- Драйверы для Linux

Содержание
- 2. Общие понятия Строго говоря, драйвером считается фрагмент кода операционной системы, который позволяет ей обращаться к аппаратуре.
- 3. Общие понятия Касаясь характерных черт драйвера (работающего с полномочиями компонента ядра) для разных операционных систем -
- 4. Общие понятия В директории /dev/ можно открыть файл, соответствующий мышке и считывать постепенно байты данных, появляющиеся
- 5. Общие понятия Наблюдение 2. Драйверы стали легко заменяемой запасной частью в операционной системе. Если раньше и
- 6. Общие понятия Наблюдение 3. Концепция существования режима ядра (с большими функциональными возможностями и относительной бесконтрольности) и
- 7. Общие понятия Итак, драйвер управляет, контролирует, следит за работой объекта, который подчиняется командам драйвера. Драйвер шины
- 8. Общие понятия К числу примеров контроллеров устройств относятся контроллеры жестких дисков, контроллеры дисплеев и контроллеры аудиоустройств,
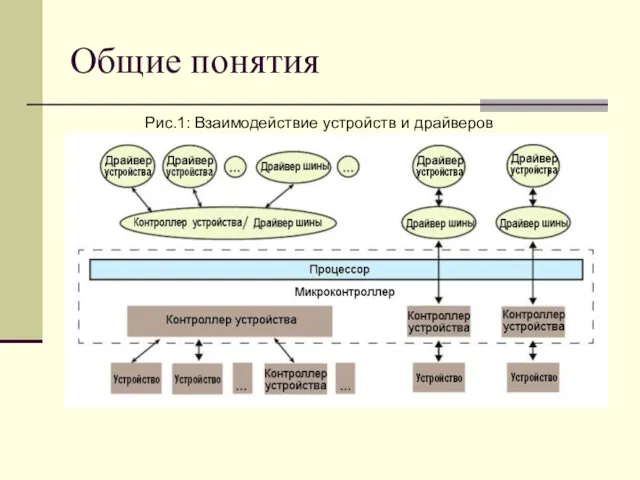
- 9. Общие понятия Рис.1: Взаимодействие устройств и драйверов
- 10. Общие понятия Ответ на этот вопрос не так уж сложен — разве что драйверы шин для
- 11. Общие понятия Короче говоря, драйвер устройства состоит из двух частей, одна из которых а) является специфической
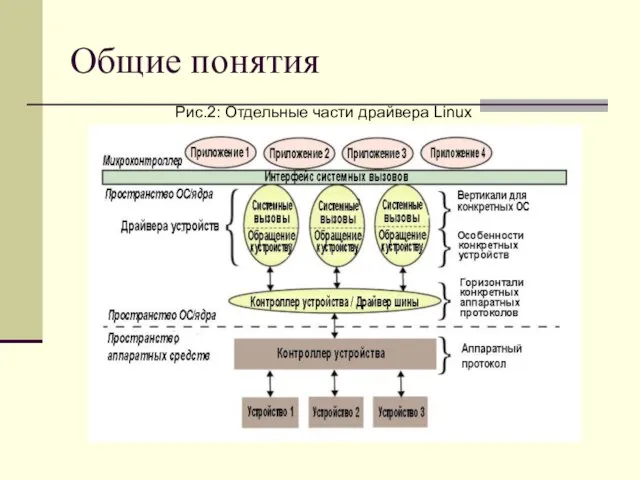
- 12. Общие понятия Рис.2: Отдельные части драйвера Linux
- 13. Общие понятия Та часть драйвера, которая зависит от ОС, тесно взаимодействует с механизмами ОС, реализующими пользовательский
- 14. Общие понятия Пакетно-ориентированная или сетевая вертикаль Блочно-ориентированная вертикаль или вертикаль хранения данных Байт-ориентированная вертикаль или вертикаль
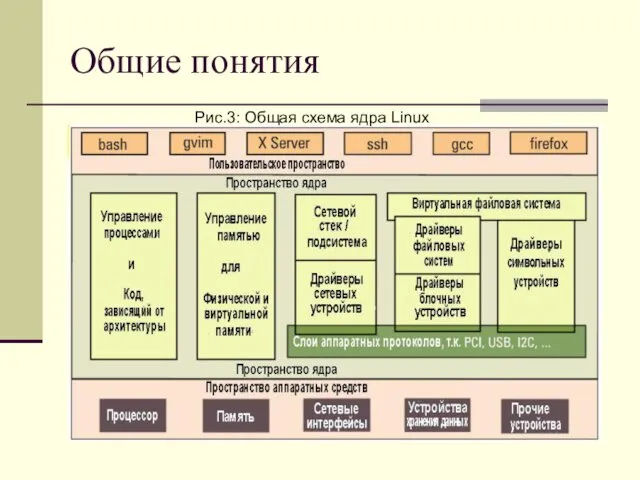
- 15. Общие понятия Рис.3: Общая схема ядра Linux
- 16. Общие понятия Таковы основные функциональные возможности любой ОС, будь то микроядро или монолитное ядро. Чаще всего
- 17. Общие понятия а) драйверов файловых систем, предназначенных для декодирования разнообразных форматов данных в различных разделах файловых
- 18. Общие понятия Драйверы со множественными вертикалями Последнее замечание относительно полной картины (размещения всех драйверов в экосистеме
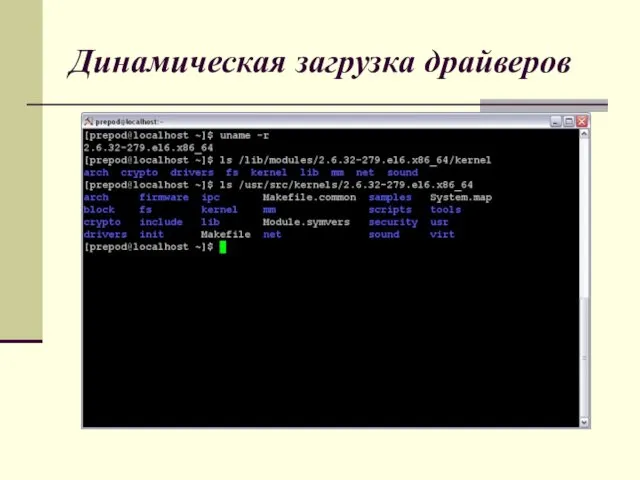
- 19. Динамическая загрузка драйверов Динамически загружаемые драйвера чаще всего называют модулями, которые собираются в виде отдельных модулей
- 20. Динамическая загрузка драйверов
- 21. Динамическая загрузка драйверов Чтобы динамически загружать и выгружать драйверы, воспользуйтесь следующими командами, которые находятся в директории
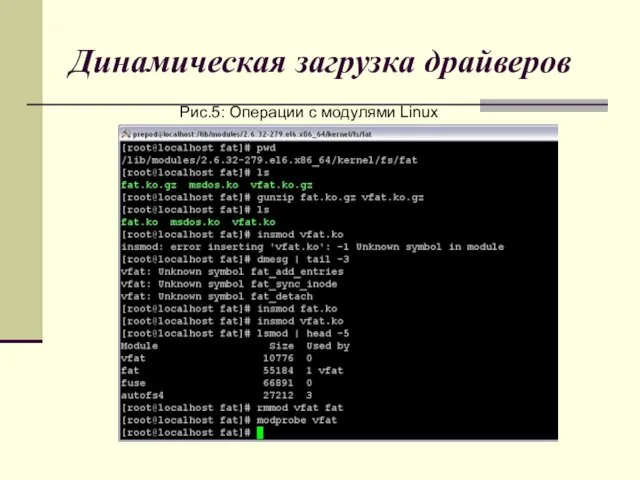
- 22. Динамическая загрузка драйверов Давайте в качестве примера рассмотрим соответствующие драйвера файловой системы FAT. На рис.5 показан
- 23. Динамическая загрузка драйверов Рис.5: Операции с модулями Linux
- 24. Динамическая загрузка драйверов Здесь также вызывается команда dmesg (сокр. от англ. display message или англ. driver
- 25. Первый драйвер для Linux Драйвер никогда не работает сам по себе. Он похож на библиотеку, загружаемую
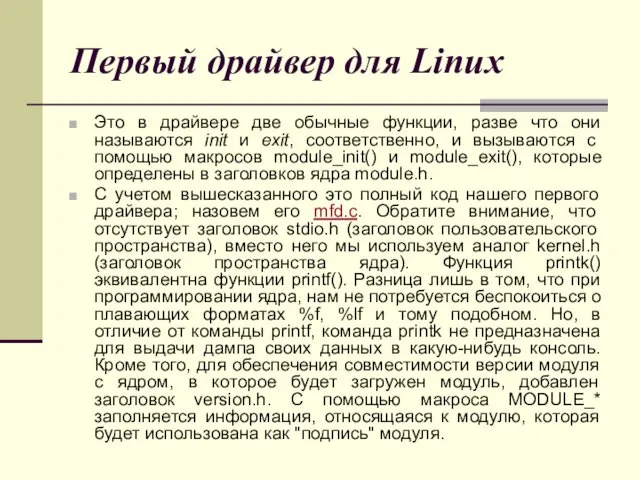
- 26. Первый драйвер для Linux Это в драйвере две обычные функции, разве что они называются init и
- 27. Сборка первого драйвера Так как у нас есть код на языке C, настало время его скомпилировать
- 28. Сборка первого драйвера Версию ядра можно определить утилитой uname –a Найти пакет можно на http://rpmfind.net/linux/rpm2html/ search.php?query=kernel
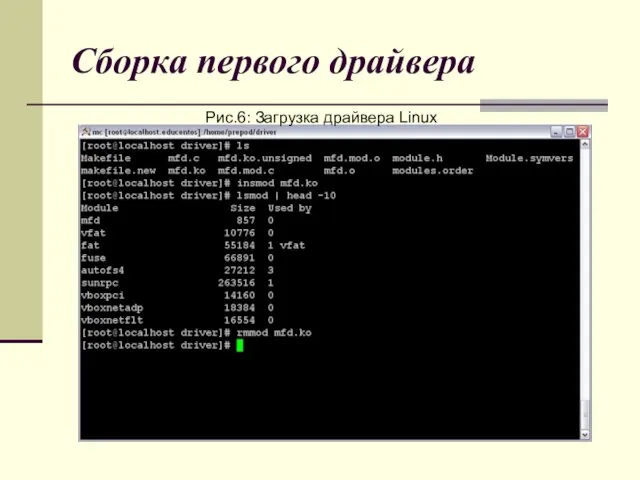
- 29. Сборка первого драйвера Рис.6: Загрузка драйвера Linux
- 30. Журнал сообщений ядра Команда printk не предназначена для выдачи дампа своих данных в какую-нибудь консоль. На
- 31. Журнал сообщений ядра #define KERN_EMERG " " /* system is unusable */ #define KERN_ALERT " "/*action
- 32. Журнал сообщений ядра Таким образом, все данные, выдаваемые командой printk, по умолчанию находятся в этом файле.
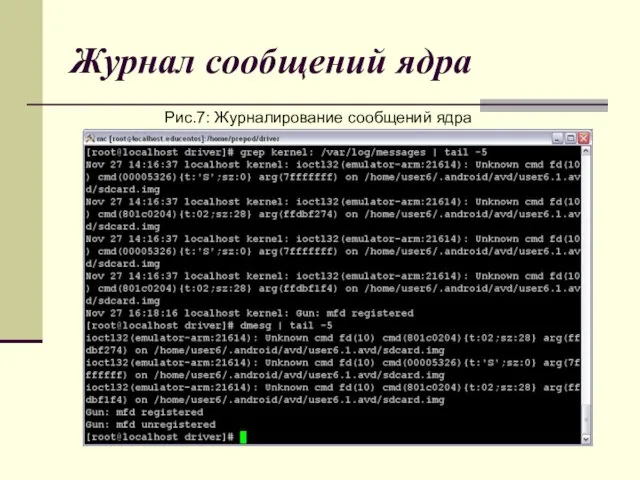
- 33. Журнал сообщений ядра Рис.7: Журналирование сообщений ядра
- 34. Язык С ядра — чистый С Для любой функции ядра требуется обработка ошибок, как правило, возвращаемых
- 35. Язык С ядра — чистый С Стандартный язык С является только языком программирования. Заголовочные файлы не
- 36. Символьные драйверы Linux Нереально за несколько лекций пересказать книгу "Драйверы устройств Linux" Джонатана Корбета, Алессандро Рубини
- 37. Символьные драйверы Linux Возьмем, к примеру, драйверы последовательного порта, аудио драйверы, и драйверы базового ввода/вывода. На
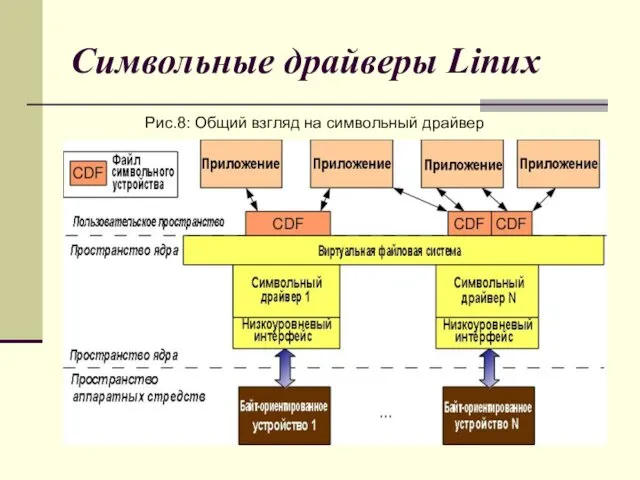
- 38. Символьные драйверы Linux Рис.8: Общий взгляд на символьный драйвер
- 39. Символьные драйверы Linux Это означает, что приложение выполняет обычные файловые операции с файлом символьного устройства. Эти
- 40. Символьные драйверы Linux Помните, что это обычное явление для файлов устройств. Давайте в качестве примера возьмем
- 41. Символьные драйверы Linux Приложение подключается к файлу устройства при помощи системного вызова open, открывающего файл устройства.
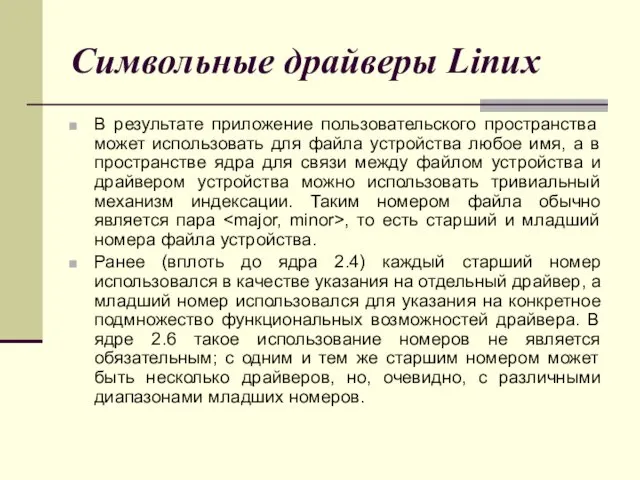
- 42. Символьные драйверы Linux В результате приложение пользовательского пространства может использовать для файла устройства любое имя, а
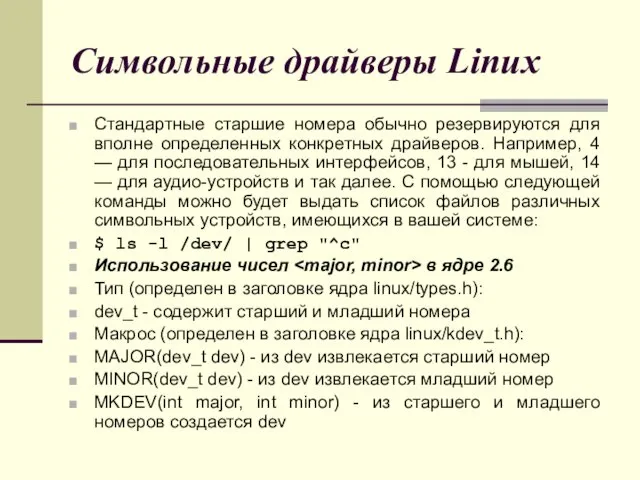
- 43. Символьные драйверы Linux Стандартные старшие номера обычно резервируются для вполне определенных конкретных драйверов. Например, 4 —
- 44. Символьные драйверы Linux Подключение файла устройства к драйверу устройства осуществляется за два шага: Выполняется регистрация файлов
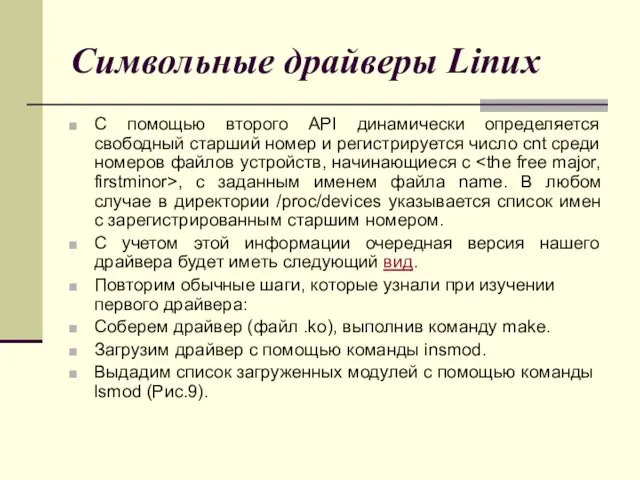
- 45. Символьные драйверы Linux С помощью второго API динамически определяется свободный старший номер и регистрируется число cnt
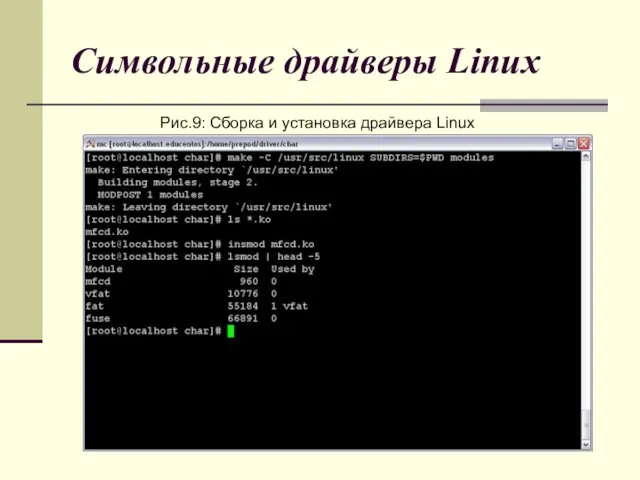
- 46. Символьные драйверы Linux Рис.9: Сборка и установка драйвера Linux
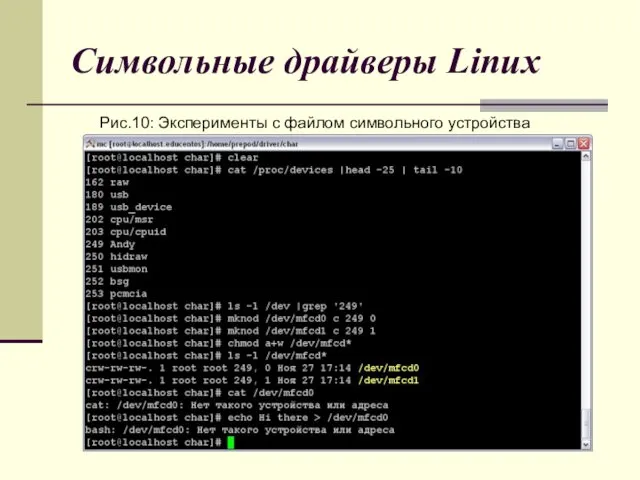
- 47. Символьные драйверы Linux Перед выгрузкой драйвера с помощью команды rmmod заглянем в директорий /proc/devices для того,
- 48. Символьные драйверы Linux Рис.10: Эксперименты с файлом символьного устройства
- 49. Файлы символьных устройств Даже при регистрации диапазона устройств , файлы устройств в директории /dev не создаются
- 50. Файлы символьных устройств Исходя из этого принципа, теперь для рассматриваемого устройства в ядре в /sys только
- 51. Файлы символьных устройств struct class *cl = class_create(THIS_MODULE, " "); Затем в этот класс информация об
- 52. Файлы символьных устройств Например, вызов функции device_create() в цикле с использованием индекса i будет иметь следующий
- 53. Файлы символьных устройств Теперь, чтобы VFS передала операции над файлом устройства в драйвер, ее следует об
- 54. Файлы символьных устройств Теперь, чтобы VFS передала операции над файлом устройства в драйвер, ее следует об
- 55. Файлы символьных устройств Итак, для начала, давайте все это сделаем как можно проще - скажем, максимально
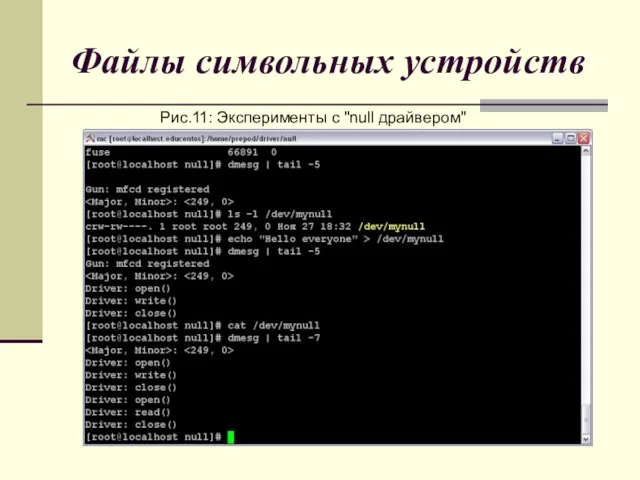
- 56. Файлы символьных устройств Рис.11: Эксперименты с "null драйвером"
- 57. Файлы символьных устройств В своем драйвере мы использовали свои собственные вызовы (my_open, my_close, my_read, my_write), но
- 58. Файлы символьных устройств Для операции чтения, оно будет указывать количество читаемых байтов, а для операции записи,
- 59. Файлы символьных устройств В нашем примере null-драйвера мы возвратили ноль - это означает, что доступных байтов
- 60. Файлы символьных устройств Нет, это не опечатка - в операции чтения писатели драйверов устройств "записывают" данные
- 61. Файлы символьных устройств Изменим my_read() и my_write() следующим образом, добавив статический глобальный символьный массив. Так как
- 63. Скачать презентацию
Общие понятия
Строго говоря, драйвером считается фрагмент кода операционной системы, который позволяет
Общие понятия
Строго говоря, драйвером считается фрагмент кода операционной системы, который позволяет
Общие понятия
Касаясь характерных черт драйвера (работающего с полномочиями компонента ядра) для
Общие понятия
Касаясь характерных черт драйвера (работающего с полномочиями компонента ядра) для
Общие понятия
В директории /dev/ можно открыть файл, соответствующий мышке и считывать
Общие понятия
В директории /dev/ можно открыть файл, соответствующий мышке и считывать
Общие понятия
Наблюдение 2. Драйверы стали легко заменяемой запасной частью в операционной
Общие понятия
Наблюдение 2. Драйверы стали легко заменяемой запасной частью в операционной
Общие понятия
Наблюдение 3. Концепция существования режима ядра (с большими функциональными возможностями
Общие понятия
Наблюдение 3. Концепция существования режима ядра (с большими функциональными возможностями
Общие понятия
Итак, драйвер управляет, контролирует, следит за работой объекта, который подчиняется
Общие понятия
Итак, драйвер управляет, контролирует, следит за работой объекта, который подчиняется
Общие понятия
К числу примеров контроллеров устройств относятся контроллеры жестких дисков, контроллеры
Общие понятия
К числу примеров контроллеров устройств относятся контроллеры жестких дисков, контроллеры
Общие понятия
Рис.1: Взаимодействие устройств и драйверов
Общие понятия
Рис.1: Взаимодействие устройств и драйверов
Общие понятия
Ответ на этот вопрос не так уж сложен — разве
Общие понятия
Ответ на этот вопрос не так уж сложен — разве
Общие понятия
Короче говоря, драйвер устройства состоит из двух частей, одна из
Общие понятия
Короче говоря, драйвер устройства состоит из двух частей, одна из
Общие понятия
Рис.2: Отдельные части драйвера Linux
Общие понятия
Рис.2: Отдельные части драйвера Linux
Общие понятия
Та часть драйвера, которая зависит от ОС, тесно взаимодействует с
Общие понятия
Та часть драйвера, которая зависит от ОС, тесно взаимодействует с
Общие понятия
Пакетно-ориентированная или сетевая вертикаль
Блочно-ориентированная вертикаль или вертикаль хранения данных
Общие понятия
Пакетно-ориентированная или сетевая вертикаль
Блочно-ориентированная вертикаль или вертикаль хранения данных
Общие понятия
Рис.3: Общая схема ядра Linux
Общие понятия
Рис.3: Общая схема ядра Linux
Общие понятия
Таковы основные функциональные возможности любой ОС, будь то микроядро или
Общие понятия
Таковы основные функциональные возможности любой ОС, будь то микроядро или
Общие понятия
а) драйверов файловых систем, предназначенных для декодирования разнообразных форматов данных
Общие понятия
а) драйверов файловых систем, предназначенных для декодирования разнообразных форматов данных
Общие понятия
Драйверы со множественными вертикалями
Последнее замечание относительно полной картины (размещения всех
Общие понятия
Драйверы со множественными вертикалями
Последнее замечание относительно полной картины (размещения всех
Динамическая загрузка драйверов
Динамически загружаемые драйвера чаще всего называют модулями, которые собираются
Динамическая загрузка драйверов
Динамически загружаемые драйвера чаще всего называют модулями, которые собираются
Динамическая загрузка драйверов
Динамическая загрузка драйверов
Динамическая загрузка драйверов
Чтобы динамически загружать и выгружать драйверы, воспользуйтесь следующими командами,
Динамическая загрузка драйверов
Чтобы динамически загружать и выгружать драйверы, воспользуйтесь следующими командами,
Динамическая загрузка драйверов
Давайте в качестве примера рассмотрим соответствующие драйвера файловой системы
Динамическая загрузка драйверов
Давайте в качестве примера рассмотрим соответствующие драйвера файловой системы
Динамическая загрузка драйверов
Рис.5: Операции с модулями Linux
Динамическая загрузка драйверов
Рис.5: Операции с модулями Linux
Динамическая загрузка драйверов
Здесь также вызывается команда dmesg (сокр. от англ. display message
Динамическая загрузка драйверов
Здесь также вызывается команда dmesg (сокр. от англ. display message
Первый драйвер для Linux
Драйвер никогда не работает сам по себе. Он
Первый драйвер для Linux
Драйвер никогда не работает сам по себе. Он
Первый драйвер для Linux
Это в драйвере две обычные функции, разве что
Первый драйвер для Linux
Это в драйвере две обычные функции, разве что
Сборка первого драйвера
Так как у нас есть код на языке C,
Сборка первого драйвера
Так как у нас есть код на языке C,
Сборка первого драйвера
Версию ядра можно определить утилитой uname –a
Найти пакет можно
Сборка первого драйвера
Версию ядра можно определить утилитой uname –a
Найти пакет можно
Сборка первого драйвера
Рис.6: Загрузка драйвера Linux
Сборка первого драйвера
Рис.6: Загрузка драйвера Linux
Журнал сообщений ядра
Команда printk не предназначена для выдачи дампа своих
Журнал сообщений ядра
Команда printk не предназначена для выдачи дампа своих
Журнал сообщений ядра
#define KERN_EMERG "<0>" /* system is unusable */
#define
Журнал сообщений ядра
#define KERN_EMERG "<0>" /* system is unusable */
#define
Журнал сообщений ядра
Таким образом, все данные, выдаваемые командой printk, по
Журнал сообщений ядра
Таким образом, все данные, выдаваемые командой printk, по
Журнал сообщений ядра
Рис.7: Журналирование сообщений ядра
Журнал сообщений ядра
Рис.7: Журналирование сообщений ядра
Язык С ядра — чистый С
Для любой функции ядра требуется обработка
Язык С ядра — чистый С
Для любой функции ядра требуется обработка
Язык С ядра — чистый С
Стандартный язык С является только языком
Язык С ядра — чистый С
Стандартный язык С является только языком
Символьные драйверы Linux
Нереально за несколько лекций пересказать книгу "Драйверы устройств Linux"
Символьные драйверы Linux
Нереально за несколько лекций пересказать книгу "Драйверы устройств Linux"
Символьные драйверы Linux
Возьмем, к примеру, драйверы последовательного порта, аудио драйверы, и
Символьные драйверы Linux
Возьмем, к примеру, драйверы последовательного порта, аудио драйверы, и
Символьные драйверы Linux
Рис.8: Общий взгляд на символьный драйвер
Символьные драйверы Linux
Рис.8: Общий взгляд на символьный драйвер
Символьные драйверы Linux
Это означает, что приложение выполняет обычные файловые операции с
Символьные драйверы Linux
Это означает, что приложение выполняет обычные файловые операции с
Символьные драйверы Linux
Помните, что это обычное явление для файлов устройств. Давайте
Символьные драйверы Linux
Помните, что это обычное явление для файлов устройств. Давайте
Символьные драйверы Linux
Приложение подключается к файлу устройства при помощи системного вызова
Символьные драйверы Linux
Приложение подключается к файлу устройства при помощи системного вызова
Символьные драйверы Linux
В результате приложение пользовательского пространства может использовать для файла
Символьные драйверы Linux
В результате приложение пользовательского пространства может использовать для файла
Символьные драйверы Linux
Стандартные старшие номера обычно резервируются для вполне определенных конкретных
Символьные драйверы Linux
Стандартные старшие номера обычно резервируются для вполне определенных конкретных

Символьные драйверы Linux
Подключение файла устройства к драйверу устройства осуществляется за два
Символьные драйверы Linux
Подключение файла устройства к драйверу устройства осуществляется за два
Символьные драйверы Linux
С помощью второго API динамически определяется свободный старший номер
Символьные драйверы Linux
С помощью второго API динамически определяется свободный старший номер
Символьные драйверы Linux
Рис.9: Сборка и установка драйвера Linux
Символьные драйверы Linux
Рис.9: Сборка и установка драйвера Linux
Символьные драйверы Linux
Перед выгрузкой драйвера с помощью команды rmmod заглянем в
Символьные драйверы Linux
Перед выгрузкой драйвера с помощью команды rmmod заглянем в
Символьные драйверы Linux
Рис.10: Эксперименты с файлом символьного устройства
Символьные драйверы Linux
Рис.10: Эксперименты с файлом символьного устройства
Файлы символьных устройств
Даже при регистрации диапазона устройств , файлы
Файлы символьных устройств
Даже при регистрации диапазона устройств
Файлы символьных устройств
Исходя из этого принципа, теперь для рассматриваемого устройства
Файлы символьных устройств
Исходя из этого принципа, теперь для рассматриваемого устройства
Файлы символьных устройств
struct class *cl = class_create(THIS_MODULE, "");
Файлы символьных устройств
struct class *cl = class_create(THIS_MODULE, "
Файлы символьных устройств
Например, вызов функции device_create() в цикле с использованием
Файлы символьных устройств
Например, вызов функции device_create() в цикле с использованием
Файлы символьных устройств
Теперь, чтобы VFS передала операции над файлом устройства
Файлы символьных устройств
Теперь, чтобы VFS передала операции над файлом устройства
Файлы символьных устройств
Теперь, чтобы VFS передала операции над файлом устройства
Файлы символьных устройств
Теперь, чтобы VFS передала операции над файлом устройства
Файлы символьных устройств
Итак, для начала, давайте все это сделаем как
Файлы символьных устройств
Итак, для начала, давайте все это сделаем как
Файлы символьных устройств
Рис.11: Эксперименты с "null драйвером"
Файлы символьных устройств
Рис.11: Эксперименты с "null драйвером"
Файлы символьных устройств
В своем драйвере мы использовали свои собственные вызовы
Файлы символьных устройств
В своем драйвере мы использовали свои собственные вызовы
Файлы символьных устройств
Для операции чтения, оно будет указывать количество читаемых
Файлы символьных устройств
Для операции чтения, оно будет указывать количество читаемых
Файлы символьных устройств
В нашем примере null-драйвера мы возвратили ноль -
Файлы символьных устройств
В нашем примере null-драйвера мы возвратили ноль -
Файлы символьных устройств
Нет, это не опечатка - в операции чтения
Файлы символьных устройств
Нет, это не опечатка - в операции чтения
Файлы символьных устройств
Изменим my_read() и my_write() следующим образом, добавив статический
Файлы символьных устройств
Изменим my_read() и my_write() следующим образом, добавив статический
 Основні визначення мови С++
Основні визначення мови С++ Урок-игра по информатике В гостях у Смешариков. Диск
Урок-игра по информатике В гостях у Смешариков. Диск Информационное обеспечение экономических информационных систем и технологий
Информационное обеспечение экономических информационных систем и технологий Теория формальных языков и трансляций. LR(k )-грамматики и трансляции
Теория формальных языков и трансляций. LR(k )-грамматики и трансляции Компьютерные презентации
Компьютерные презентации Виртуальный помощник. Обработка информации в электронных таблицах
Виртуальный помощник. Обработка информации в электронных таблицах Персональный компьютер
Персональный компьютер Алгоритмическая конструкция следование и ветвление
Алгоритмическая конструкция следование и ветвление Escalus
Escalus Facebook vs Journalism
Facebook vs Journalism Определение количества информации
Определение количества информации Функциональное тестирование
Функциональное тестирование Сложение, вычитание, умножение в двоичной системе счисления
Сложение, вычитание, умножение в двоичной системе счисления Представление опыта работы по теме: Использование групповых форм работы на уроке информатики
Представление опыта работы по теме: Использование групповых форм работы на уроке информатики Розробка гри Служба доставки
Розробка гри Служба доставки Разработка проекта локальной сети для ИП Караваева сервисного центра Сигма
Разработка проекта локальной сети для ИП Караваева сервисного центра Сигма Информационные и коммуникационные технологии в журналистике
Информационные и коммуникационные технологии в журналистике Урок в 6 классе по теме: Создание новогоднего поздравления - открытки в текстовом процессоре Word.
Урок в 6 классе по теме: Создание новогоднего поздравления - открытки в текстовом процессоре Word. Элементы алгебры логики. Математические основы информатики (8 класс)
Элементы алгебры логики. Математические основы информатики (8 класс) Основные структурные элементы информационных систем. (Лекция 2)
Основные структурные элементы информационных систем. (Лекция 2) Универсальный программный комплекс “Диплом и приложение к нему”
Универсальный программный комплекс “Диплом и приложение к нему” Поняття комп'ютерної публікації. Засоби створення публікації
Поняття комп'ютерної публікації. Засоби створення публікації New CCC user guide 2017.5. Overseas Service Planning Team
New CCC user guide 2017.5. Overseas Service Planning Team Java. Основы Java. Лекция 2
Java. Основы Java. Лекция 2 Обзор пройденного материала по информатике
Обзор пройденного материала по информатике Компьютерные сети
Компьютерные сети Анимация В Power point
Анимация В Power point Развивающая игра Прочитай по первым буквам. Часть 3 Слова из 5 букв
Развивающая игра Прочитай по первым буквам. Часть 3 Слова из 5 букв