- Формализация при автоматизированном проектировании электронных средств. Лекция 1

Содержание
- 2. Лекция 1 Формализация при автоматизированном проектировании электронных средств 1 Комплексная автоматизация проектирования, производства и эксплуатации ЭС
- 3. Вопрос 1 Комплексная автоматизация проектирования, производства и эксплуатации ЭА
- 5. Эффективность внедрения CALS- технологий
- 6. Эффективность применения ИТАП
- 7. Преимущества применения САПЭС Уменьшение времени цикла за счет изменения процессов Высвобождение дополнительного времени на предварительное проектирование
- 8. Определение САПР Система автоматизированного проектирования (САПР) – организационно-техническая система, состоящая из комплекса средств автоматизированного проектирования, связанных
- 9. Подсистемы автоматизации труда в производстве ЭС 1.Автоматизированные системы научных исследований 2.Системы автоматизированного проектирования 3.Автоматизированные системы ТПП
- 10. Типовые операции обработки информации при производстве ЭС 1. Поиск и выбор из различных источников информации 2.
- 11. СОСТАВНЫЕ ЧАСТИ САПР (ОБЕСПЕЧЕНИЯ) 1. математическое, 2. программное, 3. лингвистическое, 4. информационное, 5. методическое, 6. организационное,
- 12. Математическое обеспечение САПР — совокупность математических методов, моделей и алгоритмов проектирования, необходимых для его выполнения Программное
- 13. Лингвистическое обеспечение САПР — совокупность языков проектирования, включая термины и определения, правила формализации естественного языка и
- 14. Методическое обеспечение САПР — комплект документов, устанавливающих состав и правила отбора и эксплуатации средств обеспечения проектирования.
- 15. Техническое обеспечение САПР — универсальные и специализированные технические средства для автоматизации процессов проектирования, изготовления и контроля.
- 16. Вопрос 2 Основы теории графов и их применение в САПЭС
- 17. Основные определения Под графом G(X, U) понимают совокупность непустого множества Х и изолированное от него подмножество
- 18. Основные определения Виды графов: 1. Неориентированные 2. Ориентированные → 3. Смешанные Граф G(X, U) называется неориентированным,
- 19. Основные определения 1) Граф, у которого 2 вершины соединены более чем одним ребром – мультиграф. 2)
- 20. Основные определения Число ребер инцидентных некоторой вершине xi называется степенью вершины. Граф, состоящий только из изолированных
- 21. Основные определения Граф называется однородным степени t, если степень всех его вершин = t. Граф, все
- 22. Основные определения Граф, в котором перемещаясь по ребрам из вершины в вершину можно попасть в каждую
- 23. Основные определения Циклом называется последовательность ребер, при которой в результате обхода вершин графа по этим ребрам
- 24. Основные определения Цикл называют Гамильтоновым, если он проходит через каждую вершину графа только один раз. Связной
- 25. Основные определения Объект H(X, E) считается гиперграфом, если он состоит из множества вершин X и множества
- 26. Вопрос 3 Описание графов с помощью матриц
- 27. Описание графов с помощью матриц 1. Матрица смежности Если задан граф G(X, U), то ему можно
- 28. Описание графов с помощью матриц 1. Матрица смежности. Пример
- 29. Описание графов с помощью матриц 2. Матрица весовых соотношений строятся аналогично матрицам смежности, но значения их
- 30. Описание графов с помощью матриц 3. Матрица длин Это квадратная матрица (Lij – длина ребра):
- 31. Описание графов с помощью матриц 4. Матрица инцидентности Представляет собой прямоугольную матрицу. Строки матрицы соответствуют вершинам,
- 32. Описание графов с помощью матриц 4. Матрица инцидентности. Пример:
- 33. Описание графов с помощью матриц 5. Матрица смежности ребер Эта матрица, элементы которой образуются по правилу
- 34. Описание графов с помощью матриц 5. Матрица смежности ребер. Пример
- 35. Вопрос 4 Формальное описание коммутационных схем и монтажного пространства
- 36. Формальное описание коммутационных схем Любую схему можно представить как некоторое подмножество элементов XL: соединенных между собой
- 37. Формальное описание коммутационных схем Электрическую схему задают также в виде матрицы цепей: Каждый элемент схемы имеет
- 38. Формальное описание коммутационных схем Тогда любую схему можно задать в виде графа: F – определяет принадлежность
- 39. Формальное описание коммутационных схем (2 способ) Граф вида G задается обычно в виде трехмерной матрицы А,
- 40. Формальное описание коммутационных схем (Пример)
- 41. Формальное описание схем (Пример) Матрица инцидентности: Матрица цепей:
- 42. Формальное описание схем (Пример)
- 43. Модель монтажного пространства (монтажного поля) Монтажным пространством элементов конструкций называется некоторая область, ограниченная габаритами этих элементов.
- 44. Модель монтажного пространства Минимальный размер ячейки где h – ширина проводника, s – минимальное расстояние между
- 45. Модель монтажного пространства Машинный эквивалент дискретного монтажного поля - двумерный массив B (X,Y), значения каждого элемента
- 46. Модель монтажного пространства Аналогично можно поставить в соответствие каждой ячейке вершину графа, тогда модель можно описать
- 47. Вопросы по прочитанному материалу?
- 49. Скачать презентацию
 ГОСТ Р 7.0.100–2018 общие требования и правила составления
ГОСТ Р 7.0.100–2018 общие требования и правила составления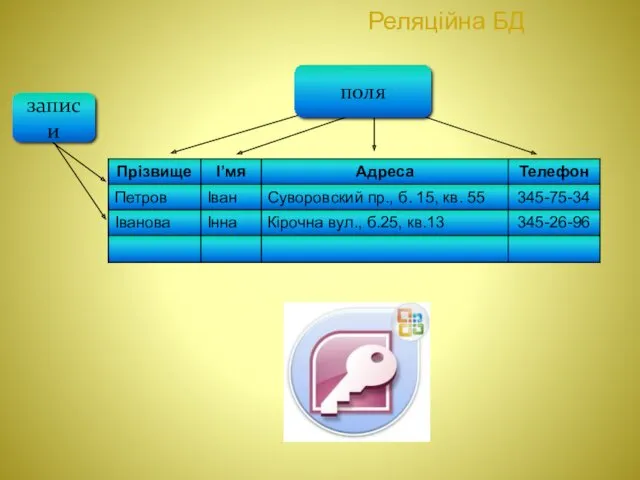 Реляційна база даних
Реляційна база даних Модели жизненного цикла информационных систем
Модели жизненного цикла информационных систем Роботы и робототехника
Роботы и робототехника Оформление информационно-справочных документов. (Лекция 3)
Оформление информационно-справочных документов. (Лекция 3) Інформаційна система готелю
Інформаційна система готелю Історія комп'ютерної техніки
Історія комп'ютерної техніки Веб-технологии: вчера, сегодня, завтра. Семинар 1. Знакомство с веб-технологиями
Веб-технологии: вчера, сегодня, завтра. Семинар 1. Знакомство с веб-технологиями Безопасный Интернет
Безопасный Интернет Выделение и описание бизнес-процессов в организации
Выделение и описание бизнес-процессов в организации Презентация к уроку Моделирование ситуации Обои и комната в среде табличного процессора. УМК Н.В.Макаровой
Презентация к уроку Моделирование ситуации Обои и комната в среде табличного процессора. УМК Н.В.Макаровой Задачи о рыцарях и лжецах
Задачи о рыцарях и лжецах Средства защиты информации в ОС Windows. (Лекция 9)
Средства защиты информации в ОС Windows. (Лекция 9) CISCO CCIE Program
CISCO CCIE Program Программное обеспечение персонального компьютера
Программное обеспечение персонального компьютера Введение в структурированный язык запросов
Введение в структурированный язык запросов Аппаратное обеспечение пк
Аппаратное обеспечение пк Лекция 5. Моделирование технологических процессов. Модель Дила-Гроува. Модель Массуда
Лекция 5. Моделирование технологических процессов. Модель Дила-Гроува. Модель Массуда Защита информации. Термины, понятия, определения. Тест
Защита информации. Термины, понятия, определения. Тест Компьютер-универсальная машина для обработки информации
Компьютер-универсальная машина для обработки информации Системы счисления
Системы счисления Компьютерные технологии в науке и образовании
Компьютерные технологии в науке и образовании Образец презентации проекта
Образец презентации проекта Влияние кибербезопасности на информационную жизнь общества
Влияние кибербезопасности на информационную жизнь общества Работа с командной строкой Windows
Работа с командной строкой Windows Аппаратное обеспечение для подключения к сети интернет
Аппаратное обеспечение для подключения к сети интернет Координатный способ кодирования
Координатный способ кодирования Интернет-технологии и распределённая обработка данных. Лекция 7
Интернет-технологии и распределённая обработка данных. Лекция 7