- Раскрытие статической неопределимости стержневых систем методом сил. Лекция 8

Содержание
- 2. Кинематический анализ плоских стержневых систем. Статически неопределимые рамы и балки. Ранее в лекциях мы частично рассматривали
- 3. Под стержневой системой в широком смысле слова понимается всякая конструкция, состоящая из элементов, имеющих форму стержня.
- 4. Если элементы стержневой системы работают в основном на изгиб или кручение, то система называется рамой (рис.
- 5. Плоскопространственные системы. Для такого рода систем оси составляющих элементов в недеформированном состоянии располагаются, как и для
- 6. Рамы и фермы принято разделять на статически определимые и статически неопределимые. Под статически определимой понимается такая
- 7. Разность между числом неизвестных (реакций опор и внутренних силовых факторов) и числом независимых уравнений статики, которые
- 8. Положение жесткого тела в пространстве определяется шестью независимыми координатами, иначе говоря, жесткий стержень обладает шестью степенями
- 9. Следовательно, если на свободный жесткий стержень наложено шесть связей, то положение его в пространстве будет, за
- 10. Связи в рамах и стержневых системах делят обычно на связи внешние и связи внутренние, или взаимные.
- 11. Рис.3 Заделка в плоской системе дает три внешние связи. Пространственная заделка соответствует шести внешним связям (рис.
- 12. Рис.4 Следовательно, в первом случае рама имеет необходимые внешние связи, а во втором, кроме того, две
- 13. Так, например, плоская рама, показанная на рис. 5, а, имеет необходимое количество как внешних, так и
- 14. В той же раме, показанной на рис. 5б, кроме внешних наложены две дополнительные внутренние связи, запрещающие
- 15. Рис.6 Следовательно, разрезая замкнутую раму, мы снимаем дополнительные связи, т. е. позволяем сечениям А и В
- 16. Рассмотрим несколько примеров определения степени статической неопределимости стержневых и рамных систем. На рис. 7, а—и показано
- 17. а.) Рама имеет четыре дополнительные внешние связи и три внутренние связи, т. е. семь раз статически
- 18. Рис.8 Обобщая сказанное, можно сделать вывод, что шарнир снимает число связей, на единицу меньшее числа сходящихся
- 19. г.) Рама три раза статически неопределима. д.) Внешние связи не удовлетворяют условиям кинематической неизменяемости. Это —
- 20. е.) Рама — пространственная. Имеется шесть дополнительных внешних связей (лишняя заделка) и шесть дополнительных взаимных связей
- 21. и.) Здесь также рассматриваются только внутренние связи, поскольку система внешних сил удовлетворяет условиям равновесия. Нужно подсчитать,
- 22. Метод сил. Уравнения метода сил Выбор основной системы Наиболее применяемым методом раскрытия статической неопределимости стержневых и
- 23. Такой прием не является единственно возможным. В строительной механике широко применяются и другие методы, например метод
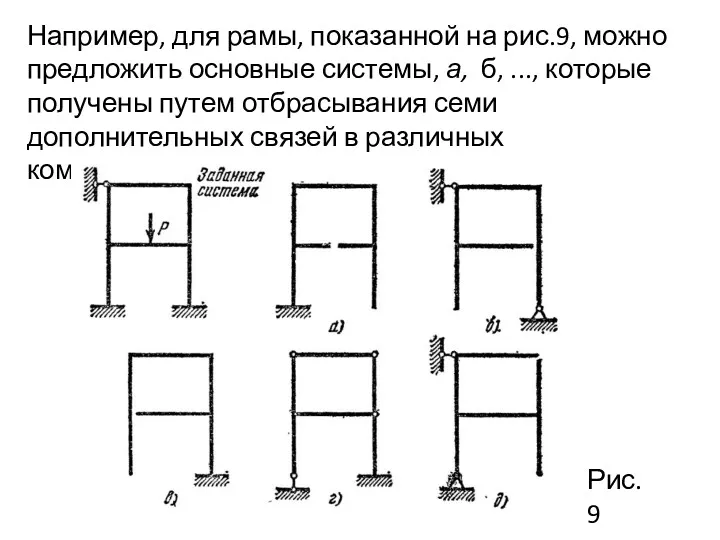
- 24. Например, для рамы, показанной на рис.9, можно предложить основные системы, а, б, ..., которые получены путем
- 25. Вместе с тем нужно помнить, что не всякая система с семью отброшенными связями может быть принята
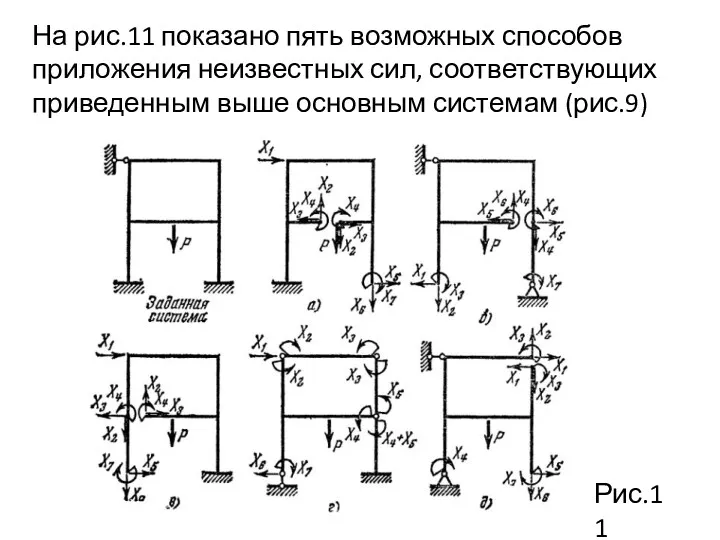
- 27. На рис.11 показано пять возможных способов приложения неизвестных сил, соответствующих приведенным выше основным системам (рис.9) Рис.11
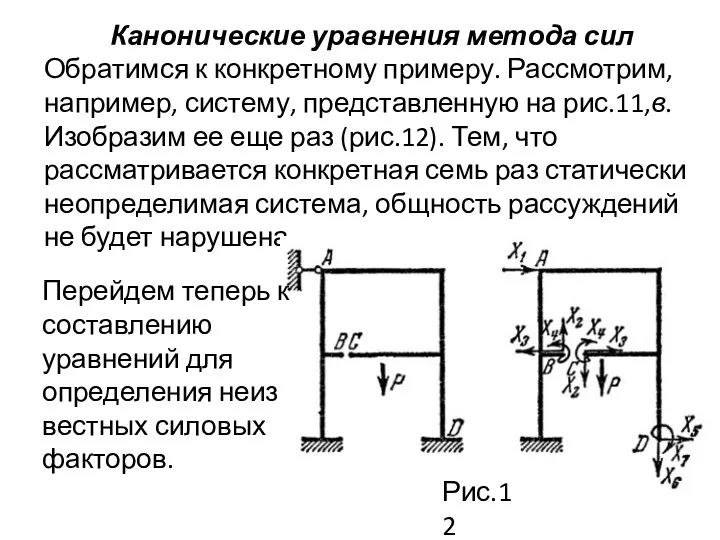
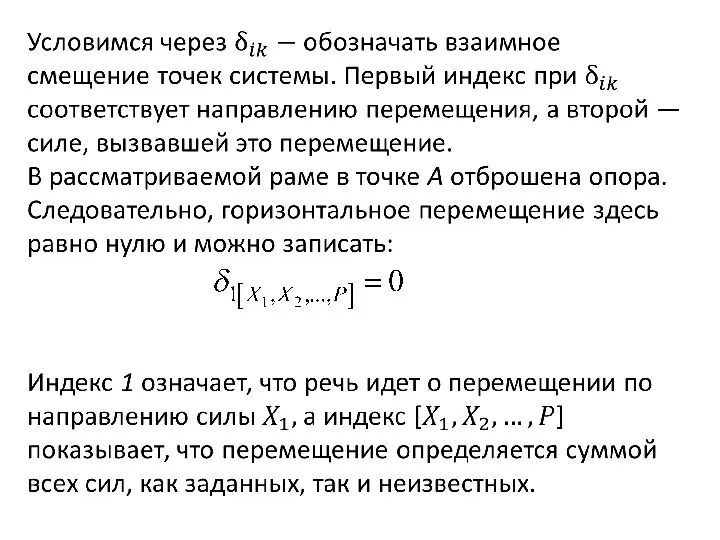
- 28. Канонические уравнения метода сил Обратимся к конкретному примеру. Рассмотрим, например, систему, представленную на рис.11,в. Изобразим ее
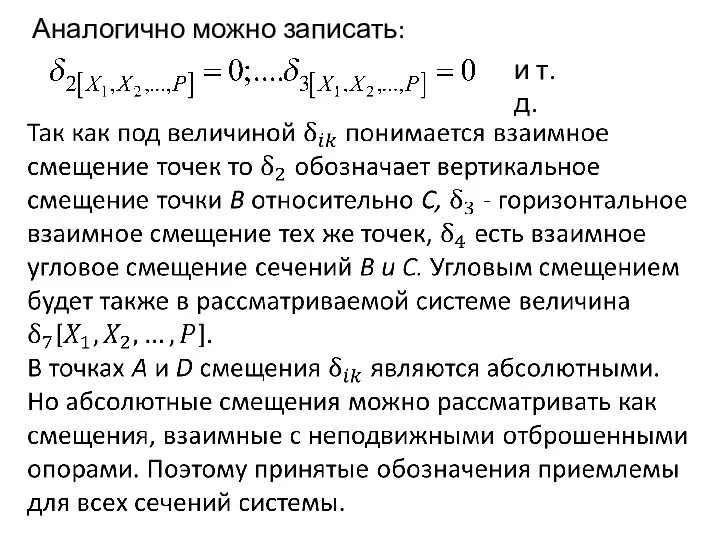
- 30. Аналогично можно записать: и т.д.
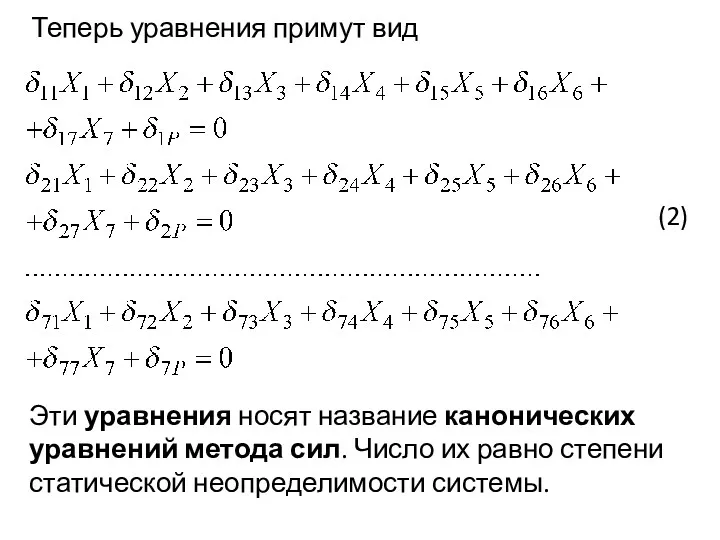
- 33. Теперь уравнения примут вид (2) Эти уравнения носят название канонических уравнений метода сил. Число их равно
- 35. Рис.13
- 36. Рис.14
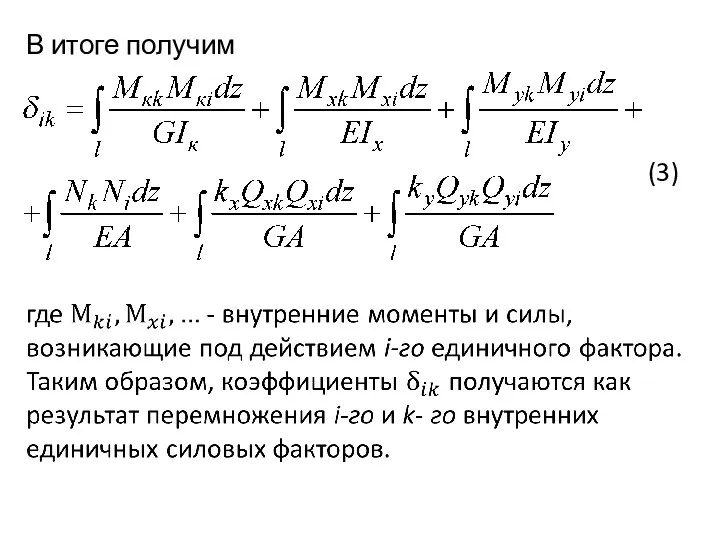
- 37. В итоге получим (3)
- 40. Использование свойств симметрии и косой симметрии при раскрытии статической неопределимости Пусть имеется симметричная рама (рис. 15).
- 41. Рассмотрим случаи нагружения рамы симметричной и кососимметричной нагрузками. Под симметричной нагрузкой будем понимать такую, при которой
- 42. Аналогично классифицируем и внутренние силовые факторы. Рассмотрим для этого некоторое произвольное сечение рамы, в котором возникает
- 43. Такими оказываются три: два изгибающих момента и нормальная сила. Будем их называть симметричными внутренними факторами. Крутящий
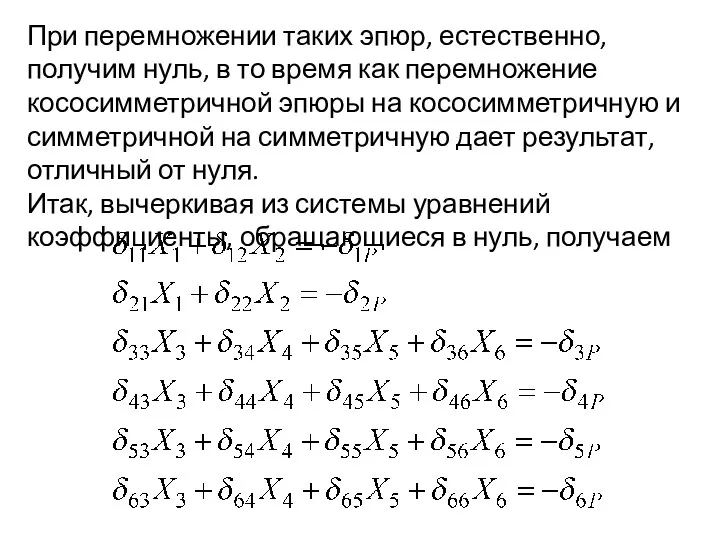
- 45. Рис.17 Заметим теперь, что в этих уравнениях многие из коэффициентов обращаются в нуль. Это будут все
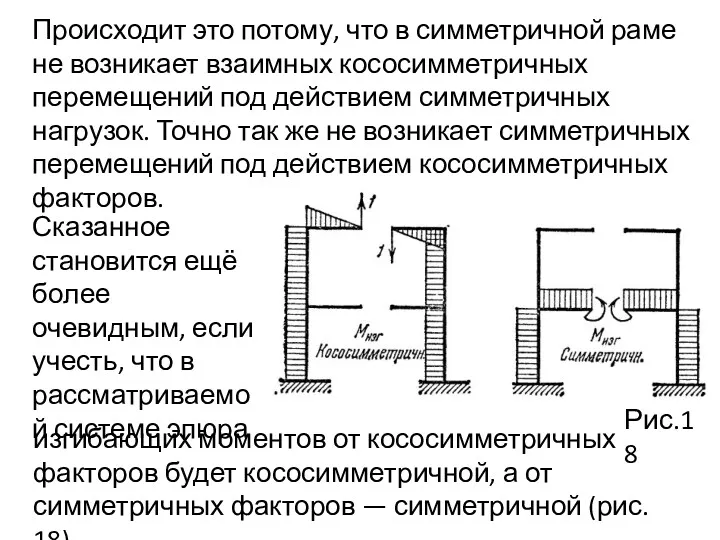
- 46. Происходит это потому, что в симметричной раме не возникает взаимных кососимметричных перемещений под действием симметричных нагрузок.
- 47. При перемножении таких эпюр, естественно, получим нуль, в то время как перемножение кососимметричной эпюры на кососимметричную
- 49. Скачать презентацию
Кинематический анализ плоских стержневых систем. Статически неопределимые рамы и балки.
Ранее в
Кинематический анализ плоских стержневых систем. Статически неопределимые рамы и балки.
Ранее в
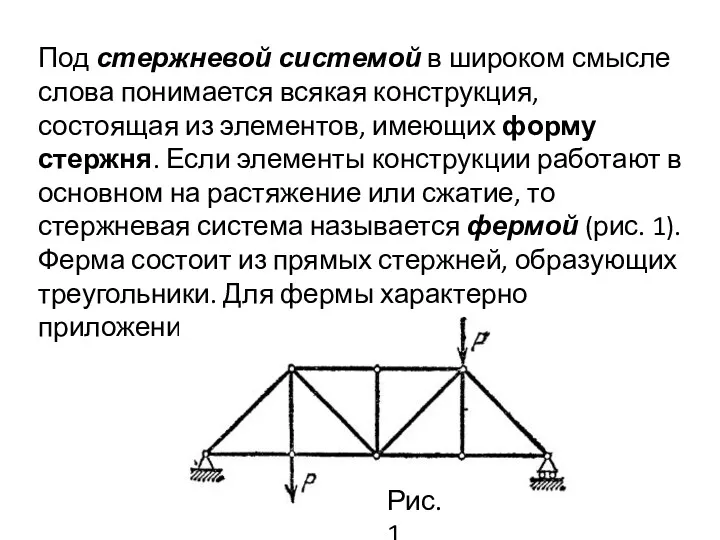
Под стержневой системой в широком смысле слова понимается всякая конструкция, состоящая
Под стержневой системой в широком смысле слова понимается всякая конструкция, состоящая
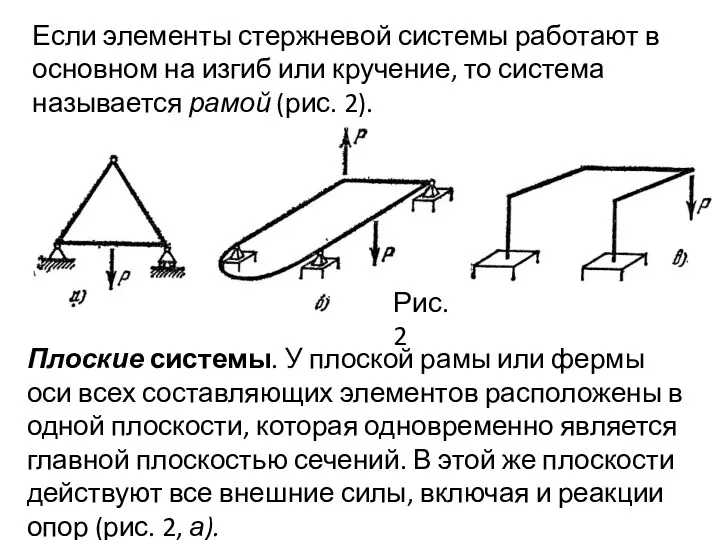
Если элементы стержневой системы работают в основном на изгиб или кручение,
Если элементы стержневой системы работают в основном на изгиб или кручение,
Плоскопространственные системы. Для такого рода систем оси составляющих элементов в недеформированном
Плоскопространственные системы. Для такого рода систем оси составляющих элементов в недеформированном
Рамы и фермы принято разделять на статически определимые и статически неопределимые.
Рамы и фермы принято разделять на статически определимые и статически неопределимые.
Разность между числом неизвестных (реакций опор и внутренних силовых факторов) и
Разность между числом неизвестных (реакций опор и внутренних силовых факторов) и
Положение жесткого тела в пространстве определяется шестью независимыми координатами, иначе говоря,
Положение жесткого тела в пространстве определяется шестью независимыми координатами, иначе говоря,
Следовательно, если на свободный жесткий стержень наложено шесть связей, то положение
Следовательно, если на свободный жесткий стержень наложено шесть связей, то положение
Связи в рамах и стержневых системах делят обычно на связи внешние
Связи в рамах и стержневых системах делят обычно на связи внешние
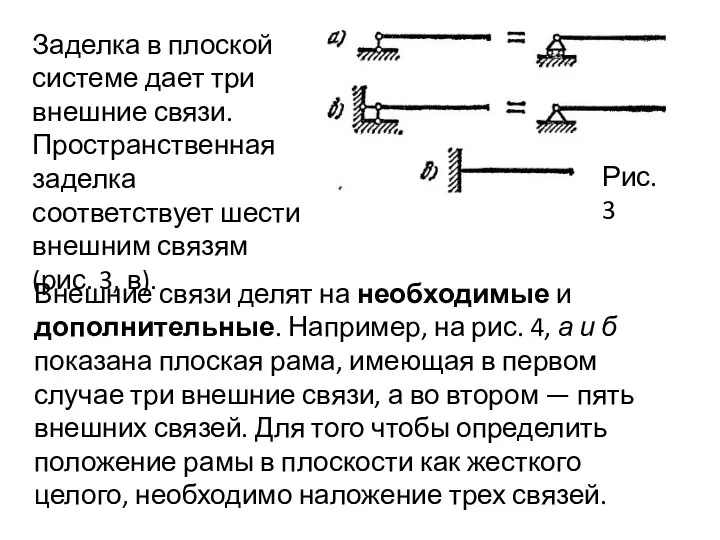
Рис.3
Заделка в плоской системе дает три внешние связи. Пространственная заделка соответствует
Рис.3
Заделка в плоской системе дает три внешние связи. Пространственная заделка соответствует
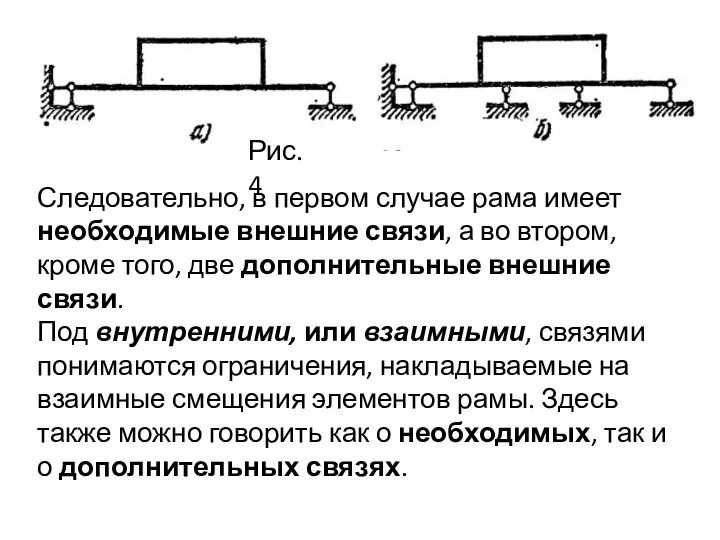
Рис.4
Следовательно, в первом случае рама имеет необходимые внешние связи, а во
Рис.4
Следовательно, в первом случае рама имеет необходимые внешние связи, а во
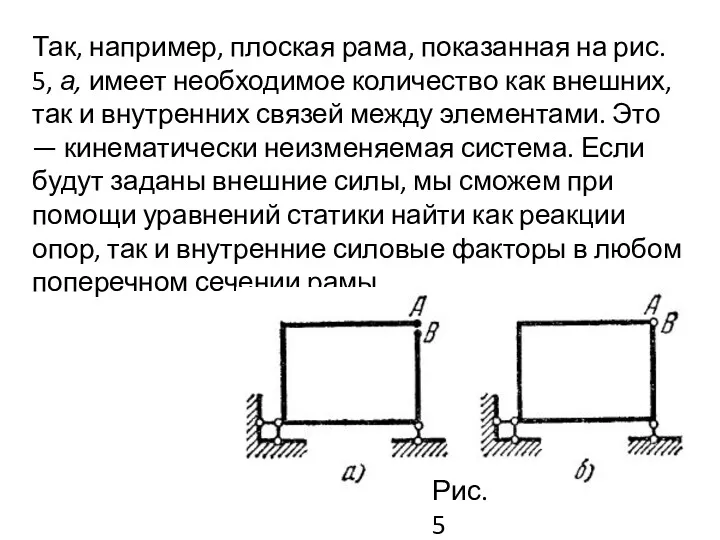
Так, например, плоская рама, показанная на рис. 5, а, имеет необходимое
Так, например, плоская рама, показанная на рис. 5, а, имеет необходимое

В той же раме, показанной на рис. 5б, кроме внешних наложены
В той же раме, показанной на рис. 5б, кроме внешних наложены
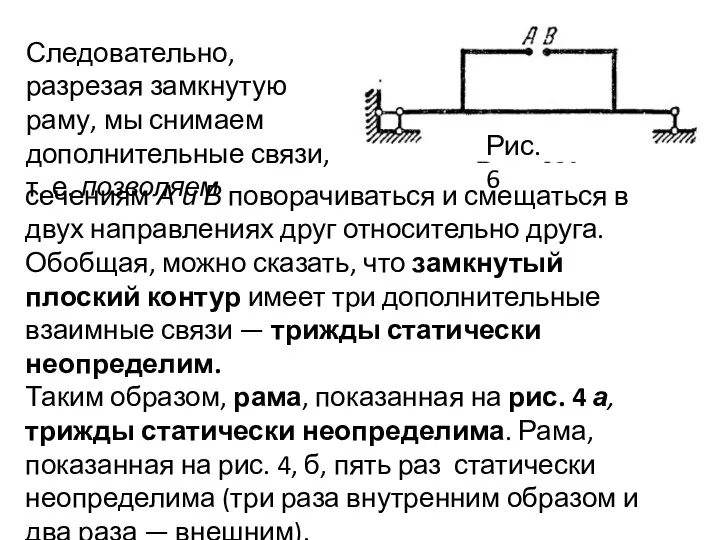
Рис.6
Следовательно, разрезая замкнутую раму, мы снимаем дополнительные связи, т. е. позволяем
сечениям
Рис.6
Следовательно, разрезая замкнутую раму, мы снимаем дополнительные связи, т. е. позволяем
сечениям

Рассмотрим несколько примеров определения степени статической неопределимости стержневых и рамных систем.
Рассмотрим несколько примеров определения степени статической неопределимости стержневых и рамных систем.
а.) Рама имеет четыре дополнительные внешние связи и три внутренние связи,
а.) Рама имеет четыре дополнительные внешние связи и три внутренние связи,
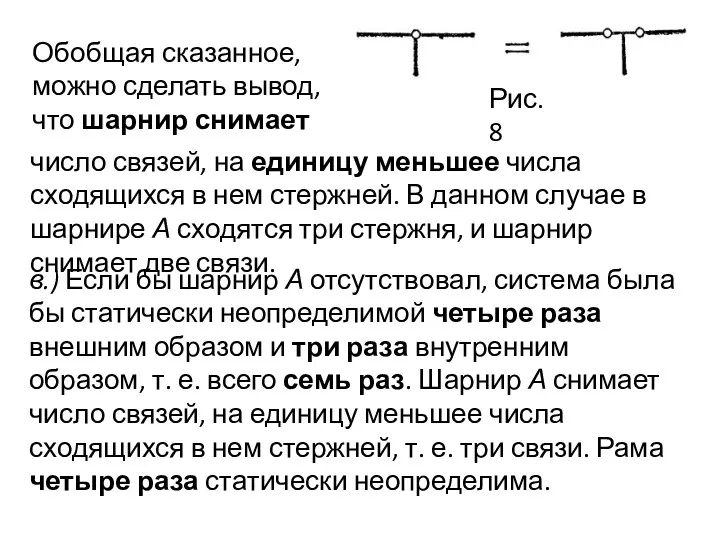
Рис.8
Обобщая сказанное, можно сделать вывод, что шарнир снимает
число связей, на единицу
Рис.8
Обобщая сказанное, можно сделать вывод, что шарнир снимает
число связей, на единицу
г.) Рама три раза статически неопределима.
д.) Внешние связи не удовлетворяют условиям
г.) Рама три раза статически неопределима.
д.) Внешние связи не удовлетворяют условиям
е.) Рама — пространственная. Имеется шесть дополнительных внешних связей (лишняя заделка)
е.) Рама — пространственная. Имеется шесть дополнительных внешних связей (лишняя заделка)
и.) Здесь также рассматриваются только внутренние связи, поскольку система внешних сил
и.) Здесь также рассматриваются только внутренние связи, поскольку система внешних сил
Метод сил. Уравнения метода сил
Выбор основной системы
Наиболее применяемым методом раскрытия статической
Метод сил. Уравнения метода сил
Выбор основной системы
Наиболее применяемым методом раскрытия статической
Такой прием не является единственно возможным. В строительной механике широко применяются
Такой прием не является единственно возможным. В строительной механике широко применяются
Например, для рамы, показанной на рис.9, можно предложить основные системы, а,
Например, для рамы, показанной на рис.9, можно предложить основные системы, а,

Вместе с тем нужно помнить, что не всякая система с семью
Вместе с тем нужно помнить, что не всякая система с семью
На рис.11 показано пять возможных способов приложения неизвестных сил, соответствующих приведенным
На рис.11 показано пять возможных способов приложения неизвестных сил, соответствующих приведенным
Канонические уравнения метода сил
Обратимся к конкретному примеру. Рассмотрим, например, систему, представленную
Канонические уравнения метода сил
Обратимся к конкретному примеру. Рассмотрим, например, систему, представленную
Аналогично можно записать:
и т.д.
Аналогично можно записать:
и т.д.


Теперь уравнения примут вид
(2)
Эти уравнения носят название канонических уравнений метода сил.
Теперь уравнения примут вид
(2)
Эти уравнения носят название канонических уравнений метода сил.

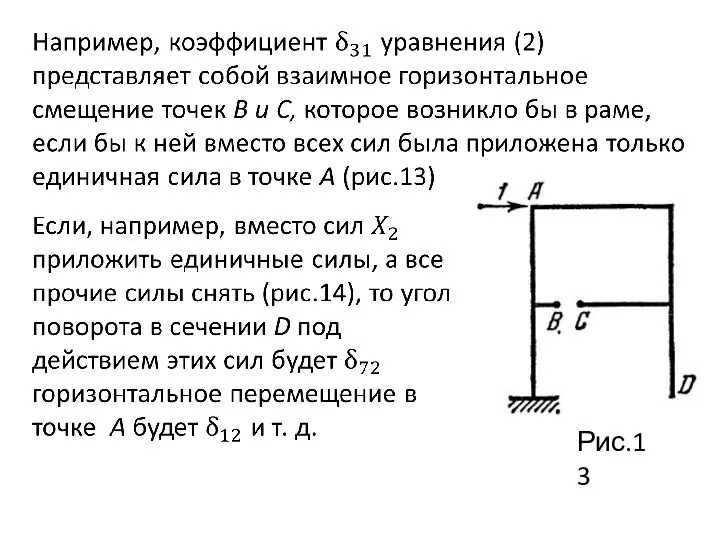
Рис.13
Рис.13
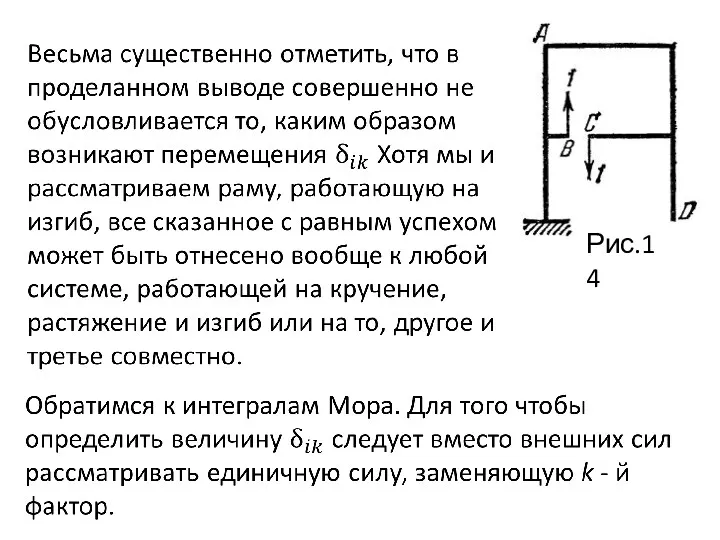
Рис.14
Рис.14
В итоге получим
(3)
В итоге получим
(3)


Использование свойств симметрии и косой симметрии при раскрытии статической неопределимости
Пусть имеется
Использование свойств симметрии и косой симметрии при раскрытии статической неопределимости
Пусть имеется
Рассмотрим случаи нагружения рамы симметричной и кососимметричной нагрузками. Под симметричной нагрузкой
Рассмотрим случаи нагружения рамы симметричной и кососимметричной нагрузками. Под симметричной нагрузкой

Аналогично классифицируем и внутренние силовые факторы. Рассмотрим для этого некоторое произвольное
Аналогично классифицируем и внутренние силовые факторы. Рассмотрим для этого некоторое произвольное
Такими оказываются три: два изгибающих момента и нормальная сила. Будем их
Такими оказываются три: два изгибающих момента и нормальная сила. Будем их
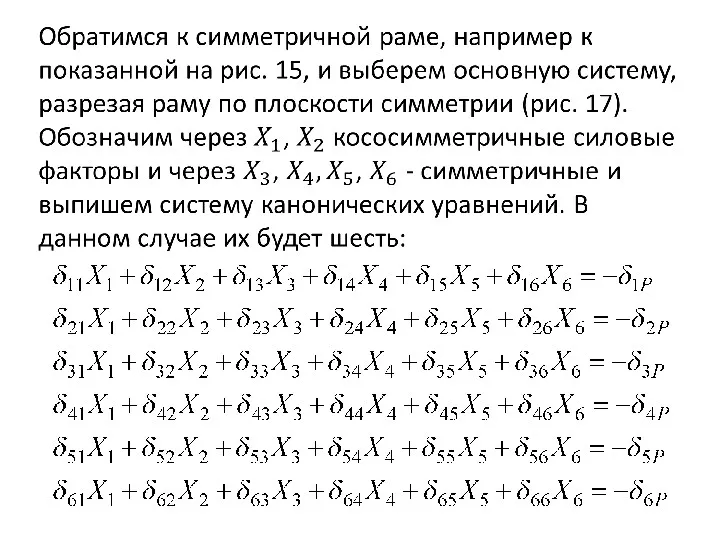
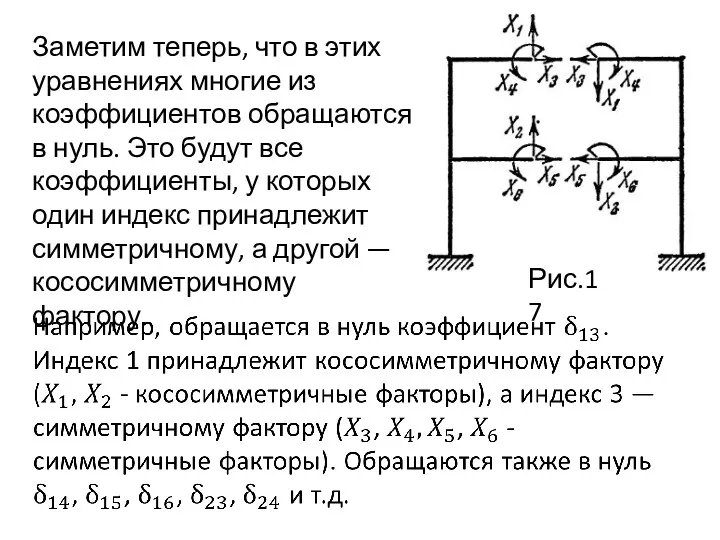
Рис.17
Заметим теперь, что в этих уравнениях многие из коэффициентов обращаются в
Рис.17
Заметим теперь, что в этих уравнениях многие из коэффициентов обращаются в
Происходит это потому, что в симметричной раме не возникает взаимных кососимметричных
Происходит это потому, что в симметричной раме не возникает взаимных кососимметричных
При перемножении таких эпюр, естественно, получим нуль, в то время как
При перемножении таких эпюр, естественно, получим нуль, в то время как
 Давление. Единицы давления. Способы уменьшения и увеличения давления
Давление. Единицы давления. Способы уменьшения и увеличения давления Двигатели внутреннего сгорания
Двигатели внутреннего сгорания Фізичні характеристики Сонця
Фізичні характеристики Сонця Способ установки фаркопа для легковых автомобилей категории М1 и его сертификация
Способ установки фаркопа для легковых автомобилей категории М1 и его сертификация Импульс, закон сохранения импульса
Импульс, закон сохранения импульса ИК-спектроскопия
ИК-спектроскопия Электромагнитное излучение. Свойства излучения Электромагнитное излучение, исследуемое в астрофизике
Электромагнитное излучение. Свойства излучения Электромагнитное излучение, исследуемое в астрофизике Механика твердого тела. (Лекция 4)
Механика твердого тела. (Лекция 4) Физические основы воздействия на атмосферные процессы. Реагенты
Физические основы воздействия на атмосферные процессы. Реагенты Цель и задачи курса Техническая механика. Расчеты на прочность. Расчеты на жесткость
Цель и задачи курса Техническая механика. Расчеты на прочность. Расчеты на жесткость Электронная презентация Изопроцессы в идеальном газе
Электронная презентация Изопроцессы в идеальном газе Теплотехника. Термодинамика открытых систем
Теплотехника. Термодинамика открытых систем Электрический ток в металлах. Электролитическая диссоциация. Электролиз
Электрический ток в металлах. Электролитическая диссоциация. Электролиз Энергия. Работа. Мощность
Энергия. Работа. Мощность NW Rapid Site Installation
NW Rapid Site Installation Простые механизмы
Простые механизмы Гетерогенный химический процесс система газ твердое
Гетерогенный химический процесс система газ твердое Стоячие волны
Стоячие волны Конспект урока по физике в 7 классе Сообщающиеся сосуды
Конспект урока по физике в 7 классе Сообщающиеся сосуды Сила трения
Сила трения Механизмы переноса тепла: теплопроводность, конвекция, излучение
Механизмы переноса тепла: теплопроводность, конвекция, излучение Сила трения. Особенности сил трения
Сила трения. Особенности сил трения Закон сохранения энергии, 7 класс
Закон сохранения энергии, 7 класс Огляд конструкцій плугів спец. призначення. Огляд конструкцій фрезерних машин, ямокопачів, площадкоутворювачів. Лекція 4 (ч. 2)
Огляд конструкцій плугів спец. призначення. Огляд конструкцій фрезерних машин, ямокопачів, площадкоутворювачів. Лекція 4 (ч. 2) Ремонт и сборка зубчатых передач
Ремонт и сборка зубчатых передач Система единиц СИ. Векторные и скалярные величины
Система единиц СИ. Векторные и скалярные величины Основні закономірності термодинаміки. Термостатика та термодинаміка. Лекція 1
Основні закономірності термодинаміки. Термостатика та термодинаміка. Лекція 1 Ректификация үдерісі
Ректификация үдерісі