- Уравнения строительной механики. Вариационные принципы строительной механики

Содержание
- 2. РЕКОМЕНДУЕМАЯ УЧЕБНО-МЕТОДИЧЕСКАЯ ЛИТЕРАТУРА курса строительной механики У ч е б н и к и: 1. Погорелов
- 3. Строительная механика – наука, занимающаяся разработкой принципов и методов расчёта сооружений и конструкций, представляющих собой системы,
- 4. С точки зрения строительной механики под расчётом конструкции в целом или ее составляющих частей понимается определение
- 5. СТРОИТЕЛЬНАЯ механика Стержневых Пластин Комбинированных систем и оболочек систем Математика Детали машин И механизмов Конструкция самолета
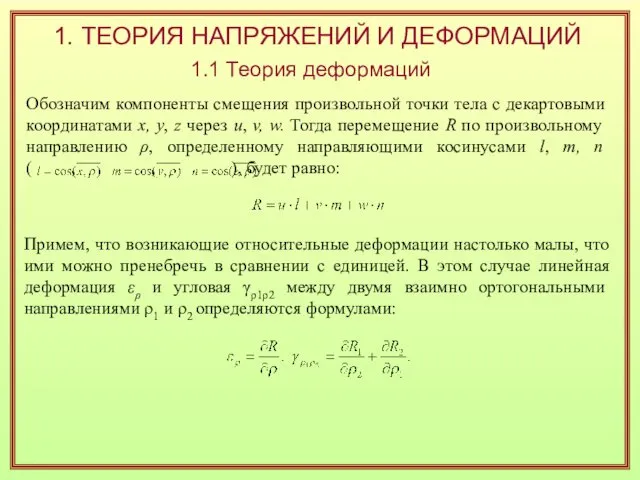
- 6. 1. ТЕОРИЯ НАПРЯЖЕНИЙ И ДЕФОРМАЦИЙ 1.1 Теория деформаций Обозначим компоненты смещения произвольной точки тела с декартовыми
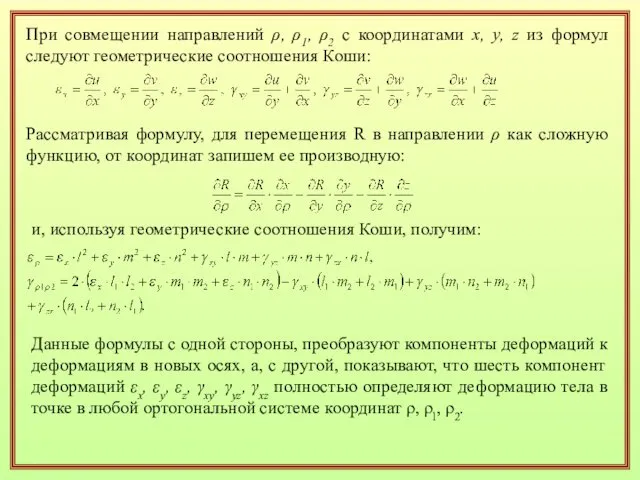
- 7. При совмещении направлений ρ, ρ1, ρ2 с координатами х, у, z из формул следуют геометрические соотношения
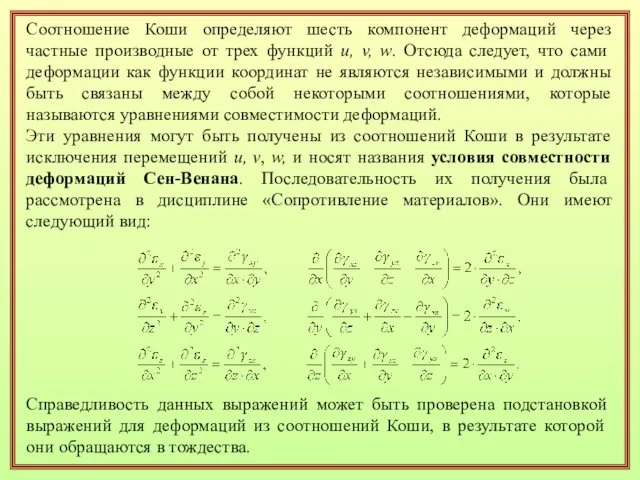
- 8. Соотношение Коши определяют шесть компонент деформаций через частные производные от трех функций u, v, w. Отсюда
- 9. 1.2 Теория напряжений Интенсивность усилий, возни-кающих на выделенной внутри тела произвольной площадке, представ-ляется в виде трех
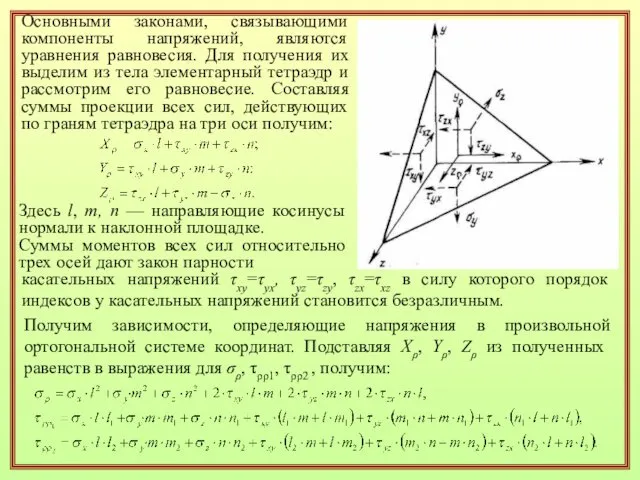
- 10. Основными законами, связывающими компоненты напряжений, являются уравнения равновесия. Для получения их выделим из тела элементарный тетраэдр
- 11. Полученные формулы показывают, что напряженное состояние в произвольной точке тела полностью определяется шестью компонентами напряжений (с
- 12. Рассмотрим равновесие некоторой произвольной части тела. Пусть объем этой части v и силы, действующие на каждую
- 13. Первые интегралы в этих равенствах берутся по полной поверхности рассматриваемой части тела и на основании теоремы
- 14. В скалярной форме формула имеет вид: где dV, dS – дифференциалы объема и поверхности соответственно, l,
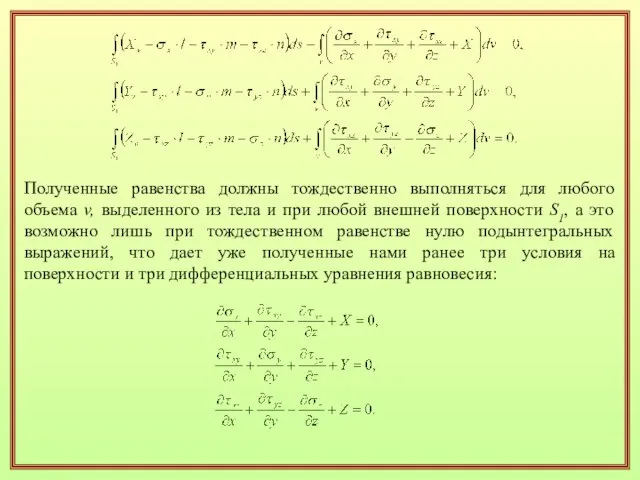
- 15. Полученные равенства должны тождественно выполняться для любого объема v, выделенного из тела и при любой внешней
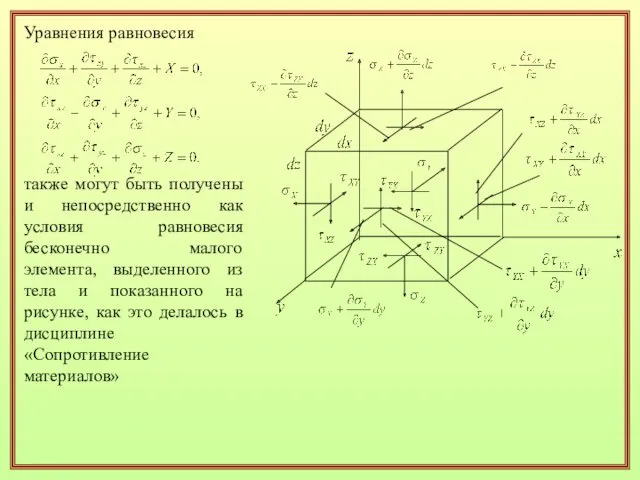
- 16. Уравнения равновесия также могут быть получены и непосредственно как условия равновесия бесконечно малого элемента, выделенного из
- 17. Физические соотношения Физические зависимости в линейной теории упругости для изотропного тела представлены уравнениями обобщенного закона Гука
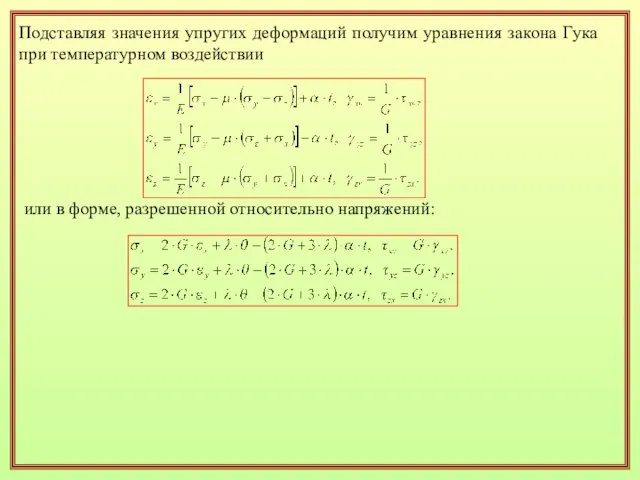
- 18. Подставляя значения упругих деформаций получим уравнения закона Гука при температурном воздействии или в форме, разрешенной относительно
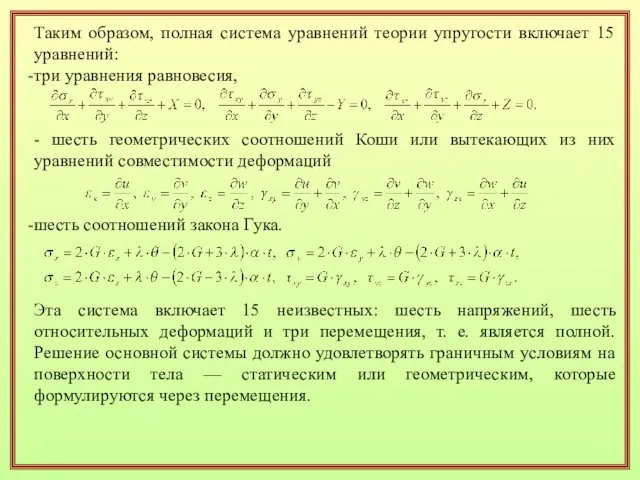
- 19. Таким образом, полная система уравнений теории упругости включает 15 уравнений: три уравнения равновесия, - шесть геометрических
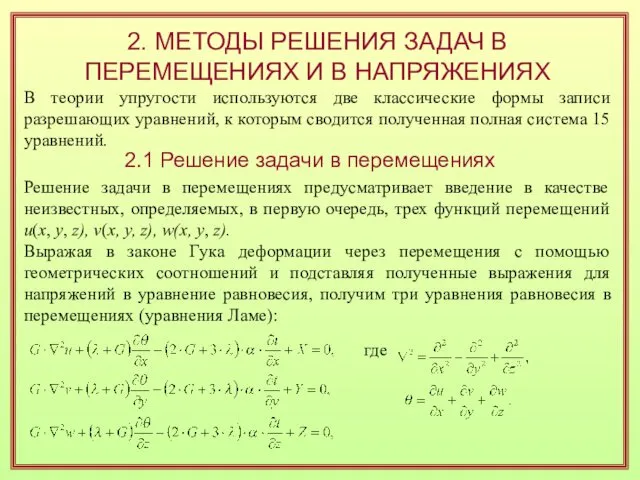
- 20. 2. МЕТОДЫ РЕШЕНИЯ ЗАДАЧ В ПЕРЕМЕЩЕНИЯХ И В НАПРЯЖЕНИЯХ В теории упругости используются две классические формы
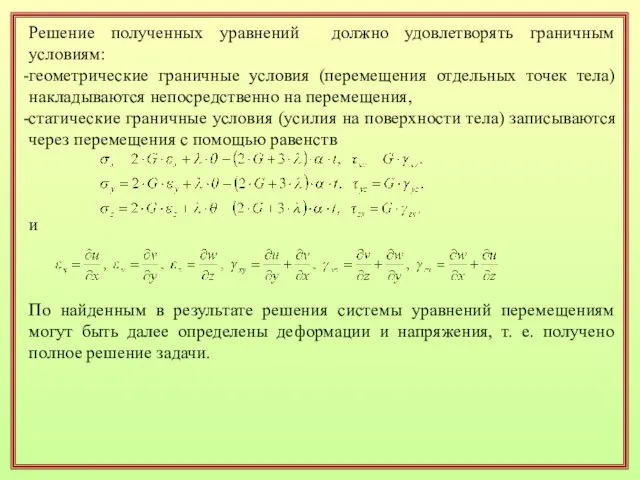
- 21. Решение полученных уравнений должно удовлетворять граничным условиям: геометрические граничные условия (перемещения отдельных точек тела) накладываются непосредственно
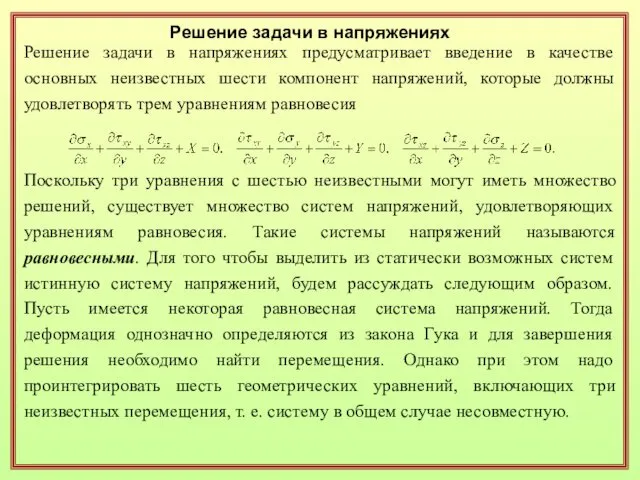
- 22. Решение задачи в напряжениях Решение задачи в напряжениях предусматривает введение в качестве основных неизвестных шести компонент
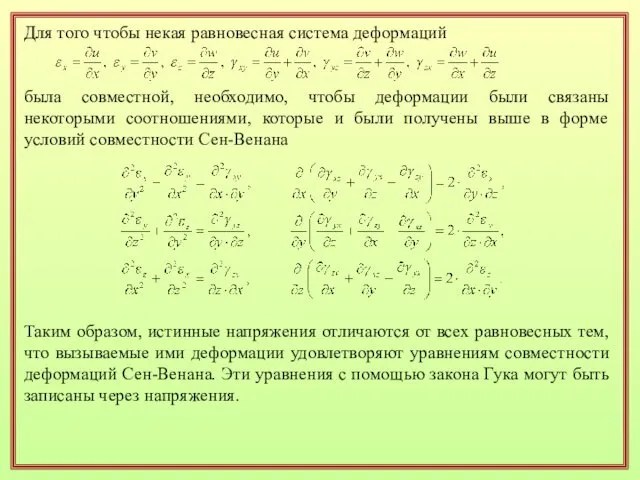
- 23. Для того чтобы некая равновесная система деформаций была совместной, необходимо, чтобы деформации были связаны некоторыми соотношениями,
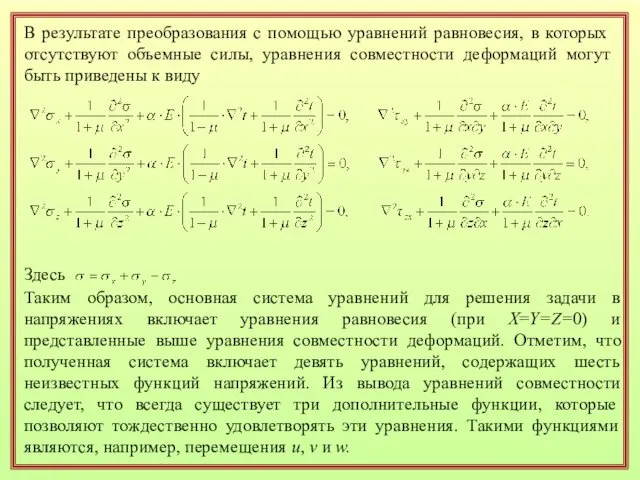
- 24. В результате преобразования с помощью уравнений равновесия, в которых отсутствуют объемные силы, уравнения совместности деформаций могут
- 25. Действительно, подставляя в условия совместности Сен-Венана функции деформации, выраженные с помощью геометрических соотношений Коши через три
- 26. 3. ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ ДЕФОРМАЦИИ УПРУГОЙ СИСТЕМЫ Рассмотрим непрерывное упругое тело, находящееся под внешним силовым и температурным
- 27. Выделяя из тела бесконечно малый параллелепипед со сторонами dx, dy, dz и заменяя влияние отброшенных частей
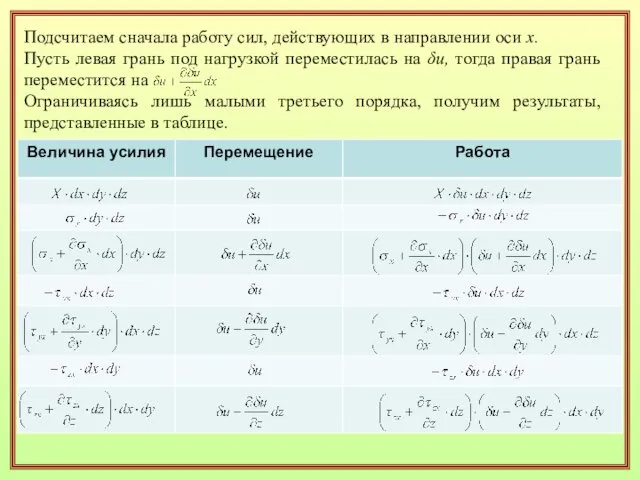
- 28. Подсчитаем сначала работу сил, действующих в направлении оси х. Пусть левая грань под нагрузкой переместилась на
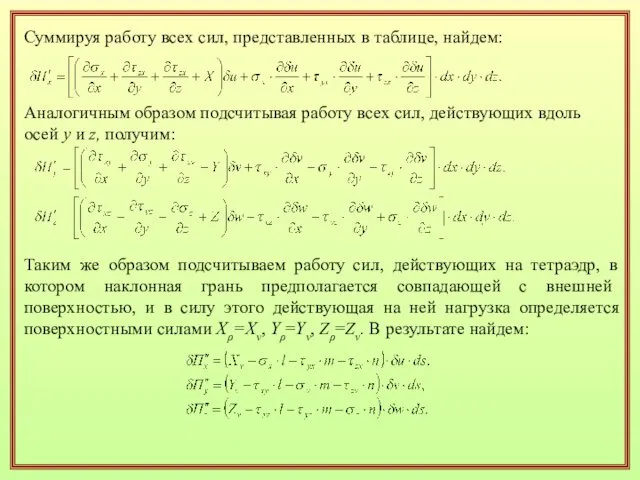
- 29. Суммируя работу всех сил, представленных в таблице, найдем: Аналогичным образом подсчитывая работу всех сил, действующих вдоль
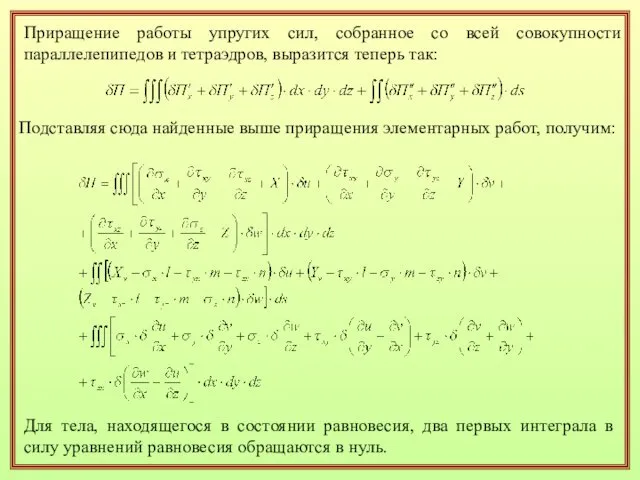
- 30. Приращение работы упругих сил, собранное со всей совокупности параллелепипедов и тетраэдров, выразится теперь так: Подставляя сюда
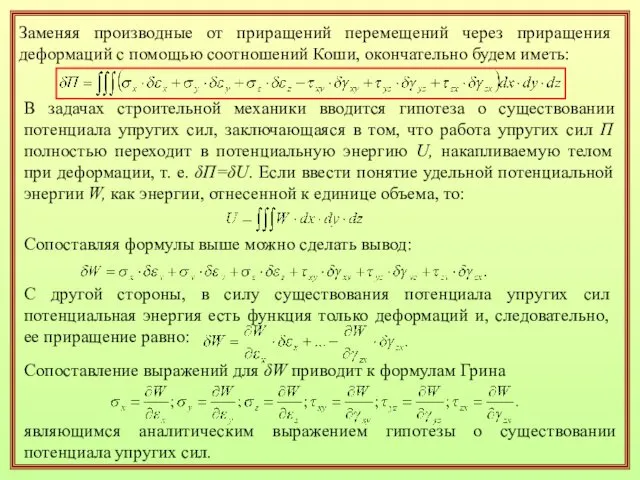
- 31. Заменяя производные от приращений перемещений через приращения деформаций с помощью соотношений Коши, окончательно будем иметь: В
- 32. Следует сделать оговорку о том, что введенное понятие упругого потенциала в рамках термоупругой задачи закономерно лишь
- 33. 4. ВАРИАЦИОННОЕ РЕШЕНИЕ ЗАДАЧИ В ПЕРЕМЕЩЕНИЯХ Согласно изложенному выше истинные напряжения, деформации и перемещения, реализующиеся в
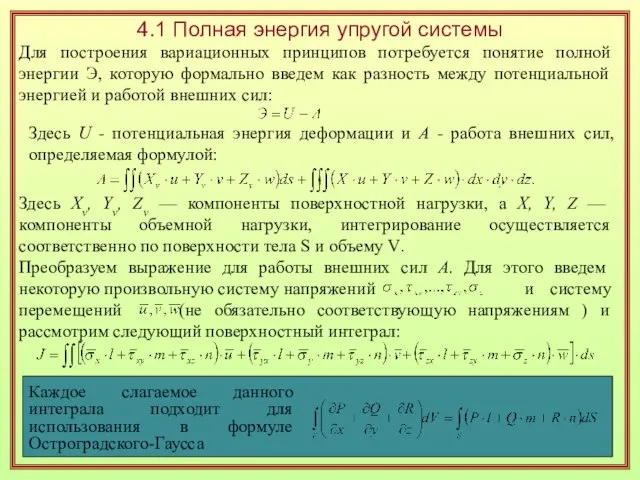
- 34. 4.1 Полная энергия упругой системы Для построения вариационных принципов потребуется понятие полной энергии Э, которую формально
- 35. Преобразуем поверхностный интеграл J в объемный J1 на основании формулы Остроградского-Гаусса: и, кроме того, введем в
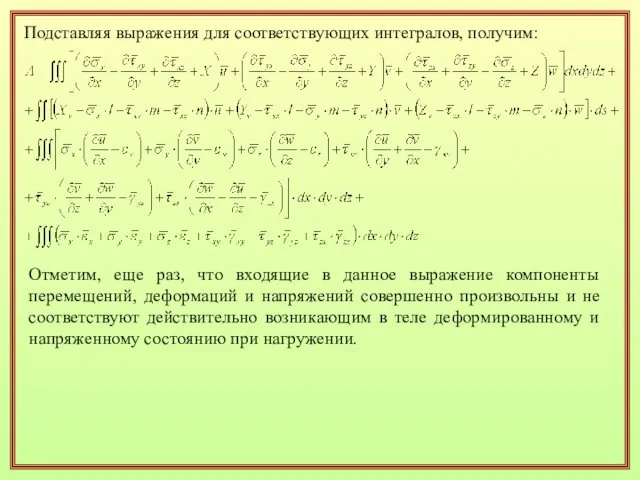
- 36. Подставляя выражения для соответствующих интегралов, получим: Отметим, еще раз, что входящие в данное выражение компоненты перемещений,
- 37. 4.2 Вариационный принцип Лагранжа Вариационный принцип Лагранжа позволяет сформулировать энергетический признак, выделяющий истинную систему перемещений, возникающую
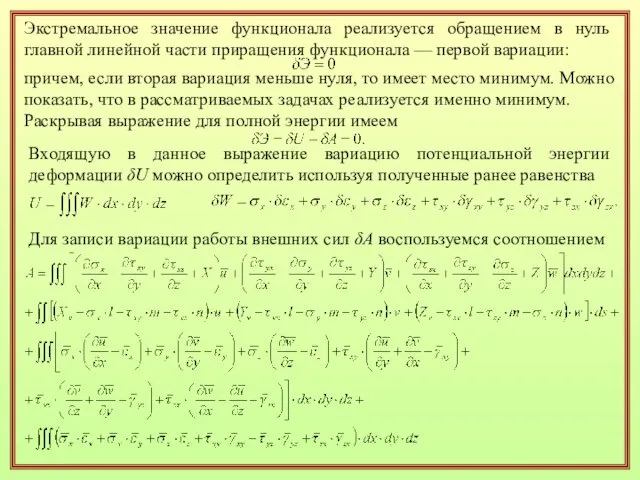
- 38. Экстремальное значение функционала реализуется обращением в нуль главной линейной части приращения функционала — первой вариации: причем,
- 39. Так как перемещения должны быть кинематически возможными, то, следовательно, должны удовлетворяться соотношения Коши и третий интеграл
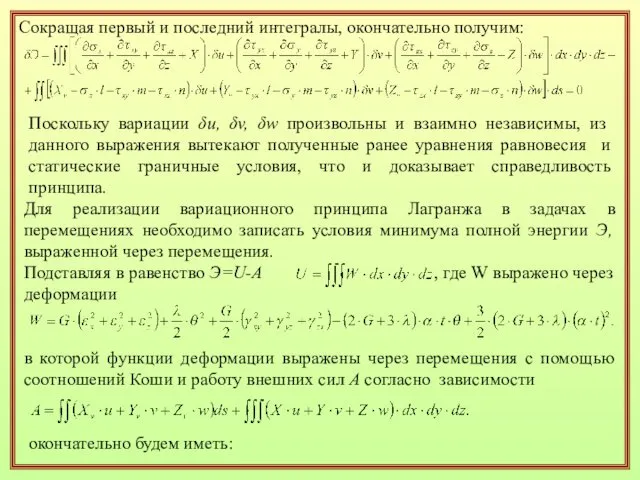
- 40. Сокращая первый и последний интегралы, окончательно получим: Поскольку вариации δи, δv, δw произвольны и взаимно независимы,
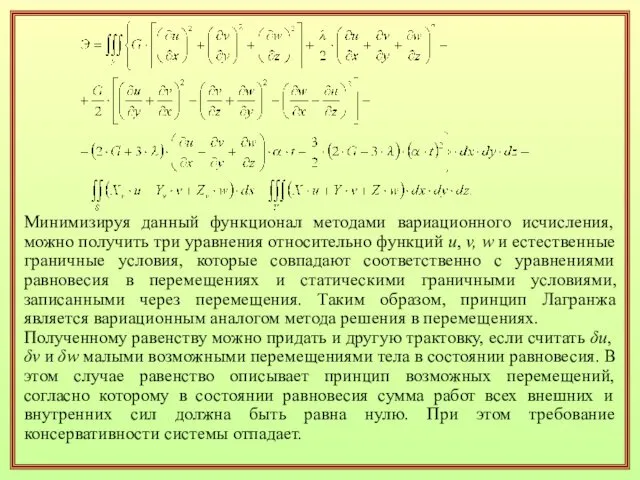
- 41. Минимизируя данный функционал методами вариационного исчисления, можно получить три уравнения относительно функций u, v, w и
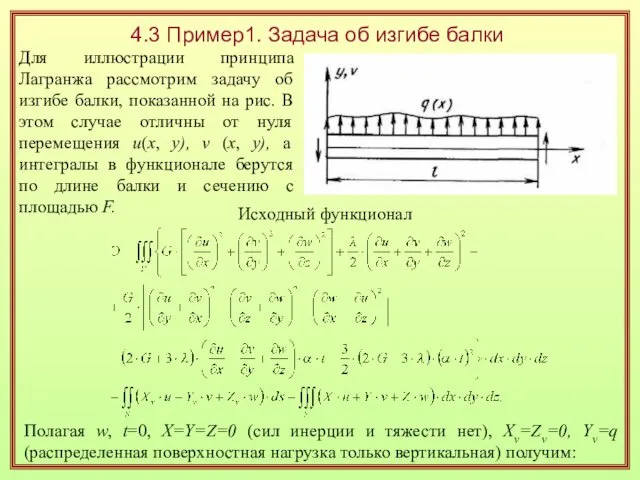
- 42. 4.3 Пример1. Задача об изгибе балки Для иллюстрации принципа Лагранжа рассмотрим задачу об изгибе балки, показанной
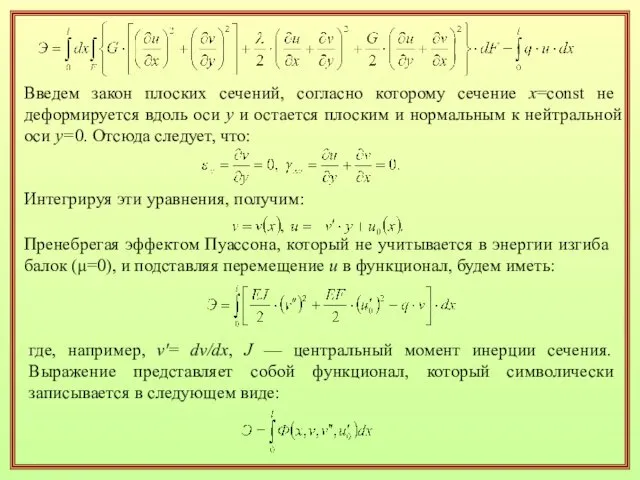
- 43. Введем закон плоских сечений, согласно которому сечение х=const не деформируется вдоль оси у и остается плоским
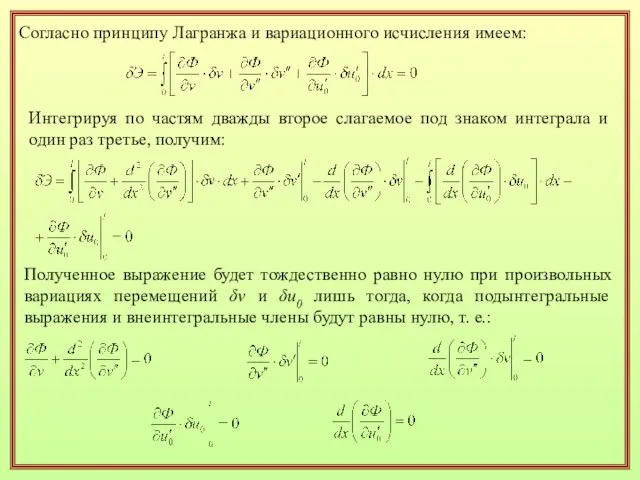
- 44. Согласно принципу Лагранжа и вариационного исчисления имеем: Интегрируя по частям дважды второе слагаемое под знаком интеграла
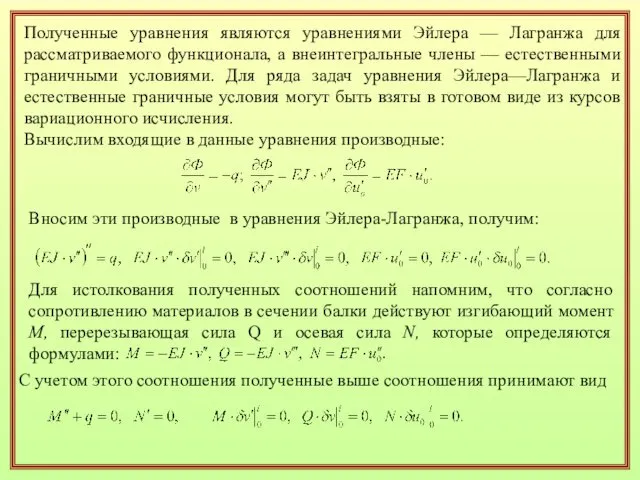
- 45. Полученные уравнения являются уравнениями Эйлера — Лагранжа для рассматриваемого функционала, а внеинтегральные члены — естественными граничными
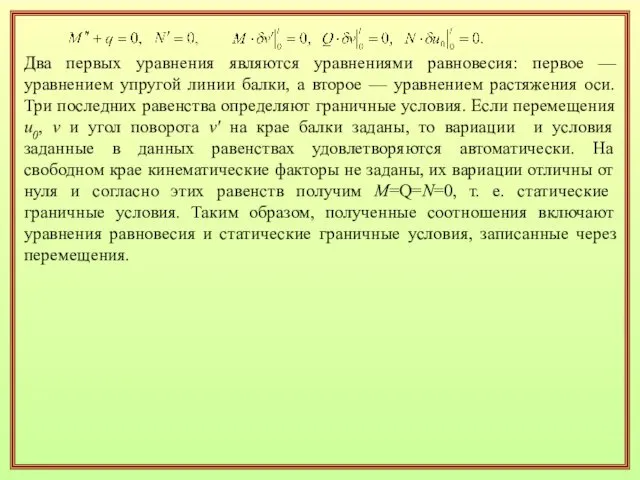
- 46. Два первых уравнения являются уравнениями равновесия: первое — уравнением упругой линии балки, а второе — уравнением
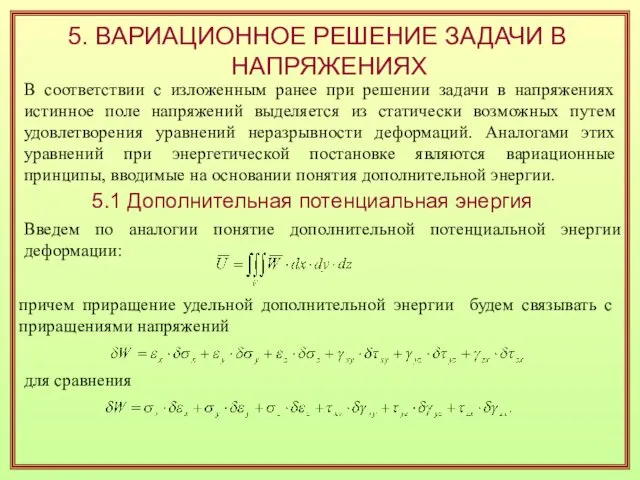
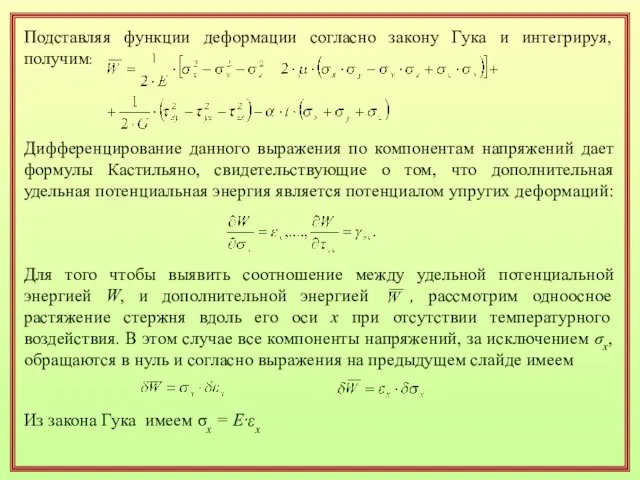
- 47. 5. ВАРИАЦИОННОЕ РЕШЕНИЕ ЗАДАЧИ В НАПРЯЖЕНИЯХ В соответствии с изложенным ранее при решении задачи в напряжениях
- 48. Подставляя функции деформации согласно закону Гука и интегрируя, получим: Дифференцирование данного выражения по компонентам напряжений дает
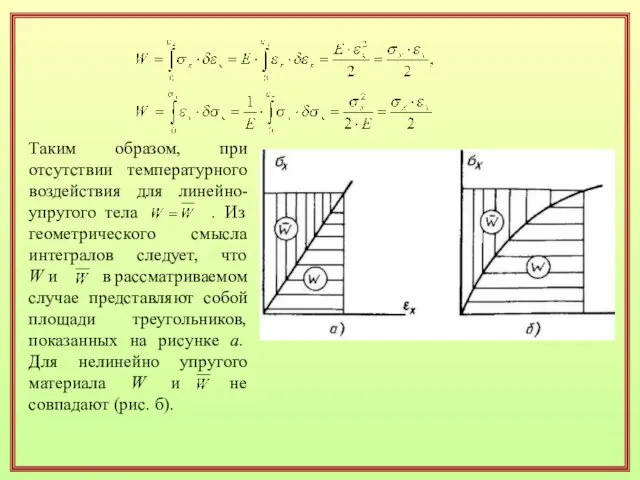
- 49. Таким образом, при отсутствии температурного воздействия для линейно-упругого тела . Из геометрического смысла интегралов следует, что
- 50. 5.2 Вариационный принцип Кастильяно Введем теперь по аналогии выражение полной энергии, записанной через дополнительную энергию Основной
- 51. Из равенств и имеем: Находим выражение для из зависимостей Выражение для получаем варьируя напряжения в зависимости
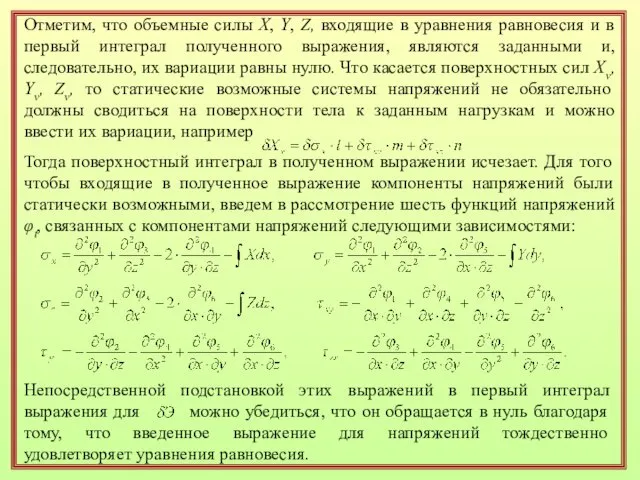
- 52. Отметим, что объемные силы X, Y, Z, входящие в уравнения равновесия и в первый интеграл полученного
- 53. Таким образом, в выражении для остается только последний интеграл, который принимает вид: Отметим, что при варьировании
- 54. Отметим, что согласно определения функции напряжений выражаются через вторые производные от функций напряжений. Значения их первых
- 55. Для аналитической записи принципа Кастильяно воспользуемся соотношением Применяя к первому интегралу формулу Остроградского и учитывая, что
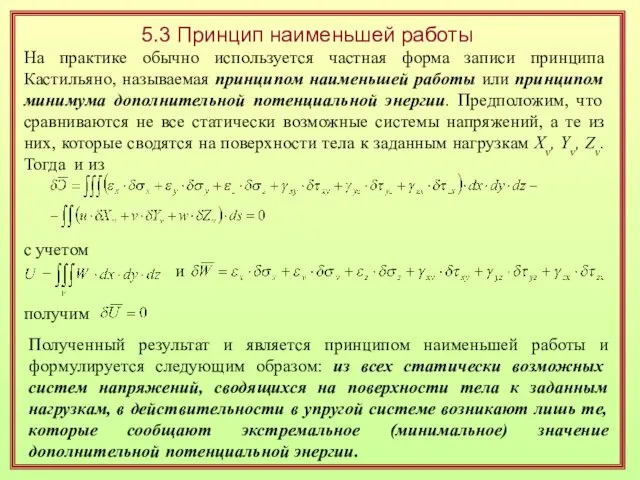
- 56. 5.3 Принцип наименьшей работы На практике обычно используется частная форма записи принципа Кастильяно, называемая принципом наименьшей
- 57. Для реализации принципа наименьшей работы необходимо записать условие минимума дополнительной потенциальной энергии, выраженной через напряжения. Согласно
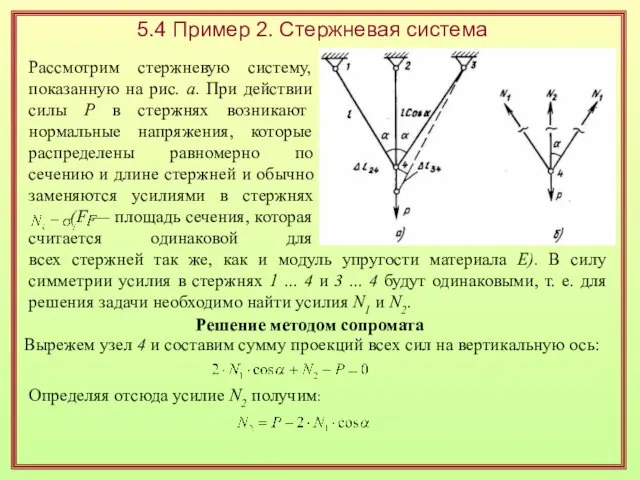
- 58. 5.4 Пример 2. Стержневая система Рассмотрим стержневую систему, показанную на рис. а. При действии силы Р
- 59. Для определения усилий необходимо записать условие совместности деформации стержней, которое следует непосредственно из рис. а и
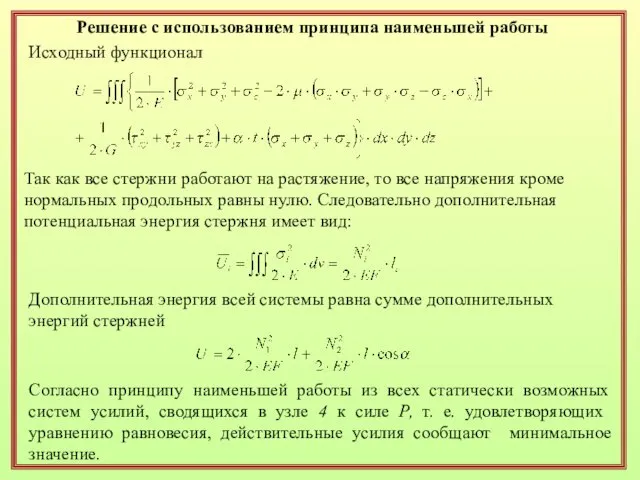
- 60. Решение с использованием принципа наименьшей работы Исходный функционал Так как все стержни работают на растяжение, то
- 61. Исключаем из выражения для дополнительной потенциальной энергии N2 с помощью уравнения равновесия: записываем условие минимума функции
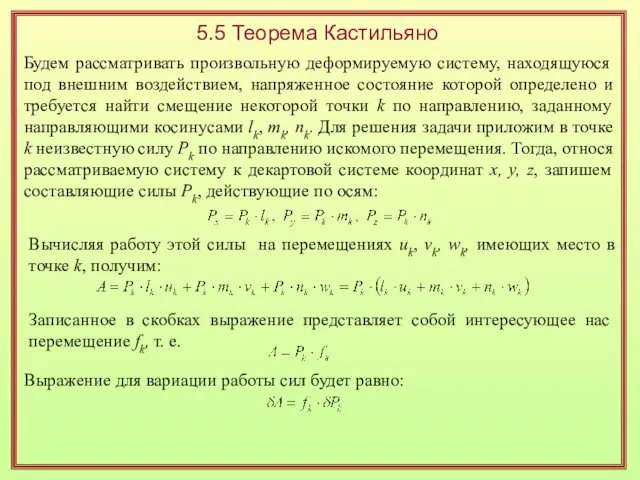
- 62. 5.5 Теорема Кастильяно Будем рассматривать произвольную деформируемую систему, находящуюся под внешним воздействием, напряженное состояние которой определено
- 63. Дополнительная потенциальная энергия в рассматриваемом случае будет функцией приложенной силы Pk и, следовательно, ее вариация примет
- 64. 5.6 Пример 2. Стержневая система (продолжение) Покажем как при помощи теоремы Кастильяно можно найти перемещение точки
- 65. Отсюда по теореме Кастильяно
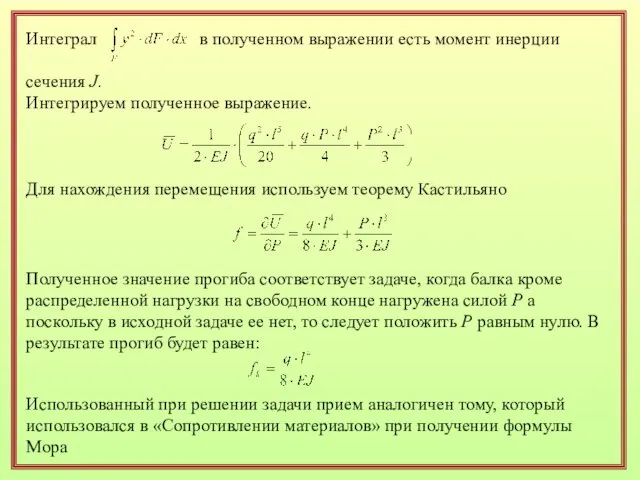
- 66. 5.7 Пример 3. Консольная балка Рассмотрим пример определения прогиба на конце консольной балки постоянной жесткости ЕJ,
- 67. Для определения дополнительной потенциальной энергии воспользуемся выражением Так как работа перерезывающих сил намного меньше работы изгибающего
- 68. Интеграл в полученном выражении есть момент инерции сечения J. Интегрируем полученное выражение. Для нахождения перемещения используем
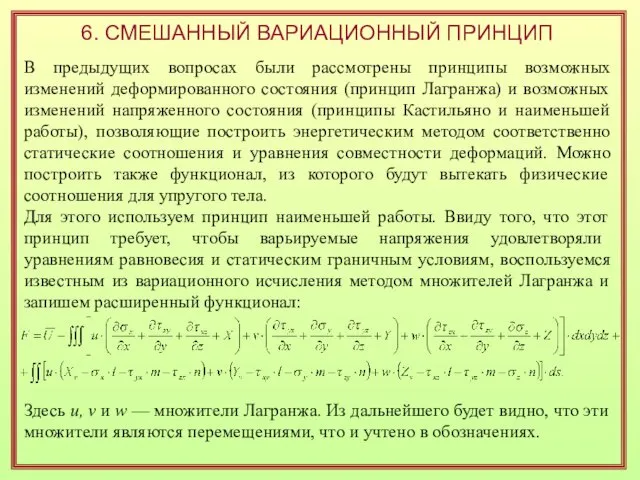
- 69. 6. СМЕШАННЫЙ ВАРИАЦИОННЫЙ ПРИНЦИП В предыдущих вопросах были рассмотрены принципы возможных изменений деформированного состояния (принцип Лагранжа)
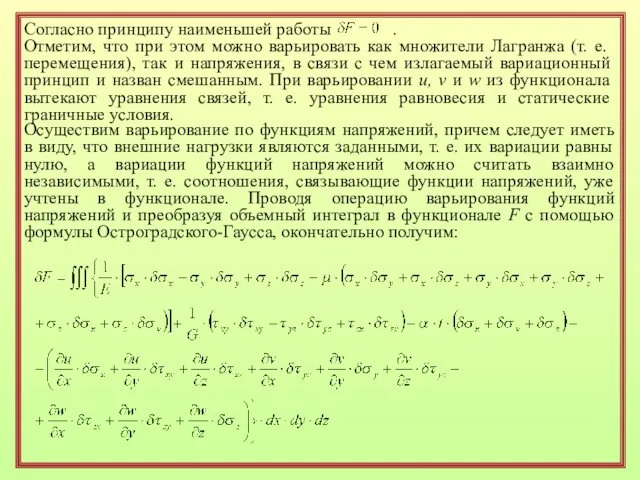
- 70. Согласно принципу наименьшей работы . Отметим, что при этом можно варьировать как множители Лагранжа (т. е.
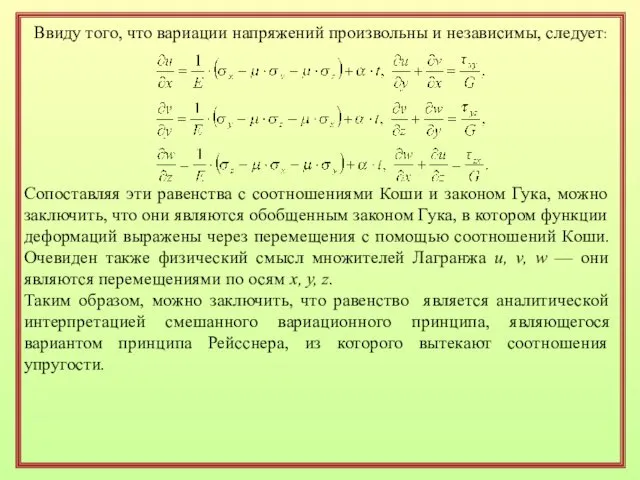
- 71. Ввиду того, что вариации напряжений произвольны и независимы, следует: Сопоставляя эти равенства с соотношениями Коши и
- 72. 7. Общие замечания относительно рассмотренных вариационных принципов. Из рассмотренного следует, что эти принципы позволяют по существу
- 74. Скачать презентацию
РЕКОМЕНДУЕМАЯ УЧЕБНО-МЕТОДИЧЕСКАЯ ЛИТЕРАТУРА
курса строительной механики
У ч е б н
курса строительной механики
У ч е б н
Строительная механика –
наука, занимающаяся разработкой
принципов и методов расчёта
сооружений
Строительная механика –
наука, занимающаяся разработкой
принципов и методов расчёта
сооружений
С точки зрения строительной механики
под расчётом конструкции в целом
или
под расчётом конструкции в целом
или

СТРОИТЕЛЬНАЯ
механика
Стержневых Пластин Комбинированных систем и оболочек систем
Математика
Детали машин
И
СТРОИТЕЛЬНАЯ
механика
Стержневых Пластин Комбинированных систем и оболочек систем
Математика
Детали машин
И
1. ТЕОРИЯ НАПРЯЖЕНИЙ И ДЕФОРМАЦИЙ
1.1 Теория деформаций
Обозначим компоненты смещения произвольной точки
1. ТЕОРИЯ НАПРЯЖЕНИЙ И ДЕФОРМАЦИЙ
1.1 Теория деформаций
Обозначим компоненты смещения произвольной точки
При совмещении направлений ρ, ρ1, ρ2 с координатами х, у, z
При совмещении направлений ρ, ρ1, ρ2 с координатами х, у, z
Соотношение Коши определяют шесть компонент деформаций через частные производные от трех
Соотношение Коши определяют шесть компонент деформаций через частные производные от трех
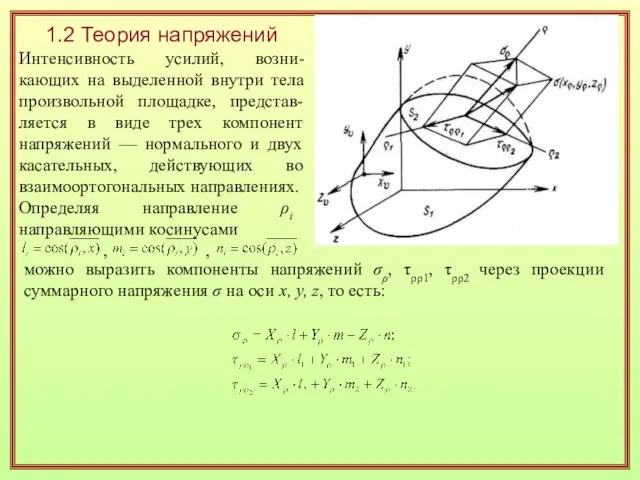
1.2 Теория напряжений
Интенсивность усилий, возни-кающих на выделенной внутри тела произвольной площадке,
1.2 Теория напряжений
Интенсивность усилий, возни-кающих на выделенной внутри тела произвольной площадке,
Основными законами, связывающими компоненты напряжений, являются уравнения равновесия. Для получения их
Основными законами, связывающими компоненты напряжений, являются уравнения равновесия. Для получения их
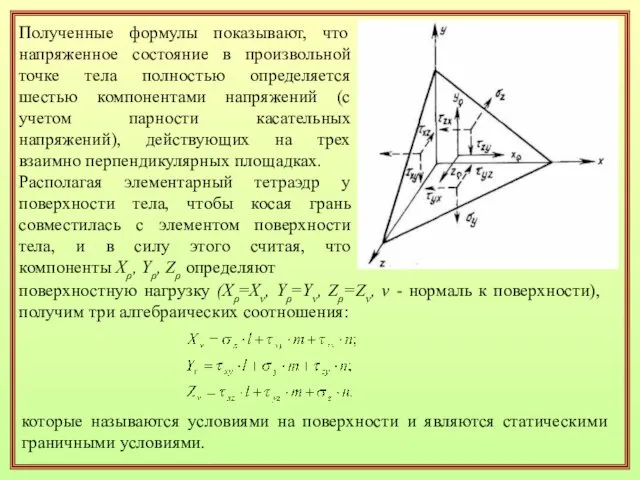
Полученные формулы показывают, что напряженное состояние в произвольной точке тела полностью
Полученные формулы показывают, что напряженное состояние в произвольной точке тела полностью
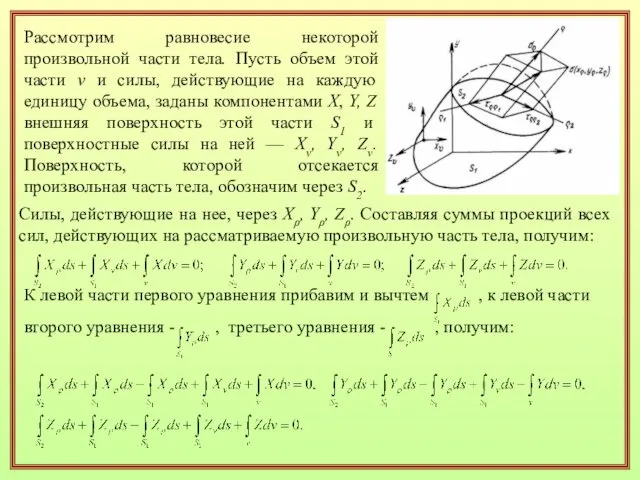
Рассмотрим равновесие некоторой произвольной части тела. Пусть объем этой части v
Рассмотрим равновесие некоторой произвольной части тела. Пусть объем этой части v
Первые интегралы в этих равенствах берутся по полной поверхности рассматриваемой части
Первые интегралы в этих равенствах берутся по полной поверхности рассматриваемой части
В скалярной форме формула имеет вид:
где dV, dS – дифференциалы объема
В скалярной форме формула имеет вид:
где dV, dS – дифференциалы объема
Полученные равенства должны тождественно выполняться для любого объема v, выделенного из
Полученные равенства должны тождественно выполняться для любого объема v, выделенного из
Уравнения равновесия
также могут быть получены и непосредственно как условия равновесия
Уравнения равновесия
также могут быть получены и непосредственно как условия равновесия

Физические соотношения
Физические зависимости в линейной теории упругости для изотропного тела представлены
Физические соотношения
Физические зависимости в линейной теории упругости для изотропного тела представлены
Подставляя значения упругих деформаций получим уравнения закона Гука при температурном воздействии
или
Подставляя значения упругих деформаций получим уравнения закона Гука при температурном воздействии
или
Таким образом, полная система уравнений теории упругости включает 15 уравнений:
три
Таким образом, полная система уравнений теории упругости включает 15 уравнений:
три
2. МЕТОДЫ РЕШЕНИЯ ЗАДАЧ В ПЕРЕМЕЩЕНИЯХ И В НАПРЯЖЕНИЯХ
В теории упругости
2. МЕТОДЫ РЕШЕНИЯ ЗАДАЧ В ПЕРЕМЕЩЕНИЯХ И В НАПРЯЖЕНИЯХ
В теории упругости
Решение полученных уравнений должно удовлетворять граничным условиям:
геометрические граничные условия (перемещения отдельных
Решение полученных уравнений должно удовлетворять граничным условиям:
геометрические граничные условия (перемещения отдельных
Решение задачи в напряжениях
Решение задачи в напряжениях предусматривает введение в
Решение задачи в напряжениях
Решение задачи в напряжениях предусматривает введение в
Для того чтобы некая равновесная система деформаций
была совместной, необходимо, чтобы
Для того чтобы некая равновесная система деформаций
была совместной, необходимо, чтобы
В результате преобразования с помощью уравнений равновесия, в которых отсутствуют объемные
В результате преобразования с помощью уравнений равновесия, в которых отсутствуют объемные
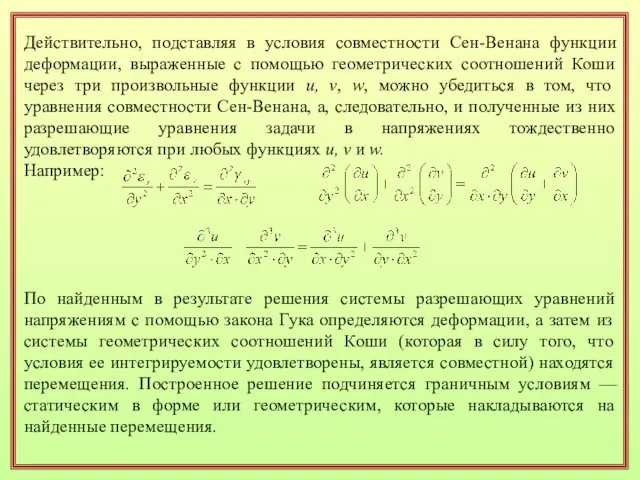
Действительно, подставляя в условия совместности Сен-Венана функции деформации, выраженные с помощью
Действительно, подставляя в условия совместности Сен-Венана функции деформации, выраженные с помощью
3. ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ ДЕФОРМАЦИИ УПРУГОЙ СИСТЕМЫ
Рассмотрим непрерывное упругое тело, находящееся под
3. ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ ДЕФОРМАЦИИ УПРУГОЙ СИСТЕМЫ
Рассмотрим непрерывное упругое тело, находящееся под
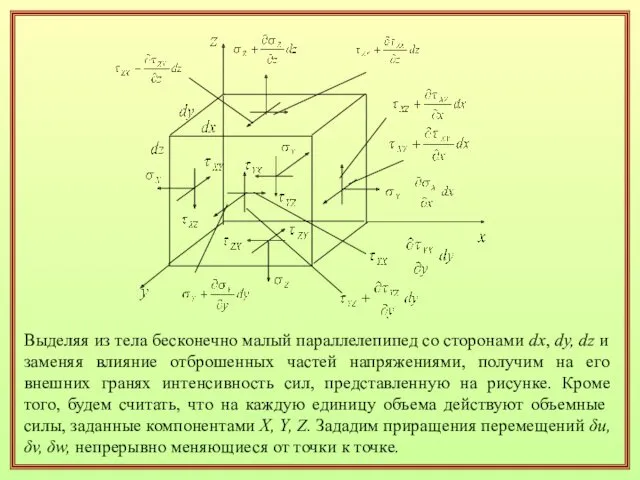
Выделяя из тела бесконечно малый параллелепипед со сторонами dx, dy, dz
Выделяя из тела бесконечно малый параллелепипед со сторонами dx, dy, dz
Подсчитаем сначала работу сил, действующих в направлении оси х.
Пусть левая грань
Подсчитаем сначала работу сил, действующих в направлении оси х.
Пусть левая грань
Суммируя работу всех сил, представленных в таблице, найдем:
Аналогичным образом подсчитывая работу
Суммируя работу всех сил, представленных в таблице, найдем:
Аналогичным образом подсчитывая работу
Приращение работы упругих сил, собранное со всей совокупности параллелепипедов и тетраэдров,
Приращение работы упругих сил, собранное со всей совокупности параллелепипедов и тетраэдров,
Заменяя производные от приращений перемещений через приращения деформаций с помощью соотношений
Заменяя производные от приращений перемещений через приращения деформаций с помощью соотношений
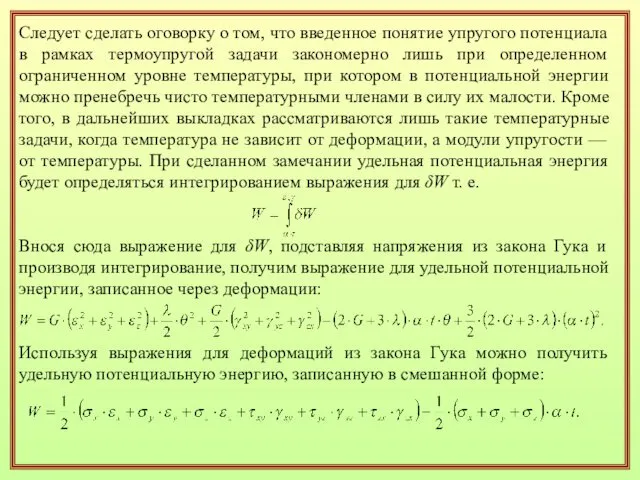
Следует сделать оговорку о том, что введенное понятие упругого потенциала в
Следует сделать оговорку о том, что введенное понятие упругого потенциала в
4. ВАРИАЦИОННОЕ РЕШЕНИЕ ЗАДАЧИ В ПЕРЕМЕЩЕНИЯХ
Согласно изложенному выше истинные напряжения, деформации
4. ВАРИАЦИОННОЕ РЕШЕНИЕ ЗАДАЧИ В ПЕРЕМЕЩЕНИЯХ
Согласно изложенному выше истинные напряжения, деформации
4.1 Полная энергия упругой системы
Для построения вариационных принципов потребуется понятие полной
4.1 Полная энергия упругой системы
Для построения вариационных принципов потребуется понятие полной
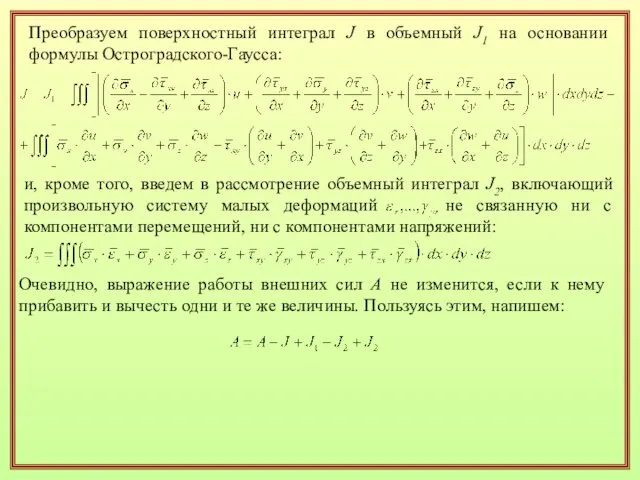
Преобразуем поверхностный интеграл J в объемный J1 на основании формулы Остроградского-Гаусса:
и,
Преобразуем поверхностный интеграл J в объемный J1 на основании формулы Остроградского-Гаусса:
и,
Подставляя выражения для соответствующих интегралов, получим:
Отметим, еще раз, что входящие в
Подставляя выражения для соответствующих интегралов, получим:
Отметим, еще раз, что входящие в
4.2 Вариационный принцип Лагранжа
Вариационный принцип Лагранжа позволяет сформулировать энергетический признак, выделяющий
4.2 Вариационный принцип Лагранжа
Вариационный принцип Лагранжа позволяет сформулировать энергетический признак, выделяющий
Экстремальное значение функционала реализуется обращением в нуль главной линейной части приращения
Экстремальное значение функционала реализуется обращением в нуль главной линейной части приращения
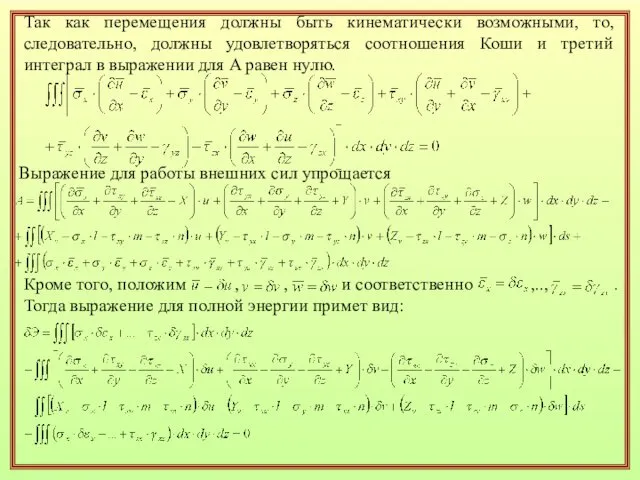
Так как перемещения должны быть кинематически возможными, то, следовательно, должны удовлетворяться
Так как перемещения должны быть кинематически возможными, то, следовательно, должны удовлетворяться
Сокращая первый и последний интегралы, окончательно получим:
Поскольку вариации δи, δv, δw
Сокращая первый и последний интегралы, окончательно получим:
Поскольку вариации δи, δv, δw
Минимизируя данный функционал методами вариационного исчисления, можно получить три уравнения относительно
Минимизируя данный функционал методами вариационного исчисления, можно получить три уравнения относительно
4.3 Пример1. Задача об изгибе балки
Для иллюстрации принципа Лагранжа рассмотрим задачу
4.3 Пример1. Задача об изгибе балки
Для иллюстрации принципа Лагранжа рассмотрим задачу
Введем закон плоских сечений, согласно которому сечение х=const не деформируется вдоль
Введем закон плоских сечений, согласно которому сечение х=const не деформируется вдоль
Согласно принципу Лагранжа и вариационного исчисления имеем:
Интегрируя по частям дважды второе
Согласно принципу Лагранжа и вариационного исчисления имеем:
Интегрируя по частям дважды второе
Полученные уравнения являются уравнениями Эйлера — Лагранжа для рассматриваемого функционала, а
Полученные уравнения являются уравнениями Эйлера — Лагранжа для рассматриваемого функционала, а
Два первых уравнения являются уравнениями равновесия: первое — уравнением упругой линии
Два первых уравнения являются уравнениями равновесия: первое — уравнением упругой линии
5. ВАРИАЦИОННОЕ РЕШЕНИЕ ЗАДАЧИ В НАПРЯЖЕНИЯХ
В соответствии с изложенным ранее при
5. ВАРИАЦИОННОЕ РЕШЕНИЕ ЗАДАЧИ В НАПРЯЖЕНИЯХ
В соответствии с изложенным ранее при
Подставляя функции деформации согласно закону Гука и интегрируя, получим:
Дифференцирование данного выражения
Подставляя функции деформации согласно закону Гука и интегрируя, получим:
Дифференцирование данного выражения
Таким образом, при отсутствии температурного воздействия для линейно-упругого тела . Из
Таким образом, при отсутствии температурного воздействия для линейно-упругого тела . Из
5.2 Вариационный принцип Кастильяно
Введем теперь по аналогии выражение полной энергии, записанной
5.2 Вариационный принцип Кастильяно
Введем теперь по аналогии выражение полной энергии, записанной
Из равенств и имеем:
Находим выражение для из зависимостей
Выражение для получаем варьируя
Из равенств и имеем:
Находим выражение для из зависимостей
Выражение для получаем варьируя
Отметим, что объемные силы X, Y, Z, входящие в уравнения равновесия
Отметим, что объемные силы X, Y, Z, входящие в уравнения равновесия
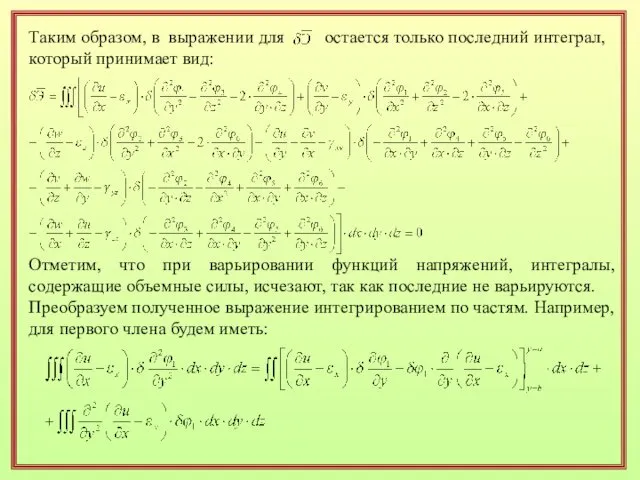
Таким образом, в выражении для остается только последний интеграл, который принимает
Таким образом, в выражении для остается только последний интеграл, который принимает
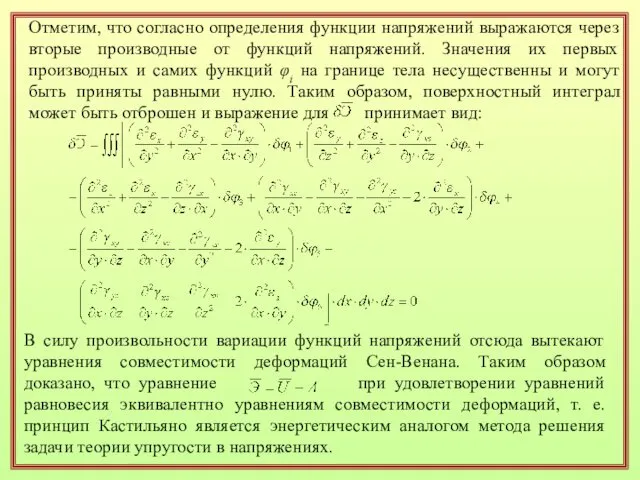
Отметим, что согласно определения функции напряжений выражаются через вторые производные от
Отметим, что согласно определения функции напряжений выражаются через вторые производные от
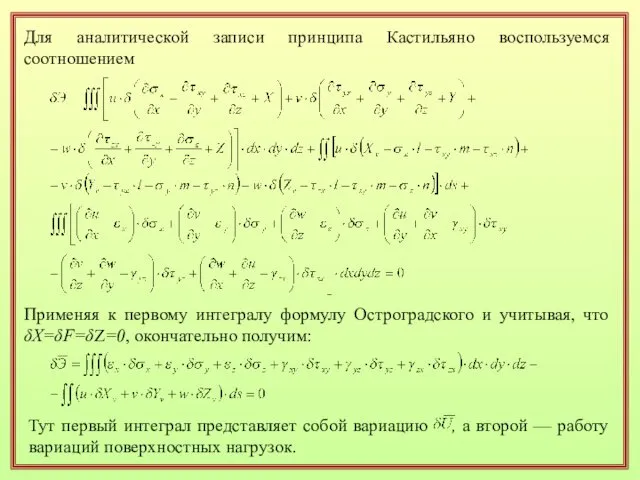
Для аналитической записи принципа Кастильяно воспользуемся соотношением
Применяя к первому интегралу формулу
Для аналитической записи принципа Кастильяно воспользуемся соотношением
Применяя к первому интегралу формулу
5.3 Принцип наименьшей работы
На практике обычно используется частная форма записи принципа
5.3 Принцип наименьшей работы
На практике обычно используется частная форма записи принципа
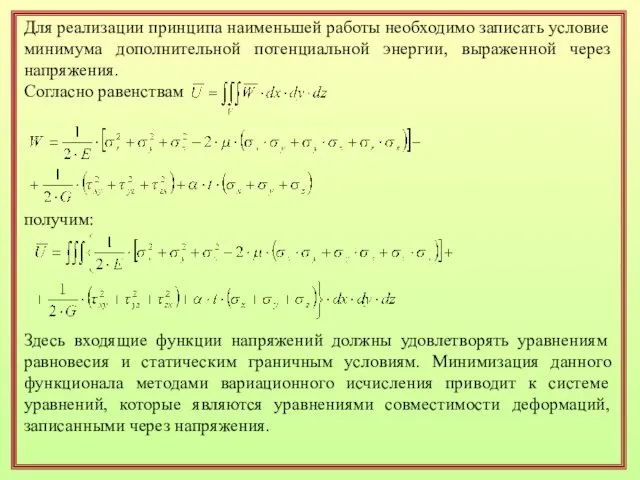
Для реализации принципа наименьшей работы необходимо записать условие минимума дополнительной потенциальной
Для реализации принципа наименьшей работы необходимо записать условие минимума дополнительной потенциальной
5.4 Пример 2. Стержневая система
Рассмотрим стержневую систему, показанную на рис. а.
5.4 Пример 2. Стержневая система
Рассмотрим стержневую систему, показанную на рис. а.
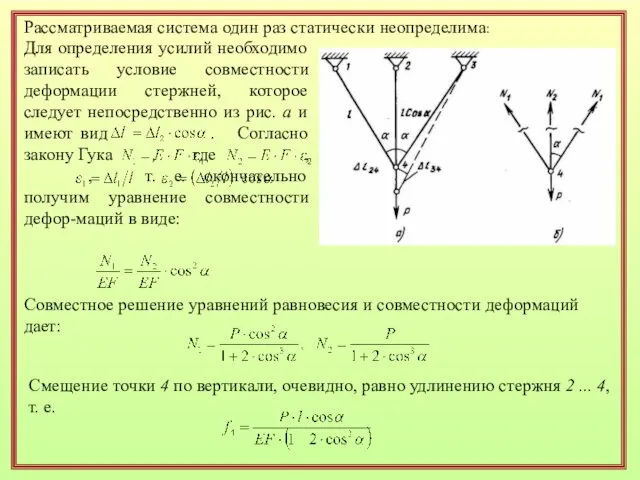
Для определения усилий необходимо записать условие совместности деформации стержней, которое следует
Для определения усилий необходимо записать условие совместности деформации стержней, которое следует
Решение с использованием принципа наименьшей работы
Исходный функционал
Так как все стержни работают
Решение с использованием принципа наименьшей работы
Исходный функционал
Так как все стержни работают
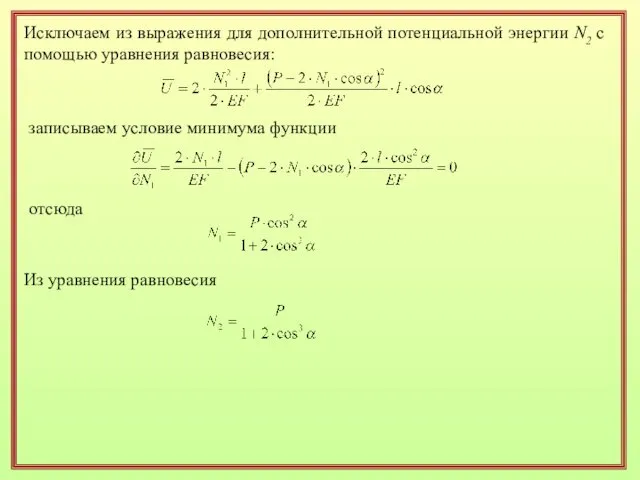
Исключаем из выражения для дополнительной потенциальной энергии N2 с помощью уравнения
Исключаем из выражения для дополнительной потенциальной энергии N2 с помощью уравнения
5.5 Теорема Кастильяно
Будем рассматривать произвольную деформируемую систему, находящуюся под внешним воздействием,
5.5 Теорема Кастильяно
Будем рассматривать произвольную деформируемую систему, находящуюся под внешним воздействием,
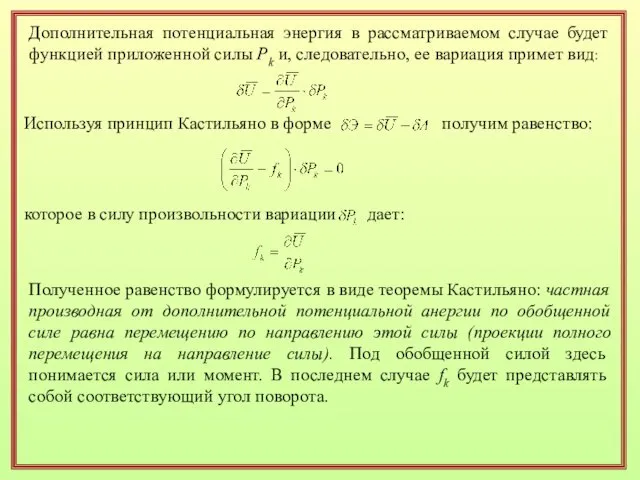
Дополнительная потенциальная энергия в рассматриваемом случае будет функцией приложенной силы Pk
Дополнительная потенциальная энергия в рассматриваемом случае будет функцией приложенной силы Pk
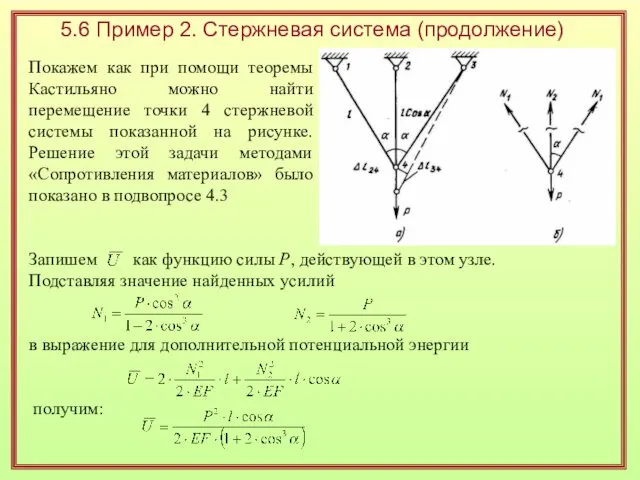
5.6 Пример 2. Стержневая система (продолжение)
Покажем как при помощи теоремы Кастильяно
5.6 Пример 2. Стержневая система (продолжение)
Покажем как при помощи теоремы Кастильяно
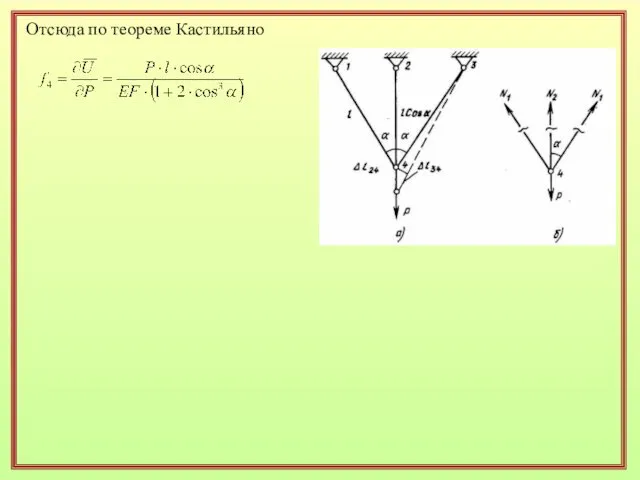
Отсюда по теореме Кастильяно
Отсюда по теореме Кастильяно
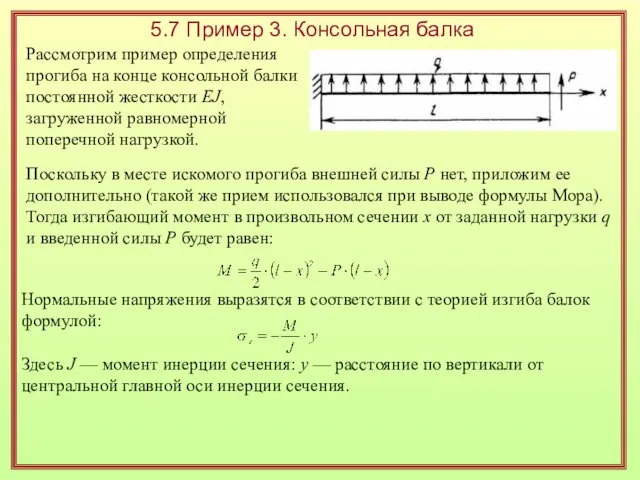
5.7 Пример 3. Консольная балка
Рассмотрим пример определения прогиба на конце консольной
5.7 Пример 3. Консольная балка
Рассмотрим пример определения прогиба на конце консольной
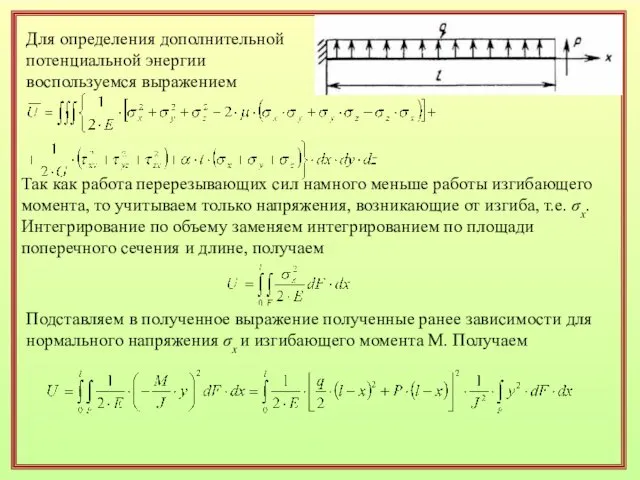
Для определения дополнительной потенциальной энергии воспользуемся выражением
Так как работа перерезывающих сил
Для определения дополнительной потенциальной энергии воспользуемся выражением
Так как работа перерезывающих сил
Интеграл в полученном выражении есть момент инерции
сечения J.
Интегрируем полученное
Интеграл в полученном выражении есть момент инерции
сечения J.
Интегрируем полученное
6. СМЕШАННЫЙ ВАРИАЦИОННЫЙ ПРИНЦИП
В предыдущих вопросах были рассмотрены принципы возможных изменений
6. СМЕШАННЫЙ ВАРИАЦИОННЫЙ ПРИНЦИП
В предыдущих вопросах были рассмотрены принципы возможных изменений
Согласно принципу наименьшей работы .
Отметим, что при этом можно варьировать
Согласно принципу наименьшей работы .
Отметим, что при этом можно варьировать
Ввиду того, что вариации напряжений произвольны и независимы, следует:
Сопоставляя эти равенства
Ввиду того, что вариации напряжений произвольны и независимы, следует:
Сопоставляя эти равенства
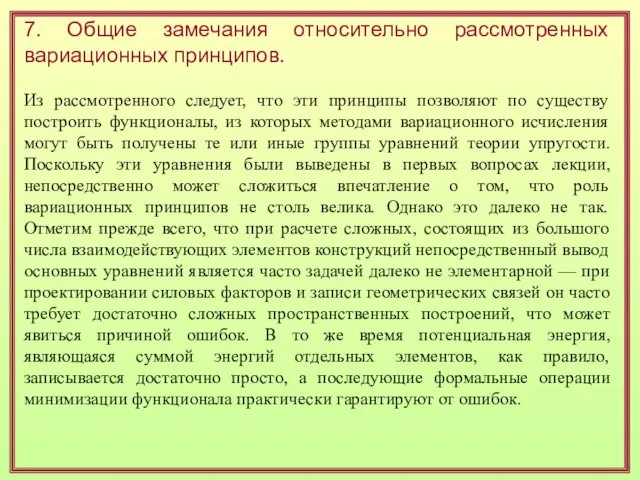
7. Общие замечания относительно рассмотренных вариационных принципов.
Из рассмотренного следует, что
7. Общие замечания относительно рассмотренных вариационных принципов.
Из рассмотренного следует, что
 Жидкие кристаллы
Жидкие кристаллы Переменный электрический ток
Переменный электрический ток 20240125_ya_i_moy_nastavnik_2_
20240125_ya_i_moy_nastavnik_2_ Подготовка к ЕГЭ и ГИА по физике (вариант 1, задания 13-32)
Подготовка к ЕГЭ и ГИА по физике (вариант 1, задания 13-32) Газдың қысымы. Ауырлық күшінің әрекетінен сұйықтар, газдарда болатын қысым
Газдың қысымы. Ауырлық күшінің әрекетінен сұйықтар, газдарда болатын қысым Лекция 8. Магнитоэлектрические приборы
Лекция 8. Магнитоэлектрические приборы Момент силы относительно центра (точки)
Момент силы относительно центра (точки) Защита от перенапряжений в электоустановках. (Лекция 16)
Защита от перенапряжений в электоустановках. (Лекция 16) презентация Давление.
презентация Давление. Колебательное движение.
Колебательное движение. Силы в природе
Силы в природе Стан та перспективи розвитку ремонтно-обслуговуючої бази сільськогосподарської техніки
Стан та перспективи розвитку ремонтно-обслуговуючої бази сільськогосподарської техніки Давление твердых тел, жидкостей и газов
Давление твердых тел, жидкостей и газов урок в 7 классе по теме Закон Паскаля
урок в 7 классе по теме Закон Паскаля Күн энергиясын тұрғын үйде қолдану
Күн энергиясын тұрғын үйде қолдану Выяснение условия равновесия рычага
Выяснение условия равновесия рычага Выполнение судовых работ. Рулевые устройства
Выполнение судовых работ. Рулевые устройства Новые методы обучения в условиях реализации ФГОС
Новые методы обучения в условиях реализации ФГОС Измерение работы силы трения, расчет погрешностей косвенных измерений
Измерение работы силы трения, расчет погрешностей косвенных измерений Структура механизмов
Структура механизмов Теория динамических систем. Введение
Теория динамических систем. Введение Золотое правило механики. 7 класс
Золотое правило механики. 7 класс Лекция 9. Расчет пространственных систем
Лекция 9. Расчет пространственных систем Корабельные гироскопические системы. (Тема 2)
Корабельные гироскопические системы. (Тема 2) Инструментальные методы исследования органических веществ
Инструментальные методы исследования органических веществ Притяжение Земли
Притяжение Земли Электрическое поле
Электрическое поле Дифракция света. Лекция 3
Дифракция света. Лекция 3