- Химико-технологические системы как объекты моделирования

Содержание
- 2. Формально открытую систему можно представить в виде Z(t) = F[X(t),Z(to)] (1) Y(t) = G [X(t),Z(t)] (2)
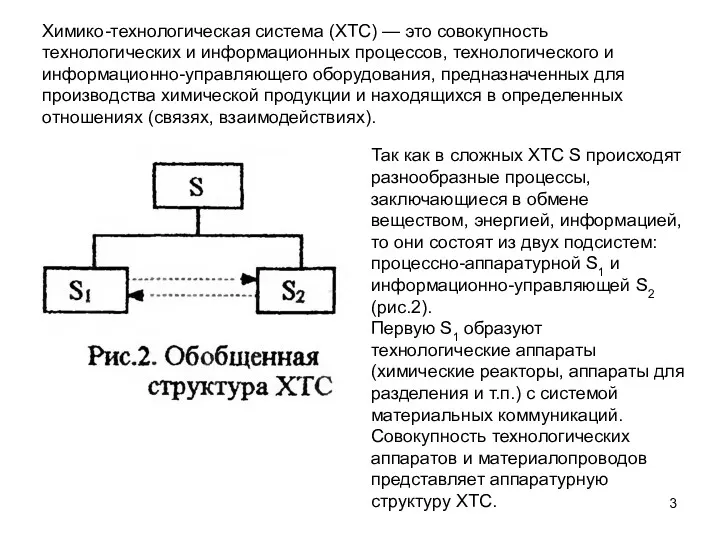
- 3. Химико-технологическая система (ХТС) — это совокупность технологических и информационных процессов, технологического и информационно-управляющего оборудования, предназначенных для
- 4. Вторая S2 представлена процессами обмена информацией и информацинно-управляющим оборудованием (измерительными устройствами, преобразователями информации, управляющими машинами и
- 5. Любая ХТС обладает практически бесконечным числом свойств. ХТС задается набором своих свойств и назначением каждому из
- 6. Переменная (англ. variable) — это операционное представление свойства. Каждая переменная имеет имя (идентификатор), которым она отличается
- 7. Следствием целенаправленности является принцип выбора, так как процедура выбора выделяет из множества возможных способов функционирования систем
- 8. Расстоянием d для множества Vi называется функция вода где R — множество действительных чисел. Функция d
- 9. Обобщенное дифференциальное уравнение переноса, описывающее в общем виде закон сохранения некоторого свойства Г, имеет вид: где
- 10. 1.2. Классификация систем Классификация — это объединение множества объектов в группы (классы, кластеры) по признакам их
- 11. Наконец, при измерении признаков в количественной (метрической) шкале можно не только упорядочить значения признаков, но и
- 12. По типу X,Y,Z различают системы в которых X, Y, Z могут, принимать либо конечное, либо бесконечное
- 13. Система может содержать элементы, как с сосредоточенными параметрами, так и с распределенными. В системах с сосредоточенными
- 15. Признаками непрерывного процесса являются стационарность объекта в основных рабочих режимах, совмещенность во времени основного технологического процесса
- 16. Если все аппараты в ХТС работают в непрерывном режиме, то будем называть такую систему системой непрерывного
- 17. Это различие событий имеет принципиальное значение при моделировании систем, так как моменты наступления событии времени априори
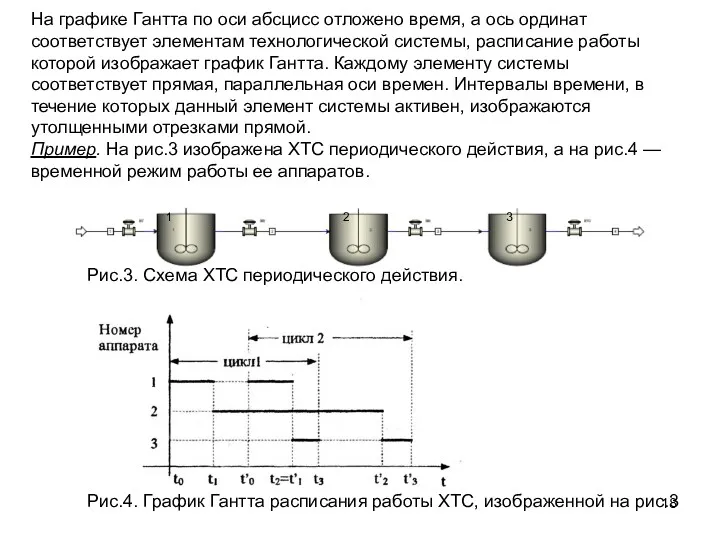
- 18. На графике Гантта по оси абсцисс отложено время, а ось ординат соответствует элементам технологической системы, расписание
- 19. На графике Гантта (рис.4) изображены два последовательных цикла работы ХТС (первый цикл [t0, t3], второй —
- 20. Например, два автономных процесса в различных не взаимодействующих между собой аппаратах периодического действия могут быть параллельными,
- 21. Важным классификационным признаком является тип структуры системы. Для систем непрерывного действия важно различать системы разомкнутые и
- 22. 1.3. Методологические отличия систем В основе организации, порядка, имеющего место в любом объекте, называемом системой, лежат
- 23. недостаточной информированностью о факторах, влияющих на систему, но, возможно, имеющих детерминированный характер (такие системы будем называть
- 24. Из различных нечетких мер наиболее хорошо разработаны вероятностные меры (в курсах теории вероятности) и возможностные меры
- 25. где Х∈ | С |, р(Х) — функция распределения вероятностей. Представим реактор периодического действия, на вход
- 26. Предположим, что продолжительность технологического процесса в реакторе периодического действия есть фиксированная величина, но по некоторым причинам
- 27. 2.1. Принцип моделируемости Принципиально возможны два различных способа изучения объектов: непосредственно (в результате натурного эксперимента) и
- 28. Пример. Изучаемый объект — изотермический химический реактор периодического действия, в котором протекают консекутивные (последовательные) реакции Цель
- 29. Пусть имеются две системы S1={X1,R1}, S2={X2,R2}, где X — множество элементов, R — характеристическое множество (множество
- 30. Отношение гомоморфизма несимметрично. С учетом вышеизложенного можно определить формально процесс моделирования. Пусть имеется подлежащая изучению система
- 31. Природа едина и цельна, но отражение ее свойств в нашем представлении неоднозначно и ситуационно. Наблюдатель воспринимает
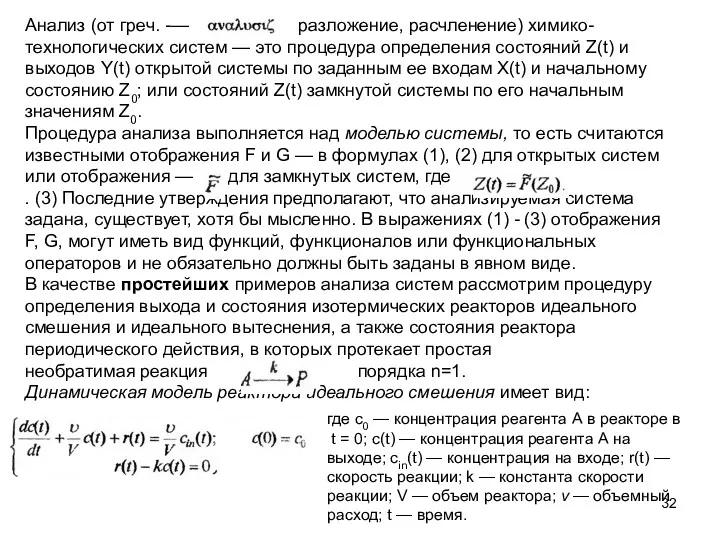
- 32. Анализ (от греч. -— разложение, расчленение) химико-технологических систем — это процедура определения состояний Z(t) и выходов
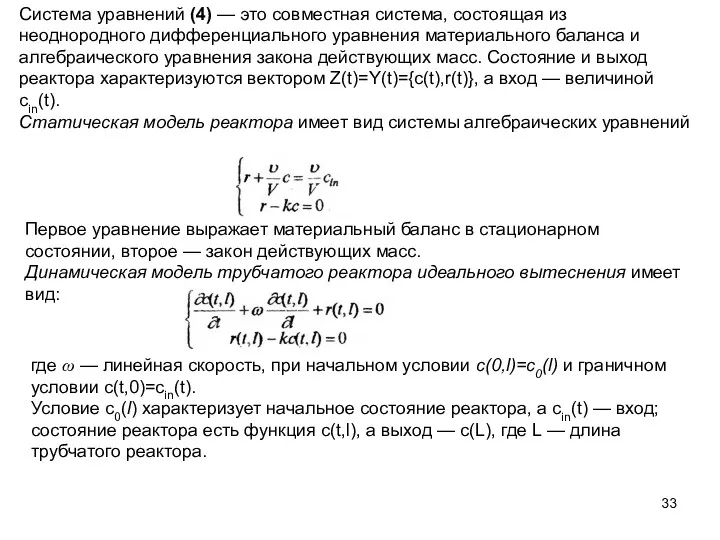
- 33. Система уравнений (4) — это совместная система, состоящая из неоднородного дифференциального уравнения материального баланса и алгебраического
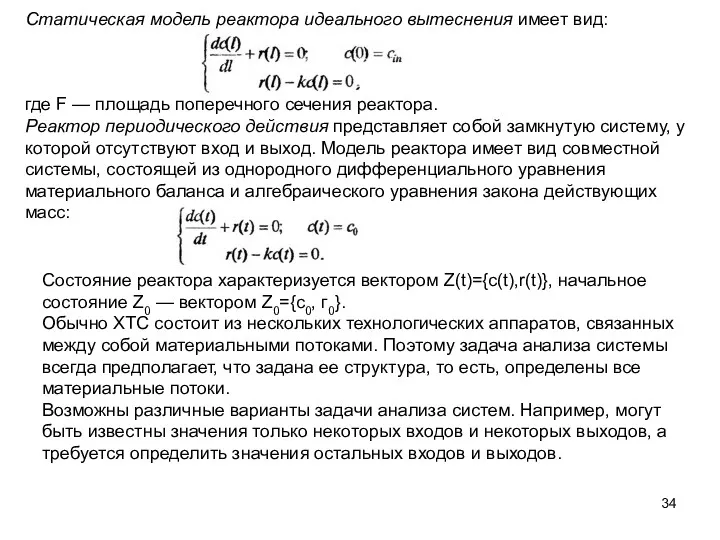
- 34. Статическая модель реактора идеального вытеснения имеет вид: где F — площадь поперечного сечения реактора. Реактор периодического
- 35. Процедурой, обратной анализу, является синтез. Синтез (от греч. — соединение, сочетание, составление) ХТС — это процедура
- 36. Среди различных способов функционирования может существовать наилучший, поэтому возможна задача оптимизации, состоящая в выборе этого наилучшего
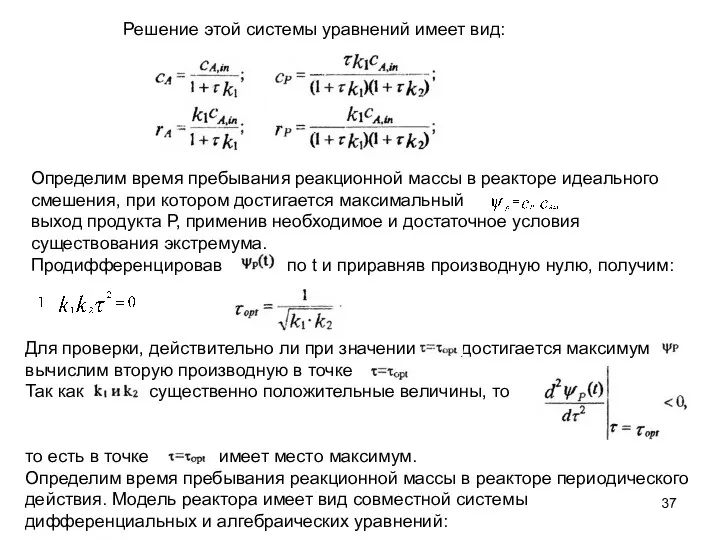
- 37. Решение этой системы уравнений имеет вид: Определим время пребывания реакционной массы в реакторе идеального смешения, при
- 38. Разрешив подсистему алгебраических уравнений относительно переменных и подставив полученные решения в подсистему дифференциальных уравнений, получим задачу
- 39. В отличие от оптимизации по единственному критерию в результате многокритериальной оптимизации обычно находят область неулучшаемых решений,
- 40. Наблюдаемость зависит от входа X(t). Наблюдаемость называется полной, если по выходу Y[t0,t1], где t0 Под реконструкцией
- 41. Проблема устойчивости заключается в ответе на вопрос, будет ли система выполнять свои функции при возникновении возмущений.
- 46. Скачать презентацию
![Формально открытую систему можно представить в виде Z(t) = F[X(t),Z(to)]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/178732/slide-1.jpg)
Формально открытую систему можно представить в виде
Z(t) = F[X(t),Z(to)] (1)
Y(t)
Формально открытую систему можно представить в виде
Z(t) = F[X(t),Z(to)] (1)
Y(t)
Химико-технологическая система (ХТС) — это совокупность технологических и информационных процессов, технологического
Химико-технологическая система (ХТС) — это совокупность технологических и информационных процессов, технологического
Вторая S2 представлена процессами обмена информацией и информацинно-управляющим оборудованием (измерительными устройствами,
Вторая S2 представлена процессами обмена информацией и информацинно-управляющим оборудованием (измерительными устройствами,
Любая ХТС обладает практически бесконечным числом свойств.
ХТС задается набором своих
Любая ХТС обладает практически бесконечным числом свойств.
ХТС задается набором своих
Переменная (англ. variable) — это операционное представление свойства. Каждая переменная имеет
Переменная (англ. variable) — это операционное представление свойства. Каждая переменная имеет
Следствием целенаправленности является принцип выбора, так как процедура выбора выделяет из
Следствием целенаправленности является принцип выбора, так как процедура выбора выделяет из
Расстоянием d для множества Vi называется функция вода
где R — множество
Расстоянием d для множества Vi называется функция вода
где R — множество
Обобщенное дифференциальное уравнение переноса, описывающее в общем виде закон сохранения некоторого
Обобщенное дифференциальное уравнение переноса, описывающее в общем виде закон сохранения некоторого
1.2. Классификация систем
Классификация — это объединение множества объектов в группы (классы,
1.2. Классификация систем
Классификация — это объединение множества объектов в группы (классы,
Наконец, при измерении признаков в количественной (метрической) шкале можно не только
Наконец, при измерении признаков в количественной (метрической) шкале можно не только
По типу X,Y,Z различают системы в которых X, Y, Z могут,
По типу X,Y,Z различают системы в которых X, Y, Z могут,
Система может содержать элементы, как с сосредоточенными параметрами, так и с
Система может содержать элементы, как с сосредоточенными параметрами, так и с

Признаками непрерывного процесса являются стационарность объекта в основных рабочих режимах, совмещенность
Признаками непрерывного процесса являются стационарность объекта в основных рабочих режимах, совмещенность
Если все аппараты в ХТС работают в непрерывном режиме, то будем
Если все аппараты в ХТС работают в непрерывном режиме, то будем
Это различие событий имеет принципиальное значение при моделировании систем, так как
Это различие событий имеет принципиальное значение при моделировании систем, так как
На графике Гантта по оси абсцисс отложено время, а ось ординат
На графике Гантта по оси абсцисс отложено время, а ось ординат
На графике Гантта (рис.4) изображены два последовательных цикла работы ХТС (первый
На графике Гантта (рис.4) изображены два последовательных цикла работы ХТС (первый
Например, два автономных процесса в различных не взаимодействующих между собой аппаратах
Например, два автономных процесса в различных не взаимодействующих между собой аппаратах
Важным классификационным признаком является тип структуры системы. Для систем непрерывного действия
Важным классификационным признаком является тип структуры системы. Для систем непрерывного действия
1.3. Методологические отличия систем
В основе организации, порядка, имеющего место в любом
1.3. Методологические отличия систем
В основе организации, порядка, имеющего место в любом
недостаточной информированностью о факторах, влияющих на систему, но, возможно, имеющих детерминированный
недостаточной информированностью о факторах, влияющих на систему, но, возможно, имеющих детерминированный
Из различных нечетких мер наиболее хорошо разработаны вероятностные меры (в курсах
Из различных нечетких мер наиболее хорошо разработаны вероятностные меры (в курсах
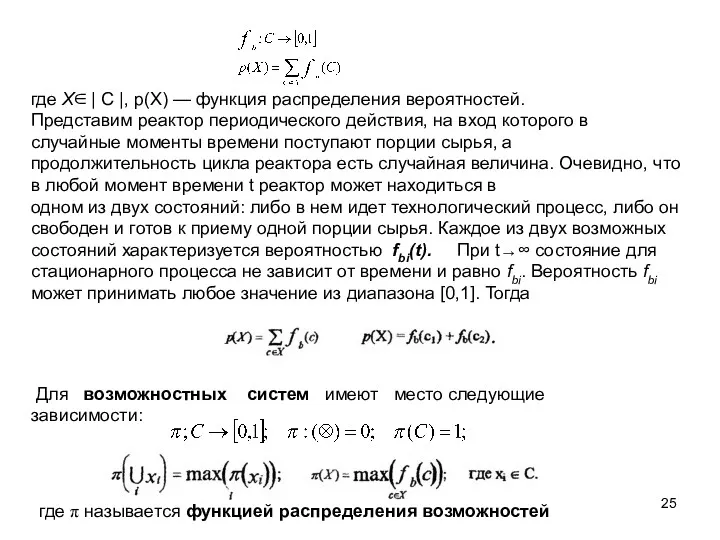
где Х∈ | С |, р(Х) — функция распределения вероятностей.
Представим реактор
где Х∈ | С |, р(Х) — функция распределения вероятностей.
Представим реактор
Предположим, что продолжительность технологического процесса в реакторе периодического действия есть фиксированная
Предположим, что продолжительность технологического процесса в реакторе периодического действия есть фиксированная
2.1. Принцип моделируемости
Принципиально возможны два различных способа изучения объектов: непосредственно (в
2.1. Принцип моделируемости
Принципиально возможны два различных способа изучения объектов: непосредственно (в
Пример. Изучаемый объект — изотермический химический реактор периодического действия, в котором
Пример. Изучаемый объект — изотермический химический реактор периодического действия, в котором
Пусть имеются две системы S1={X1,R1}, S2={X2,R2}, где X — множество элементов,
Пусть имеются две системы S1={X1,R1}, S2={X2,R2}, где X — множество элементов,
Отношение гомоморфизма несимметрично.
С учетом вышеизложенного можно определить формально процесс моделирования. Пусть
Отношение гомоморфизма несимметрично.
С учетом вышеизложенного можно определить формально процесс моделирования. Пусть
Природа едина и цельна, но отражение ее свойств в нашем представлении
Природа едина и цельна, но отражение ее свойств в нашем представлении
Анализ (от греч. -— разложение, расчленение) химико-технологических систем — это процедура
Анализ (от греч. -— разложение, расчленение) химико-технологических систем — это процедура
Система уравнений (4) — это совместная система, состоящая из неоднородного дифференциального
Система уравнений (4) — это совместная система, состоящая из неоднородного дифференциального
Статическая модель реактора идеального вытеснения имеет вид:
где F — площадь поперечного
Статическая модель реактора идеального вытеснения имеет вид:
где F — площадь поперечного
Процедурой, обратной анализу, является синтез. Синтез (от греч. — соединение, сочетание,
Процедурой, обратной анализу, является синтез. Синтез (от греч. — соединение, сочетание,
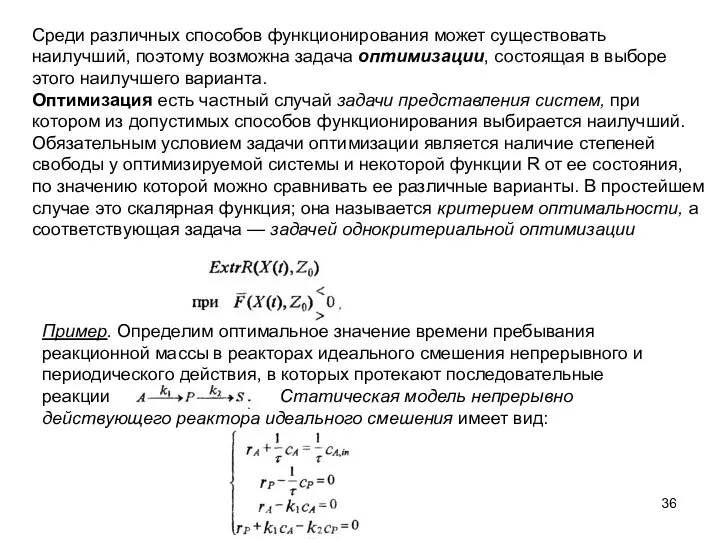
Среди различных способов функционирования может существовать наилучший, поэтому возможна задача оптимизации,
Среди различных способов функционирования может существовать наилучший, поэтому возможна задача оптимизации,
Решение этой системы уравнений имеет вид:
Определим время пребывания реакционной массы в
Решение этой системы уравнений имеет вид:
Определим время пребывания реакционной массы в
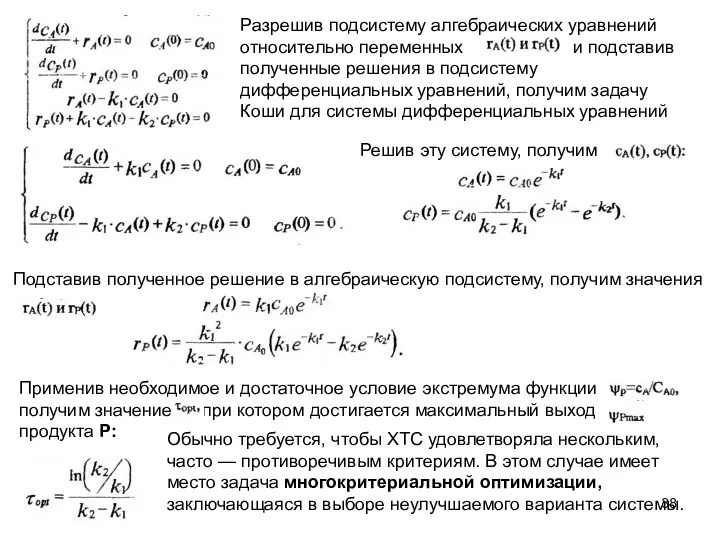
Разрешив подсистему алгебраических уравнений относительно переменных и подставив полученные решения в
Разрешив подсистему алгебраических уравнений относительно переменных и подставив полученные решения в
В отличие от оптимизации по единственному критерию в результате многокритериальной оптимизации
В отличие от оптимизации по единственному критерию в результате многокритериальной оптимизации
Наблюдаемость зависит от входа X(t). Наблюдаемость называется полной, если по выходу
Наблюдаемость зависит от входа X(t). Наблюдаемость называется полной, если по выходу
Проблема устойчивости заключается в ответе на вопрос, будет ли система выполнять
Проблема устойчивости заключается в ответе на вопрос, будет ли система выполнять


 Схід сонця (анімація)
Схід сонця (анімація) Работа с XML-данными
Работа с XML-данными Компьютерная мышь
Компьютерная мышь Строковый тип данных
Строковый тип данных Брейн ринг по информатике
Брейн ринг по информатике Сетевая операционная система. Конфигурирование и тестирование сети
Сетевая операционная система. Конфигурирование и тестирование сети Solaris - операционная система для архитектуры SPARC
Solaris - операционная система для архитектуры SPARC Центральный процессор
Центральный процессор Ата-аналарға арналған нұсқаулық
Ата-аналарға арналған нұсқаулық Кружок по искусственному интеллекту
Кружок по искусственному интеллекту Інформаційні системи та технології
Інформаційні системи та технології Библиографическая запись. Библиографическое описание
Библиографическая запись. Библиографическое описание Информатика. Этимология и значение слова
Информатика. Этимология и значение слова Составление и отладка линейных программ
Составление и отладка линейных программ Обзор креативных форм работы в библиотеках России
Обзор креативных форм работы в библиотеках России История развития вычислительной техники
История развития вычислительной техники Тема 2.7 Принципы проектирования пользовательского интерфейса
Тема 2.7 Принципы проектирования пользовательского интерфейса Создание зубчатых передач на Компас 3D
Создание зубчатых передач на Компас 3D Текстовый процессор MS Word
Текстовый процессор MS Word Работа с электронными таблицами в программе Microsoft Excel
Работа с электронными таблицами в программе Microsoft Excel Информатика. Лабораторные работы
Информатика. Лабораторные работы Разработка информационной системы для складского учета
Разработка информационной системы для складского учета Обзор PL/SQL
Обзор PL/SQL Презентация Марийская литература
Презентация Марийская литература Информационная безопасность
Информационная безопасность Переменные в Scratch
Переменные в Scratch Подходы к понятию информации и измерению информации. Информационные объекты различных видов
Подходы к понятию информации и измерению информации. Информационные объекты различных видов Разработка интерактивной презентации
Разработка интерактивной презентации