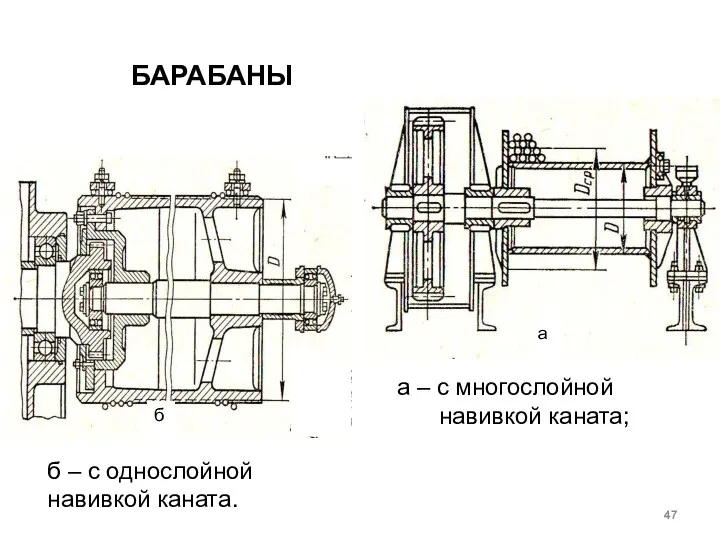
- 47. БАРАБАНЫ а – с многослойной навивкой каната; б – с однослойной навивкой каната.
- 48. ПРОФИЛЬ КАНАВКИ ДЛЯ КАНАТА ПРИ ОДНОСЛОЙНОЙ НАВИВКЕ t = dкан + (2…3 мм) – шаг нарезки
- 49. Определение рабочей длины барабана при однослойной навивке канатов Общее число витков на барабане Z = Zp
- 50. Расчет барабана на прочность Стенки барабана испытывают напряжения сжатия, кручения и изгиба. При Lб ≤ 3D1
- 51. Крепление каната на барабане а – наружными планками; б – прижатой планкой; в – клиновое крепление.
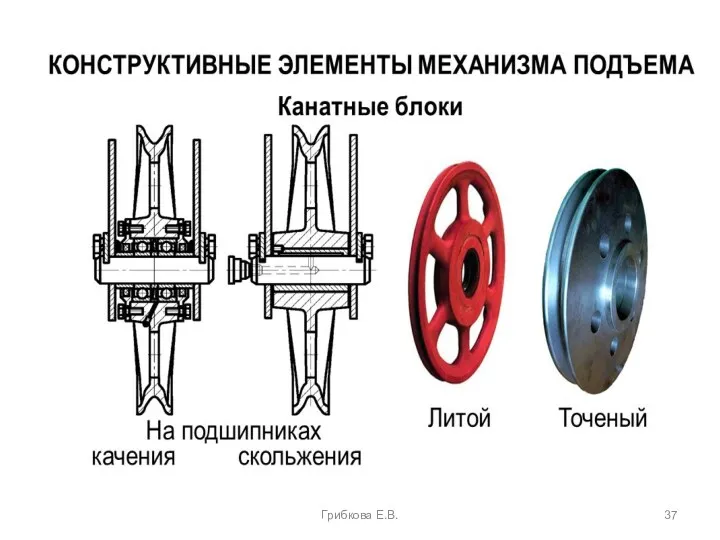
- 52. Конструкции блока в сборе а – на подшипниках качения; б – на подшипниках скольжения
- 53. Профиль ручья блока D2 ≥ h2 dкан D3 ≥ h3 dкан D3 , D3 – диаметры
- 54. Схемы к определению допустимых углов набегания каната на барабан Для барабанов с винтовой канавкой: Для гладких
- 55. РАСЧЕТ РУЧНОГО ПРИВОДА МЕХАНИЗМА ПОДЪЕМА R Момент сопротивления на грузовом барабане, Нм. Момент, развиваемый рабочим, Нм.
- 56. ЭЛЕКТРОДВИГАТЕЛИ ДЛЯ МЕХАНИЗМОВ ПОДЪЕМА В механизмах подъема используют крановые электродвигатели: переменного тока серии МТК с короткозамкнутым
- 57. Электродвигатели серии МТ Их недостатки: имеют большую массу, габаритные размеры и стоимость; они сложнее в устройстве
- 58. Подбор электродвигателей для механизма подъема Подбирают по статической мощности, необходимой для подъема максимального груза где G
- 59. Проверка электродвигателей по условиям пуска При невыгодном сочетании нагрузок и падении напряжения в сети на 15%
- 61. Скачать презентацию
Основные характеристики грузоподъемных машин
Грузоподъемность;
Скорость перемещений;
Высота подъема груза;
Вылет (или пролет) стрелы;
Масса
Основные характеристики грузоподъемных машин
Грузоподъемность;
Скорость перемещений;
Высота подъема груза;
Вылет (или пролет) стрелы;
Масса

Грибкова Е.В.
ГРУЗОПОДЪЁМНОСТЬ – масса номинального рабочего груза, на подъём которого рассчитана
Грибкова Е.В.
ГРУЗОПОДЪЁМНОСТЬ – масса номинального рабочего груза, на подъём которого рассчитана
Скорости рабочих движений грузоподъемных механизмов
Грибкова Е.В.
выбирают из рядов, установленных ГОСТ 1575
Скорости рабочих движений грузоподъемных механизмов
Грибкова Е.В.
выбирают из рядов, установленных ГОСТ 1575
Грибкова Е.В.
Вылет стрелы (l)– расстояние по горизонтали от оси вращения
Грибкова Е.В.
Вылет стрелы (l)– расстояние по горизонтали от оси вращения
Грибкова Е.В.
Пролёт крана (Lк)– горизонтальное расстояние между осями рельсов кранового
Грибкова Е.В.
Пролёт крана (Lк)– горизонтальное расстояние между осями рельсов кранового
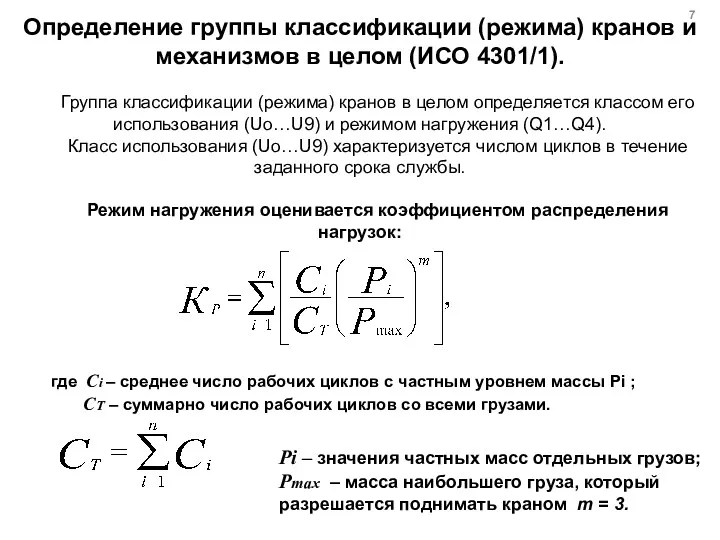
Определение группы классификации (режима) кранов и механизмов в целом (ИСО 4301/1).
Группа
Определение группы классификации (режима) кранов и механизмов в целом (ИСО 4301/1). Группа
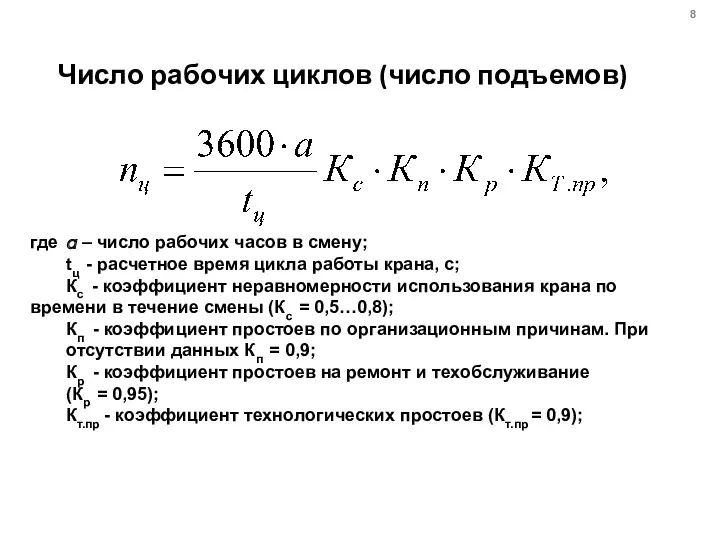
Число рабочих циклов (число подъемов)
где a – число рабочих часов в
Число рабочих циклов (число подъемов)
где a – число рабочих часов в
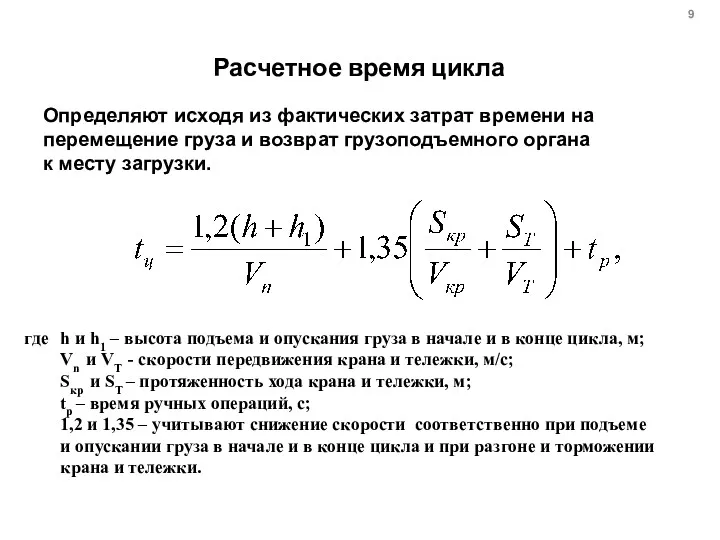
Расчетное время цикла
Определяют исходя из фактических затрат времени на перемещение груза
Расчетное время цикла
Определяют исходя из фактических затрат времени на перемещение груза

Группы классификации (режима) кранов
в целом (ИСО 4301/1)
Группы классификации (режима) кранов
в целом (ИСО 4301/1)
Группа классификации (режима) механизмов определяется классом использования механизма (Т0 – Т9)
Группа классификации (режима) механизмов определяется классом использования механизма (Т0 – Т9)
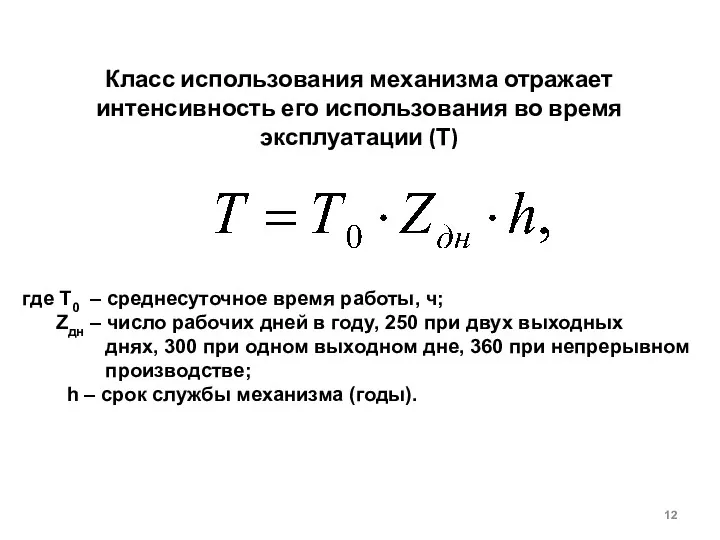
Класс использования механизма отражает интенсивность его использования во время эксплуатации (Т)
где
Класс использования механизма отражает интенсивность его использования во время эксплуатации (Т)
где
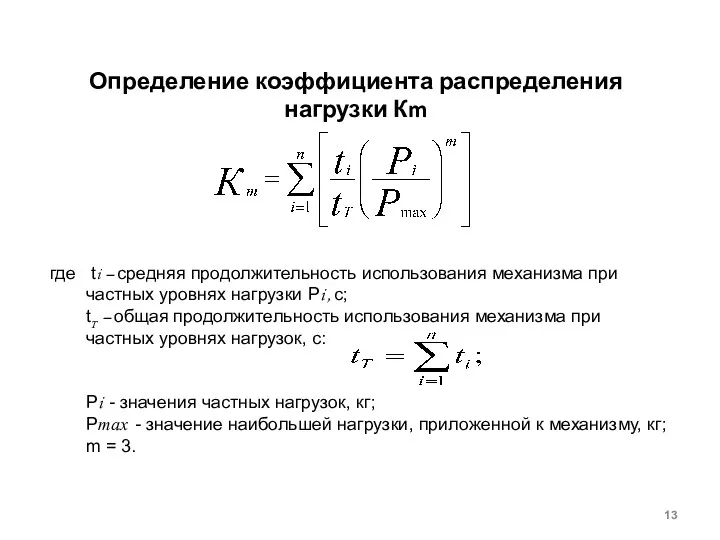
Определение коэффициента распределения нагрузки Кm
где ti – средняя продолжительность использования механизма
Определение коэффициента распределения нагрузки Кm
где ti – средняя продолжительность использования механизма

Группы классификации (режима) механизмов в целом
Группы классификации (режима) механизмов в целом
Типовые крановые механизмы
Механизм подъема в виде лебедки в комбинации с полиспастом;
Типовые крановые механизмы
Механизм подъема в виде лебедки в комбинации с полиспастом;
Привод кранового механизма может быть от двигателя (парового, пневматического, внутреннего сгорания,
Привод кранового механизма может быть от двигателя (парового, пневматического, внутреннего сгорания,

Типовые крановые механизмы
Типовые крановые механизмы
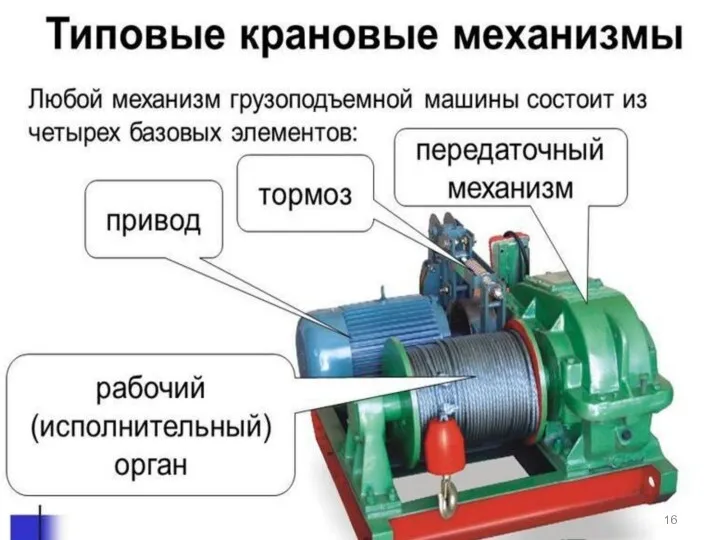
Рабочий орган механизма – элемент, непосредственно осуществляющий рабочий процесс механизма.
В
Рабочий орган механизма – элемент, непосредственно осуществляющий рабочий процесс механизма. В
МЕХАНИЗМЫ ПОДЪЕМА ГРУЗОВ.
УСТРОЙСТВО И РАСЧЕТ
По характеру привода механизмы подъема
могут быть
МЕХАНИЗМЫ ПОДЪЕМА ГРУЗОВ.
УСТРОЙСТВО И РАСЧЕТ
По характеру привода механизмы подъема
могут быть
Механизм подъема
Грузозахватное устройство;
Гибкий орган;
Полиспаст;
Барабан;
Передаточный механизм;
Двигатель;
Тормозное устройство
Грибкова Е.В.
Механизм подъема
Грузозахватное устройство;
Гибкий орган;
Полиспаст;
Барабан;
Передаточный механизм;
Двигатель;
Тормозное устройство
Грибкова Е.В.
Механизм подъема груза
с ручным приводом
1 – рукоятка;
2 – тормоз;
3 –
Механизм подъема груза
с ручным приводом
1 – рукоятка;
2 – тормоз;
3 –
1 – крюковая подвеска; 2 – тяговый орган;
3 – барабан; 4
1 – крюковая подвеска; 2 – тяговый орган;
3 – барабан; 4
Исходные данные для проектирования механизма подъема:
грузоподъемность, т;
высота подъема
грузоподъемность, т;
высота подъема
Алгоритм расчета механизма подъема
Выбирают грузозахватный орган.
Выбирают по грузоподъемности тип крюковой подвески
Алгоритм расчета механизма подъема
Выбирают грузозахватный орган.
Выбирают по грузоподъемности тип крюковой подвески

Грибкова Е.В.
Грибкова Е.В.

Грибкова Е.В.
Грибкова Е.В.
Грибкова Е.В.
Грибкова Е.В.
Грибкова Е.В.
Грибкова Е.В.
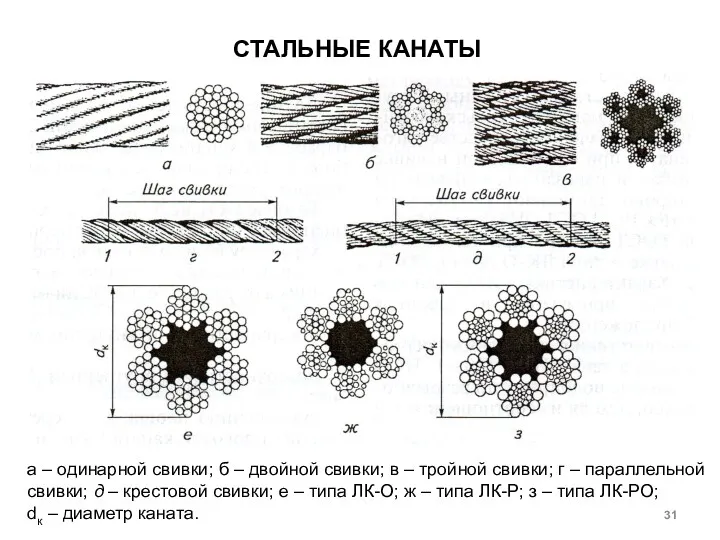
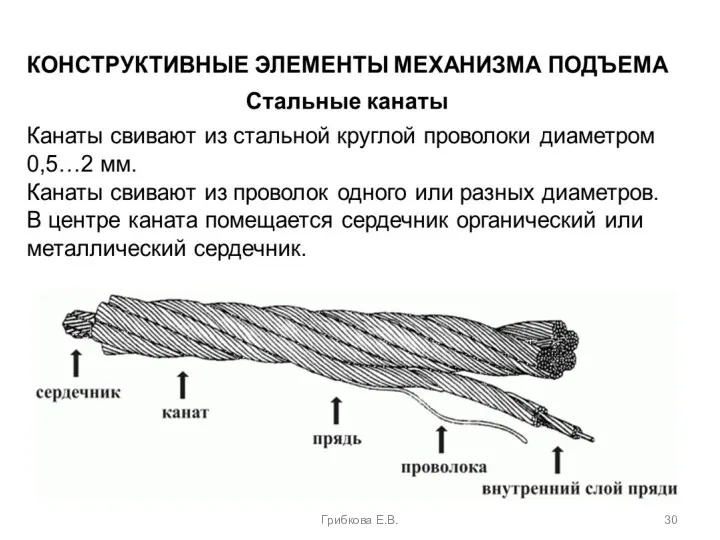
СТАЛЬНЫЕ КАНАТЫ
а – одинарной свивки; б – двойной свивки; в –
СТАЛЬНЫЕ КАНАТЫ
а – одинарной свивки; б – двойной свивки; в –
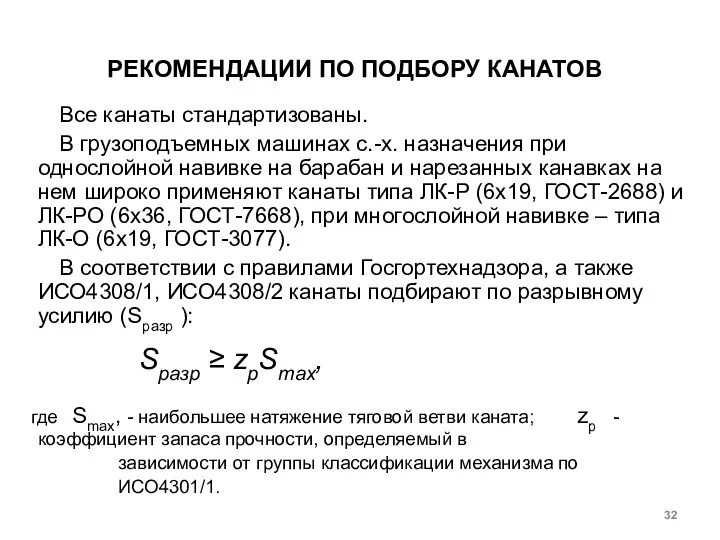
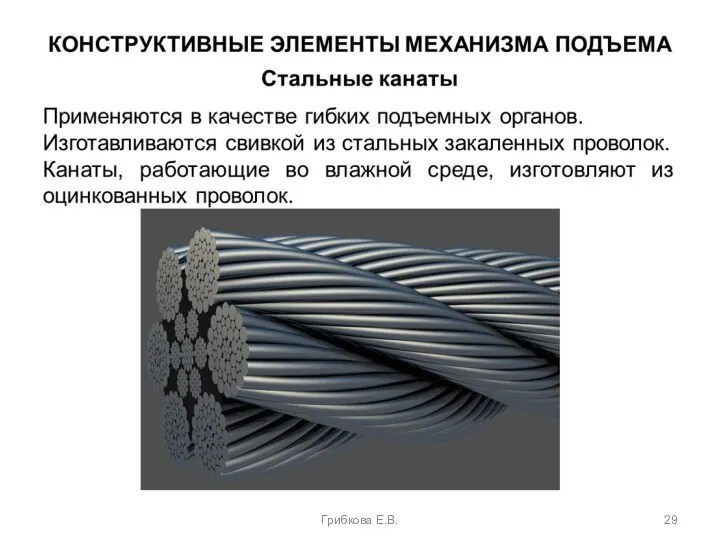
Все канаты стандартизованы.
В грузоподъемных машинах с.-х. назначения при однослойной навивке
Все канаты стандартизованы.
В грузоподъемных машинах с.-х. назначения при однослойной навивке
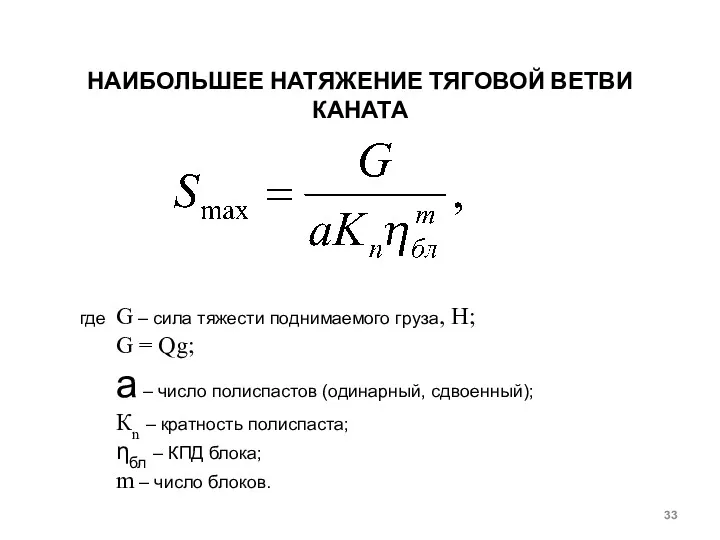
НАИБОЛЬШЕЕ НАТЯЖЕНИЕ ТЯГОВОЙ ВЕТВИ КАНАТА
где G – сила тяжести поднимаемого груза, Н;
НАИБОЛЬШЕЕ НАТЯЖЕНИЕ ТЯГОВОЙ ВЕТВИ КАНАТА
где G – сила тяжести поднимаемого груза, Н;

Грибкова Е.В.
Грибкова Е.В.
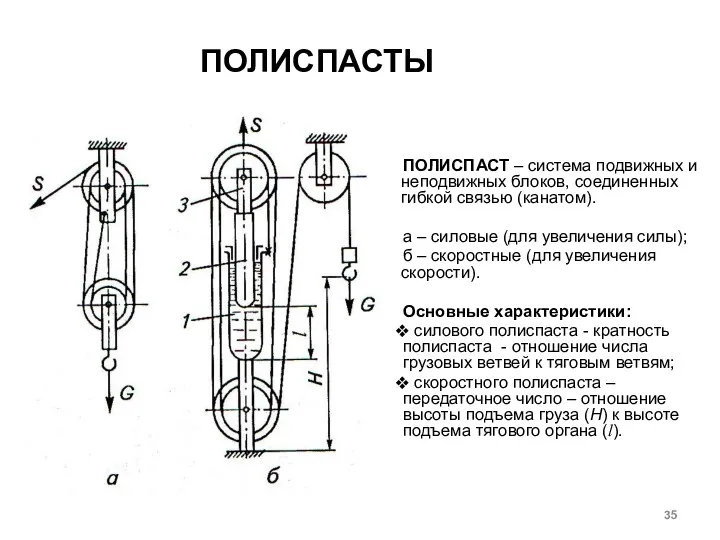
ПОЛИСПАСТЫ
ПОЛИСПАСТ – система подвижных и неподвижных блоков, соединенных гибкой связью (канатом).
а
ПОЛИСПАСТЫ
ПОЛИСПАСТ – система подвижных и неподвижных блоков, соединенных гибкой связью (канатом).
а
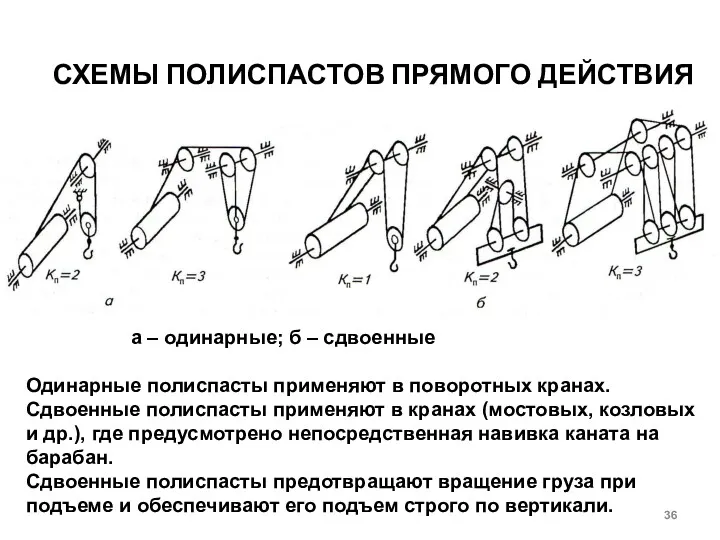
СХЕМЫ ПОЛИСПАСТОВ ПРЯМОГО ДЕЙСТВИЯ
а – одинарные; б – сдвоенные
Одинарные полиспасты
СХЕМЫ ПОЛИСПАСТОВ ПРЯМОГО ДЕЙСТВИЯ
а – одинарные; б – сдвоенные
Одинарные полиспасты
Грибкова Е.В.
Грибкова Е.В.
ГРУЗОЗАХВАТНЫЕ ОРГАНЫ
УНИВЕРСАЛЬНЫЕ:
крюки однорогие и двурогие;
грузовые петли
СПЕЦИАЛЬНЫЕ:
ковши;
захваты;
грейферы;
ГРУЗОЗАХВАТНЫЕ ОРГАНЫ
УНИВЕРСАЛЬНЫЕ:
крюки однорогие и двурогие;
грузовые петли
СПЕЦИАЛЬНЫЕ:
ковши;
захваты;
грейферы;
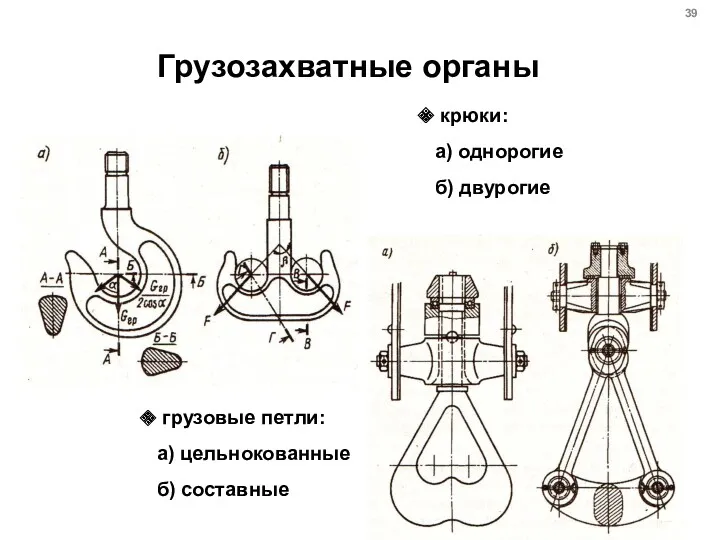
крюки:
а) однорогие
б) двурогие
грузовые петли:
а) цельнокованные
б) составные
Грузозахватные органы
крюки:
а) однорогие
б) двурогие
грузовые петли:
а) цельнокованные
б) составные
Грузозахватные органы

Захват груза стропами
Грузозахватные органы
Захват груза стропами
Грузозахватные органы
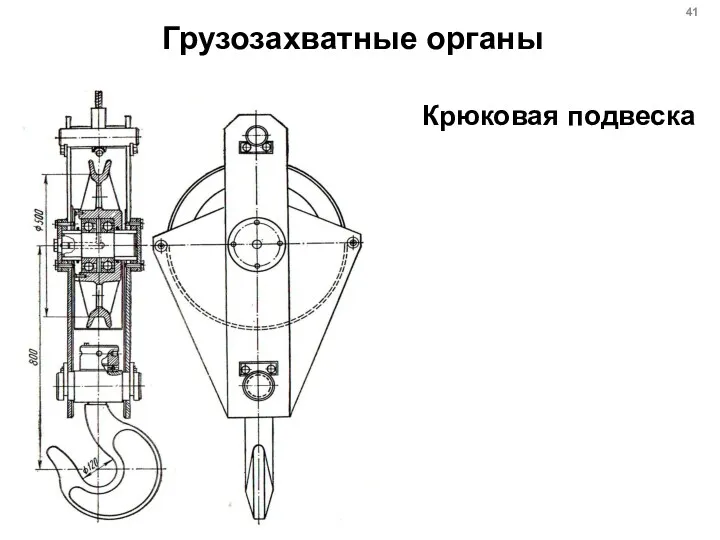
Крюковая подвеска
Грузозахватные органы
Крюковая подвеска
Грузозахватные органы
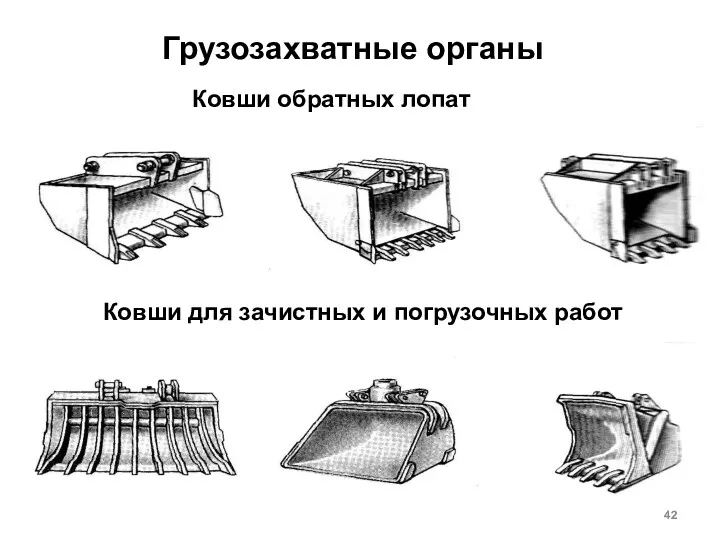
Ковши для зачистных и погрузочных работ
Ковши обратных лопат
Грузозахватные органы
Ковши для зачистных и погрузочных работ
Ковши обратных лопат
Грузозахватные органы
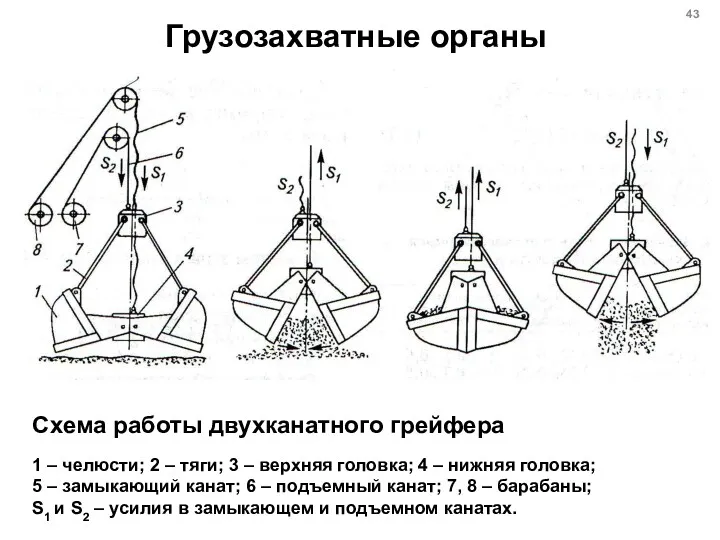
Схема работы двухканатного грейфера
1 – челюсти; 2 – тяги; 3 –
Схема работы двухканатного грейфера
1 – челюсти; 2 – тяги; 3 –
Подъемный электромагинт
1-цепь;
2- контактная коробка;
3 – корпус;
4 – обмотка;
Подъемный электромагинт
1-цепь;
2- контактная коробка;
3 – корпус;
4 – обмотка;

Грибкова Е.В.
Сварной гладкий барабан
для многослойной навивки
Литой нарезной барабан
для однослойной
Грибкова Е.В.
Сварной гладкий барабан
для многослойной навивки
Литой нарезной барабан
для однослойной

Грибкова Е.В.
Грибкова Е.В.
БАРАБАНЫ
а – с многослойной навивкой каната;
б – с однослойной
навивкой каната.
БАРАБАНЫ
а – с многослойной навивкой каната;
б – с однослойной
навивкой каната.
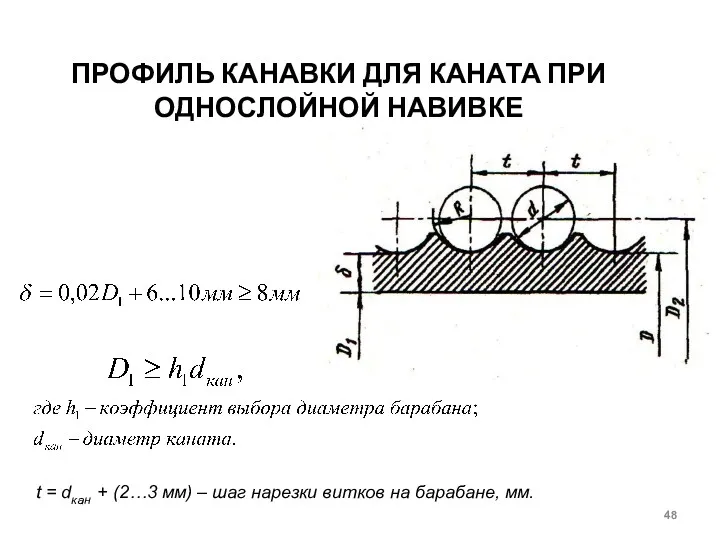
ПРОФИЛЬ КАНАВКИ ДЛЯ КАНАТА ПРИ ОДНОСЛОЙНОЙ НАВИВКЕ
t = dкан + (2…3
ПРОФИЛЬ КАНАВКИ ДЛЯ КАНАТА ПРИ ОДНОСЛОЙНОЙ НАВИВКЕ
t = dкан + (2…3
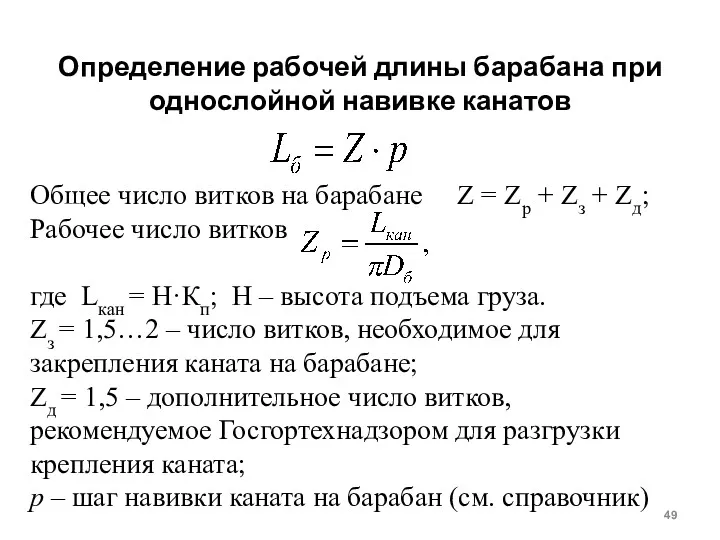
Определение рабочей длины барабана при однослойной навивке канатов
Общее число витков
Определение рабочей длины барабана при однослойной навивке канатов
Общее число витков
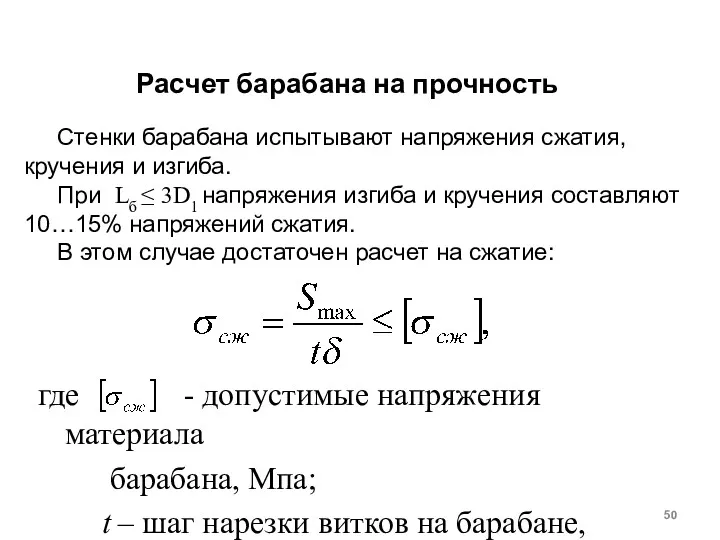
Расчет барабана на прочность
Стенки барабана испытывают напряжения сжатия, кручения и
Расчет барабана на прочность
Стенки барабана испытывают напряжения сжатия, кручения и
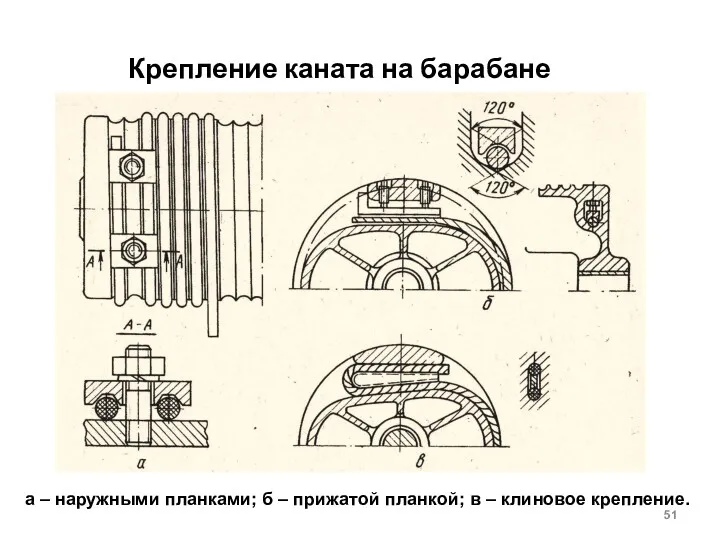
Крепление каната на барабане
а – наружными планками; б – прижатой планкой;
Крепление каната на барабане
а – наружными планками; б – прижатой планкой;
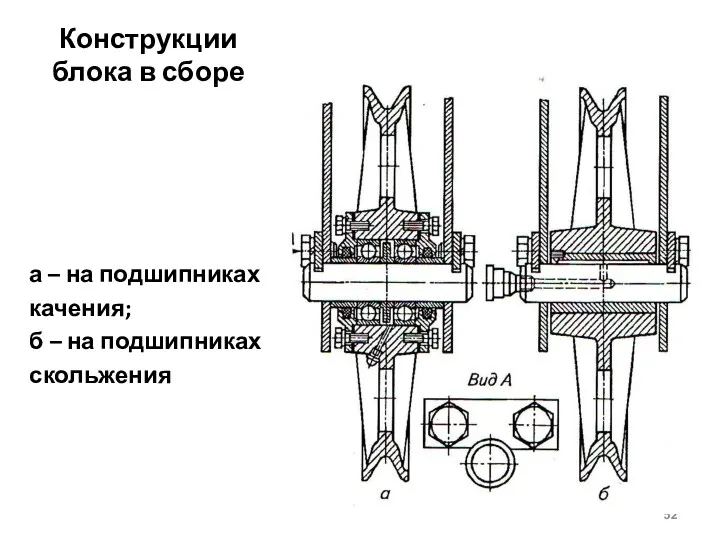
Конструкции
блока в сборе
а – на подшипниках
качения;
б – на подшипниках
Конструкции
блока в сборе
а – на подшипниках
качения;
б – на подшипниках
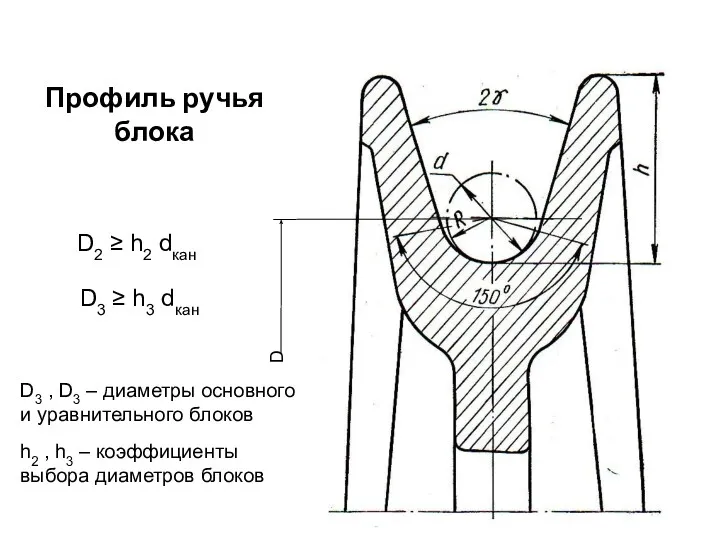
Профиль ручья блока
D2 ≥ h2 dкан
D3 ≥ h3 dкан
D3 , D3
Профиль ручья блока
D2 ≥ h2 dкан
D3 ≥ h3 dкан
D3 , D3
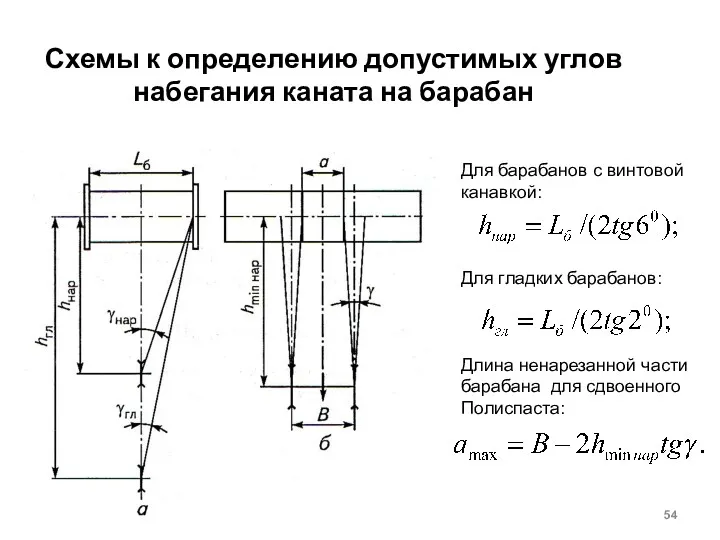
Схемы к определению допустимых углов набегания каната на барабан
Для барабанов с
Схемы к определению допустимых углов набегания каната на барабан
Для барабанов с
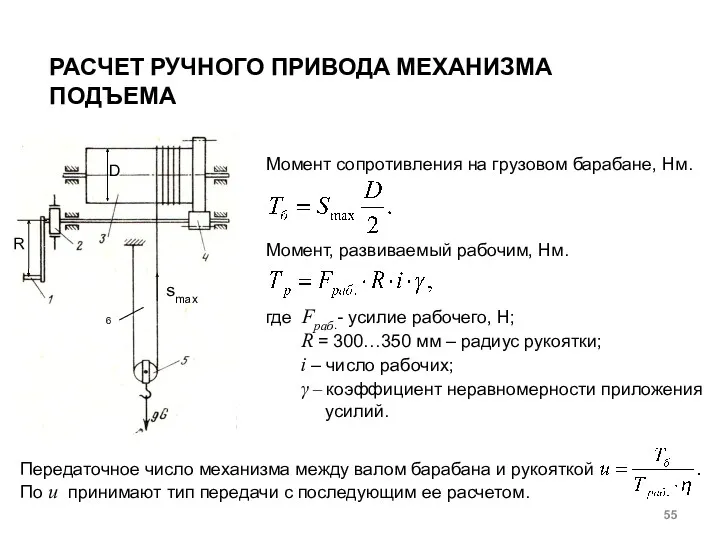
РАСЧЕТ РУЧНОГО ПРИВОДА МЕХАНИЗМА ПОДЪЕМА
R
Момент сопротивления на грузовом барабане, Нм.
Момент, развиваемый
РАСЧЕТ РУЧНОГО ПРИВОДА МЕХАНИЗМА ПОДЪЕМА
R
Момент сопротивления на грузовом барабане, Нм.
Момент, развиваемый
ЭЛЕКТРОДВИГАТЕЛИ ДЛЯ МЕХАНИЗМОВ ПОДЪЕМА
В механизмах подъема используют крановые электродвигатели:
переменного тока
ЭЛЕКТРОДВИГАТЕЛИ ДЛЯ МЕХАНИЗМОВ ПОДЪЕМА
В механизмах подъема используют крановые электродвигатели:
переменного тока
Электродвигатели серии МТ
Их недостатки:
имеют большую массу, габаритные размеры и
Электродвигатели серии МТ
Их недостатки:
имеют большую массу, габаритные размеры и
Подбор электродвигателей для механизма подъема
Подбирают по статической мощности, необходимой для подъема
Подбор электродвигателей для механизма подъема
Подбирают по статической мощности, необходимой для подъема
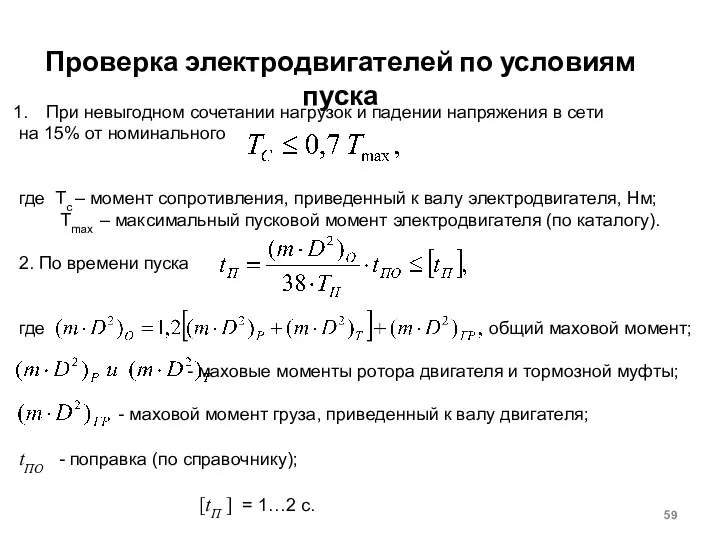
Проверка электродвигателей по условиям пуска
При невыгодном сочетании нагрузок и падении напряжения
Проверка электродвигателей по условиям пуска
При невыгодном сочетании нагрузок и падении напряжения
 Энергия. Виды энергии
Энергия. Виды энергии Специальная теория относительности
Специальная теория относительности Своя игра по физике
Своя игра по физике Архимедова сила
Архимедова сила Расчет пути и времени движения
Расчет пути и времени движения Кинематика
Кинематика Основы теории напряженного состояния. Понятия главных площадок и главных напряжений. Лекция 9
Основы теории напряженного состояния. Понятия главных площадок и главных напряжений. Лекция 9 Механические волны
Механические волны Решение задач с помощью законов Ньютона и под действием нескольких сил
Решение задач с помощью законов Ньютона и под действием нескольких сил Разработка урока физики по теме Плотность вещества 7 класс
Разработка урока физики по теме Плотность вещества 7 класс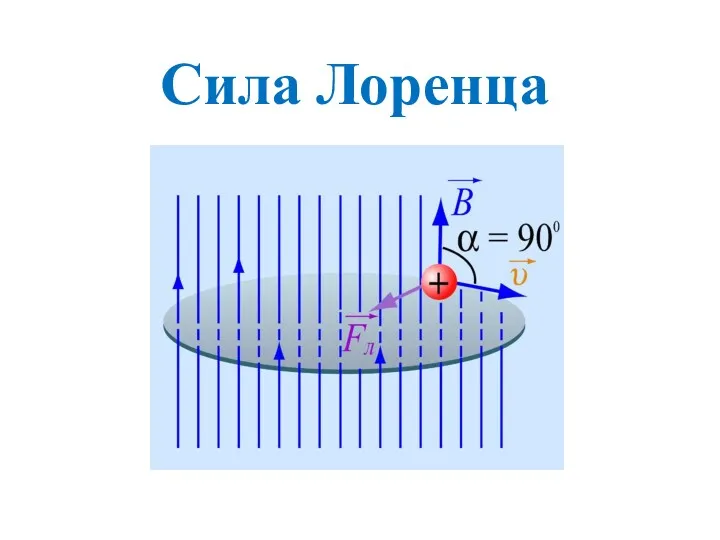 Сила Лоренца
Сила Лоренца Интегрированный урок физики и информатики
Интегрированный урок физики и информатики Уравнения Максвелла. Вихревое электрическое поле
Уравнения Максвелла. Вихревое электрическое поле Резерфорд тәжірибесі. Атомның планетарлық моделі
Резерфорд тәжірибесі. Атомның планетарлық моделі Методическая рекомендация внеклассного мероприятия Физическая лихорадка Диск
Методическая рекомендация внеклассного мероприятия Физическая лихорадка Диск Микроскоп кұрылысы
Микроскоп кұрылысы Приборы электромагнитной и электродинамической систем
Приборы электромагнитной и электродинамической систем Устройство и принцип работы воздухораспределителя 483
Устройство и принцип работы воздухораспределителя 483 приемы целеполагания
приемы целеполагания Фізичні явища
Фізичні явища Механічна робота. Потужність
Механічна робота. Потужність Введение, основные понятия
Введение, основные понятия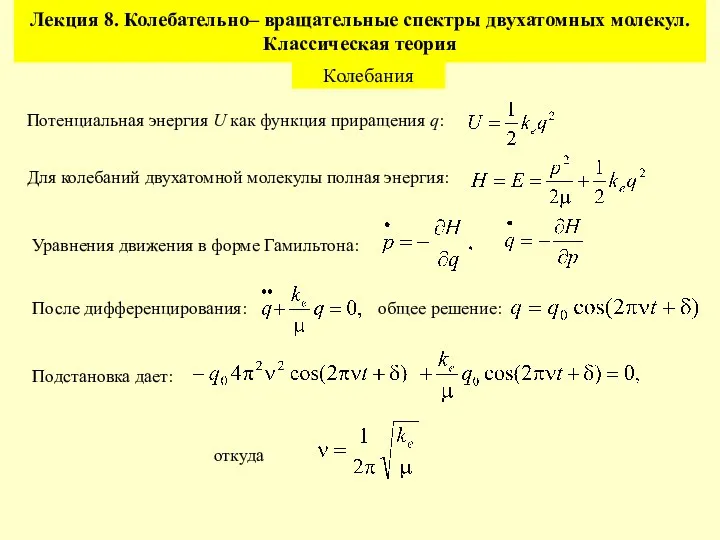 Колебательно– вращательные спектры двухатомных молекул. Классическая теория
Колебательно– вращательные спектры двухатомных молекул. Классическая теория Задачи. Сила Лоренца и Ампера
Задачи. Сила Лоренца и Ампера Исследовательский проект В мире звуков
Исследовательский проект В мире звуков Передачі обертального руху
Передачі обертального руху Теоретическая механика. Статика абсолютно твердого тела
Теоретическая механика. Статика абсолютно твердого тела Основные технологии обработки металлов и пластмасс ручными инструментами (6 класс)
Основные технологии обработки металлов и пластмасс ручными инструментами (6 класс)