- Теоретическая механика. Кинематика. Курс лекций

Содержание
- 2. Содержание Лекция 1. Кинематика точки. Способы задания движения. Уравнения движения. Траектория. Закон движения точки. Связь между
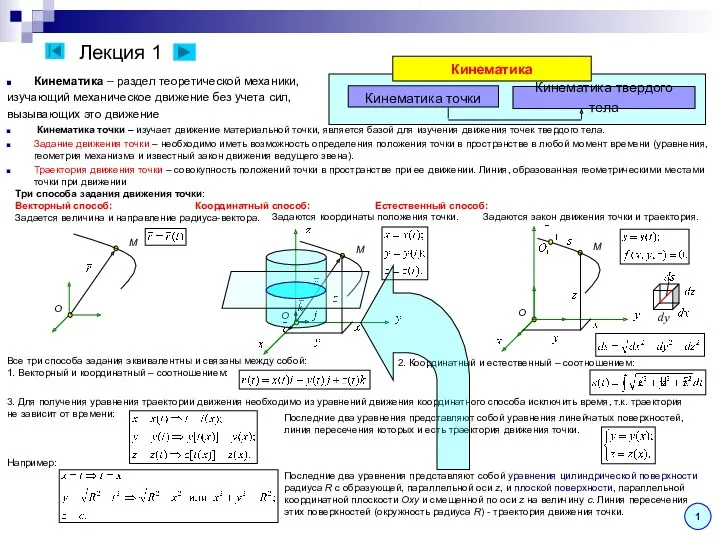
- 3. Лекция 1 Кинематика – раздел теоретической механики, изучающий механическое движение без учета сил, вызывающих это движение
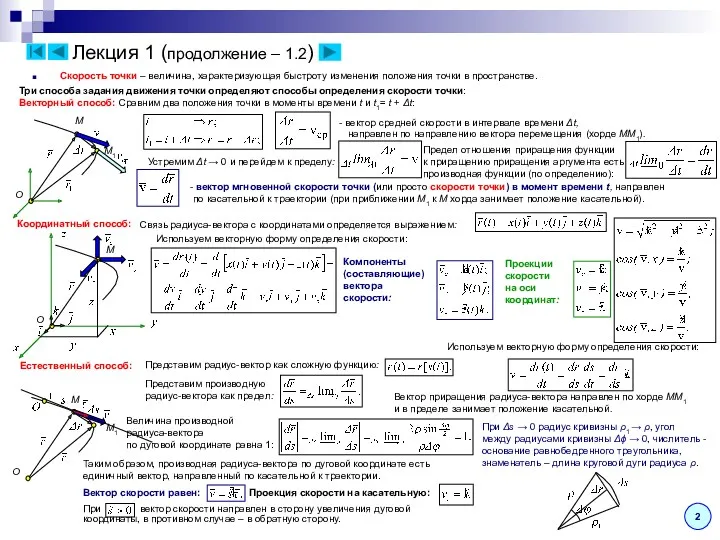
- 4. Лекция 1 (продолжение – 1.2) Скорость точки – величина, характеризующая быстроту изменения положения точки в пространстве.
- 5. Ускорение точки – величина, характеризующая быстроту изменения скорости точки. Три способа задания движения точки определяют способы
- 6. Естественный способ: Используем векторное выражение для ускорения и выражение для скорости при естественной способе задания: Величина
- 8. Скачать презентацию
Содержание
Лекция 1. Кинематика точки. Способы задания движения. Уравнения движения. Траектория. Закон
Содержание
Лекция 1. Кинематика точки. Способы задания движения. Уравнения движения. Траектория. Закон
Лекция 1
Кинематика – раздел теоретической механики,
изучающий механическое движение без учета сил,
Лекция 1
Кинематика – раздел теоретической механики,
изучающий механическое движение без учета сил,
Лекция 1 (продолжение – 1.2)
Скорость точки – величина, характеризующая быстроту изменения
Лекция 1 (продолжение – 1.2)
Скорость точки – величина, характеризующая быстроту изменения
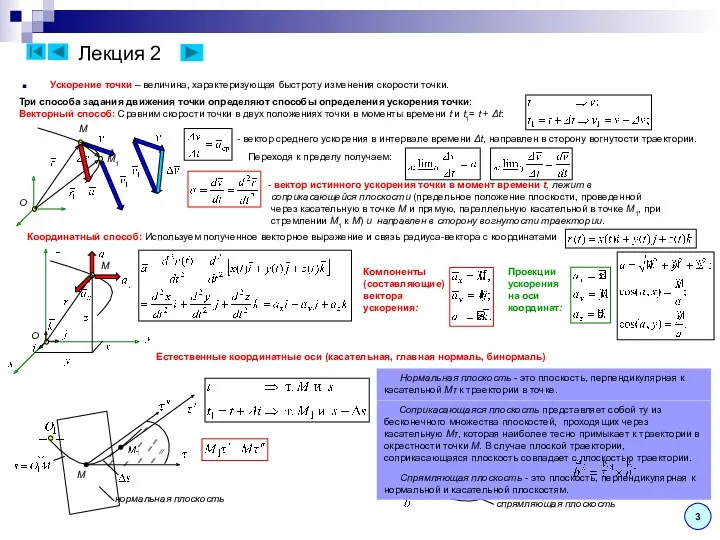
Ускорение точки – величина, характеризующая быстроту изменения скорости точки.
Три способа задания
Ускорение точки – величина, характеризующая быстроту изменения скорости точки.
Три способа задания
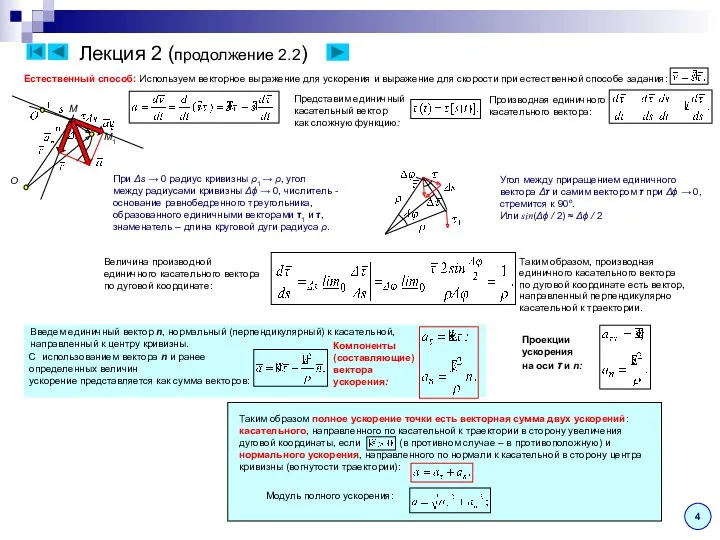
Естественный способ: Используем векторное выражение для ускорения и выражение для скорости
Естественный способ: Используем векторное выражение для ускорения и выражение для скорости
 Шкала электромагнитных волн.
Шкала электромагнитных волн. Термодинамические потенциалы. Общие условия равновесия
Термодинамические потенциалы. Общие условия равновесия Урок по теме Расчёт пути и времени движения 7 класс
Урок по теме Расчёт пути и времени движения 7 класс Дифракция механических волн
Дифракция механических волн Теплотехника. Основы технической термодинамики
Теплотехника. Основы технической термодинамики Расчет теплообменных аппаратов
Расчет теплообменных аппаратов Физическая картина мира
Физическая картина мира Сила Архимеда
Сила Архимеда Фотоэффект. Применение фотоэффекта в жизни
Фотоэффект. Применение фотоэффекта в жизни Лекция 2 2022 (1)
Лекция 2 2022 (1) Самокат в моей жизни
Самокат в моей жизни Системы питания и наддува ДВС. Тема 12
Системы питания и наддува ДВС. Тема 12 Урок физики Колебания, их виды и характеристики.
Урок физики Колебания, их виды и характеристики. Температура и термометры
Температура и термометры Решение задач а фотоэффект
Решение задач а фотоэффект Строение и физико-химические свойства поверхностных слоёв
Строение и физико-химические свойства поверхностных слоёв Переходные процессы в линейных электрических цепях
Переходные процессы в линейных электрических цепях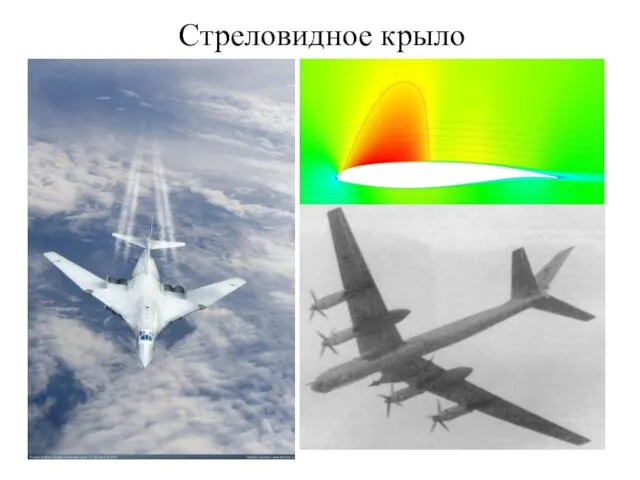 pr_Strelovidnoe_krylo
pr_Strelovidnoe_krylo Электротехника и электроника. Методы расчета сложных линейных цепей постоянного тока. (Лекция 2)
Электротехника и электроника. Методы расчета сложных линейных цепей постоянного тока. (Лекция 2) Буксовый узел электровоза ВЛ-11
Буксовый узел электровоза ВЛ-11 Конспект открытого урока по теме: Строение газообразных, жидких и твёрдых тел.
Конспект открытого урока по теме: Строение газообразных, жидких и твёрдых тел. Трактори та мінітрактори, які використовуються у лісовому господарстві. Лекція 1. Частина 3
Трактори та мінітрактори, які використовуються у лісовому господарстві. Лекція 1. Частина 3 Причины появления влаги в ОК
Причины появления влаги в ОК Електричні кола змінного струму
Електричні кола змінного струму Электрохимические методы. (Лекция 3)
Электрохимические методы. (Лекция 3) Физика – фундаментальная наука о природе. Научный метод познания и методы исследования физических явлений
Физика – фундаментальная наука о природе. Научный метод познания и методы исследования физических явлений Импульс. Законы изменения и сохранения импульса. Реактивное движение
Импульс. Законы изменения и сохранения импульса. Реактивное движение Лабораторная работа Наблюдение сплошного и линейчатых спектров. 11 класс
Лабораторная работа Наблюдение сплошного и линейчатых спектров. 11 класс