- Основы технической механики. Связи и их реакции. Тема 2

Содержание
- 2. Связи и их реакции Тело, которое может свободно перемещаться в пространстве называется свободным. (самолет, снаряд…) Тело,
- 3. Аксиома связи Всякое несвободное тело можно рассматривать как свободное, если мысленно отбросить наложенные на тело связи
- 4. Принцип освобождаемости Сила mg – заданная или активная. Активная сила – модуль и направление известны. Реакция
- 5. Типы связей 1. Гладкая поверхность или плоскость. Гладкая поверхность – это поверхность, на которой можно пренебречь
- 6. 2. Гладкая опора Связь, осуществленная в виде гладкой опоры , не дает телу перемещаться в направлении,
- 7. 3. Нить Связь, осуществляемая в виде гибкой нити не позволяет телу удаляться от точки привеса А,
- 8. 4. Цилиндрический шарнир Шарнирно-неподвижная опора вала, ось которого проходит через шарнир А перпендикулярно плоскости чертежа. Цилиндрический
- 10. 5. Невесомый стержень Жесткий невесомый стержень, шарнирно прикрепленный к телу, испытывает действие только двух сил, приложенных
- 11. Рис.11,а и б
- 12. 6. Жесткая заделка Заделка исключает возможность любых перемещений вдоль осей Ох и Оу, а также поворот
- 13. Плоская система сил Система сил, линии действия которых лежат в одной плоскости, называется плоской. Плоскую систему
- 15. Способы сложения сходящихся сил: Геометрический; Аналитический Геометрический способ сложения сходящихся сил: От произвольной точки О откладываем
- 16. Аналитический способ сложения сходящихся сил Проектируя векторное равенство F1+F2+F3=R на оси координат, получим два алгебраических равенства:
- 17. Определение равнодействующей всех сходящихся сил R
- 18. Условием равновесия системы сходящихся сил является равенство нулю модуля равнодействующей R, т.е. силовой многоугольник должен быть
- 19. Для плоской системы сходящихся сил получим два уравнения равновесия: ∑???=?; ∑???=?. Следовательно, для равновесия системы сходящихся
- 21. Решение: ∑???=?; ∑???=?. -Т2cos60o +T1cos30o=0; Т2cos30o +T1cos60o -mg=0; T1=2,5H; T2=4,34H. При этих силах свободное тело находится
- 22. 1 2 3 4 5 6
- 23. Момент силы относительно точки. Сила, действующая на тело может не только его смещать, но и поворачивать
- 24. Моментом силы F относительно центра О называется величина, равная произведению силы на кратчайшее расстояние от точки
- 25. Пара сил Система двух равных по модулю, параллельных и противоположно направленных сил, приложенных к телу, называется
- 26. Момент пары сил Плечом пары сил называется кратчайшее расстояние между линиями действия сил, составляющих пару. Моментом
- 27. Свойства пары сил
- 28. Контрольные вопросы 1. Что такое сила? 2. Какие силы называются уравновешивающими? 3. Что называется равнодействующей силой?
- 29. Пространственная система сил Пространственной будем называть систему сил, линии действия которых имеют любые направления в пространстве.
- 30. В соответствии с определением Мо= r x F = momo(F) Мо=hF=rFsin(r,F) = = 2 площ.ΔОАВ
- 31. Пространственная система сил Определить моменты сил Q, T, P относительно осей координат, если известны точки приложения
- 32. Решение: 1. Определяем моменты силы T относительно осей координат: momx(T) = -Ta; momy(T) = 0 (так
- 33. Пространственная система сил
- 34. Теорема приведения пространственной системы сил к заданному центру Пространственная система сил, действующих на АТТ, может быть
- 35. Кинематика точки Кинематика – это раздел механики, в котором изучается движение материальных тел в пространстве с
- 36. Способы задания движения материальной точки Траектория – линия движения. Движение точки задано естественным способом, если известны:
- 37. Положение точки определяется радиусом-вектором r, проведенным из центра О в точку М. Способ задания движения называется
- 38. Координатный способ задания движения Должны быть известны зависимости, показывающие изменения во времени координаты в пространстве: x=f1(t);
- 39. Скорость точки Скорость характеризует быстроту и направление движения точки. Поскольку v - это производная r=r(t), то
- 41. Ускорение точки Ускорение точки – векторная величина, характеризующая быстроту изменения с течением времени вектора скорости: а
- 42. При естественном способе задания траектории движения материальной точки ее вектор ускорения можно разложить по естественным осям
- 43. Нормальное ускорение an показывает изменение направления вектора скорости, когда материальная точка движется по криволинейной траектории.
- 44. 1 2 3 4 5 6
- 45. 1 2 3 4 5 6
- 46. 1 2 3 4 5 6
- 47. 1 2 3 4 5 6
- 48. 1 2 3 4 5 6
- 50. Скачать презентацию
 Лучшие физики. КВН
Лучшие физики. КВН Безопасное использование ядерной энергии
Безопасное использование ядерной энергии Что изучает физика. Междисциплинарные связи
Что изучает физика. Междисциплинарные связи Методическая разработка урока физики в 7 классе Решение задач на расчет гидростатического давления
Методическая разработка урока физики в 7 классе Решение задач на расчет гидростатического давления Равновесие в системе пар-жидкость. Перегонка
Равновесие в системе пар-жидкость. Перегонка Испарение и конденсация. Кипение жидкости. 8 класс
Испарение и конденсация. Кипение жидкости. 8 класс Квантовая и оптическая электроника
Квантовая и оптическая электроника Физика. Электрические явления
Физика. Электрические явления Презентация по физике Отечественные физики лауреаты Нобелевской премии
Презентация по физике Отечественные физики лауреаты Нобелевской премии Основные уравнения теории оболочек, безмоментная теория оболочек вращения
Основные уравнения теории оболочек, безмоментная теория оболочек вращения 10 класс Презентация по физике на тему Электрический ток в вакууме
10 класс Презентация по физике на тему Электрический ток в вакууме Звукові коливання 5 клас
Звукові коливання 5 клас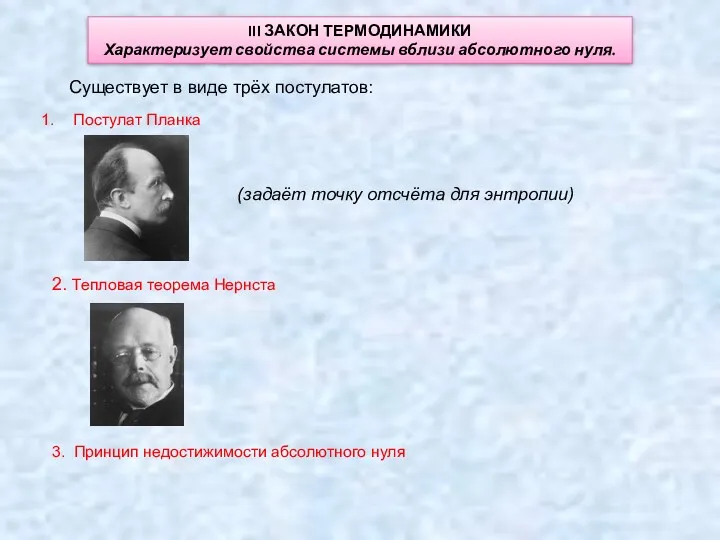 Третий закон термодинамики
Третий закон термодинамики Техническая термодинамика. Основы теории теплопередачи. (Лекция 8)
Техническая термодинамика. Основы теории теплопередачи. (Лекция 8) Методы обработки наружных поверхностей
Методы обработки наружных поверхностей Определение по заданному обозначению посадки, предельных отклонений и размеров элементов деталей, допусков отверстия вала
Определение по заданному обозначению посадки, предельных отклонений и размеров элементов деталей, допусков отверстия вала Методическая разработка урока в 7 классе по теме Механическое движение
Методическая разработка урока в 7 классе по теме Механическое движение Никола Тесла
Никола Тесла Электрический ток в различных средах
Электрический ток в различных средах Молекулярно-кинетические свойства коллоидных систем
Молекулярно-кинетические свойства коллоидных систем Геометрическая оптика
Геометрическая оптика Первый урок физики в 7 классе
Первый урок физики в 7 классе Уравнения Лагранжа ii рода. Обобщённые координаты, скорости и силы
Уравнения Лагранжа ii рода. Обобщённые координаты, скорости и силы Модель атома. Опыт Резерфорда
Модель атома. Опыт Резерфорда Урок физики в 10-м классе по теме Сила трения
Урок физики в 10-м классе по теме Сила трения Количество теплоты. Единицы количества теплоты. Удельная теплоемкость
Количество теплоты. Единицы количества теплоты. Удельная теплоемкость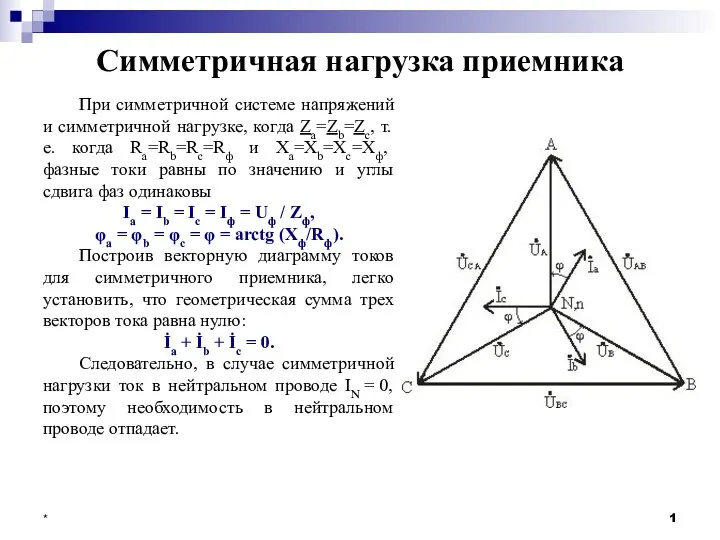 Симметричная нагрузка приемника
Симметричная нагрузка приемника Реактивное движение
Реактивное движение