- Лекция 3. Координатный метод

Содержание
- 2. Координатный метод Координатный метод был введен в XVII веке французскими математиками Р.Декартом и П.Ферма каждая точка
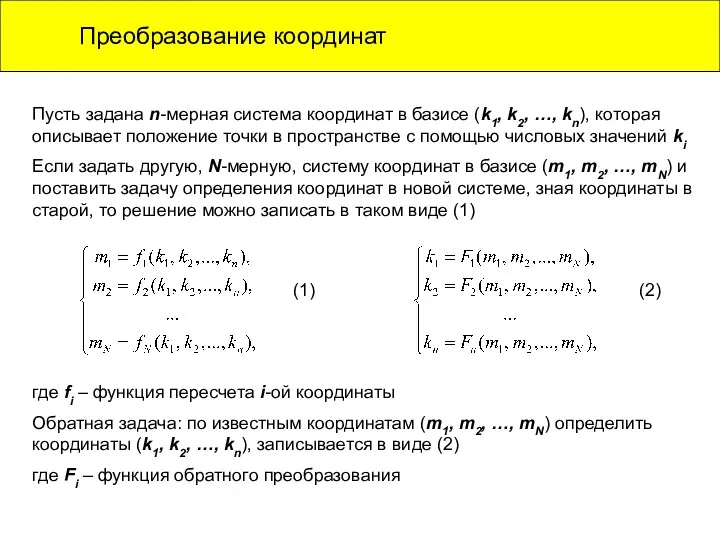
- 3. Преобразование координат Пусть задана n-мерная система координат в базисе (k1, k2, …, kn), которая описывает положение
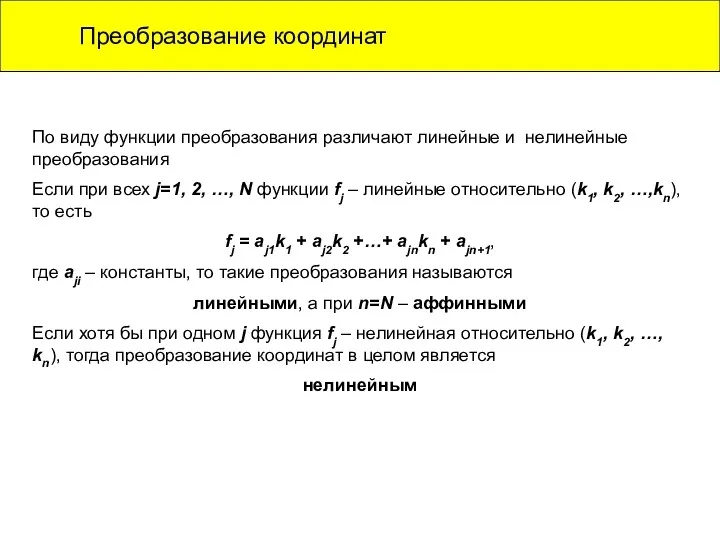
- 4. Преобразование координат По виду функции преобразования различают линейные и нелинейные преобразования Если при всех j=1, 2,
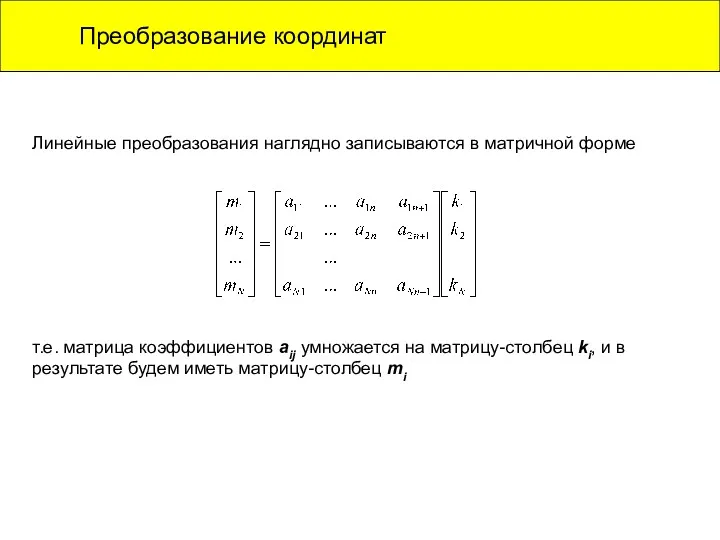
- 5. Преобразование координат Линейные преобразования наглядно записываются в матричной форме т.е. матрица коэффициентов aij умножается на матрицу-столбец
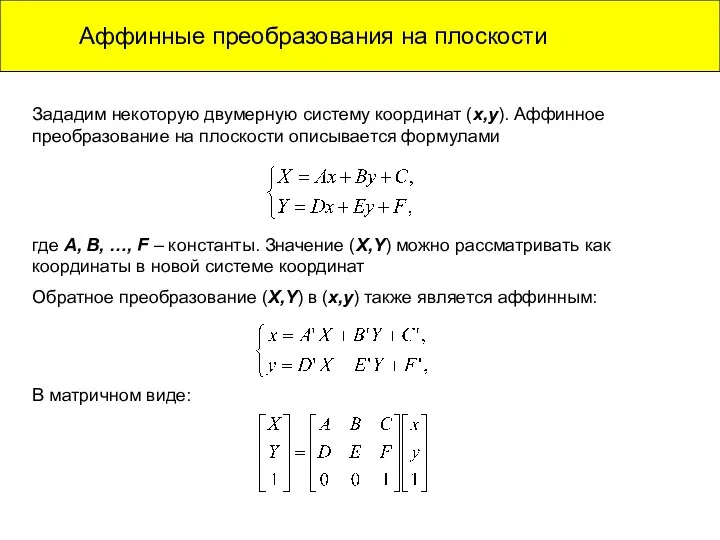
- 6. Аффинные преобразования на плоскости Зададим некоторую двумерную систему координат (x,y). Аффинное преобразование на плоскости описывается формулами
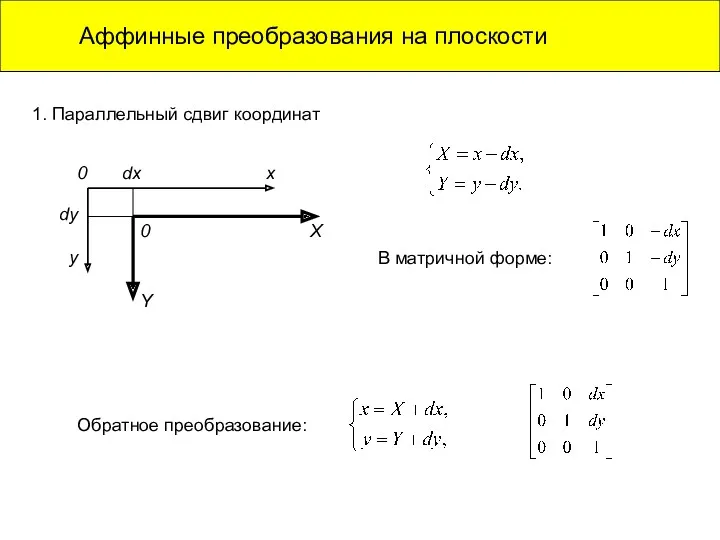
- 7. Аффинные преобразования на плоскости 1. Параллельный сдвиг координат 0 dx x dy y 0 X Y
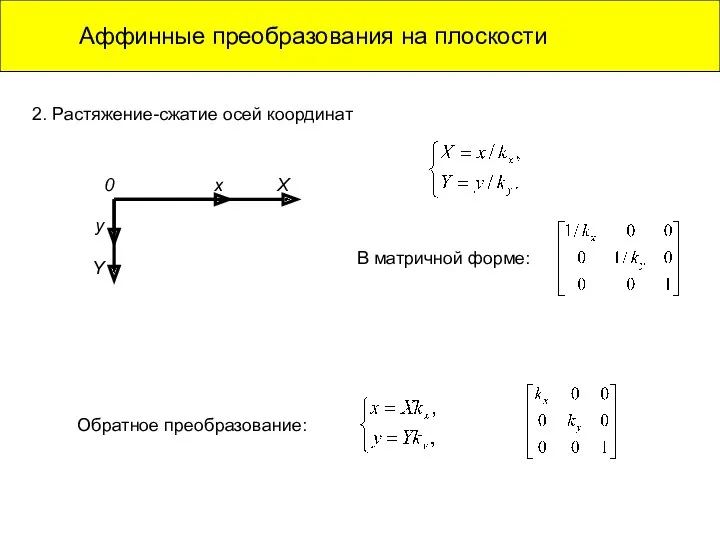
- 8. Аффинные преобразования на плоскости 2. Растяжение-сжатие осей координат 0 x X y Y В матричной форме:
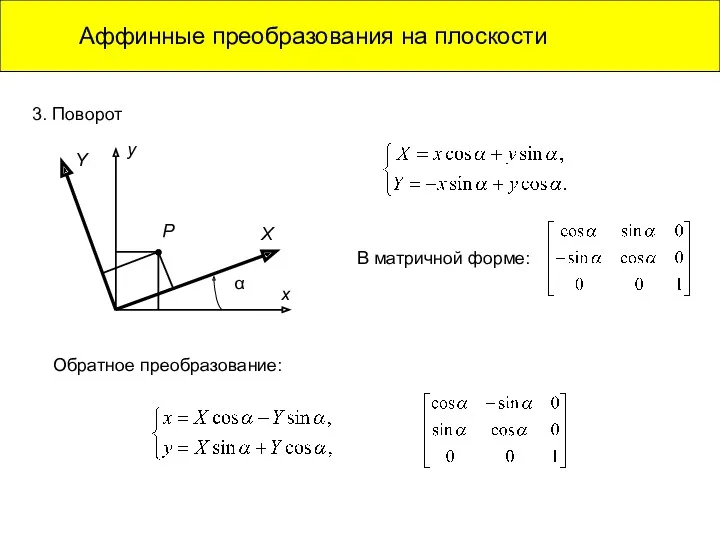
- 9. Аффинные преобразования на плоскости 3. Поворот В матричной форме: Обратное преобразование: y Y X x P
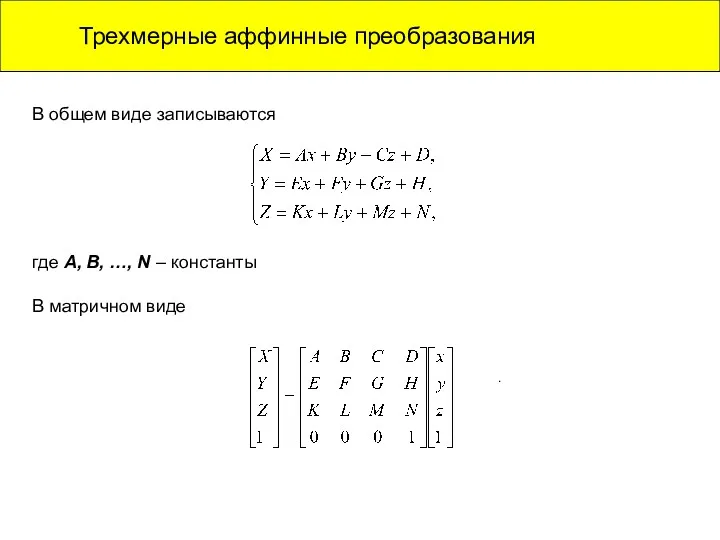
- 10. Трехмерные аффинные преобразования В общем виде записываются где A, B, …, N – константы В матричном
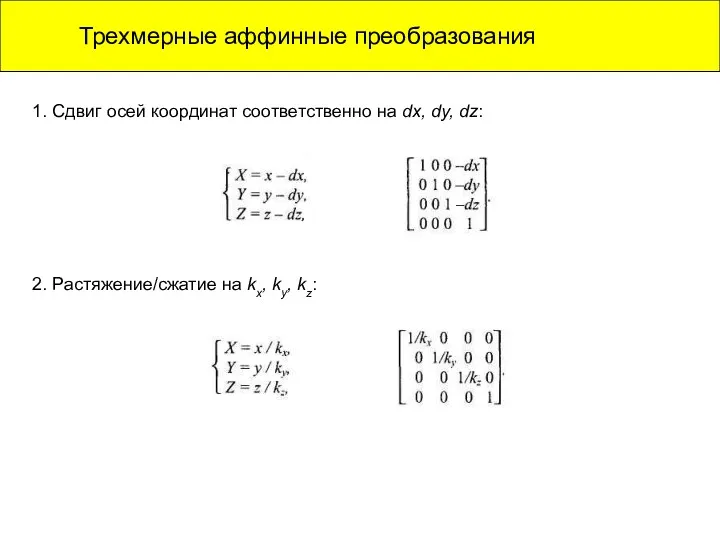
- 11. Трехмерные аффинные преобразования . 1. Сдвиг осей координат соответственно на dx, dy, dz: 2. Растяжение/сжатие на
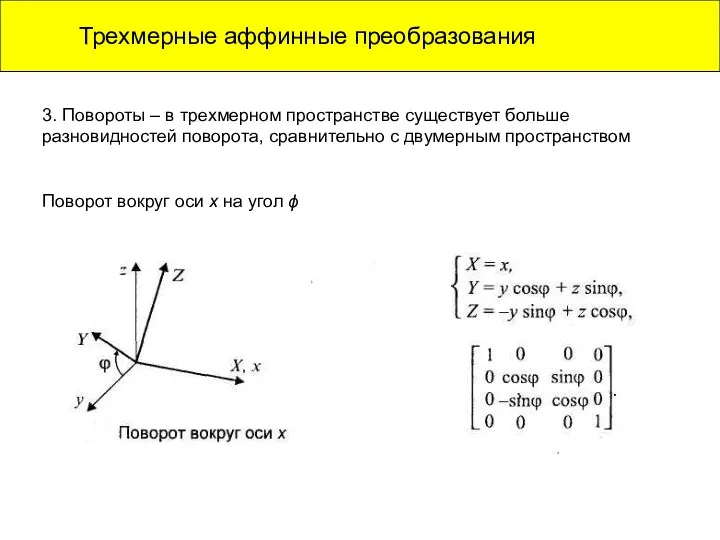
- 12. Трехмерные аффинные преобразования . 3. Повороты – в трехмерном пространстве существует больше разновидностей поворота, сравнительно с
- 14. Скачать презентацию
Координатный метод
Координатный метод был введен в XVII веке французскими математиками Р.Декартом
Координатный метод
Координатный метод был введен в XVII веке французскими математиками Р.Декартом
Преобразование координат
Пусть задана n-мерная система координат в базисе (k1, k2, …,
Преобразование координат
Пусть задана n-мерная система координат в базисе (k1, k2, …,
Преобразование координат
По виду функции преобразования различают линейные и нелинейные преобразования
Если при
Преобразование координат
По виду функции преобразования различают линейные и нелинейные преобразования
Если при
Преобразование координат
Линейные преобразования наглядно записываются в матричной форме
т.е. матрица коэффициентов aij
Преобразование координат
Линейные преобразования наглядно записываются в матричной форме
т.е. матрица коэффициентов aij
Аффинные преобразования на плоскости
Зададим некоторую двумерную систему координат (x,y). Аффинное преобразование
Аффинные преобразования на плоскости
Зададим некоторую двумерную систему координат (x,y). Аффинное преобразование
Аффинные преобразования на плоскости
1. Параллельный сдвиг координат
0 dx x
dy
y
0 X
Y
В матричной
Аффинные преобразования на плоскости
1. Параллельный сдвиг координат
0 dx x
dy
y
0 X
Y
В матричной
Аффинные преобразования на плоскости
2. Растяжение-сжатие осей координат
0 x X
y
Y
В матричной форме:
Обратное
Аффинные преобразования на плоскости
2. Растяжение-сжатие осей координат
0 x X
y
Y
В матричной форме:
Обратное
Аффинные преобразования на плоскости
3. Поворот
В матричной форме:
Обратное преобразование:
y
Y
X
x
P
α
Аффинные преобразования на плоскости
3. Поворот
В матричной форме:
Обратное преобразование:
y
Y
X
x
P
α
Трехмерные аффинные преобразования
В общем виде записываются
где A, B, …, N –
Трехмерные аффинные преобразования
В общем виде записываются
где A, B, …, N –
Трехмерные аффинные преобразования
.
1. Сдвиг осей координат соответственно на dx, dy, dz:
2.
Трехмерные аффинные преобразования
.
1. Сдвиг осей координат соответственно на dx, dy, dz:
2.
Трехмерные аффинные преобразования
.
3. Повороты – в трехмерном пространстве существует больше разновидностей
Трехмерные аффинные преобразования
.
3. Повороты – в трехмерном пространстве существует больше разновидностей
 Мы в цифровом мире
Мы в цифровом мире Java OOP/OOD concepts
Java OOP/OOD concepts Основы программирования на Python. Лекция 1
Основы программирования на Python. Лекция 1 Функции в языке программирования VB
Функции в языке программирования VB Основы алгоритмизации и программирования. Структурированный тип данных массив
Основы алгоритмизации и программирования. Структурированный тип данных массив Website redesign
Website redesign Вычисления на GPU с использованием NVIDIA CUDA
Вычисления на GPU с использованием NVIDIA CUDA Технологии физического уровня. Технология широкополосного сигнала. Беспроводная связь. (Лекция 6.3.14)
Технологии физического уровня. Технология широкополосного сигнала. Беспроводная связь. (Лекция 6.3.14) Презентация к уроку информатики по теме Интернет: вред или польза?
Презентация к уроку информатики по теме Интернет: вред или польза? Основи комп’ютерних систем і мереж. Лекція 1
Основи комп’ютерних систем і мереж. Лекція 1 High and low level programming languages. Basics of programming languages
High and low level programming languages. Basics of programming languages Разработка информационной системы Магазин продуктов. Выпускная квалификационная работа
Разработка информационной системы Магазин продуктов. Выпускная квалификационная работа Комп’ютерний вірус
Комп’ютерний вірус Аппаратное и программное обеспечение компьютерных сетей
Аппаратное и программное обеспечение компьютерных сетей Использование электронной доски для развития творческих способностей учащихся начальной школы. Часть 3.
Использование электронной доски для развития творческих способностей учащихся начальной школы. Часть 3. Программирование линейных алгоритмов. Начала программирования. Информатика. 9 класс
Программирование линейных алгоритмов. Начала программирования. Информатика. 9 класс Безопасность в сети Интернет
Безопасность в сети Интернет Интеграция информационных технологий на уроке вокала
Интеграция информационных технологий на уроке вокала Защита от вредоносных программ
Защита от вредоносных программ История счета и систем счисления
История счета и систем счисления Робик. Конструкция повторения
Робик. Конструкция повторения Системы счисления. Что такое система счисления?
Системы счисления. Что такое система счисления? Збереження зображень. Діалогові вікна, їх об’єкти. Інформаційні вікна (урок 17, 5 клас)
Збереження зображень. Діалогові вікна, їх об’єкти. Інформаційні вікна (урок 17, 5 клас) Создание Web-сайтов
Создание Web-сайтов M/EEG source analysis
M/EEG source analysis Управление памятью
Управление памятью Особенности потокового ввода-вывода. Файлы
Особенности потокового ввода-вывода. Файлы Проектирование. Мультипликация
Проектирование. Мультипликация