- Строительная механика. Кинематический анализ сооружений. Часть I

Содержание
- 2. К и н е м а т и ч е с к и й а н
- 3. Основные понятия кинематического анализа Д и с к – часть системы (один или несколько соединённых друг
- 4. Д и с к и – а, б, в, г, д – диски из одного элемента
- 5. Классификация связей – по области расположения дискретные (в отдельных точках или сечениях) континуальные (распределённые по объему,
- 6. Типы связей плоских систем
- 7. Типы связей плоских систем (окончание)
- 8. Степени свободы
- 9. Системы геометрически неизменяемые, изменяемые и мгновенно изменяемые Геометрически неизменяемая система (ГНС) – это система, перемещения в
- 10. Алгоритм кинематического анализа
- 11. Этапы кинематического анализа 1) количественный анализ; 2) качественный (структурный) анализ. К о л и ч е
- 12. К о л и ч е с т в е н н ы й а н
- 13. Качественный (структурный) анализ – это исследование структуры расчётной схемы сооружения, заключающееся в проверке правильности расположения связей,
- 14. Классификация связей по кинематическому признаку Н е о б х о д и м ы е
- 15. Типовые способы геометрически неизменяемого соединения дисков плоских систем
- 16. Дополнительные сведения, вытекающие из структурного анализа Практическая рекомендация по последовательности расчёта статически определимой составной системы: для
- 17. Пример выполнения кинематического анализа плоской стержневой системы A B d e c f h k p
- 18. Этап 1. Количественный анализ – D1 D5 D3 D4 D2 D7 D6 A B c e
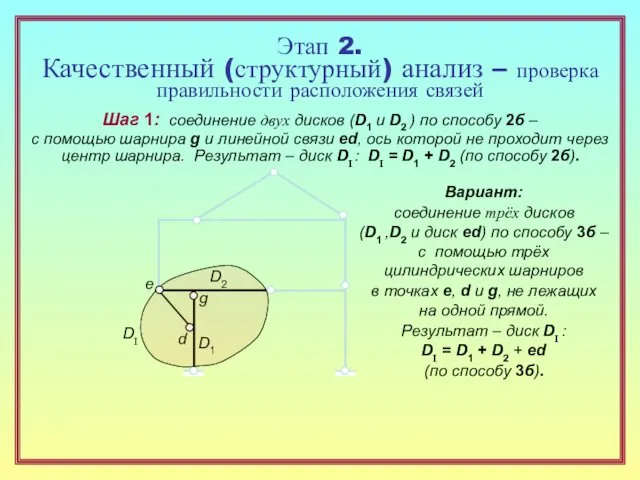
- 19. Этап 2. Качественный (структурный) анализ – проверка правильности расположения связей D1 D2 g d e DI
- 20. Этап 2. Качественный (структурный) анализ – проверка правильности расположения связей D1 D2 g d e DI
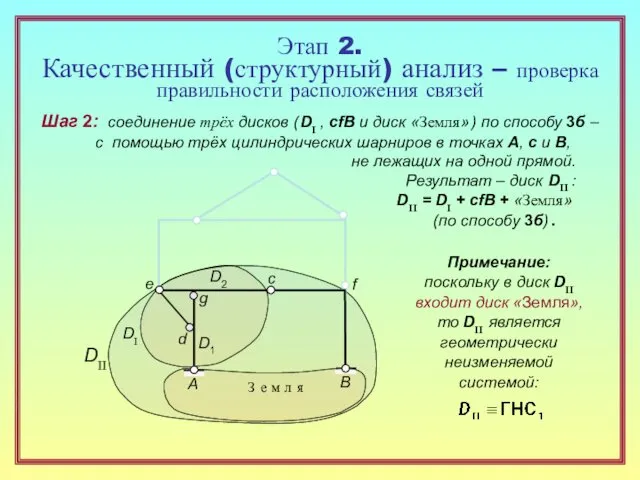
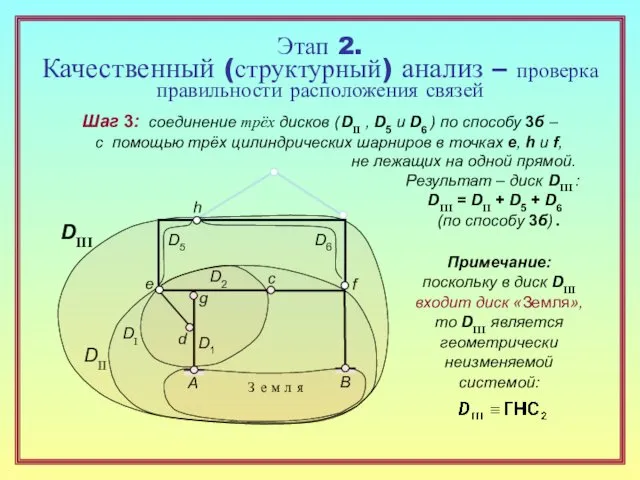
- 21. Этап 2. Качественный (структурный) анализ – проверка правильности расположения связей D1 D2 g d e DI
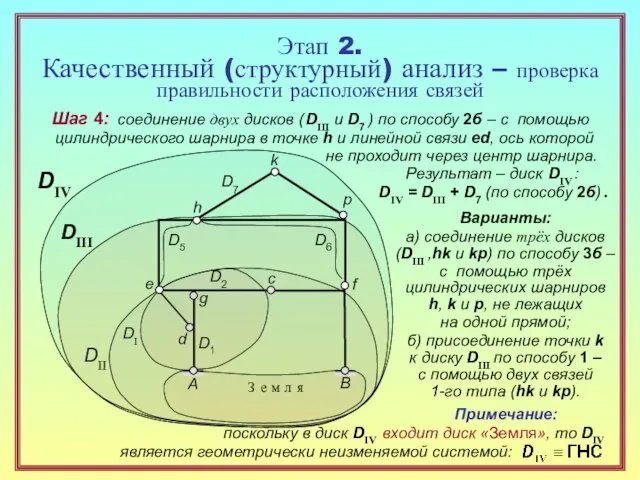
- 22. Этап 2. Качественный (структурный) анализ – проверка правильности расположения связей D1 D2 g d e DI
- 23. Р е з ю м е : A B d e c f h k p
- 24. Дополнительные сведения, вытекающие из структурного анализа A B d e c f h k p Практическая
- 25. Системы, для которых качественный (структурный) анализ расчётной схемы может быть полностью выполнен с использованием только типовых
- 26. Пример кинематического анализа системы со сложной структурой Этап 1. Количественный анализ D1 D5 D4 D2 D3
- 27. Пример кинематического анализа системы со сложной структурой Этап 2. Качественный (структурный) анализ А В Выполнить синтез
- 28. Пример кинематического анализа системы со сложной структурой А В Определяется перемещение δS по направлению удалённой связи
- 29. К о н т р о л ь н ы е в о п р о
- 31. Скачать презентацию
К и н е м а т и ч е с
К и н е м а т и ч е с
Основные понятия кинематического анализа
Д и с к –
часть системы
Основные понятия кинематического анализа
Д и с к –
часть системы

Д и с к и
– а, б, в, г, д –
Д и с к и
– а, б, в, г, д –
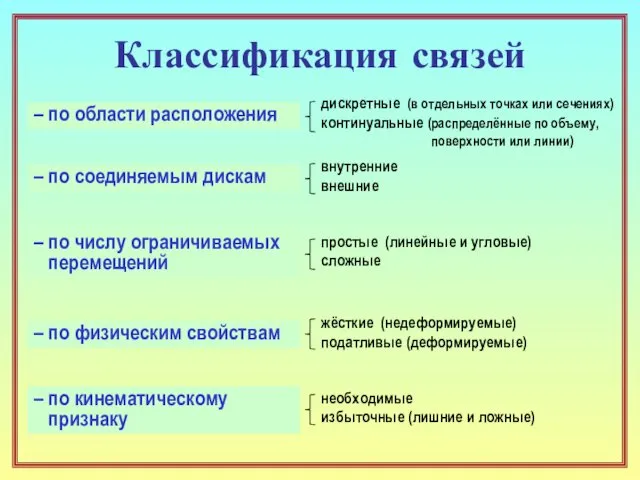
Классификация связей
– по области расположения
дискретные (в отдельных точках или сечениях)
континуальные (распределённые
Классификация связей
– по области расположения
дискретные (в отдельных точках или сечениях)
континуальные (распределённые
Типы связей плоских систем
Типы связей плоских систем
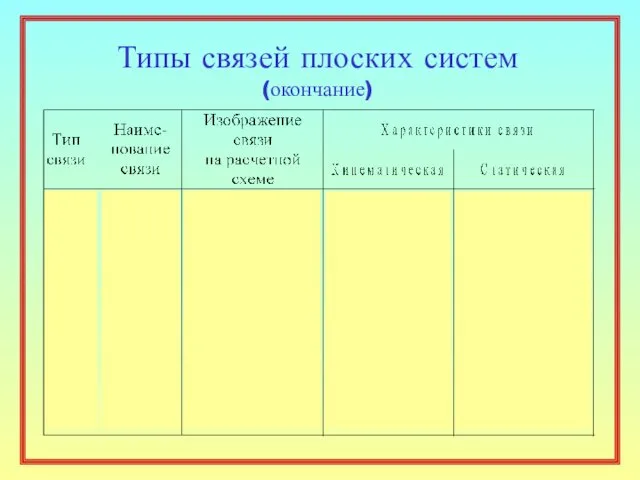
Типы связей плоских систем
(окончание)
Типы связей плоских систем
(окончание)
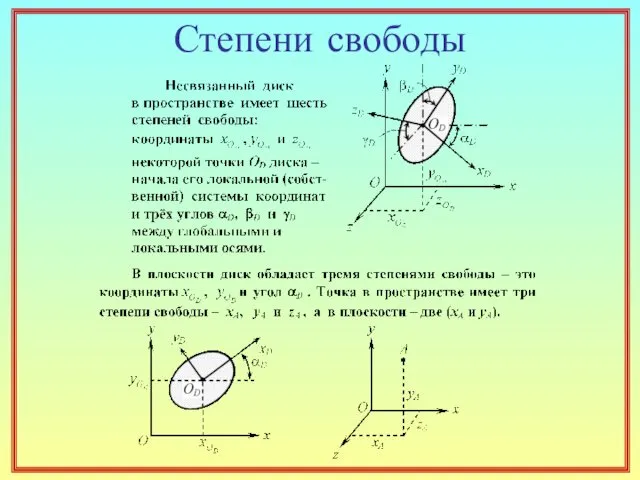
Степени свободы
Степени свободы
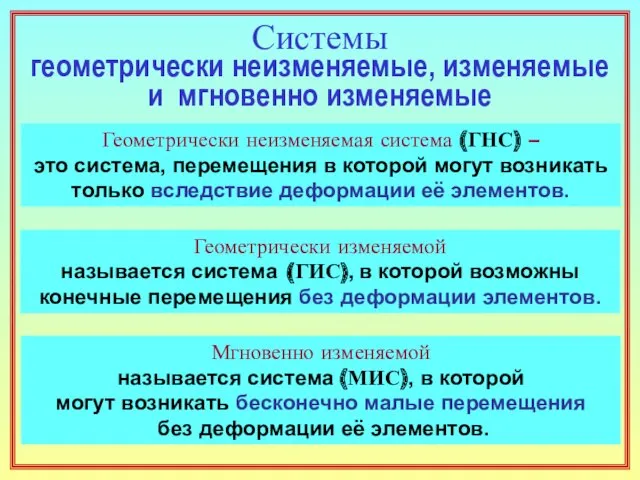
Системы
геометрически неизменяемые, изменяемые
и мгновенно изменяемые
Геометрически неизменяемая система (ГНС) –
Системы
геометрически неизменяемые, изменяемые
и мгновенно изменяемые
Геометрически неизменяемая система (ГНС) –
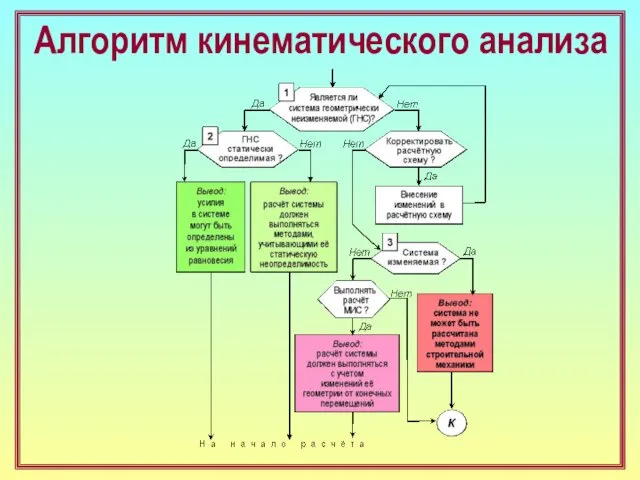
Алгоритм кинематического анализа
Алгоритм кинематического анализа
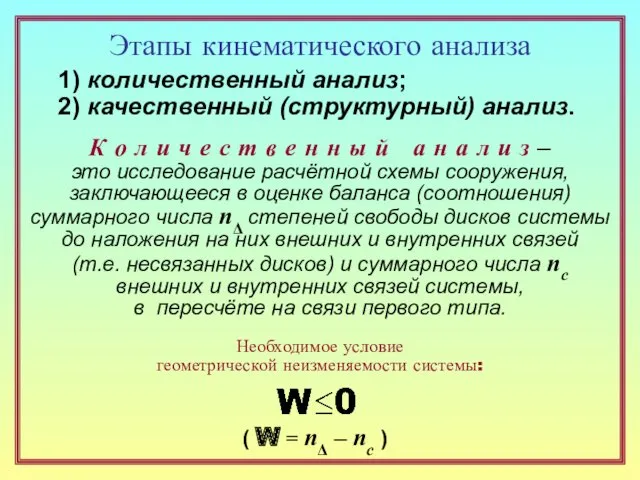
Этапы кинематического анализа
1) количественный анализ;
2) качественный (структурный) анализ.
К о
Этапы кинематического анализа
1) количественный анализ;
2) качественный (структурный) анализ.
К о
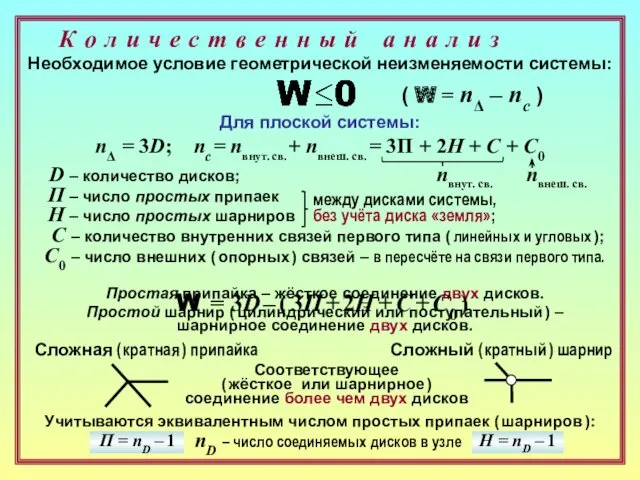
К о л и ч е с т в е н
К о л и ч е с т в е н
Качественный (структурный) анализ –
это исследование структуры
расчётной схемы сооружения, заключающееся
Качественный (структурный) анализ –
это исследование структуры
расчётной схемы сооружения, заключающееся
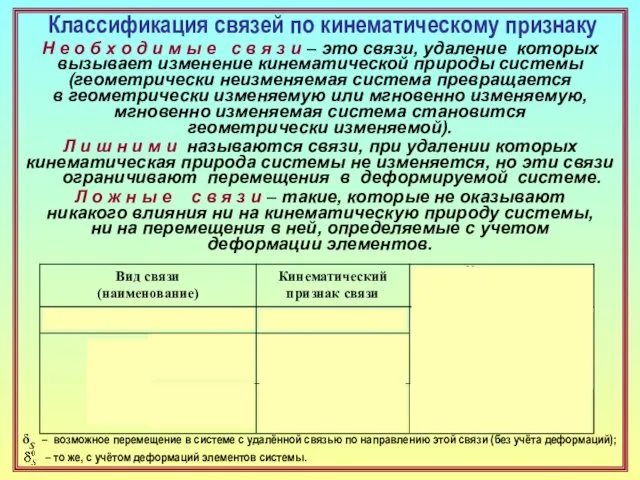
Классификация связей по кинематическому признаку
Н е о б х о
Классификация связей по кинематическому признаку
Н е о б х о
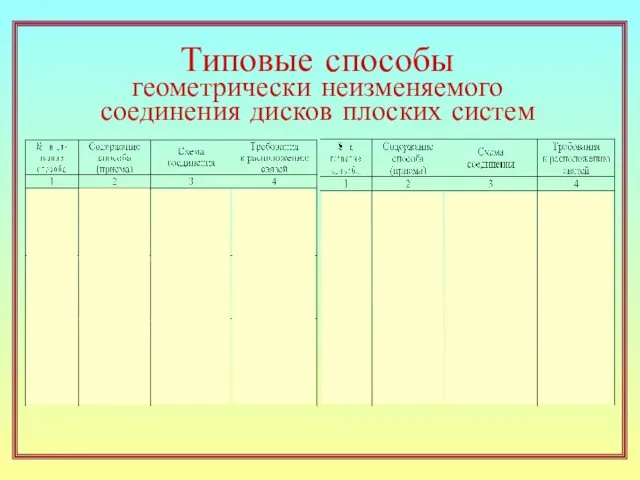
Типовые способы
геометрически неизменяемого
соединения дисков плоских систем
Типовые способы
геометрически неизменяемого
соединения дисков плоских систем
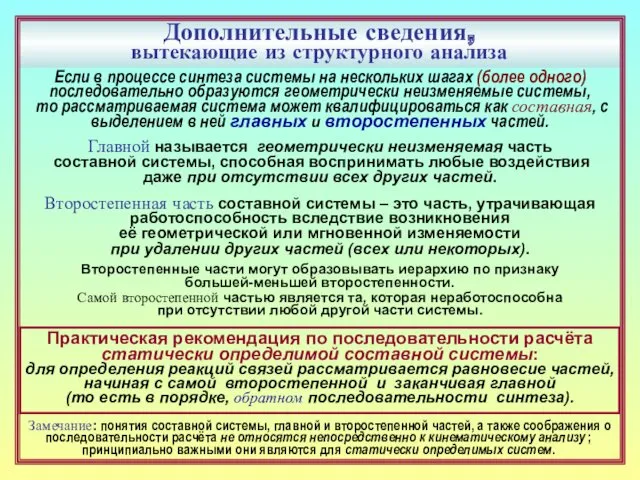
Дополнительные сведения,
вытекающие из структурного анализа
Практическая рекомендация по последовательности расчёта
статически определимой
Дополнительные сведения,
вытекающие из структурного анализа
Практическая рекомендация по последовательности расчёта
статически определимой
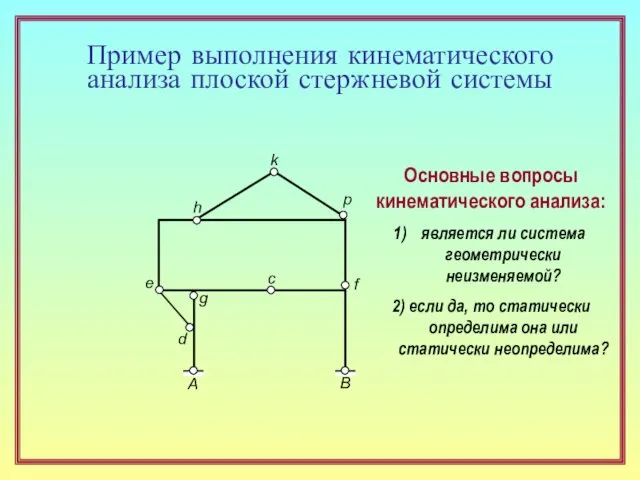
Пример выполнения кинематического анализа плоской стержневой системы
A
B
d
e
c
f
h
k
p
Основные вопросы
кинематического анализа:
является ли система
Пример выполнения кинематического анализа плоской стержневой системы
A
B
d
e
c
f
h
k
p
Основные вопросы
кинематического анализа:
является ли система
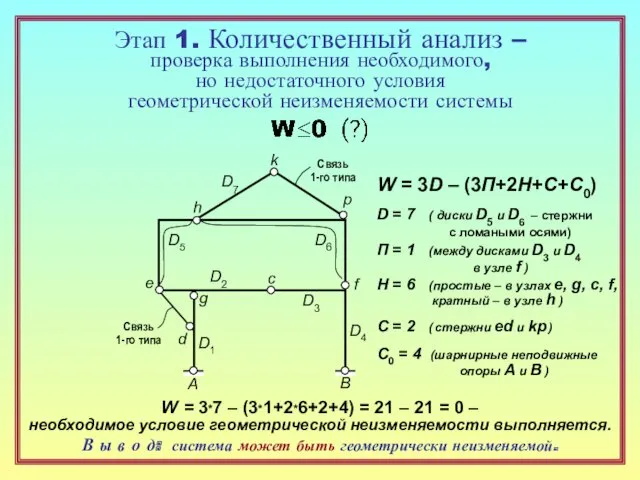
Этап 1. Количественный анализ –
D1
D5
D3
D4
D2
D7
D6
A
B
c
e
d
g
f
k
h
W = 3D – (3П+2Н+С+С0)
D = 7
Этап 1. Количественный анализ –
D1
D5
D3
D4
D2
D7
D6
A
B
c
e
d
g
f
k
h
W = 3D – (3П+2Н+С+С0)
D = 7
Этап 2.
Качественный (структурный) анализ – проверка правильности расположения связей
D1
D2
g
d
e
DI
Шаг 1:
Этап 2.
Качественный (структурный) анализ – проверка правильности расположения связей
D1
D2
g
d
e
DI
Шаг 1:
Этап 2.
Качественный (структурный) анализ – проверка правильности расположения связей
D1
D2
g
d
e
DI
Шаг 2:
Этап 2.
Качественный (структурный) анализ – проверка правильности расположения связей
D1
D2
g
d
e
DI
Шаг 2:
Этап 2.
Качественный (структурный) анализ – проверка правильности расположения связей
D1
D2
g
d
e
DI
Шаг 3:
Этап 2.
Качественный (структурный) анализ – проверка правильности расположения связей
D1
D2
g
d
e
DI
Шаг 3:
Этап 2.
Качественный (структурный) анализ – проверка правильности расположения связей
D1
D2
g
d
e
DI
Шаг 4:
Этап 2.
Качественный (структурный) анализ – проверка правильности расположения связей
D1
D2
g
d
e
DI
Шаг 4:
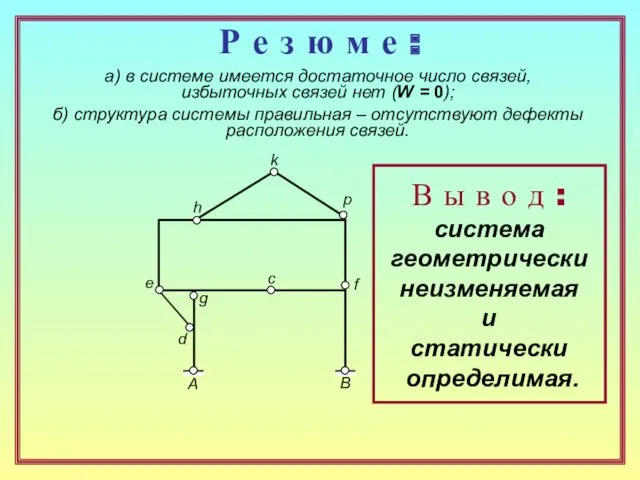
Р е з ю м е :
A
B
d
e
c
f
h
k
p
В ы в о
Р е з ю м е :
A
B
d
e
c
f
h
k
p
В ы в о
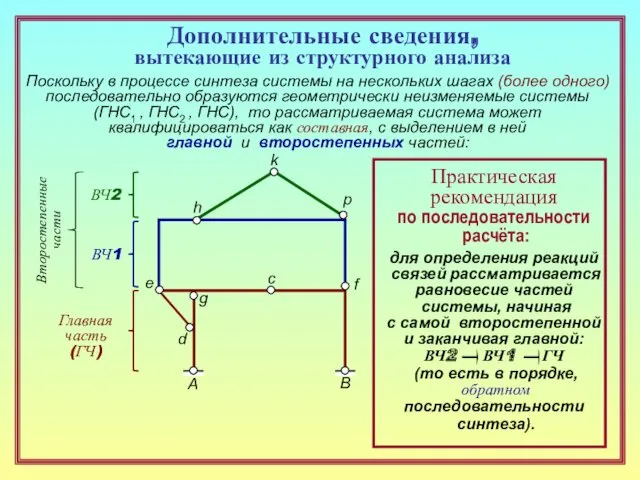
Дополнительные сведения,
вытекающие из структурного анализа
A
B
d
e
c
f
h
k
p
Практическая
рекомендация
по последовательности
расчёта:
для определения реакций
связей
Дополнительные сведения,
вытекающие из структурного анализа
A
B
d
e
c
f
h
k
p
Практическая
рекомендация
по последовательности
расчёта:
для определения реакций
связей
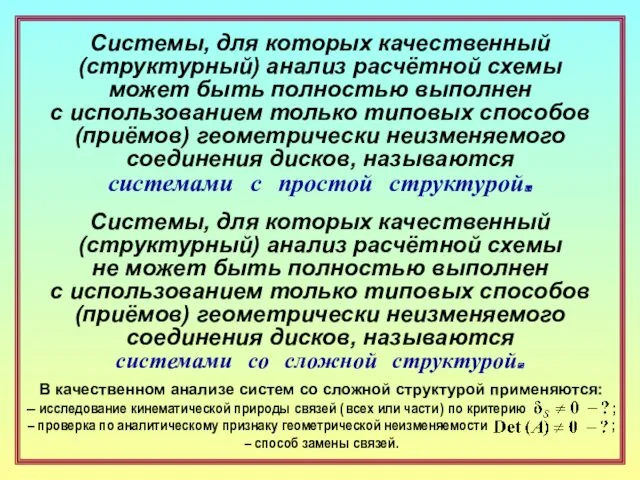
Системы, для которых качественный
(структурный) анализ расчётной схемы
может быть полностью выполнен
Системы, для которых качественный
(структурный) анализ расчётной схемы
может быть полностью выполнен
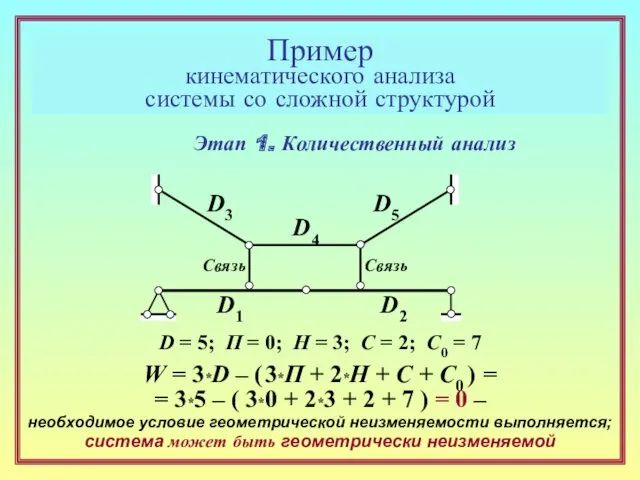
Пример
кинематического анализа
системы со сложной структурой
Этап 1. Количественный анализ
D1
D5
D4
D2
D3
Связь
Связь
D = 5; П
Пример
кинематического анализа
системы со сложной структурой
Этап 1. Количественный анализ
D1
D5
D4
D2
D3
Связь
Связь
D = 5; П

Пример
кинематического анализа
системы со сложной структурой
Этап 2. Качественный (структурный) анализ
А
В
Выполнить синтез системы
Пример
кинематического анализа
системы со сложной структурой
Этап 2. Качественный (структурный) анализ
А
В
Выполнить синтез системы

Пример
кинематического анализа
системы со сложной структурой
А
В
Определяется перемещение δS по направлению удалённой связи
Пример
кинематического анализа
системы со сложной структурой
А
В
Определяется перемещение δS по направлению удалённой связи
К о н т р о л ь н ы е
К о н т р о л ь н ы е
 Подготовка к ЕГЭ по физике
Подготовка к ЕГЭ по физике Техническая термодинамика. Термодинамичекие потенциалы, эффект Джоуля-Томсона
Техническая термодинамика. Термодинамичекие потенциалы, эффект Джоуля-Томсона Электризация тел. Электрический заряд. Электроскоп
Электризация тел. Электрический заряд. Электроскоп Электромагнитное поле. Электромагнитные волны
Электромагнитное поле. Электромагнитные волны Способ установки фаркопа для легковых автомобилей категории М1 и его сертификация
Способ установки фаркопа для легковых автомобилей категории М1 и его сертификация Строение атома
Строение атома Передачи зубчатые
Передачи зубчатые Свет в нашей жизни
Свет в нашей жизни Наземное лазерное сканирование
Наземное лазерное сканирование Плотность вещества
Плотность вещества Resistances termometrs
Resistances termometrs Выбор оборудования для участка подготовки, кузовного ремонта и покраски легковых автомобилей
Выбор оборудования для участка подготовки, кузовного ремонта и покраски легковых автомобилей Гетерогенные реакции в растворах электролитов
Гетерогенные реакции в растворах электролитов Образование гидридов
Образование гидридов Структурный анализ механизмов
Структурный анализ механизмов Влияние фазовых искажений на направленные свойства излучающей поверхности. Лекция № 11. АФУ
Влияние фазовых искажений на направленные свойства излучающей поверхности. Лекция № 11. АФУ Презентация к уроку Вес тела. 7 класс.
Презентация к уроку Вес тела. 7 класс.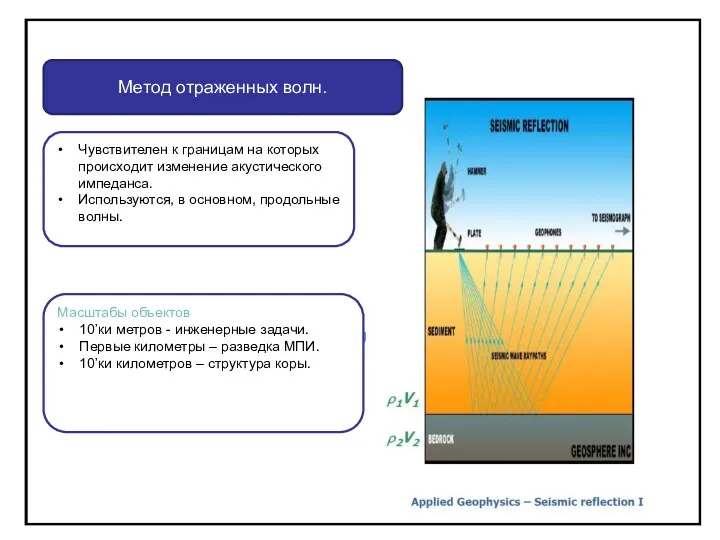 Выборка ОПВ. Прямая волна. Отраженные волны. Поверхностная волна
Выборка ОПВ. Прямая волна. Отраженные волны. Поверхностная волна Электромагнитные волны
Электромагнитные волны Правило Ленца. Явление самоиндукции. Энергия магнитного поля. (11 класс)
Правило Ленца. Явление самоиндукции. Энергия магнитного поля. (11 класс) _Линзы. Оптическая сила линзы_ (8 класс) (
_Линзы. Оптическая сила линзы_ (8 класс) ( источники света
источники света Принятые технологии, история и перспективы развития: реакторы с тяжелой водой и с водой под давлением. Лекция 7
Принятые технологии, история и перспективы развития: реакторы с тяжелой водой и с водой под давлением. Лекция 7 Дисперсия света
Дисперсия света Магнитооптические материалы. Магнитооптические эффекты
Магнитооптические материалы. Магнитооптические эффекты Электрические явления
Электрические явления Презентация Звуковые волны
Презентация Звуковые волны Изучение последовательного и параллельного соединения проводников
Изучение последовательного и параллельного соединения проводников