- Принципы построения автоматических систем

Содержание
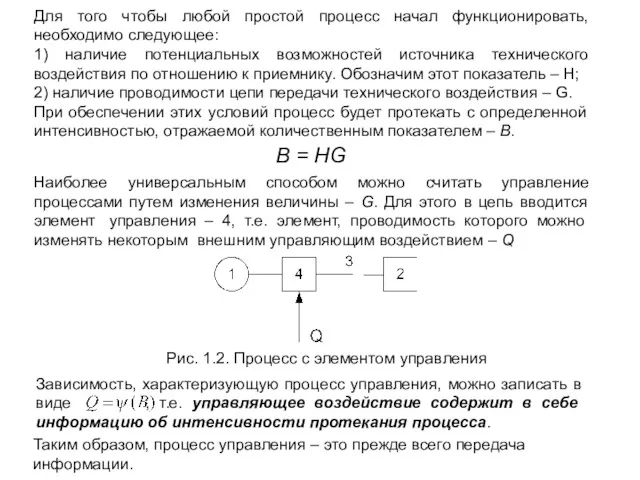
- 2. . Для того чтобы любой простой процесс начал функционировать, необходимо следующее: 1) наличие потенциальных возможностей источника
- 3. Автоматическое регулирование Целью автоматического регулирования является поддержание заданного значения определенной физической величины, называемой управляемой или регулируемой
- 4. Принцип регулирования по отклонению регулируемой величины от заданного значения (принцип Ползунова-Уатта) Рис.1.4. САР напряжения генератора, построенная
- 5. Принцип регулирования по возмущению – принцип Понселе заключается в том, что регулятор в системе реагирует на
- 6. Рис. 1.8. Функциональная схема системы комбинированного регулирования
- 7. Понятия о функциональных схемах а) одна входная величина б) две входные величины Рис. 1.9. Примеры изображения
- 8. Функциональные схемы используются для анализа статических (установившихся) режимов систем. В этих режимах любой элемент характеризуется зависимостью
- 9. Рис. 1.13. Неоднозначные статические характеристики Некоторые элементы не имеют жесткой математической зависимости между входным и выходным
- 10. Для линейных элементов соотношение между входным и выходным сигналами записывается выражением , которое называется уравнением элемента
- 11. Зоной нечувствительности элемента называется максимальный диапазон изменения входного сигнала, при котором выходной сигнал ещё не изменяется
- 12. В схемах элементы могут соединяться между собой различным образом. Однако самые сложные схемы содержат три основных
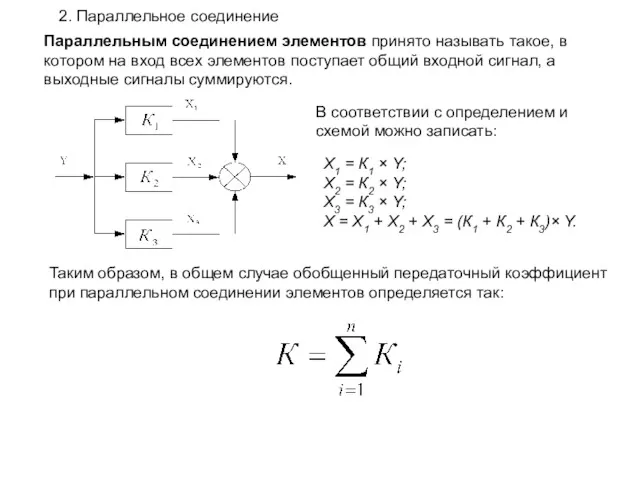
- 13. 2. Параллельное соединение Параллельным соединением элементов принято называть такое, в котором на вход всех элементов поступает
- 14. 3. Встречно-параллельное соединение (элемент, охваченный обратной связью) Встречно-параллельным соединением называется такое соединение элементов, когда выходной сигнал
- 15. СТАТИКА ЛИНЕЙНЫХ СИСТЕМ НЕПРЕРЫВНОГО ДЕЙСТВИЯ Различают два основных состояния систем: статическое (установившийся режим); динамическое (режим переходного
- 16. Статическая система автоматического управления Уравнения статики для каждого элемента: Для О.Р. Х = КорХр – Коz
- 17. Статическая характеристика статической САР Основные свойства статических САР: 1) статическая ошибка в статических системах зависит от
- 18. Астатическая система Астатический элемент описывается уравнением О.Р. Х = Кор Хр - Коz Z Астатический элемент
- 19. Статическая характеристика астатической системы Свойства астатических систем:
- 20. В общем виде уравнение системы автоматического управления n-го порядка после линеаризации: Для линейных системах: Динамика линейных
- 21. Применение операторных методов в теории автоматического управления прямое преобразование Лапласа При нулевых начальных условиях Уравнение линейной
- 22. Понятие о передаточной функции и комплексном передаточном коэффициенте Передаточной функцией в форме преобразования Лапласа принято называть
- 23. Преобразование Фурье отличается от преобразования Лапласа тем, что в качестве комплексного переменного используется комплекс частоты, т.е.
- 24. Понятие о переходных и частотных характеристиках Если получить графическое изображение переходного процесса в системе, т.е. x=f(t),
- 25. Физический смысл частотных характеристик – это различные аспекты реакции системы на синусоидальные входные сигналы различной частоты.
- 26. В практике построения частотных характеристик частота может меняться в очень широких пределах, поэтому линейные шкалы частот
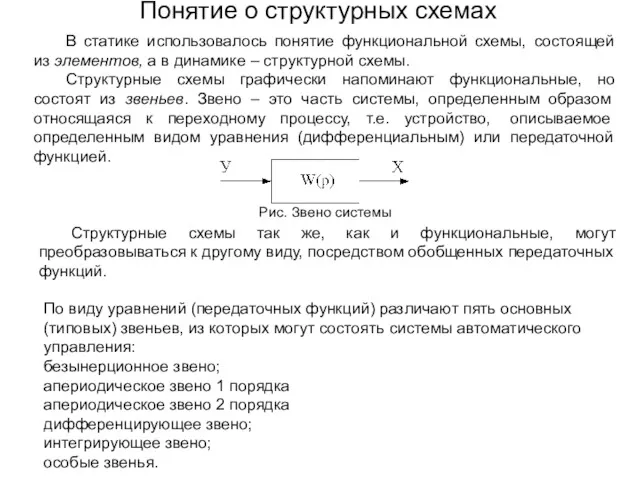
- 27. Понятие о структурных схемах В статике использовалось понятие функциональной схемы, состоящей из элементов, а в динамике
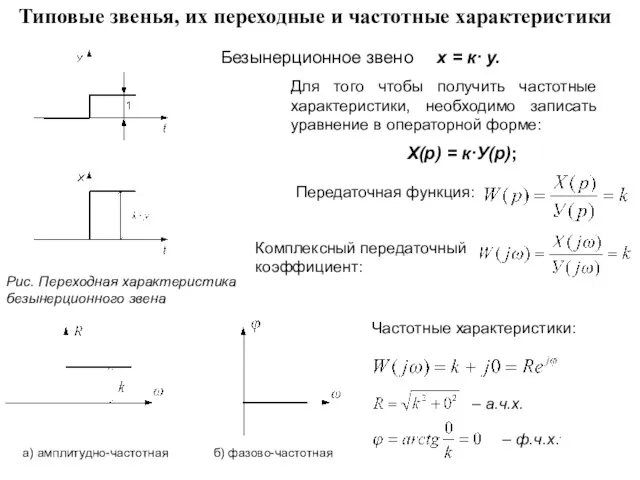
- 28. Типовые звенья, их переходные и частотные характеристики Безынерционное звено х = к· у. Рис. Переходная характеристика
- 29. Рис. Амплитудно-фазовая частотная характеристика безынерционного звена Рис. Логарифмическая амплитудно-частотная характеристика безынерционного звена
- 30. Апериодическое звено 1 порядка Переходная характеристика Уравнение в операторной форме: Передаточная функция: Комплексный передаточный коэффициент:
- 31. комплексный передаточный коэффициент: Апериодическое звено 1 порядка в.ч.х м.ч.х а.ч.х ф.ч.х Амплитудно-фазовая характеристика
- 32. Апериодическое звено 1 порядка Логарифмическую амплитудно-частотную характеристику можно построить из выражения: Эту характеристику обычно строят не
- 33. Для любого звена 1-го порядка высокочастотный участок имеет наклон 20 дб/дек. Допущением является то, что характеристика
- 34. Интегрирующее звено Уравнение интегрирующего звена или где Ка – постоянный коэффициент При у=1: т.е. линейно нарастающая
- 35. Интегрирующее звено Для получения частотных характеристик необходимо записать уравнение интегрирующего звена в операторной форме: Передаточная функция:
- 36. Логарифмическая амплитудно-частотная характеристика строится из выражения Логарифмическая амплитудно-частотная характеристика
- 37. Дифференцирующие звенья Три вида дифференцирующих звеньев со следующими уравнениями: 1) идеальное дифференцирующее звено 2) реальное дифференцирующее
- 38. Переходные характеристики дифференцирующих звеньев
- 39. Частотные характеристики идеального дифференцирующего звена Уравнение идеального дифференцирующего звена в операторной форме: Передаточная функция: Комплексный передаточный
- 40. Логарифмическая амплитудно-частотная характеристика идеального дифференцирующего звена может быть построена из выражения: ЛАЧХ идеального дифференцирующего звена
- 41. Апериодическое (колебательное) звено 2-го порядка где Т – постоянная времени; ρ – коэффициент затухания; k –
- 42. Для построения частотных характеристик уравнение звена необходимо записать в операторной форме Передаточная функция: Комплексный передаточный коэффициент:
- 43. АЧХ ФЧХ
- 44. Амплитудно-фазовые характеристики звена 2-го порядка, т.е. кривые, описываемые вектором W(jɷ) в комплексной плоскости при изменении частоты
- 45. Частотные характеристики систем Рис.1. Разомкнутая система Передаточная функция этой системы: Комплексный передаточный коэффициент: или ЛАЧХ строится
- 46. Поскольку ЛАЧХ обычно строятся упрощённо, суммарную ЛАЧХ разомкнутой системы можно построить непосредственно по передаточной функции. Например,
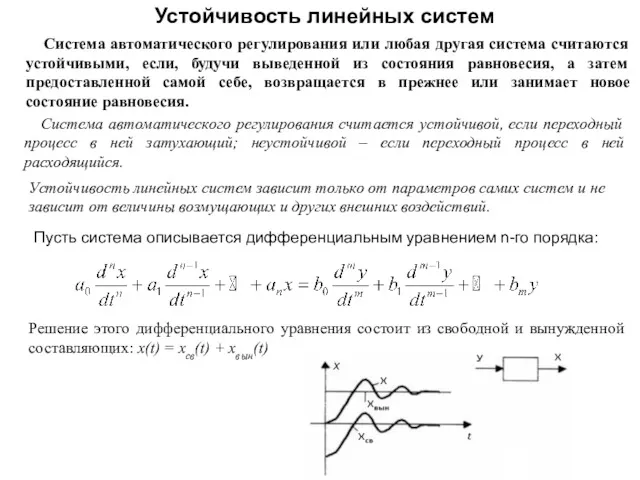
- 47. Устойчивость линейных систем Система автоматического регулирования или любая другая система считаются устойчивыми, если, будучи выведенной из
- 48. Для того чтобы проанализировать систему на устойчивость, достаточно получить хсв, т.е. решить уравнение без правой части:
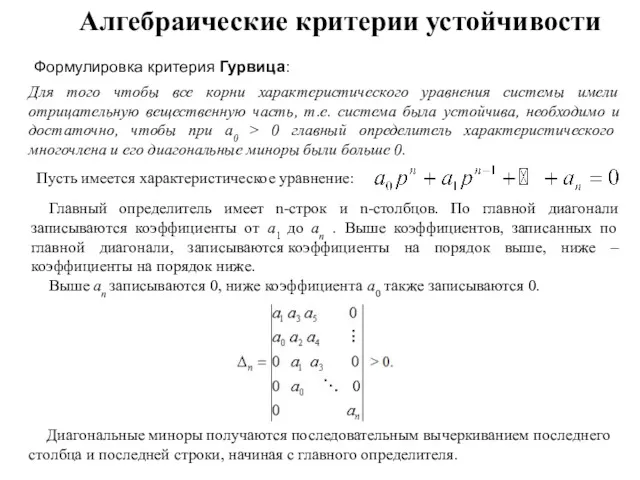
- 49. Алгебраические критерии устойчивости Формулировка критерия Гурвица: Для того чтобы все корни характеристического уравнения системы имели отрицательную
- 50. Пример. Рис. 2.Структурная схема системы Передаточная функция замкнутой системы
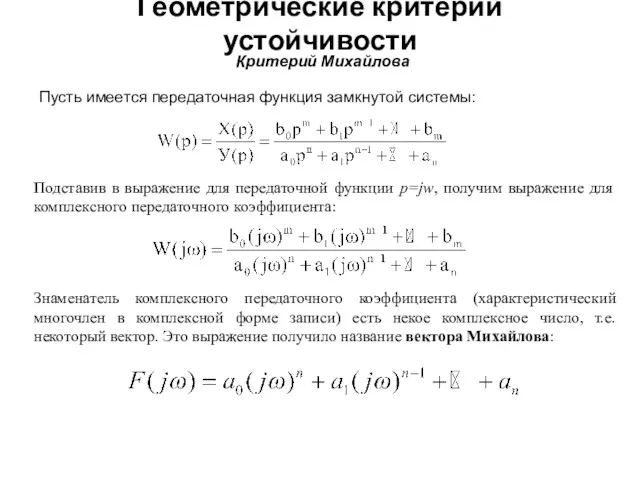
- 51. Геометрические критерии устойчивости Критерий Михайлова Пусть имеется передаточная функция замкнутой системы: Подставив в выражение для передаточной
- 52. а) для устойчивой системы б) для неустойчивой системы
- 53. Критерий Найквиста Для того чтобы замкнутая САР была устойчива, необходимо и достаточно, чтобы а.ф.х. этой системы
- 54. Логарифмический критерий устойчивости Позволяет судить об устойчивости замкнутой САР по логарифмическим амплитудно-частотной и фазово-частотной характеристикам этой
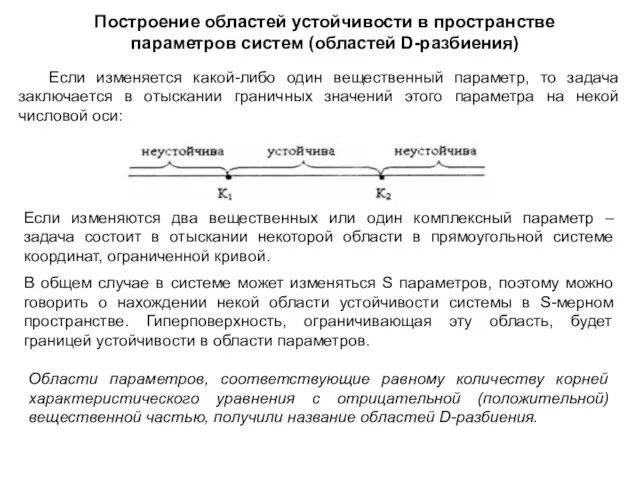
- 55. Построение областей устойчивости в пространстве параметров систем (областей D-разбиения) Если изменяется какой-либо один вещественный параметр, то
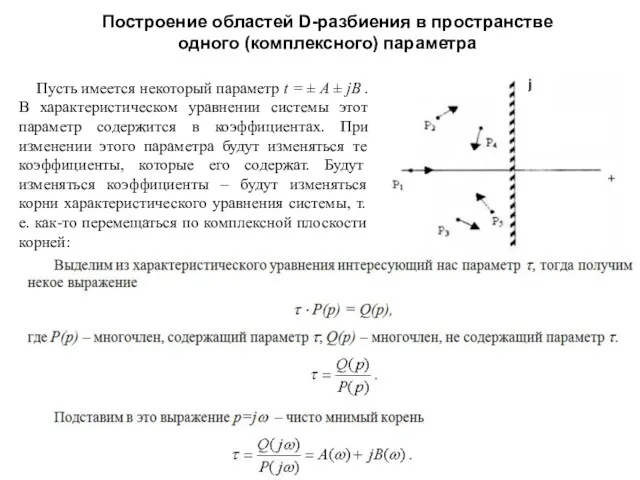
- 56. Построение областей D-разбиения в пространстве одного (комплексного) параметра Пусть имеется некоторый параметр t = ± А
- 57. Подставляя в выражение значения частоты от -∞ до +∞, получим границу областей D-разбиения в плоскости параметра
- 58. Запас устойчивости системы Запас устойчивости предусматривает некоторое удаление расчётных параметров от значений, соответствующих границе устойчивости. Формулировка
- 59. Качество переходного процесса в системах и методы его исследования Качество процесса оценивается следующими основными показателями: 1.
- 60. 3. Быстродействие системы Быстродействие характеризует скорость реагирования САР на внешние воздействия. Для оценки быстродействия используется величина
- 61. 4. Перерегулирование Характеризует отклонение выходного сигнала от установившегося значения в переходном процессе. Оценка идет по максимальному
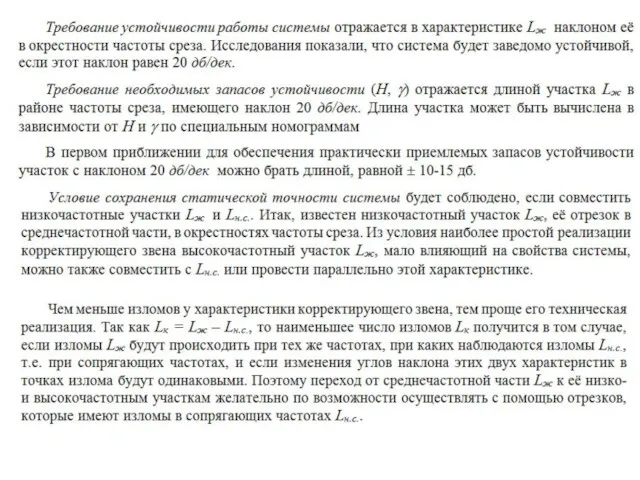
- 62. Коррекция систем автоматического управления Необходимость в коррекции систем возникает при их проектировании или настройке. Обеспечение устойчивой
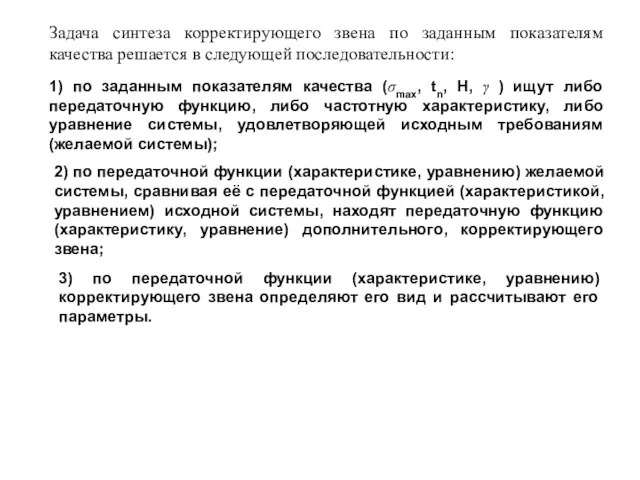
- 63. . Задача синтеза корректирующего звена по заданным показателям качества решается в следующей последовательности: 1) по заданным
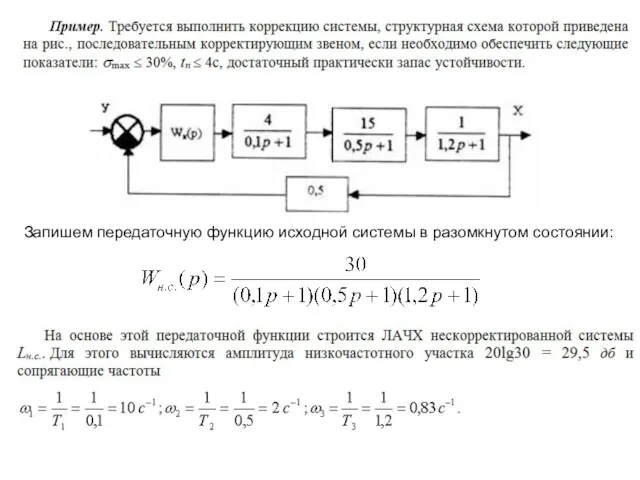
- 64. Синтез последовательного корректирующего звена методом ЛАЧХ Передаточная функция скорректированной (желаемой) системы в разомкнутом состоянии будет иметь
- 65. Синтез последовательного корректирующего звена можно осуществить в следующей последовательности:
- 67. Запишем передаточную функцию исходной системы в разомкнутом состоянии:
- 69. Скачать презентацию
.
Для того чтобы любой простой процесс начал функционировать, необходимо следующее:
1) наличие
.
Для того чтобы любой простой процесс начал функционировать, необходимо следующее:
1) наличие
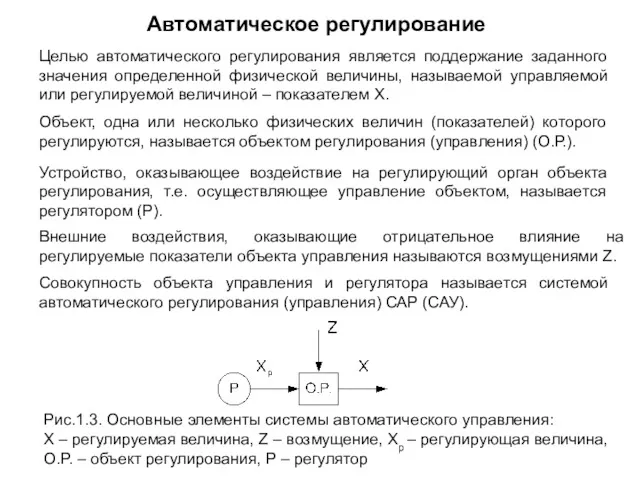
Автоматическое регулирование
Целью автоматического регулирования является поддержание заданного значения определенной физической величины,
Автоматическое регулирование
Целью автоматического регулирования является поддержание заданного значения определенной физической величины,
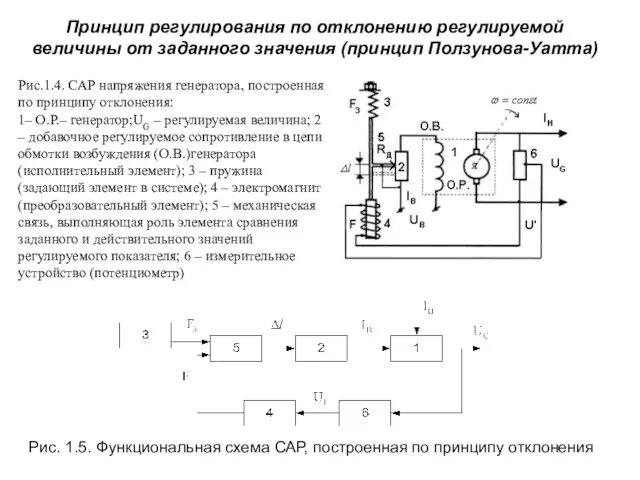
Принцип регулирования по отклонению регулируемой величины от заданного значения (принцип Ползунова-Уатта)
Рис.1.4.
Принцип регулирования по отклонению регулируемой величины от заданного значения (принцип Ползунова-Уатта)
Рис.1.4.
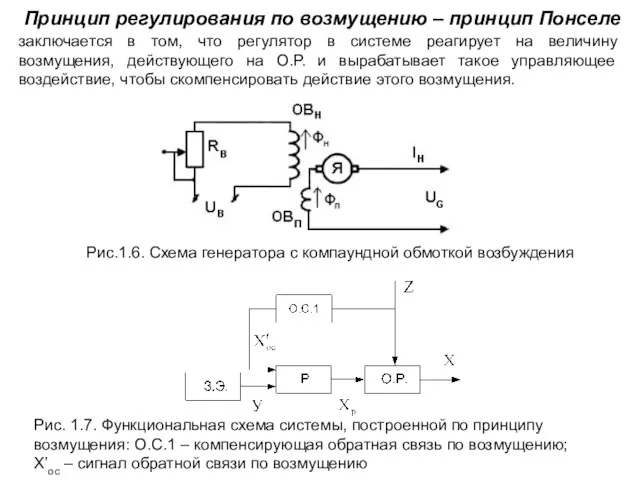
Принцип регулирования по возмущению – принцип Понселе
заключается в том, что регулятор
Принцип регулирования по возмущению – принцип Понселе
заключается в том, что регулятор
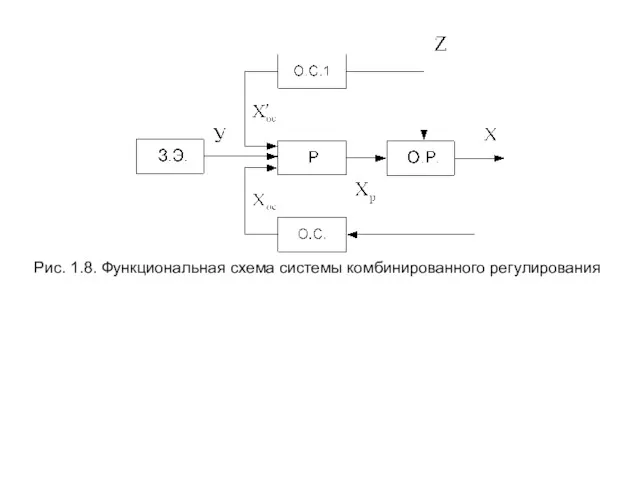
Рис. 1.8. Функциональная схема системы комбинированного регулирования
Рис. 1.8. Функциональная схема системы комбинированного регулирования
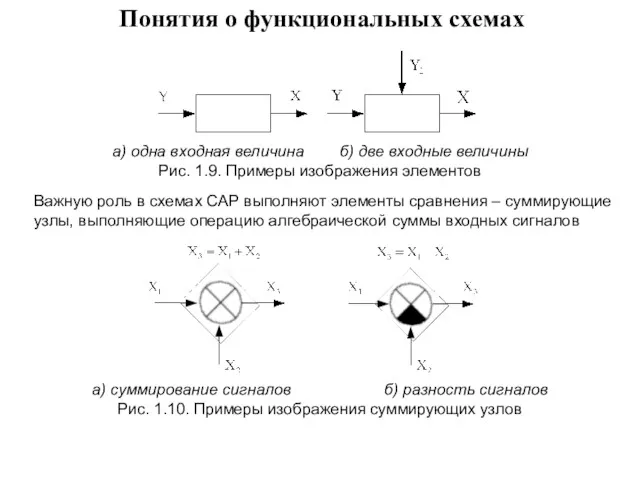
Понятия о функциональных схемах
а) одна входная величина б) две входные величины
Рис.
Понятия о функциональных схемах
а) одна входная величина б) две входные величины
Рис.
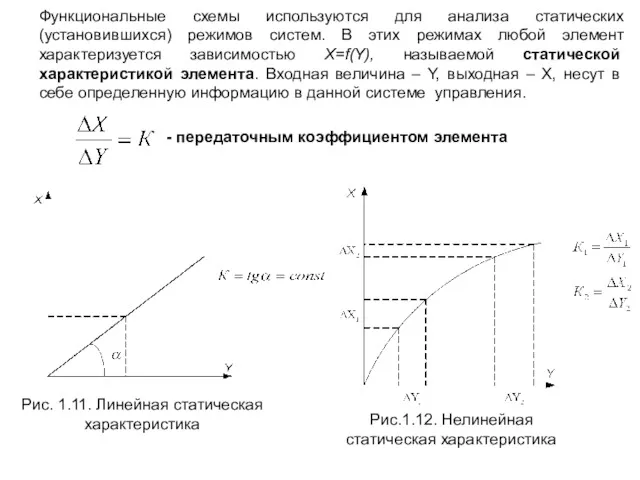
Функциональные схемы используются для анализа статических (установившихся) режимов систем. В этих
Функциональные схемы используются для анализа статических (установившихся) режимов систем. В этих
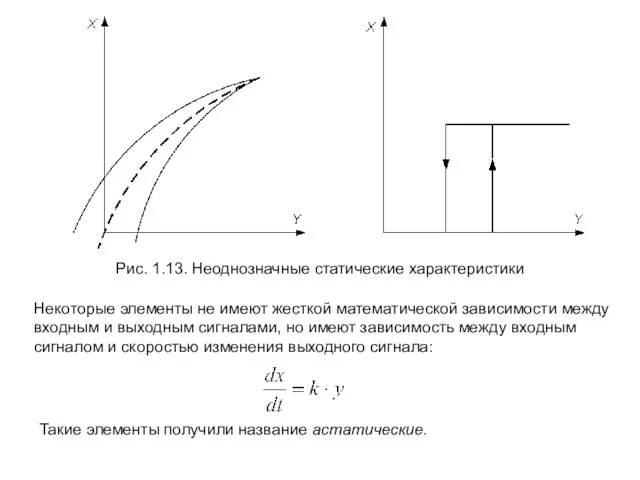
Рис. 1.13. Неоднозначные статические характеристики
Некоторые элементы не имеют жесткой математической зависимости
Рис. 1.13. Неоднозначные статические характеристики
Некоторые элементы не имеют жесткой математической зависимости
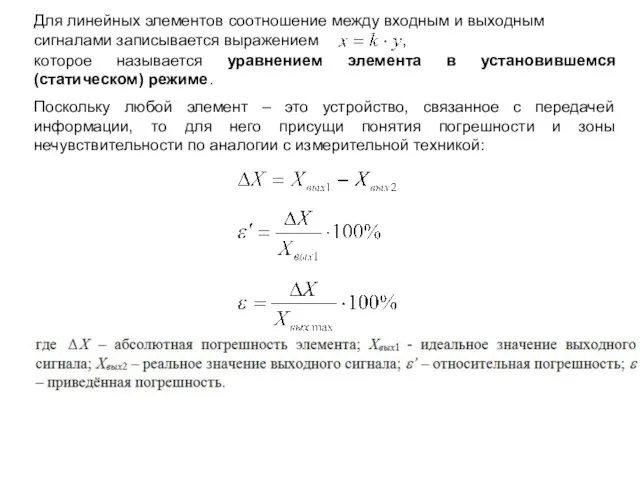
Для линейных элементов соотношение между входным и выходным сигналами записывается выражением
Для линейных элементов соотношение между входным и выходным сигналами записывается выражением
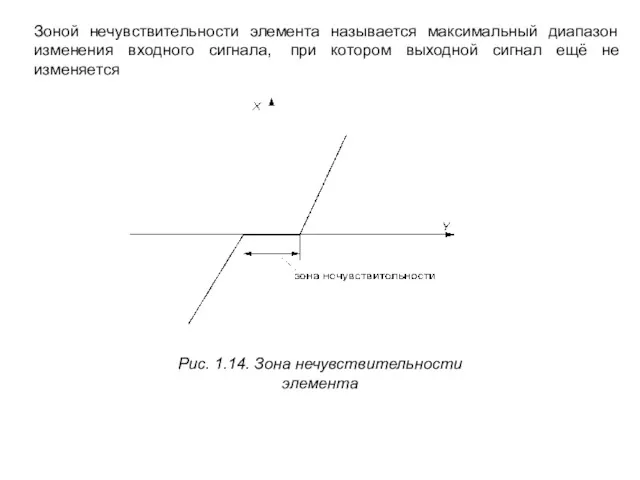
Зоной нечувствительности элемента называется максимальный диапазон изменения входного сигнала, при котором
Зоной нечувствительности элемента называется максимальный диапазон изменения входного сигнала, при котором
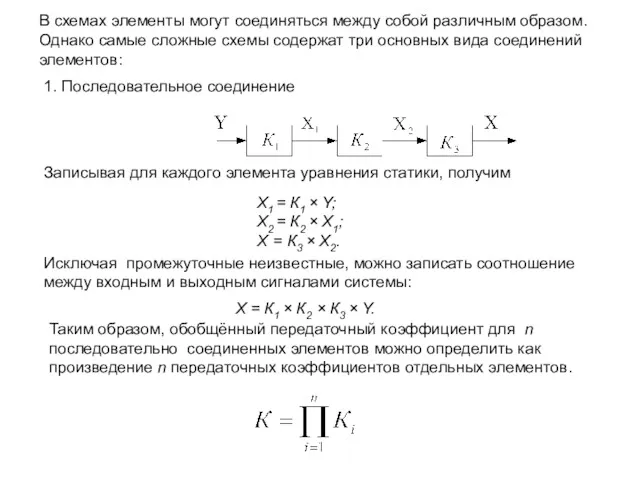
В схемах элементы могут соединяться между собой различным образом. Однако самые
В схемах элементы могут соединяться между собой различным образом. Однако самые
2. Параллельное соединение
Параллельным соединением элементов принято называть такое, в котором на
2. Параллельное соединение
Параллельным соединением элементов принято называть такое, в котором на
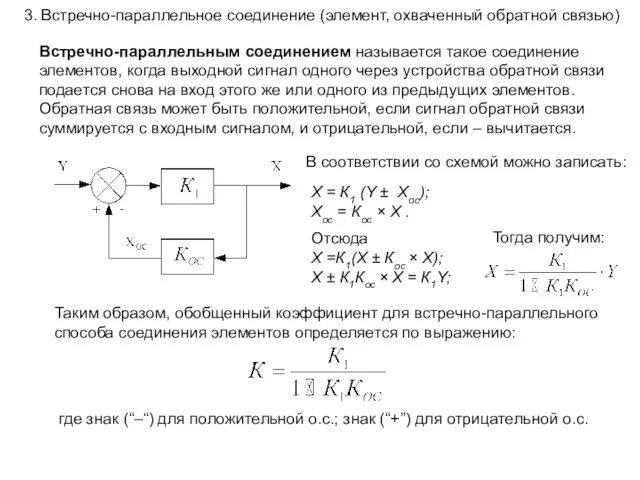
3. Встречно-параллельное соединение (элемент, охваченный обратной связью)
Встречно-параллельным соединением называется такое соединение
3. Встречно-параллельное соединение (элемент, охваченный обратной связью)
Встречно-параллельным соединением называется такое соединение
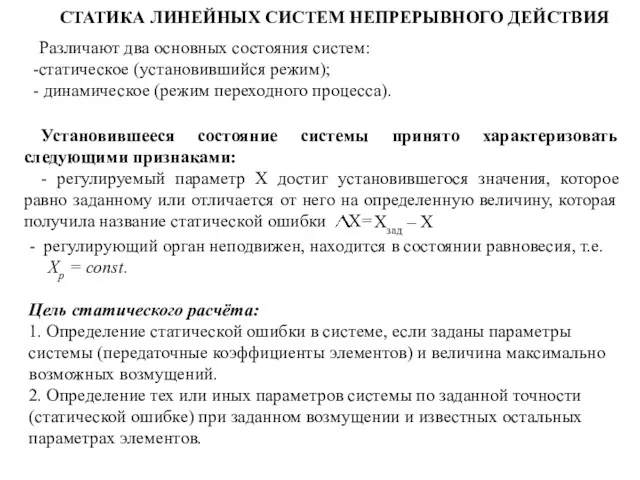
СТАТИКА ЛИНЕЙНЫХ СИСТЕМ НЕПРЕРЫВНОГО ДЕЙСТВИЯ
Различают два основных состояния систем:
статическое (установившийся режим);
СТАТИКА ЛИНЕЙНЫХ СИСТЕМ НЕПРЕРЫВНОГО ДЕЙСТВИЯ
Различают два основных состояния систем:
статическое (установившийся режим);
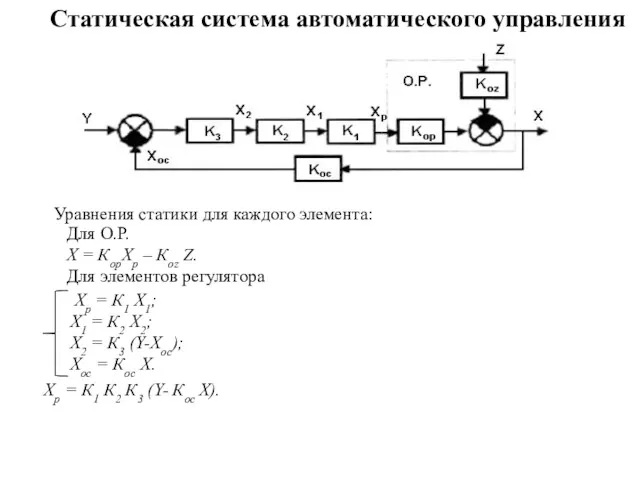
Статическая система автоматического управления
Уравнения статики для каждого элемента:
Для О.Р.
Х = КорХр
Статическая система автоматического управления
Уравнения статики для каждого элемента:
Для О.Р.
Х = КорХр
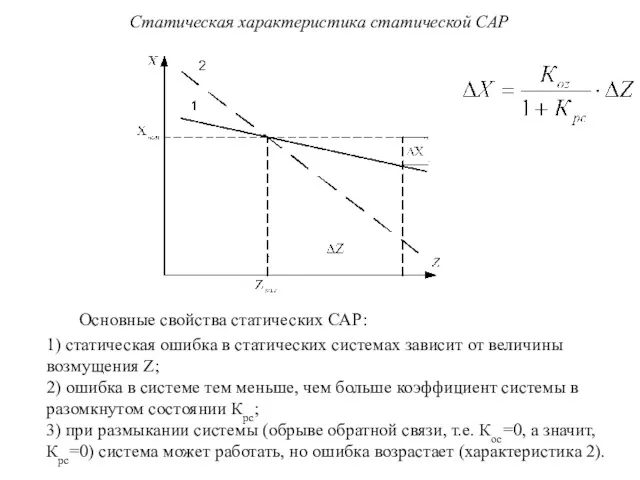
Статическая характеристика статической САР
Основные свойства статических САР:
1) статическая ошибка в статических
Статическая характеристика статической САР
Основные свойства статических САР:
1) статическая ошибка в статических
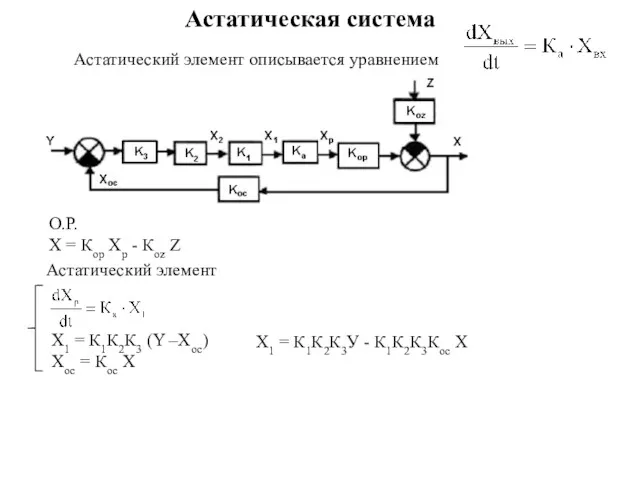
Астатическая система
Астатический элемент описывается уравнением
О.Р.
Х = Кор Хр -
Астатическая система
Астатический элемент описывается уравнением
О.Р.
Х = Кор Хр -
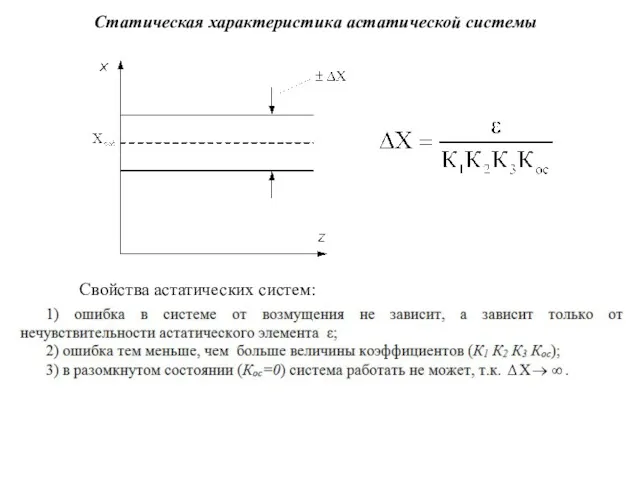
Статическая характеристика астатической системы
Свойства астатических систем:
Статическая характеристика астатической системы
Свойства астатических систем:
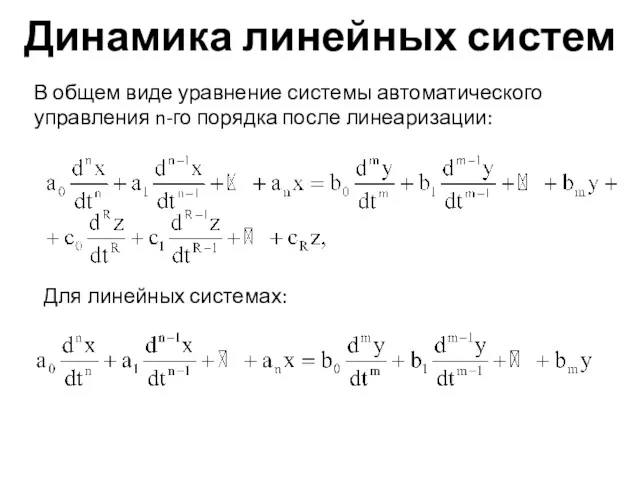
В общем виде уравнение системы автоматического управления n-го порядка после линеаризации:
В общем виде уравнение системы автоматического управления n-го порядка после линеаризации:
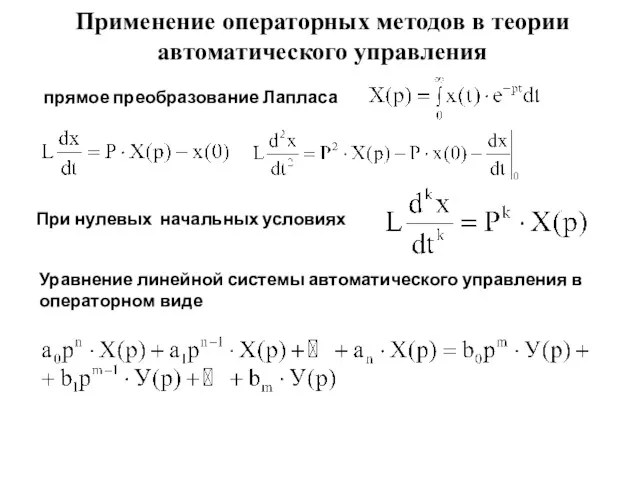
Применение операторных методов в теории автоматического управления
прямое преобразование Лапласа
При нулевых начальных
Применение операторных методов в теории автоматического управления
прямое преобразование Лапласа
При нулевых начальных
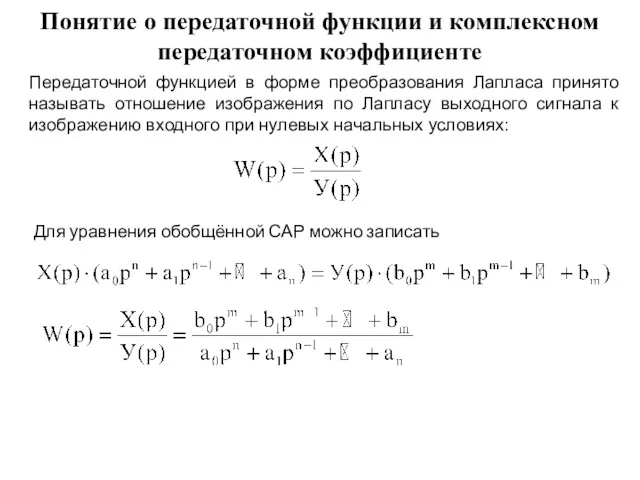
Понятие о передаточной функции и комплексном передаточном коэффициенте
Передаточной функцией в форме
Понятие о передаточной функции и комплексном передаточном коэффициенте
Передаточной функцией в форме
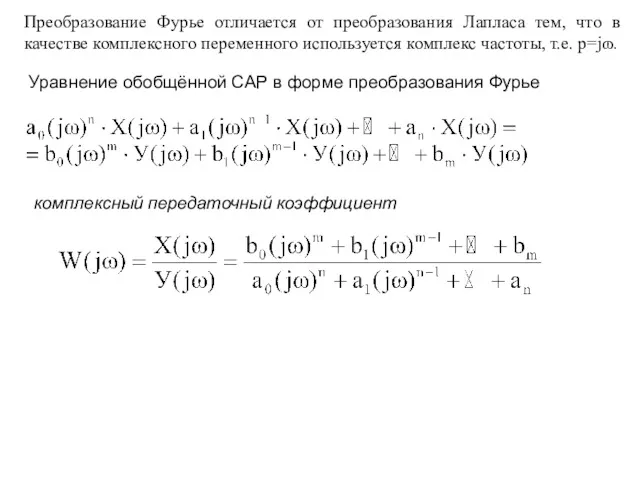
Преобразование Фурье отличается от преобразования Лапласа тем, что в качестве комплексного
Преобразование Фурье отличается от преобразования Лапласа тем, что в качестве комплексного
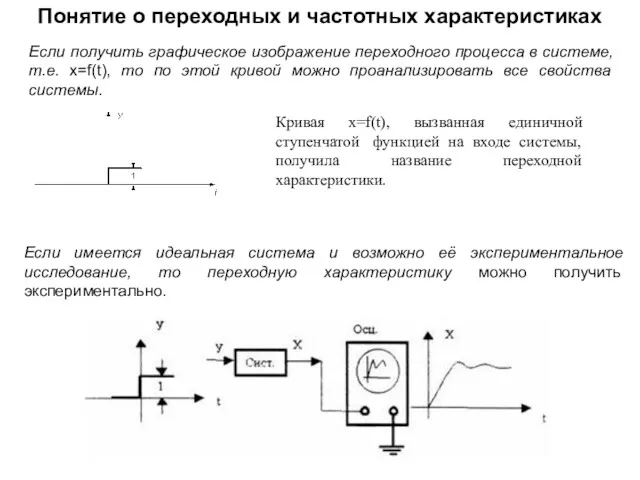
Понятие о переходных и частотных характеристиках
Если получить графическое изображение переходного процесса
Понятие о переходных и частотных характеристиках
Если получить графическое изображение переходного процесса
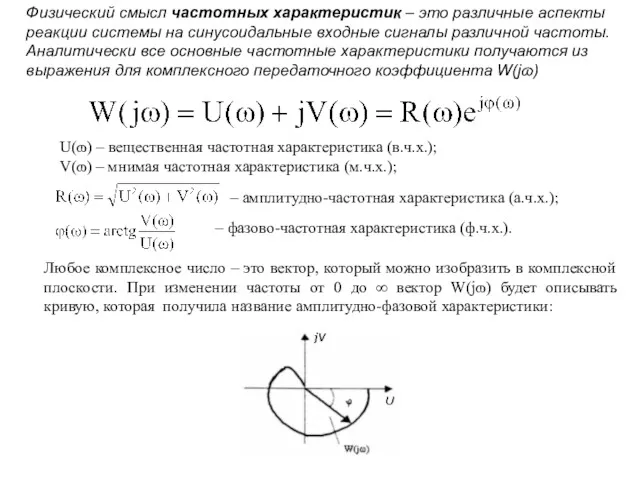
Физический смысл частотных характеристик – это различные аспекты реакции системы на
Физический смысл частотных характеристик – это различные аспекты реакции системы на
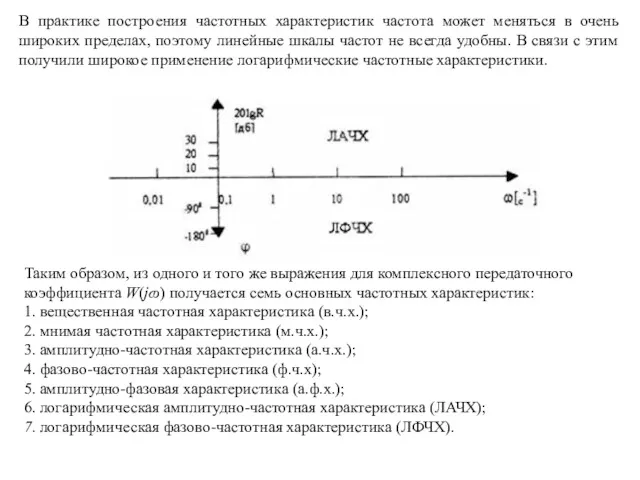
В практике построения частотных характеристик частота может меняться в очень широких
В практике построения частотных характеристик частота может меняться в очень широких
Понятие о структурных схемах
В статике использовалось понятие функциональной схемы, состоящей из
Понятие о структурных схемах
В статике использовалось понятие функциональной схемы, состоящей из
Типовые звенья, их переходные и частотные характеристики
Безынерционное звено
х = к·
Типовые звенья, их переходные и частотные характеристики
Безынерционное звено
х = к·
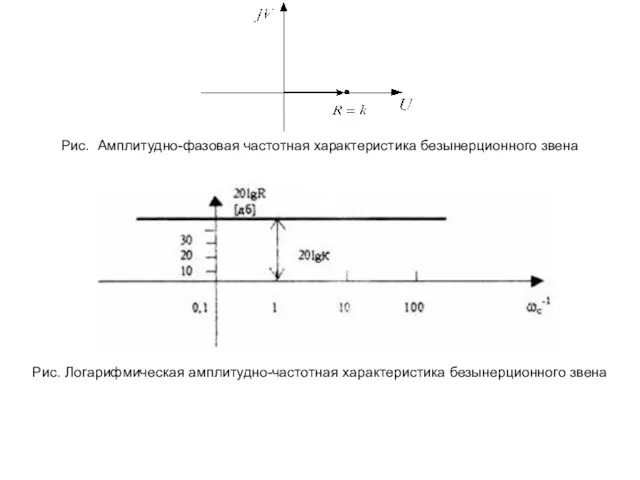
Рис. Амплитудно-фазовая частотная характеристика безынерционного звена
Рис. Логарифмическая амплитудно-частотная характеристика безынерционного звена
Рис. Амплитудно-фазовая частотная характеристика безынерционного звена
Рис. Логарифмическая амплитудно-частотная характеристика безынерционного звена
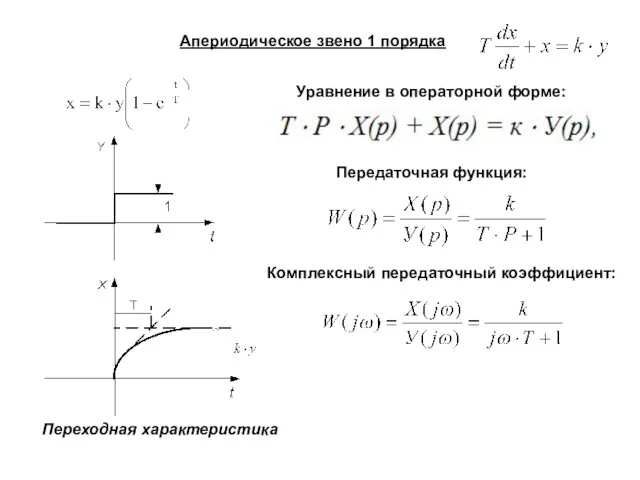
Апериодическое звено 1 порядка
Переходная характеристика
Уравнение в операторной форме:
Передаточная функция:
Комплексный передаточный коэффициент:
Апериодическое звено 1 порядка
Переходная характеристика
Уравнение в операторной форме:
Передаточная функция:
Комплексный передаточный коэффициент:
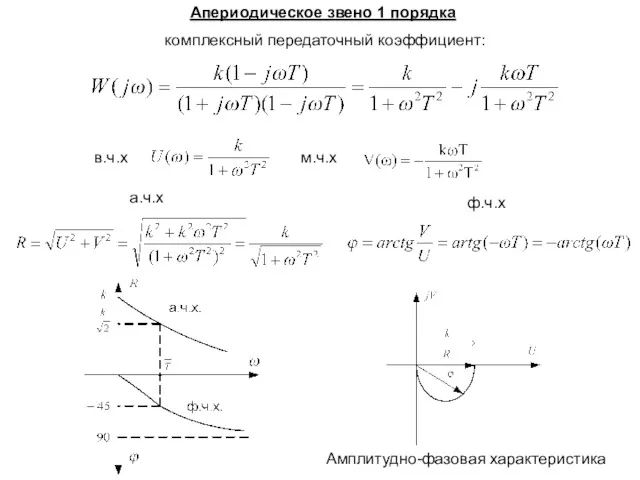
комплексный передаточный коэффициент:
Апериодическое звено 1 порядка
в.ч.х
м.ч.х
а.ч.х
ф.ч.х
Амплитудно-фазовая характеристика
комплексный передаточный коэффициент:
Апериодическое звено 1 порядка
в.ч.х
м.ч.х
а.ч.х
ф.ч.х
Амплитудно-фазовая характеристика
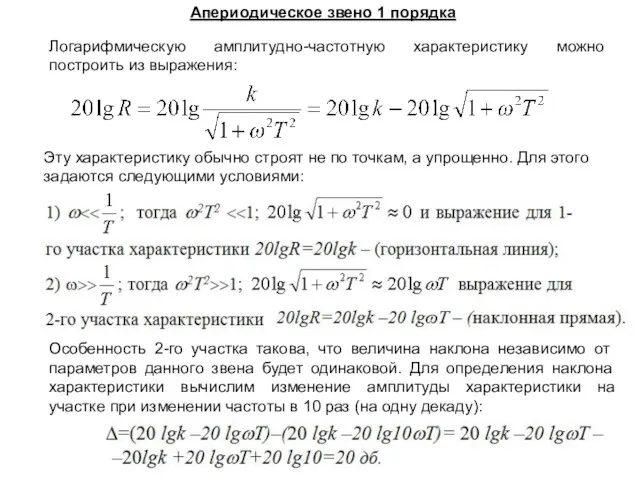
Апериодическое звено 1 порядка
Логарифмическую амплитудно-частотную характеристику можно построить из выражения:
Эту характеристику
Апериодическое звено 1 порядка
Логарифмическую амплитудно-частотную характеристику можно построить из выражения:
Эту характеристику
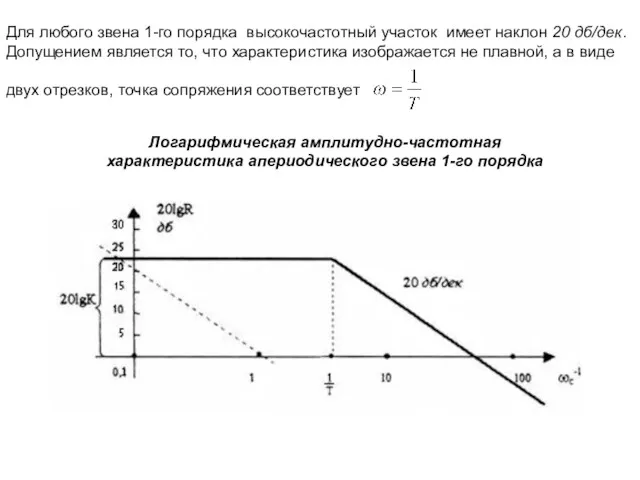
Для любого звена 1-го порядка высокочастотный участок имеет наклон 20 дб/дек.
Для любого звена 1-го порядка высокочастотный участок имеет наклон 20 дб/дек.
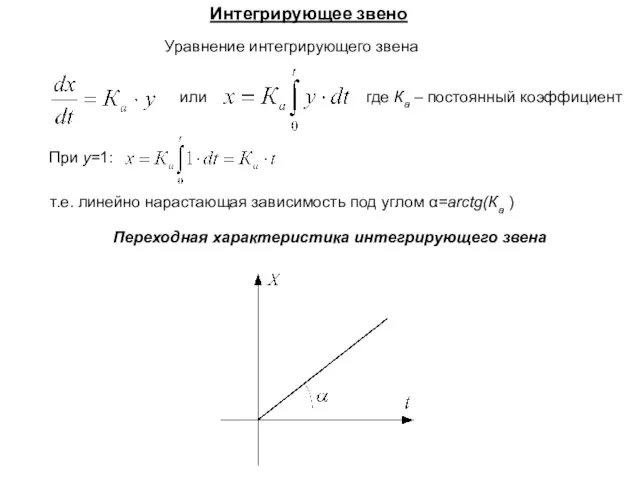
Интегрирующее звено
Уравнение интегрирующего звена
или
где Ка – постоянный коэффициент
При у=1:
т.е. линейно нарастающая
Интегрирующее звено
Уравнение интегрирующего звена
или
где Ка – постоянный коэффициент
При у=1:
т.е. линейно нарастающая
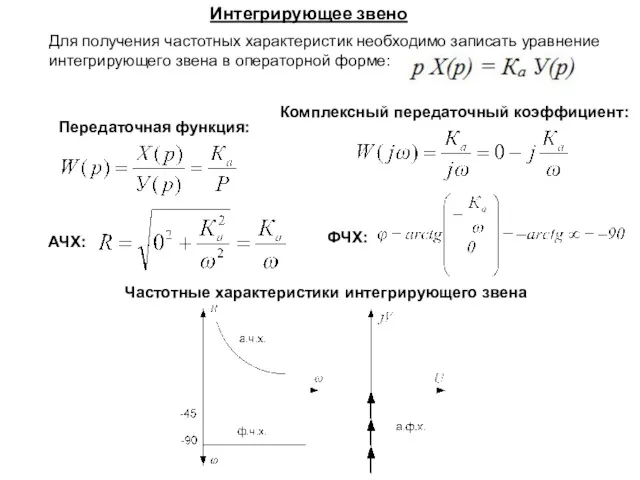
Интегрирующее звено
Для получения частотных характеристик необходимо записать уравнение интегрирующего звена в операторной
Интегрирующее звено
Для получения частотных характеристик необходимо записать уравнение интегрирующего звена в операторной
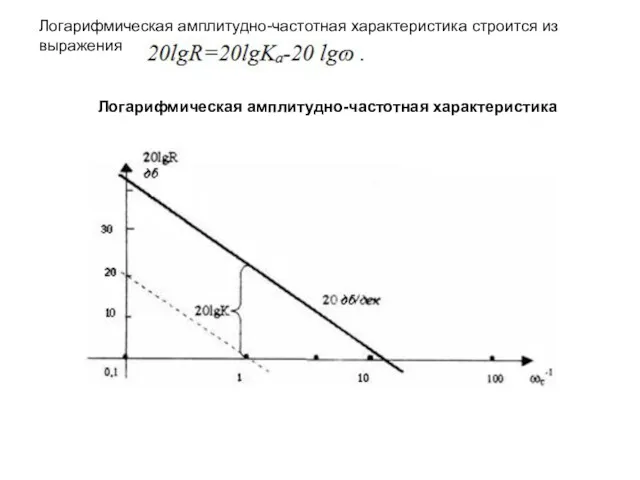
Логарифмическая амплитудно-частотная характеристика строится из выражения
Логарифмическая амплитудно-частотная характеристика
Логарифмическая амплитудно-частотная характеристика строится из выражения
Логарифмическая амплитудно-частотная характеристика
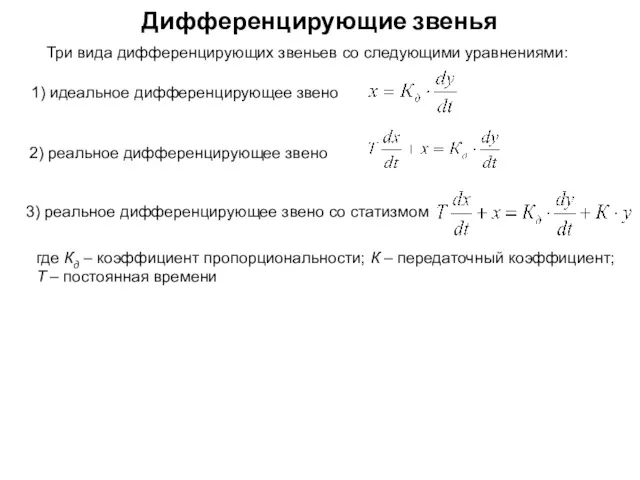
Дифференцирующие звенья
Три вида дифференцирующих звеньев со следующими уравнениями:
1) идеальное дифференцирующее звено
2)
Дифференцирующие звенья
Три вида дифференцирующих звеньев со следующими уравнениями:
1) идеальное дифференцирующее звено
2)
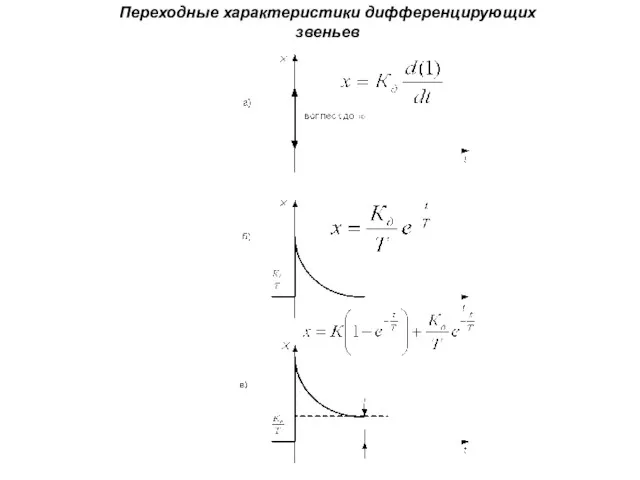
Переходные характеристики дифференцирующих звеньев
Переходные характеристики дифференцирующих звеньев
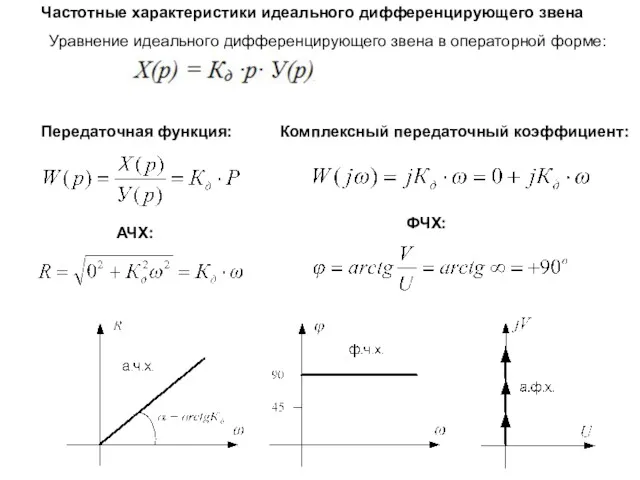
Частотные характеристики идеального дифференцирующего звена
Уравнение идеального дифференцирующего звена в операторной форме:
Передаточная
Частотные характеристики идеального дифференцирующего звена
Уравнение идеального дифференцирующего звена в операторной форме:
Передаточная
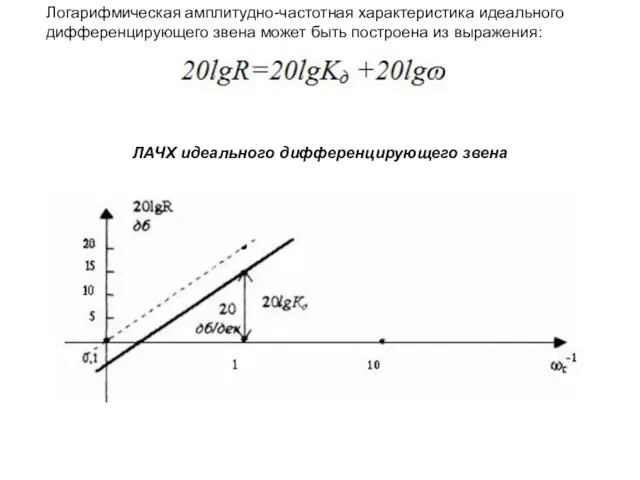
Логарифмическая амплитудно-частотная характеристика идеального дифференцирующего звена может быть построена из выражения:
ЛАЧХ
Логарифмическая амплитудно-частотная характеристика идеального дифференцирующего звена может быть построена из выражения:
ЛАЧХ
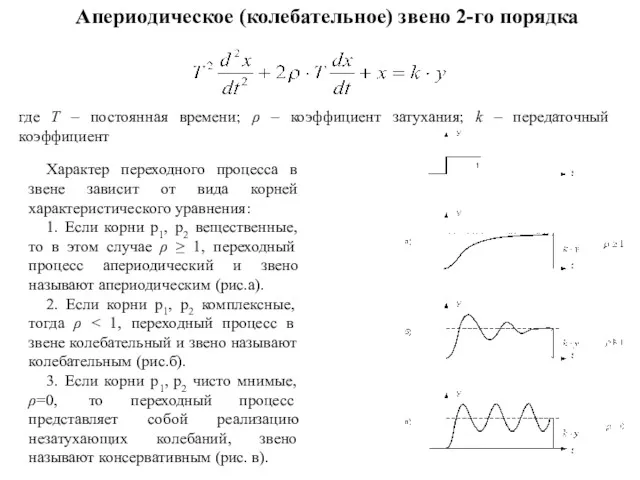
Апериодическое (колебательное) звено 2-го порядка
где Т – постоянная времени; ρ –
Апериодическое (колебательное) звено 2-го порядка
где Т – постоянная времени; ρ –
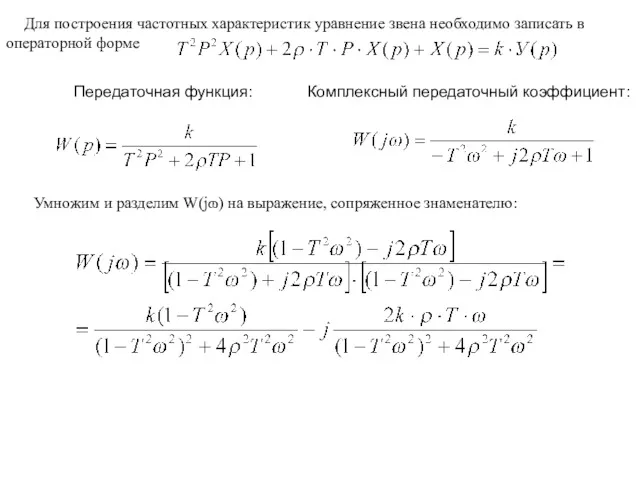
Для построения частотных характеристик уравнение звена необходимо записать в операторной форме
Передаточная
Для построения частотных характеристик уравнение звена необходимо записать в операторной форме
Передаточная
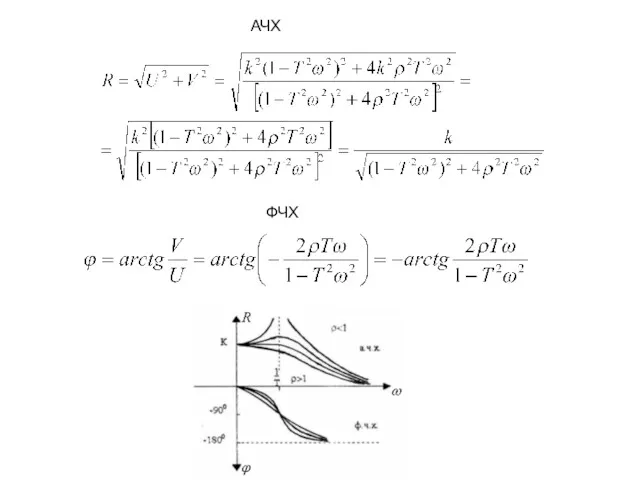
АЧХ
ФЧХ
АЧХ
ФЧХ
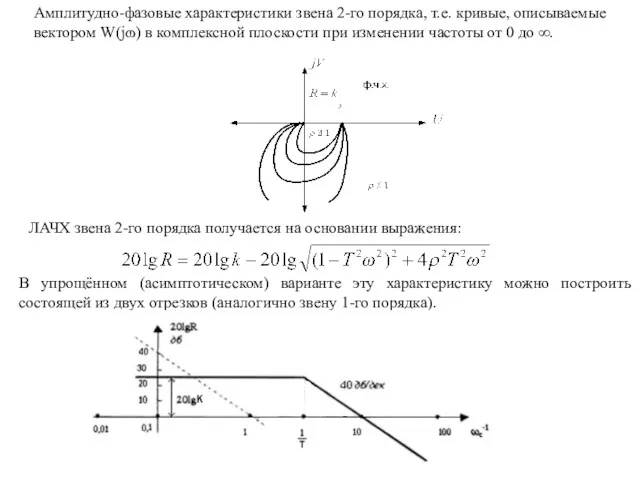
Амплитудно-фазовые характеристики звена 2-го порядка, т.е. кривые, описываемые вектором W(jɷ) в
Амплитудно-фазовые характеристики звена 2-го порядка, т.е. кривые, описываемые вектором W(jɷ) в
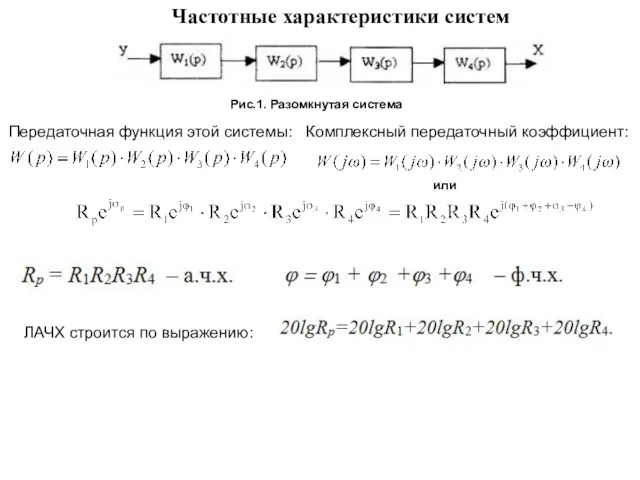
Частотные характеристики систем
Рис.1. Разомкнутая система
Передаточная функция этой системы:
Комплексный передаточный коэффициент:
или
ЛАЧХ строится
Частотные характеристики систем
Рис.1. Разомкнутая система
Передаточная функция этой системы:
Комплексный передаточный коэффициент:
или
ЛАЧХ строится
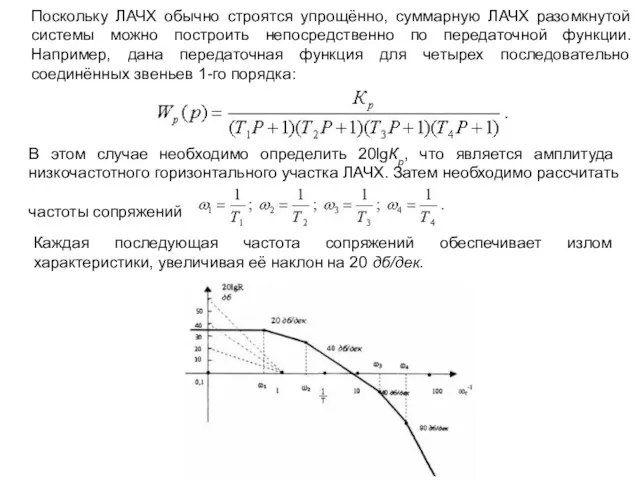
Поскольку ЛАЧХ обычно строятся упрощённо, суммарную ЛАЧХ разомкнутой системы можно построить
Поскольку ЛАЧХ обычно строятся упрощённо, суммарную ЛАЧХ разомкнутой системы можно построить
Устойчивость линейных систем
Система автоматического регулирования или любая другая система считаются устойчивыми,
Устойчивость линейных систем
Система автоматического регулирования или любая другая система считаются устойчивыми,
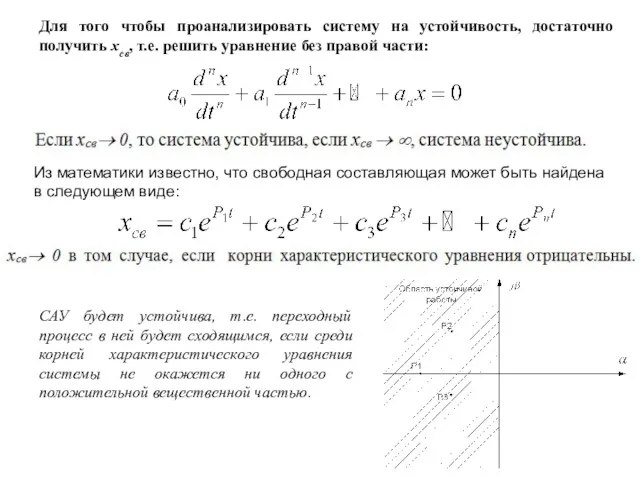
Для того чтобы проанализировать систему на устойчивость, достаточно получить хсв,
Для того чтобы проанализировать систему на устойчивость, достаточно получить хсв,
Алгебраические критерии устойчивости
Формулировка критерия Гурвица:
Для того чтобы все корни характеристического уравнения
Алгебраические критерии устойчивости
Формулировка критерия Гурвица:
Для того чтобы все корни характеристического уравнения
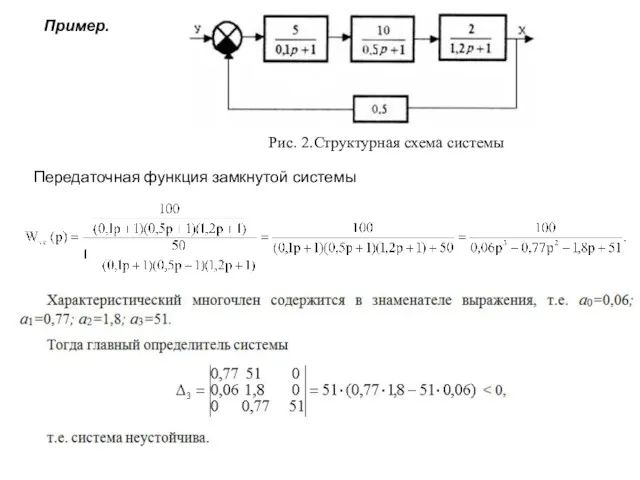
Пример.
Рис. 2.Структурная схема системы
Передаточная функция замкнутой системы
Пример.
Рис. 2.Структурная схема системы
Передаточная функция замкнутой системы
Геометрические критерии устойчивости
Критерий Михайлова
Пусть имеется передаточная функция замкнутой системы:
Подставив в выражение
Геометрические критерии устойчивости
Критерий Михайлова
Пусть имеется передаточная функция замкнутой системы:
Подставив в выражение
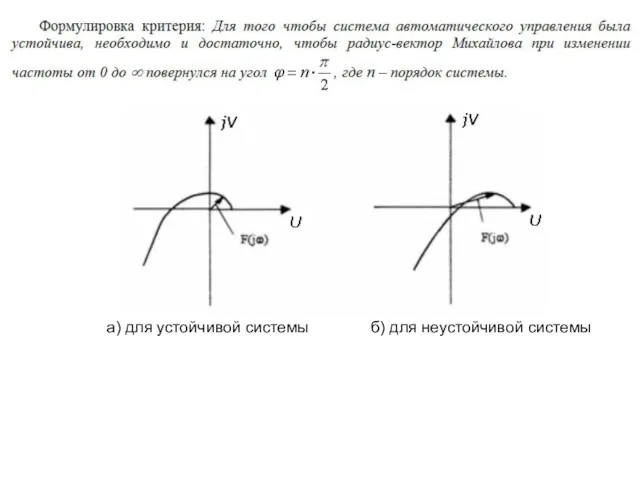
а) для устойчивой системы б) для неустойчивой системы
а) для устойчивой системы б) для неустойчивой системы
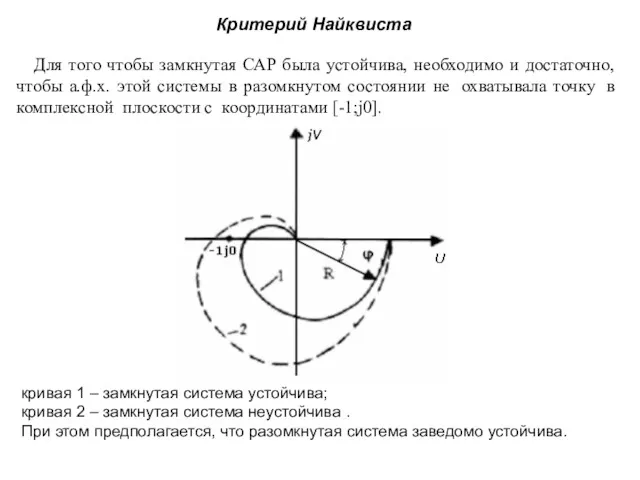
Критерий Найквиста
Для того чтобы замкнутая САР была устойчива, необходимо и достаточно,
Критерий Найквиста
Для того чтобы замкнутая САР была устойчива, необходимо и достаточно,
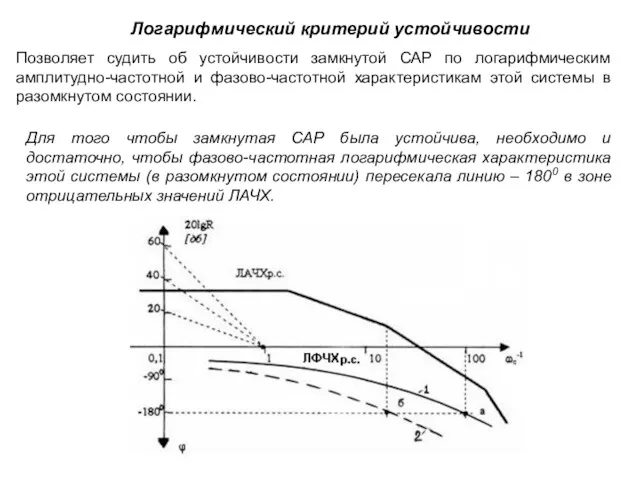
Логарифмический критерий устойчивости
Позволяет судить об устойчивости замкнутой САР по логарифмическим амплитудно-частотной
Логарифмический критерий устойчивости
Позволяет судить об устойчивости замкнутой САР по логарифмическим амплитудно-частотной
Построение областей устойчивости в пространстве
параметров систем (областей D-разбиения)
Если изменяется какой-либо
Построение областей устойчивости в пространстве
параметров систем (областей D-разбиения)
Если изменяется какой-либо
Построение областей D-разбиения в пространстве
одного (комплексного) параметра
Пусть имеется некоторый параметр
Построение областей D-разбиения в пространстве
одного (комплексного) параметра
Пусть имеется некоторый параметр
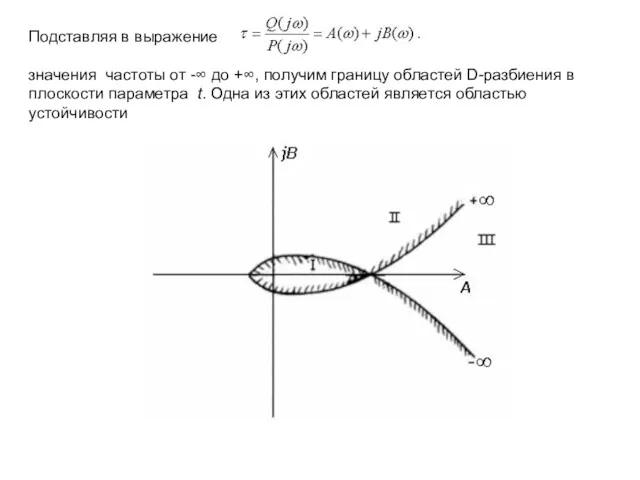
Подставляя в выражение
значения частоты от -∞ до +∞, получим границу областей
Подставляя в выражение
значения частоты от -∞ до +∞, получим границу областей
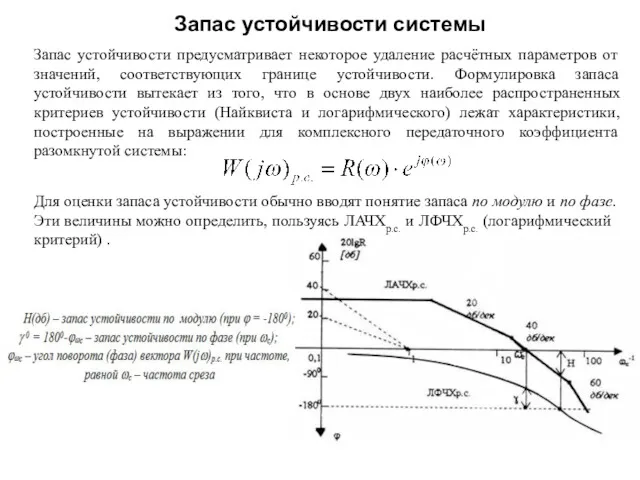
Запас устойчивости системы
Запас устойчивости предусматривает некоторое удаление расчётных параметров от значений,
Запас устойчивости системы
Запас устойчивости предусматривает некоторое удаление расчётных параметров от значений,
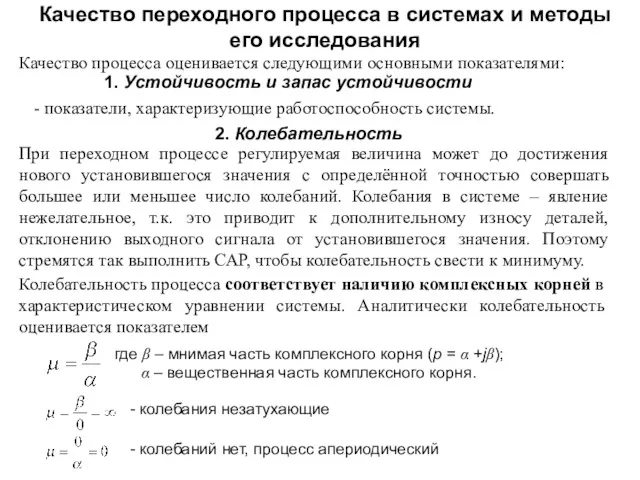
Качество переходного процесса в системах и методы его исследования
Качество процесса оценивается
Качество переходного процесса в системах и методы его исследования
Качество процесса оценивается
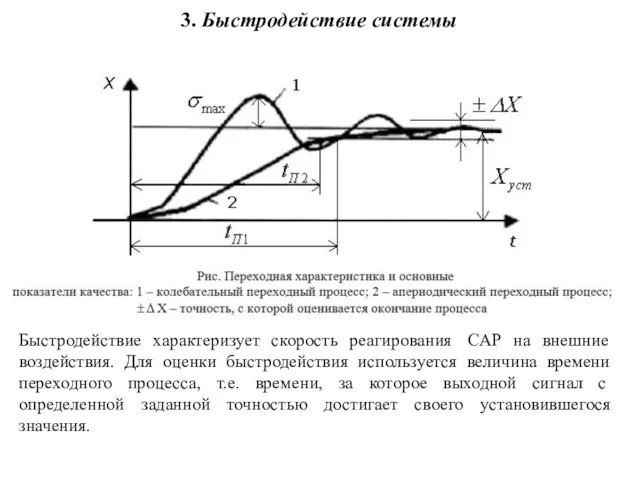
3. Быстродействие системы
Быстродействие характеризует скорость реагирования САР на внешние воздействия. Для
3. Быстродействие системы
Быстродействие характеризует скорость реагирования САР на внешние воздействия. Для
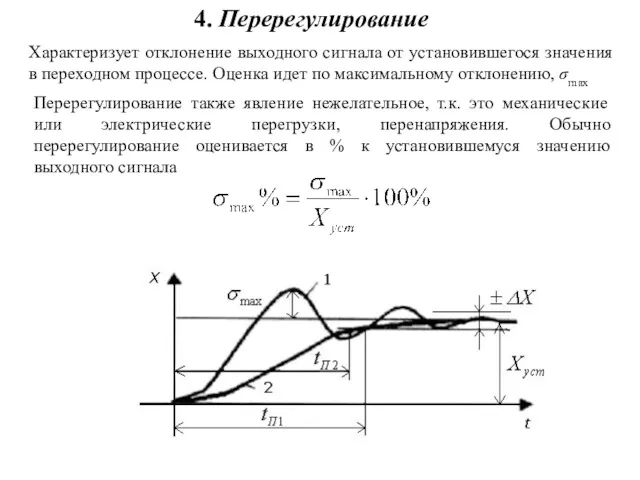
4. Перерегулирование
Характеризует отклонение выходного сигнала от установившегося значения в переходном процессе.
4. Перерегулирование
Характеризует отклонение выходного сигнала от установившегося значения в переходном процессе.
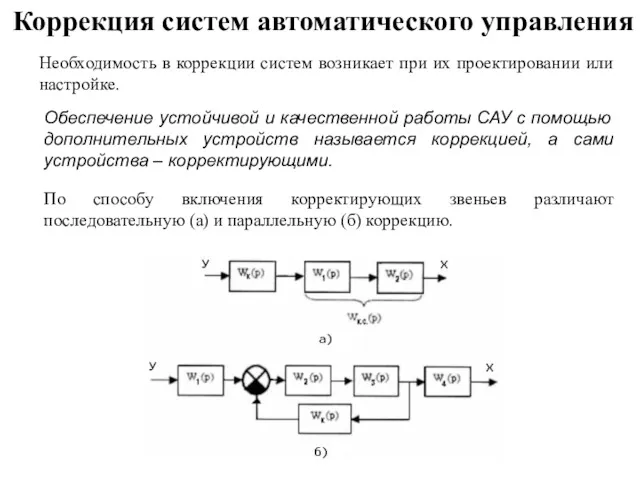
Коррекция систем автоматического управления
Необходимость в коррекции систем возникает при их проектировании
Коррекция систем автоматического управления
Необходимость в коррекции систем возникает при их проектировании
.
Задача синтеза корректирующего звена по заданным показателям качества решается в следующей
.
Задача синтеза корректирующего звена по заданным показателям качества решается в следующей
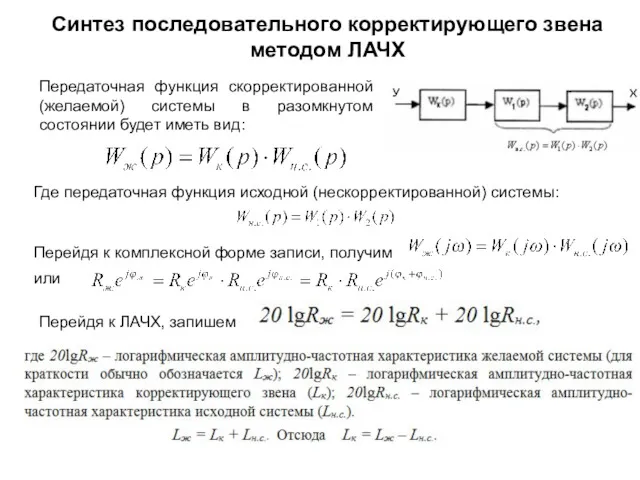
Синтез последовательного корректирующего звена методом ЛАЧХ
Передаточная функция скорректированной (желаемой) системы в
Синтез последовательного корректирующего звена методом ЛАЧХ
Передаточная функция скорректированной (желаемой) системы в
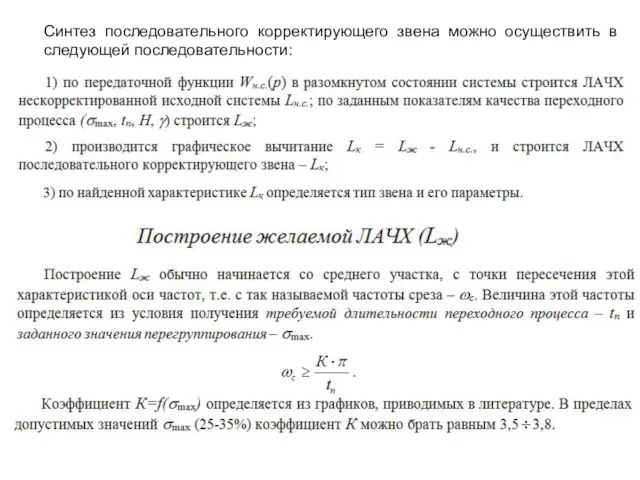
Синтез последовательного корректирующего звена можно осуществить в следующей последовательности:
Синтез последовательного корректирующего звена можно осуществить в следующей последовательности:
Запишем передаточную функцию исходной системы в разомкнутом состоянии:
Запишем передаточную функцию исходной системы в разомкнутом состоянии:
 Первый закон термодинамики
Первый закон термодинамики Повітряний транспорт
Повітряний транспорт Солнечные источники энергии. Солнечные батареи
Солнечные источники энергии. Солнечные батареи Теория деформаций. Лекция 4
Теория деформаций. Лекция 4 Термодинамика. Законы термодинамики
Термодинамика. Законы термодинамики Сопротивление. Закон Ома
Сопротивление. Закон Ома Техническая эксплуатация машинно-транспортного парка
Техническая эксплуатация машинно-транспортного парка Катушка Теслы
Катушка Теслы Посвящение в юные физики
Посвящение в юные физики Техническое обслуживание и диагностирование неисправностей сельскохозяйственных машин, ремонт отдельных деталей и узлов
Техническое обслуживание и диагностирование неисправностей сельскохозяйственных машин, ремонт отдельных деталей и узлов Источники звука. Звуковые волны. 9 класс
Источники звука. Звуковые волны. 9 класс Инструментальные методы исследования органических веществ. Лекция 11
Инструментальные методы исследования органических веществ. Лекция 11 Транспортная энергетика. Лекция 5. Термодинамика газового потока
Транспортная энергетика. Лекция 5. Термодинамика газового потока Законы Ньютона. 10 класс
Законы Ньютона. 10 класс Механическая работа
Механическая работа Решение краевых задач для уравнения теплопроводности
Решение краевых задач для уравнения теплопроводности Композитные материалы
Композитные материалы Методы разделения и концентрирования. Хроматография
Методы разделения и концентрирования. Хроматография Потенциал. Решение задач
Потенциал. Решение задач Детали машин и основы конструирования. Цепные передачи. (Лекция 6)
Детали машин и основы конструирования. Цепные передачи. (Лекция 6) Статистические и термодинамические свойства макросистем
Статистические и термодинамические свойства макросистем Расчет гармонических колебаний в электрических цепях
Расчет гармонических колебаний в электрических цепях Презентация Спектры (качественные задачи по теме Излучения и спектры)
Презентация Спектры (качественные задачи по теме Излучения и спектры) Презентация по физике Механические колебания
Презентация по физике Механические колебания Лекция 1-01 (2024)
Лекция 1-01 (2024) BRAIN-RING ФИЗИКИ
BRAIN-RING ФИЗИКИ Определение мощности. Лабораторная работа
Определение мощности. Лабораторная работа Энергия
Энергия