- Моделирование телекоммуникационных систем. Основные понятия и определения

Содержание
- 2. Лекции читает канд.техн.наук, доцент Литвинов Владислав Леонидович
- 3. Список литературы: 1. О.И. Кутузов, Т.М. Татарникова МОДЕЛИРОВАНИЕ ТЕЛЕКОММУНИКАЦИОННЫХ СЕТЕЙ http://dvo.sut.ru/libr/ius/w101kutu/index.htm 2. Боев В. Д, Моделирование
- 4. Тема лекции 1: Моделирование телекоммуникационных систем. Основные понятия и определения.
- 5. Технология моделирования сложных технических систем, к классу которых относятся ТКС, опирается на имитационное машинное моделирование. Термин
- 6. Статистическое моделирование – это технология, основанная на применении законов математической статистики и способностях современных компьютеров порождать
- 7. Рис. 1.1 - Процесс моделирования системы
- 8. Блоки 1,2,3 представляют операции по исследованию одного варианта модели. Эти операции повторяются при различных реализациях случайных
- 9. В основе статистического моделирования лежит процедура, применяемая для моделирования случайных величин и функций и носящая название
- 10. В каждом опыте разыгрывается реализация х случайной величины Х (в i- м опыте реализация xi) в
- 11. На этом заканчивается очередной опыт. После того как проведено М опытов, вычисляется итоговая оценка в виде
- 12. Проиллюстрируем суть метода Монте-Карло относительно простым примером. Пусть требуется оценить надежность системы (рис.1.2). Система выполняет свою
- 13. Рис.1.2. Блочная структура системы
- 14. Таким образом, испытания реальной системы заменены на испытания математической модели. Каждое испытание сопровождается расчетом. Поэтому имитационное
- 15. Существует множество систем, процессы функционирования в которых могут быть представлены моделями информационных потоков, получившими название систем
- 16. Любая подобная система неизбежно испытывает различного рода возмущения, источниками которых могут быть либо внешние воздействия, обусловленные
- 17. За всю историю развития вычислительной техники было создано более 300 языков моделирования дискретных процессов. Одним из
- 18. GPSS (англ. General Purpose Simulation System — общецелевая система моделирования) — язык программирования — общецелевая система
- 19. Система GPSS была разработана сотрудником фирмы IBMСистема GPSS была разработана сотрудником фирмы IBM Джефри ГордономСистема GPSS
- 20. Система GPSS изучается во многих учебных заведениях в России и за рубежом. Широко используется для решения
- 21. В математических моделях (ММ) сложных объектов , представленных в виде систем массового обслуживания (СМО), фигурируют средства
- 22. Имитационная модель СМО представляет собой алгоритм, отражающий поведение СМО, т.е. отражающий изменения состояния СМО во времени
- 23. Основное свойство ОА, учитываемоеОсновное свойство ОА, учитываемое в модели СМО, - это затраты времени на обслуживание,
- 24. Дисциплина обслуживания -правило, по которому заявки поступают из очередей на обслуживание. Величина, характеризующее право на первоочередное
- 25. Основной тип ОА - устройства, именно в них происходит обработка транзактов с затратами времени. К ОА
- 26. Пример кода для системы GPSS World GENERATE (POISSON(1,40)) ; генерация потока транзактов ; Поток транзактов пуассоновский
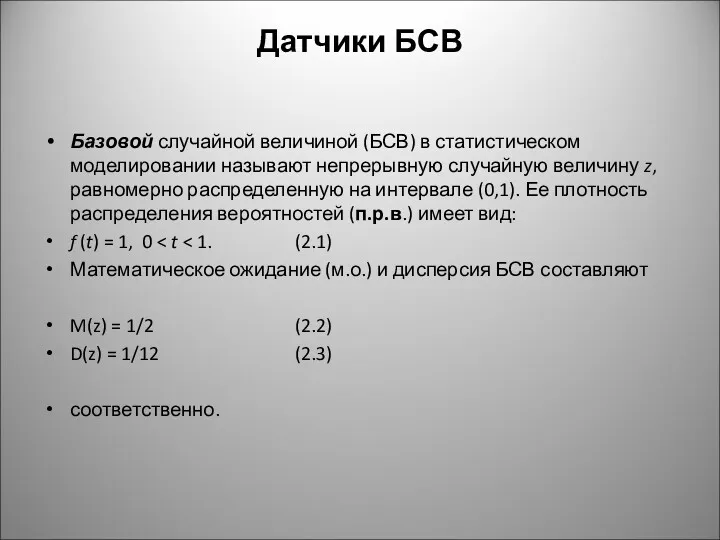
- 27. Датчики БСВ Базовой случайной величиной (БСВ) в статистическом моделировании называют непрерывную случайную величину z, равномерно распределенную
- 28. БСВ моделируется на ЭВМ с помощью датчиков БСВ. Датчик БСВ - это устройство или программа, выдающая
- 29. Программный датчик БСВ обычно вычисляет значения z1, z2,..., по какой-либо рекуррентной формуле типа zi = f
- 30. Имея датчик БСВ z, можно промоделировать любые случайные факторы: непрерывные или дискретные случайные величины (как простые,
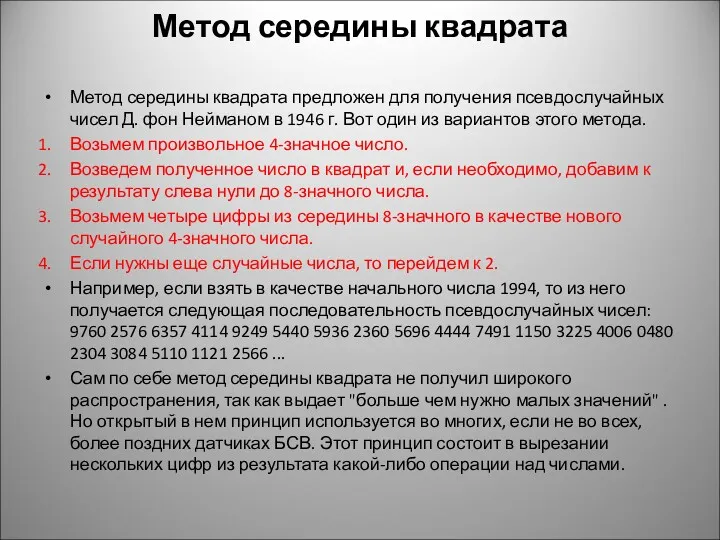
- 31. Метод середины квадрата Метод середины квадрата предложен для получения псевдослучайных чисел Д. фон Нейманом в 1946
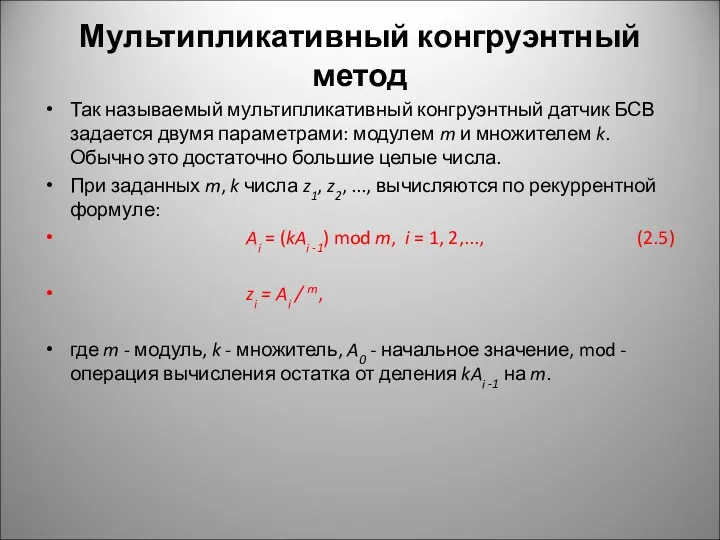
- 32. Мультипликативный конгруэнтный метод Так называемый мультипликативный конгруэнтный датчик БСВ задается двумя параметрами: модулем m и множителем
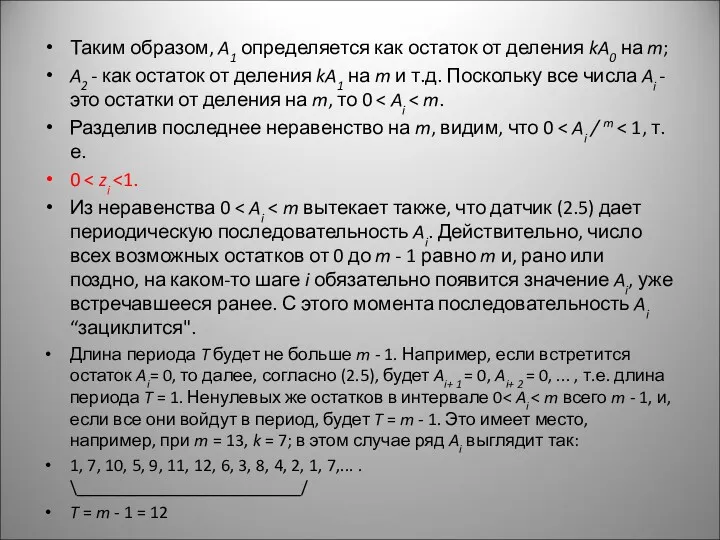
- 33. Таким образом, A1 определяется как остаток от деления kA0 на m; A2 - как остаток от
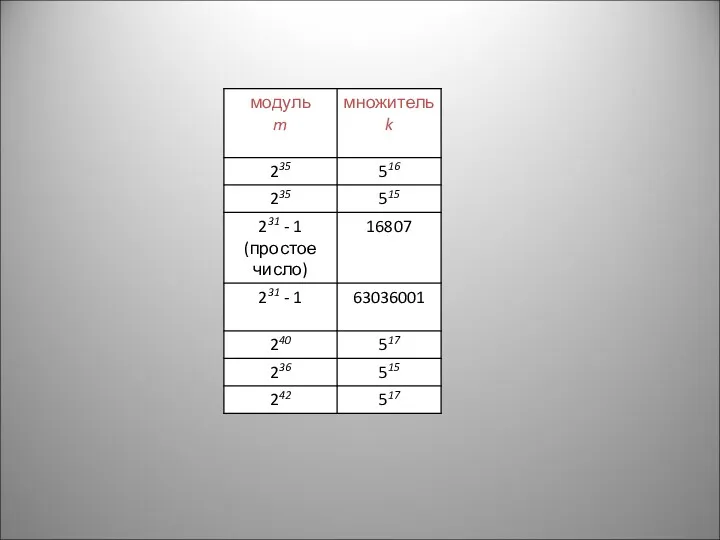
- 34. Поскольку в качестве случайной можно использовать лишь подпоследовательность Ai внутри одного периода, то параметры датчика выбирают
- 35. Датчик (2.5) называют мультипликативно-конгруэнтным потому, что он использует две основные операции - умножение (англ. multiplication) и
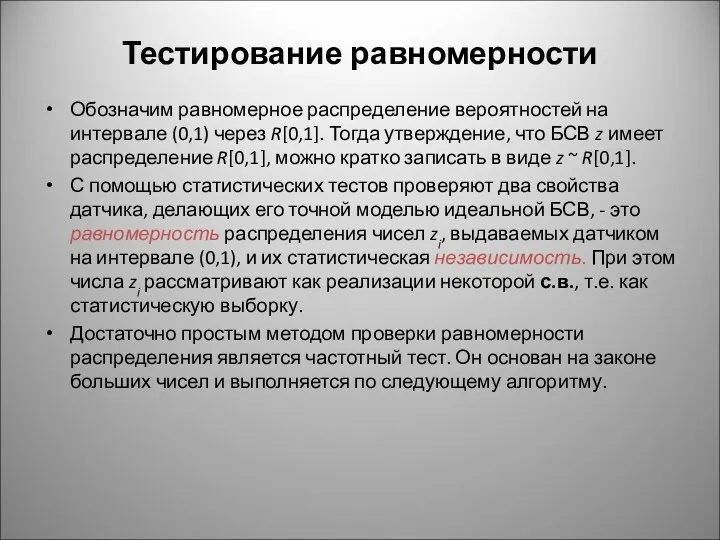
- 37. Тестирование равномерности Обозначим равномерное распределение вероятностей на интервале (0,1) через R[0,1]. Тогда утверждение, что БСВ z
- 38. 1. Разобьем интервал (0,1) на K равных отрезков (например, K = 10). 2. Сгенерируем n чисел
- 39. Это значит, что высоты столбиков во второй гистограмме должны в целом быть ближе к уровню 1/K,
- 40. n=1000 n=100000
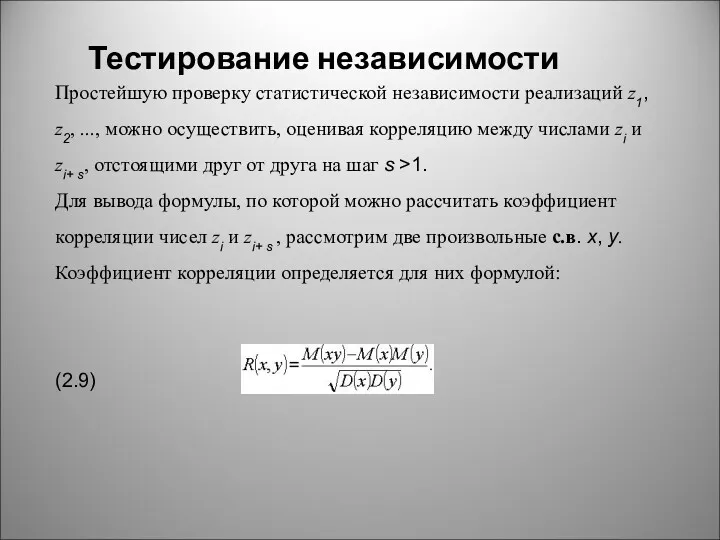
- 41. Тестирование независимости Простейшую проверку статистической независимости реализаций z1, z2, ..., можно осуществить, оценивая корреляцию между числами
- 42. Если известно, что x, y ~ R[0,1], то M(x) = M(y) = 1/2 и D(x) =
- 43. С ростом n оценка R' должна приближаться к нулю, в противном случае датчик БСВ не отвечает
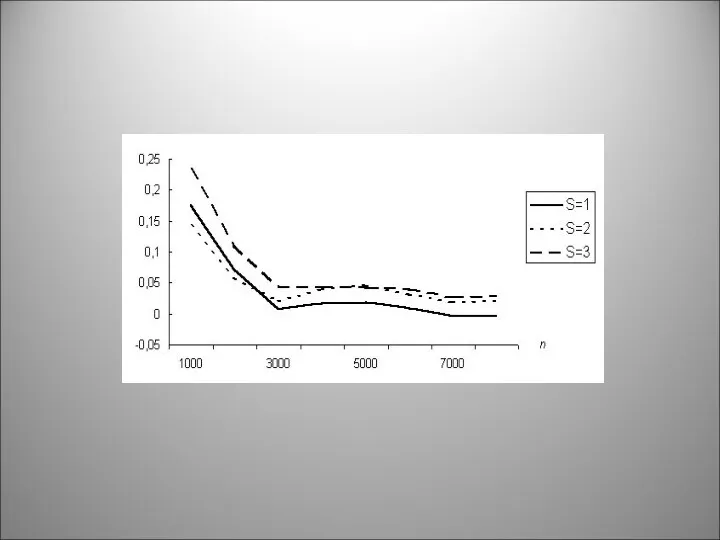
- 44. В табл. 2.3 показан пример тестирования датчика БСВ. Как видно из таблицы, оценки коэффициентов корреляции для
- 47. Скачать презентацию
Лекции читает
канд.техн.наук, доцент
Литвинов Владислав Леонидович
Лекции читает
канд.техн.наук, доцент
Литвинов Владислав Леонидович
Список литературы:
1. О.И. Кутузов, Т.М. Татарникова
МОДЕЛИРОВАНИЕ
ТЕЛЕКОММУНИКАЦИОННЫХ СЕТЕЙ
http://dvo.sut.ru/libr/ius/w101kutu/index.htm
2. Боев В.
Список литературы:
1. О.И. Кутузов, Т.М. Татарникова
МОДЕЛИРОВАНИЕ
ТЕЛЕКОММУНИКАЦИОННЫХ СЕТЕЙ
http://dvo.sut.ru/libr/ius/w101kutu/index.htm
2. Боев В.
Тема лекции 1:
Моделирование телекоммуникационных систем.
Основные понятия и определения.
Тема лекции 1:
Моделирование телекоммуникационных систем.
Основные понятия и определения.
Технология моделирования сложных технических систем, к классу которых относятся ТКС, опирается
Технология моделирования сложных технических систем, к классу которых относятся ТКС, опирается
Статистическое моделирование – это технология, основанная на применении законов математической статистики
Статистическое моделирование – это технология, основанная на применении законов математической статистики
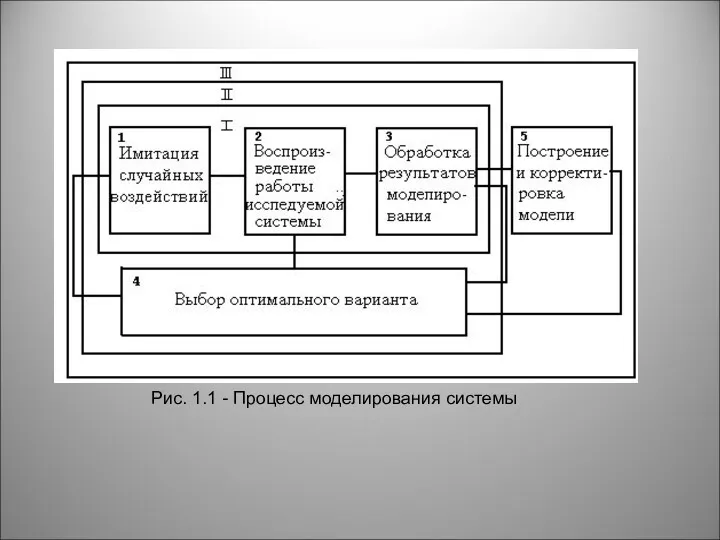
Рис. 1.1 - Процесс моделирования системы
Рис. 1.1 - Процесс моделирования системы
Блоки 1,2,3 представляют операции по исследованию одного варианта модели. Эти операции
Блоки 1,2,3 представляют операции по исследованию одного варианта модели. Эти операции
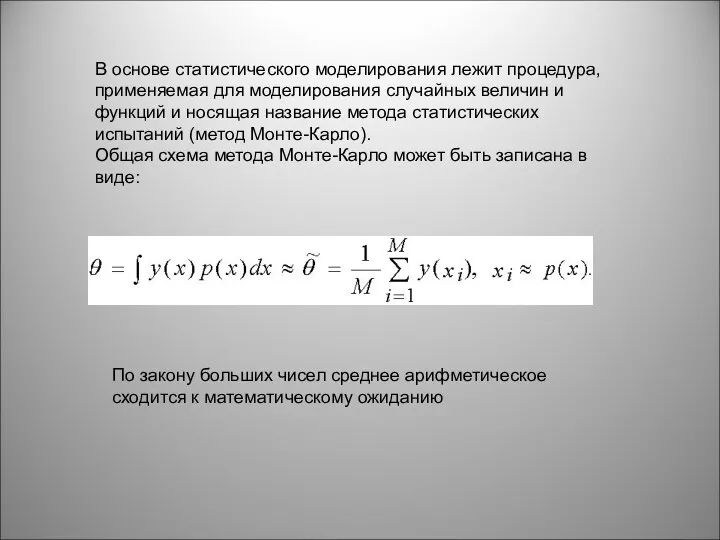
В основе статистического моделирования лежит процедура, применяемая для моделирования случайных величин
В основе статистического моделирования лежит процедура, применяемая для моделирования случайных величин
В каждом опыте разыгрывается реализация х случайной величины Х (в i-
В каждом опыте разыгрывается реализация х случайной величины Х (в i-
На этом заканчивается очередной опыт. После того как проведено М опытов,
На этом заканчивается очередной опыт. После того как проведено М опытов,
Проиллюстрируем суть метода Монте-Карло относительно простым примером. Пусть требуется оценить надежность
Проиллюстрируем суть метода Монте-Карло относительно простым примером. Пусть требуется оценить надежность
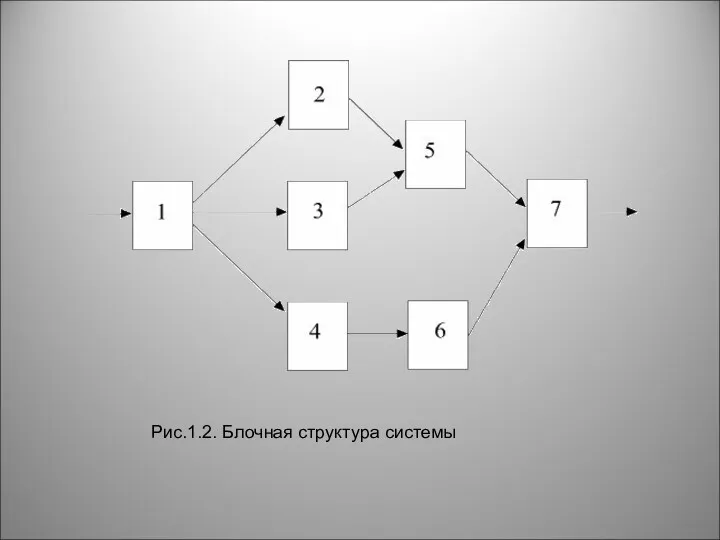
Рис.1.2. Блочная структура системы
Рис.1.2. Блочная структура системы
Таким образом, испытания реальной системы заменены на испытания математической модели. Каждое
Таким образом, испытания реальной системы заменены на испытания математической модели. Каждое
Существует множество систем, процессы функционирования в которых могут быть представлены моделями
Существует множество систем, процессы функционирования в которых могут быть представлены моделями
Любая подобная система неизбежно испытывает различного рода возмущения, источниками которых могут
Любая подобная система неизбежно испытывает различного рода возмущения, источниками которых могут
За всю историю развития вычислительной техники было создано более 300 языков
За всю историю развития вычислительной техники было создано более 300 языков
GPSS (англ. General Purpose Simulation System — общецелевая система моделирования) —
GPSS (англ. General Purpose Simulation System — общецелевая система моделирования) —
Система GPSS была разработана сотрудником фирмы IBMСистема GPSS была разработана сотрудником
Система GPSS была разработана сотрудником фирмы IBMСистема GPSS была разработана сотрудником
Система GPSS изучается во многих учебных заведениях в России и за
Система GPSS изучается во многих учебных заведениях в России и за
В математических моделях (ММ) сложных объектов , представленных в виде систем
В математических моделях (ММ) сложных объектов , представленных в виде систем
Имитационная модель СМО представляет собой алгоритм, отражающий поведение СМО, т.е. отражающий
Имитационная модель СМО представляет собой алгоритм, отражающий поведение СМО, т.е. отражающий
Основное свойство ОА, учитываемоеОсновное свойство ОА, учитываемое в модели СМО, -
Основное свойство ОА, учитываемоеОсновное свойство ОА, учитываемое в модели СМО, -
Дисциплина обслуживания -правило, по которому заявки поступают из очередей на обслуживание.
Дисциплина обслуживания -правило, по которому заявки поступают из очередей на обслуживание.
Основной тип ОА - устройства, именно в них происходит обработка транзактов
Основной тип ОА - устройства, именно в них происходит обработка транзактов
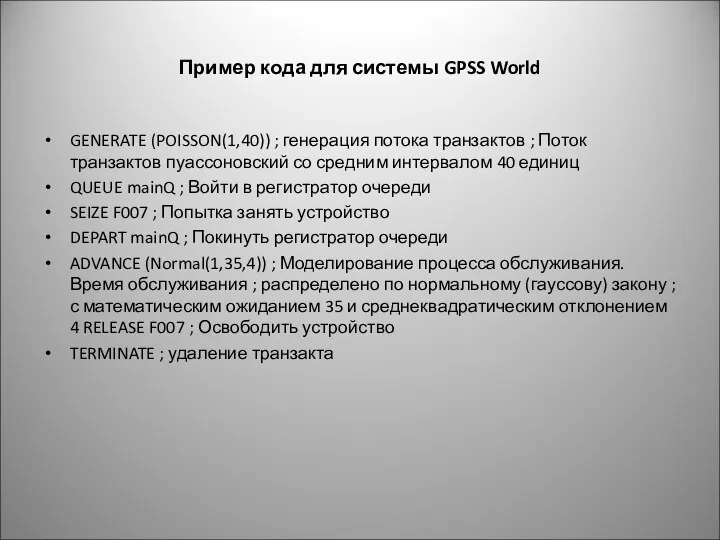
Пример кода для системы GPSS World
GENERATE (POISSON(1,40)) ; генерация потока транзактов
Пример кода для системы GPSS World
GENERATE (POISSON(1,40)) ; генерация потока транзактов
Датчики БСВ
Базовой случайной величиной (БСВ) в статистическом моделировании называют непрерывную случайную
Датчики БСВ
Базовой случайной величиной (БСВ) в статистическом моделировании называют непрерывную случайную
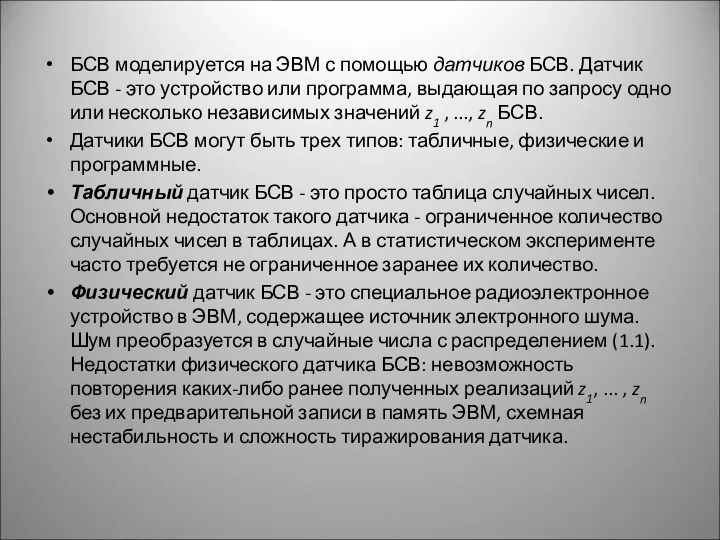
БСВ моделируется на ЭВМ с помощью датчиков БСВ. Датчик БСВ -
БСВ моделируется на ЭВМ с помощью датчиков БСВ. Датчик БСВ -
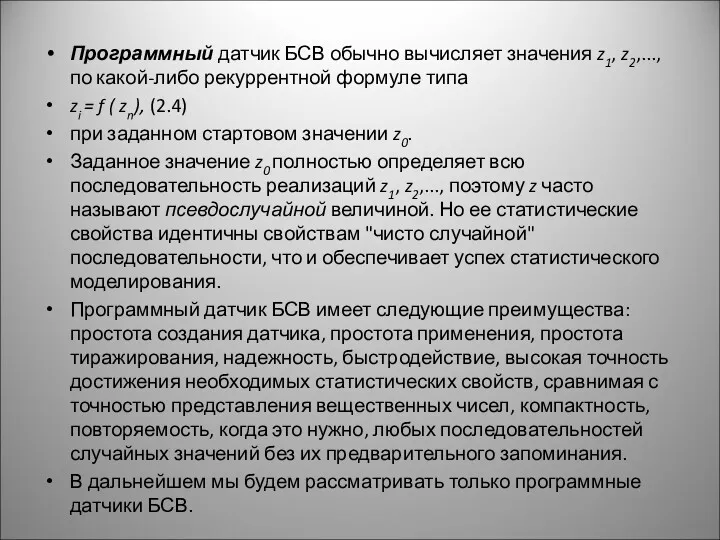
Программный датчик БСВ обычно вычисляет значения z1, z2,..., по какой-либо рекуррентной
Программный датчик БСВ обычно вычисляет значения z1, z2,..., по какой-либо рекуррентной
Имея датчик БСВ z, можно промоделировать любые случайные факторы: непрерывные или
Имея датчик БСВ z, можно промоделировать любые случайные факторы: непрерывные или
Метод середины квадрата
Метод середины квадрата предложен для получения псевдослучайных чисел Д.
Метод середины квадрата
Метод середины квадрата предложен для получения псевдослучайных чисел Д.
Мультипликативный конгруэнтный метод
Так называемый мультипликативный конгруэнтный датчик БСВ задается двумя параметрами:
Мультипликативный конгруэнтный метод
Так называемый мультипликативный конгруэнтный датчик БСВ задается двумя параметрами:
Таким образом, A1 определяется как остаток от деления kA0 на m;
Таким образом, A1 определяется как остаток от деления kA0 на m;
Поскольку в качестве случайной можно использовать лишь подпоследовательность Ai внутри одного
Поскольку в качестве случайной можно использовать лишь подпоследовательность Ai внутри одного
Датчик (2.5) называют мультипликативно-конгруэнтным потому, что он использует две основные операции
Датчик (2.5) называют мультипликативно-конгруэнтным потому, что он использует две основные операции
Тестирование равномерности
Обозначим равномерное распределение вероятностей на интервале (0,1) через R[0,1]. Тогда
Тестирование равномерности
Обозначим равномерное распределение вероятностей на интервале (0,1) через R[0,1]. Тогда
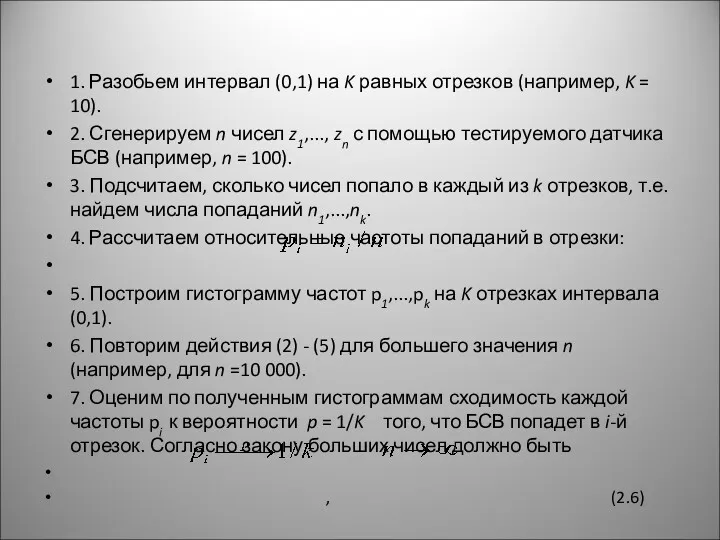
1. Разобьем интервал (0,1) на K равных отрезков (например, K =
1. Разобьем интервал (0,1) на K равных отрезков (например, K =
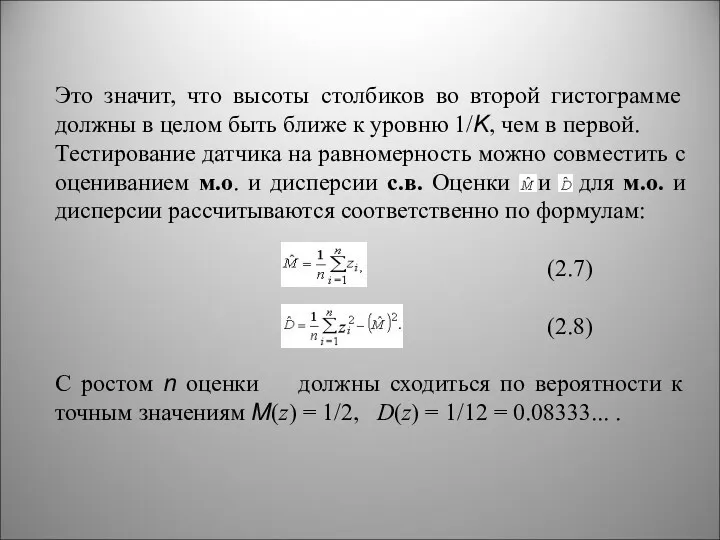
Это значит, что высоты столбиков во второй гистограмме должны в целом
Это значит, что высоты столбиков во второй гистограмме должны в целом
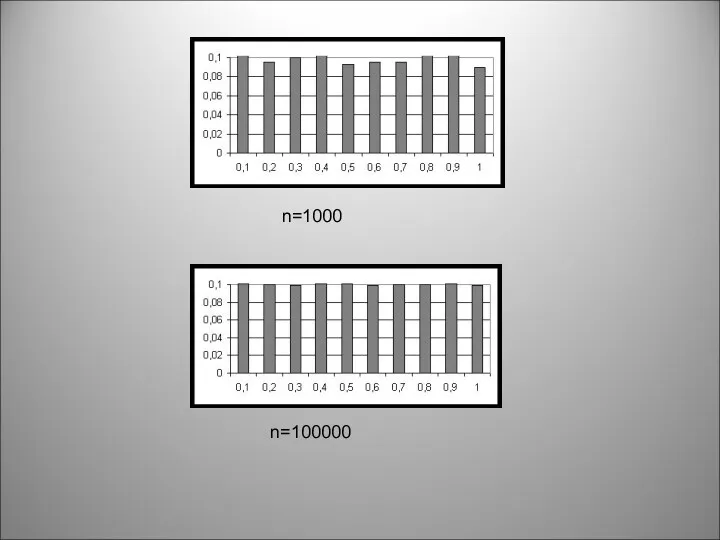
n=1000
n=100000
n=1000
n=100000
Тестирование независимости
Простейшую проверку статистической независимости реализаций z1, z2, ..., можно осуществить,
Тестирование независимости
Простейшую проверку статистической независимости реализаций z1, z2, ..., можно осуществить,
![Если известно, что x, y ~ R[0,1], то M(x) =](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/262462/slide-41.jpg)
Если известно, что x, y ~ R[0,1], то M(x) = M(y)
Если известно, что x, y ~ R[0,1], то M(x) = M(y)
С ростом n оценка R' должна приближаться к нулю, в противном
С ростом n оценка R' должна приближаться к нулю, в противном
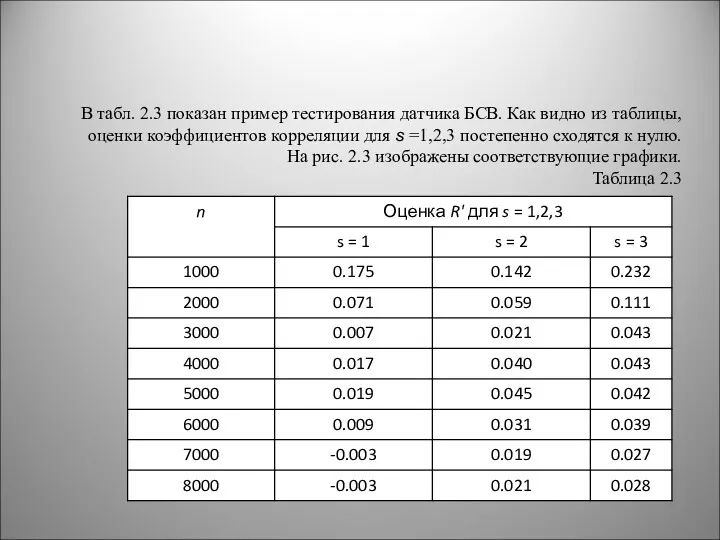
В табл. 2.3 показан пример тестирования датчика БСВ. Как видно из
В табл. 2.3 показан пример тестирования датчика БСВ. Как видно из
 Игровая среда программирования Scratch
Игровая среда программирования Scratch Data Mining and Text Mining
Data Mining and Text Mining Язык GPSS. Синхронизация транзактов. Работа с потоками данных. Лекция 4
Язык GPSS. Синхронизация транзактов. Работа с потоками данных. Лекция 4 Информационные системы и технологии
Информационные системы и технологии Алгоритм и его формальное исполнение. 10 класс
Алгоритм и его формальное исполнение. 10 класс Алгоритмизация и программирование. Язык Python
Алгоритмизация и программирование. Язык Python Содержательный и алфавитный подходы к измерению информации
Содержательный и алфавитный подходы к измерению информации Лекция 4. Форматы графических файлов. Понятие и виды форматов
Лекция 4. Форматы графических файлов. Понятие и виды форматов Форматирование текста. Обработка текстовой информации. 7 класс
Форматирование текста. Обработка текстовой информации. 7 класс История развития интернета
История развития интернета Успеть за 24 часа: Как грамотно организовать рабочие процессы с помощью сервиса Битрикс24
Успеть за 24 часа: Как грамотно организовать рабочие процессы с помощью сервиса Битрикс24 What’s the Internet
What’s the Internet Алгоритмы 3D графики
Алгоритмы 3D графики Нефункциональные требования
Нефункциональные требования Локальные вычислительные сети (ЛВС)
Локальные вычислительные сети (ЛВС) Онлайн-интенсив. Английский для начинающих
Онлайн-интенсив. Английский для начинающих Компьютерные сети
Компьютерные сети Программирование виртуальной реальности с Alice и Java. (Лекция 1)
Программирование виртуальной реальности с Alice и Java. (Лекция 1) Основные элементы языка программирования Паскаль
Основные элементы языка программирования Паскаль Презентация Борьба с компьютерными вирусами при работе на ПК
Презентация Борьба с компьютерными вирусами при работе на ПК Информационная безопасность. Криптографические средства защиты данных. Шифрование
Информационная безопасность. Криптографические средства защиты данных. Шифрование Учет затрат и расчет себестоимости для МСФО
Учет затрат и расчет себестоимости для МСФО Интерфейс пользователя
Интерфейс пользователя Мой Арбитр
Мой Арбитр Компьютерные презентации. Мультимедиа
Компьютерные презентации. Мультимедиа Использование интернет и информационных технологий на уроках истории
Использование интернет и информационных технологий на уроках истории Информационная технология хранения данных
Информационная технология хранения данных Basic device configuration switching, routing and wireless
Basic device configuration switching, routing and wireless