- Плоская система произвольно расположенных сил. Статика

Содержание
- 2. Теорема Пуансо Силу можно перенести параллельно линии её действия, при этом нужно добавить пару сил, с
- 3. Луи Пуансо 1777 − 1859 Французский математик и механик Академик Парижской Академии наук Ввёл понятие реакции
- 4. Произвольная плоская система сил ⇒ Силы не пересекаются в одной точке ⇒ Упрощаем, перенеся все силы
- 5. Произвольная плоская система сил Точка приведения Моменты Главный вектор Главный момент
- 6. Главный вектор системы Геометрическая сумма векторов Для проекций Модуль главного вектора
- 7. Главный момент системы Алгебраическая сумма моментов сил системы относительно точки приведения
- 8. Условие равновесия Для равновесия плоской системы произвольно расположенных сил необходимо и достаточно, чтобы векторная сумма всех
- 9. Основная форма уравнения равновесия
- 10. Уравнений моментов можно записать бесконечное множество Но на плоскости можно составить только 3 независимых уравнения моментов,
- 11. Формы уравнений равновесия Первая Вторая Третья
- 12. Задача Найти момент присоединённой пары при переносе силы F3 в точку В F1=10 кН F2=15 кН
- 13. Задача Найти главный вектор системы и главный момент системы относительно точки В F1=10 кН F2=16 кН
- 14. Решение
- 16. Скачать презентацию
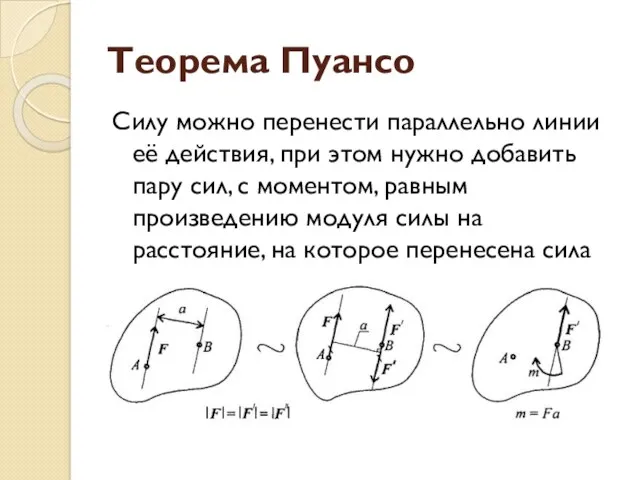
Теорема Пуансо
Силу можно перенести параллельно линии её действия, при этом нужно
Теорема Пуансо
Силу можно перенести параллельно линии её действия, при этом нужно
Луи Пуансо
1777 − 1859
Французский математик и механик
Академик Парижской Академии наук
Ввёл понятие
Луи Пуансо
1777 − 1859
Французский математик и механик
Академик Парижской Академии наук
Ввёл понятие
Произвольная плоская система сил ⇒
Силы не пересекаются в одной точке ⇒
Упрощаем,
Произвольная плоская система сил ⇒
Силы не пересекаются в одной точке ⇒
Упрощаем,
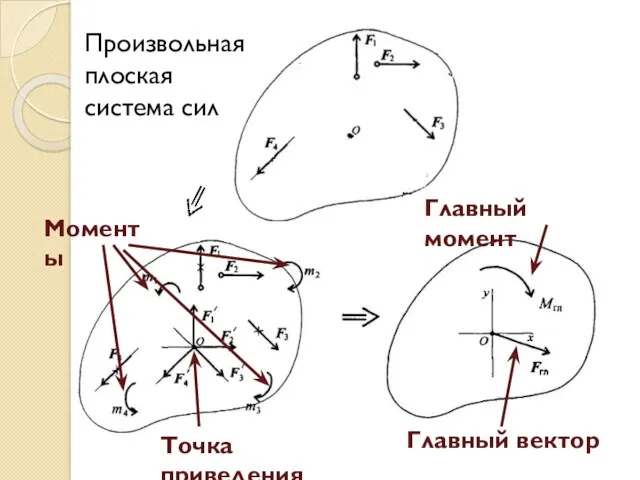
Произвольная плоская система сил
Точка приведения
Моменты
Главный вектор
Главный момент
Произвольная плоская система сил
Точка приведения
Моменты
Главный вектор
Главный момент
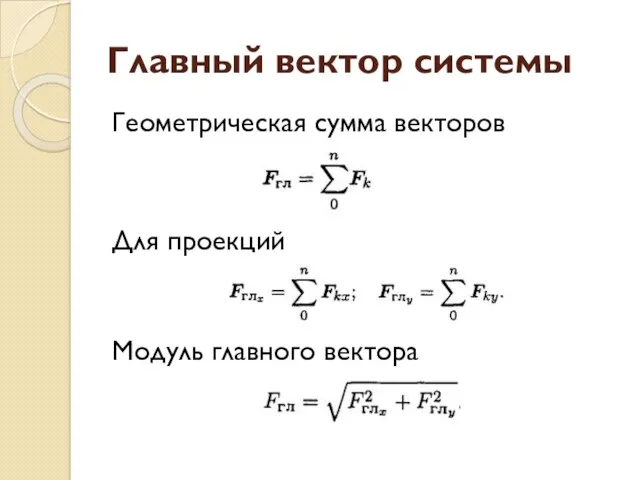
Главный вектор системы
Геометрическая сумма векторов
Для проекций
Модуль главного вектора
Главный вектор системы
Геометрическая сумма векторов
Для проекций
Модуль главного вектора
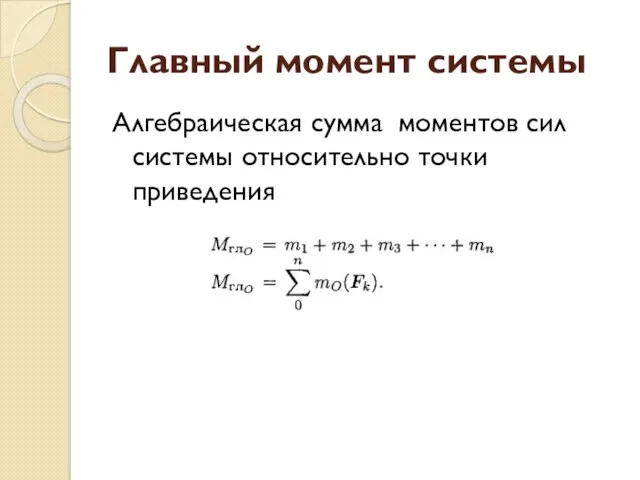
Главный момент системы
Алгебраическая сумма моментов сил системы относительно точки приведения
Главный момент системы
Алгебраическая сумма моментов сил системы относительно точки приведения
Условие равновесия
Для равновесия плоской системы произвольно расположенных сил необходимо и
Условие равновесия
Для равновесия плоской системы произвольно расположенных сил необходимо и
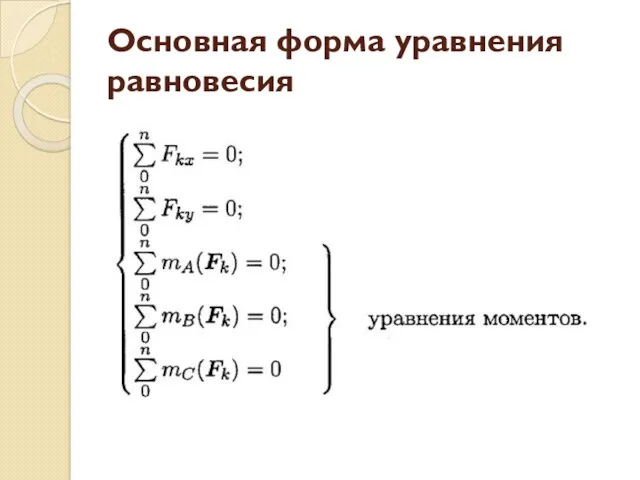
Основная форма уравнения равновесия
Основная форма уравнения равновесия
Уравнений моментов можно записать бесконечное множество
Но на плоскости можно составить только
Уравнений моментов можно записать бесконечное множество
Но на плоскости можно составить только
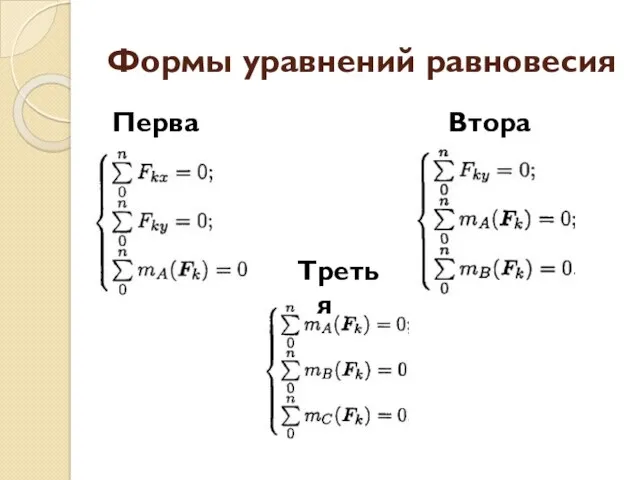
Формы уравнений равновесия
Первая
Вторая
Третья
Формы уравнений равновесия
Первая
Вторая
Третья
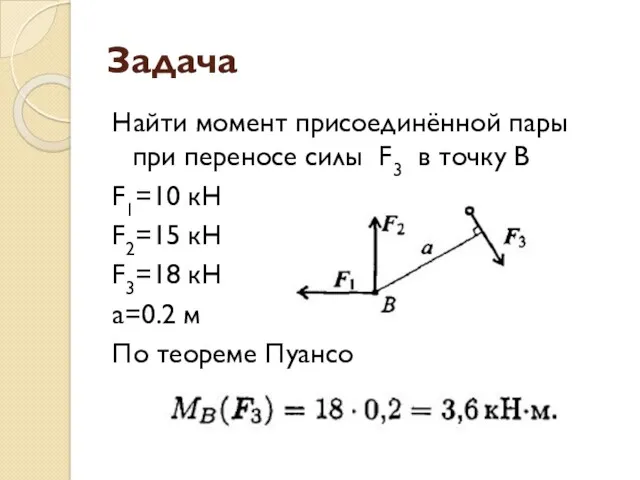
Задача
Найти момент присоединённой пары при переносе силы F3 в точку В
F1=10
Задача
Найти момент присоединённой пары при переносе силы F3 в точку В
F1=10
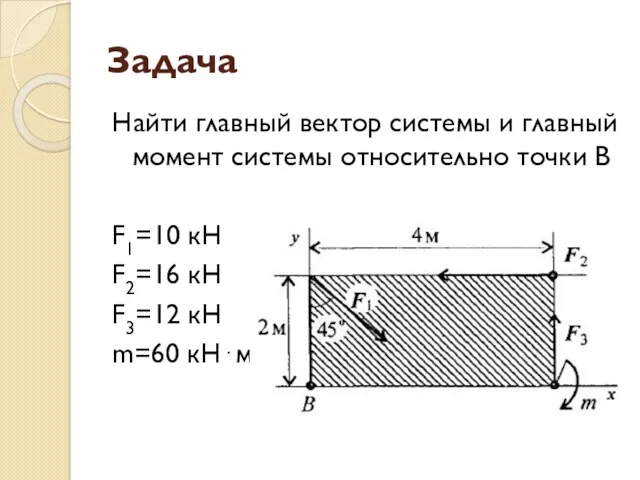
Задача
Найти главный вектор системы и главный момент системы относительно точки В
F1=10
Задача
Найти главный вектор системы и главный момент системы относительно точки В
F1=10
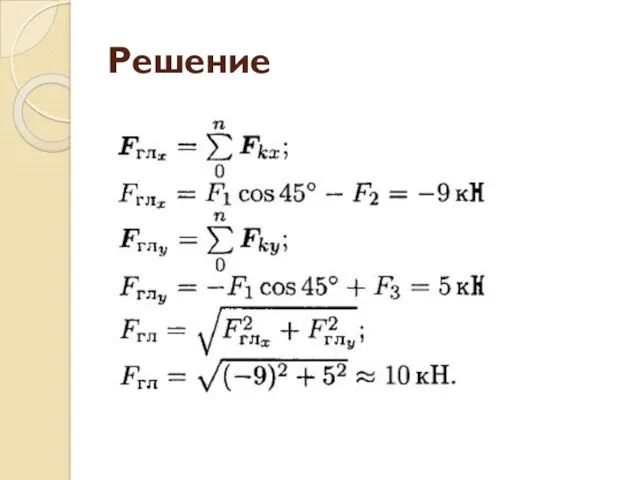
Решение
Решение
 Урок по физике Соединение проводников. Работа и мощность электрического тока
Урок по физике Соединение проводников. Работа и мощность электрического тока Дорожно-строительная техника. Экскаваторы
Дорожно-строительная техника. Экскаваторы Использование методики коллективно творческой деятельности на уроках физики
Использование методики коллективно творческой деятельности на уроках физики Система мащення охолодження та пуску ДВЗ
Система мащення охолодження та пуску ДВЗ Источники света. Распространение света
Источники света. Распространение света Статика – раздел механики
Статика – раздел механики Физические основы механики
Физические основы механики Значение радиоволн для физики и человечества. 11 класс
Значение радиоволн для физики и человечества. 11 класс Вакуумдегi электр тогы
Вакуумдегi электр тогы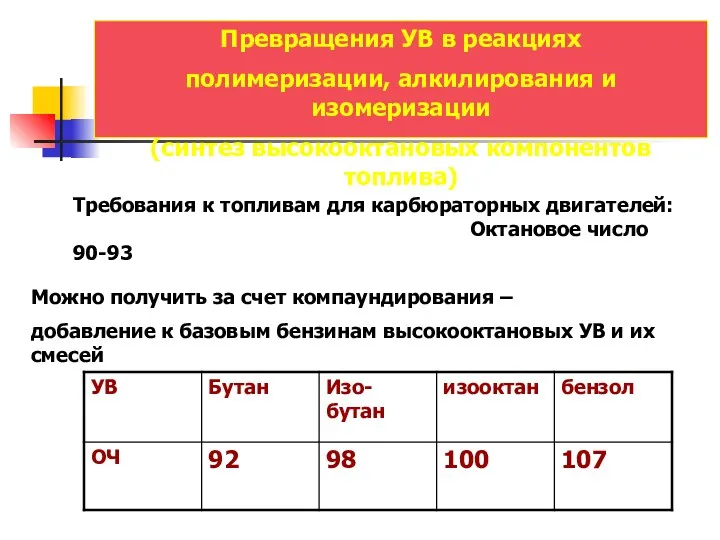 Синтез высокооктановых компонентов топлива
Синтез высокооктановых компонентов топлива Явление диффузии в жидкостях
Явление диффузии в жидкостях Расчет параметров гидротранспорта
Расчет параметров гидротранспорта Колесная пара
Колесная пара Портфолио учителя математики, физики Черненко А.С.
Портфолио учителя математики, физики Черненко А.С. Количество теплоты. Единицы количества теплоты. Удельная теплоемкость
Количество теплоты. Единицы количества теплоты. Удельная теплоемкость Лаборант кабинета физики
Лаборант кабинета физики Интересные факты о физике и астрономии
Интересные факты о физике и астрономии §9. Сложное движение точки
§9. Сложное движение точки Освещение как объект комплексного эргономического анализа
Освещение как объект комплексного эргономического анализа Физика в спорте
Физика в спорте Струм у вакуумі та його застосування
Струм у вакуумі та його застосування Динамика кулисного механизма
Динамика кулисного механизма Урок в 7 классе По следам одной катастрофы
Урок в 7 классе По следам одной катастрофы Закон сохранения механической энергии
Закон сохранения механической энергии Нитрид индия – новый материал для оптоэлектроники
Нитрид индия – новый материал для оптоэлектроники Өлшеу қателігі. Құрал шкаласының және жүйелік қателерді есепке алу. Қос қателікті бағалау
Өлшеу қателігі. Құрал шкаласының және жүйелік қателерді есепке алу. Қос қателікті бағалау Теорема об изменении кинетической энергии системы
Теорема об изменении кинетической энергии системы Взаимодействие заряженных частиц со средой
Взаимодействие заряженных частиц со средой