- Operating system. Processes

Содержание
- 4. Introduction מערכות המחשב (ומערכות ההפעלה) הראשונות: אפשרו הרצת תכנית אחת (בלבד) בו זמנית לתכנית המורצת היתה
- 5. מטרות השיעור להציג את ה"תהליך" (process) – תוכנית בהרצה (program in execution), לתאר מספר מאפיינים (features)
- 6. Process Concept בקורס נשתמש במושגים job ו- process כחליפיים Jobs – בד"כ מתייחס ל- batch systems
- 7. Process in Memory Usually temporary data (such as function parameters, return addresses, and local variables) –
- 8. Program and Process על-בסיס אותה תוכנית ניתן להריץ שני תהליכים או יותר (במקביל), כשלכל אחד יש
- 9. Process State במהלך ריצתו משנה התהליך את מצבו (state): new: The process is being created running:
- 10. Diagram of Process State
- 11. Process Control Block (PCB) Information associated with each process Process state Program counter – address of
- 12. CPU Switch From Process to Process
- 13. Process Scheduling Queues המטרה – שבכל עת יהיה תהליך שיכול לרוץ על המעבד (לצורך מקסום ניצולת
- 14. Ready Queue And Various I/O Device Queues
- 15. Representation of Process Scheduling Queuing Diagram Wait for the child to finish execution Why start at
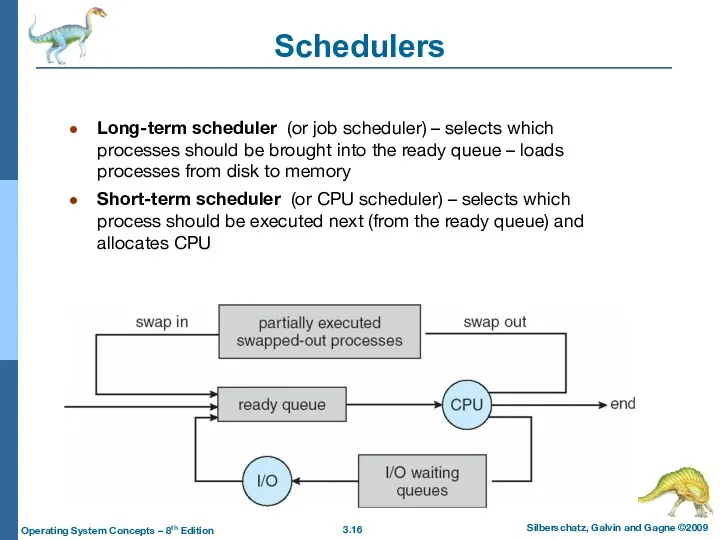
- 16. Schedulers Long-term scheduler (or job scheduler) – selects which processes should be brought into the ready
- 17. Schedulers (Cont) ה- short-term scheduler נכנס לפעולה בצורה תדירה (כל מספר מילישניות): חייב להיות מהיר, אחרת
- 18. Schedulers (Cont) תהליכים מאופיינים כ: I/O bound – מבלים את רוב זמנם בפעולות I/O ומעט מאוד
- 19. Context Switch כאשר המעבד עובר לטפל בתהליך אחר, המערכת חייבת לשמור את ה- state של התהליך
- 21. Process Creation Creating a process – using create process system call Parent process create children processes,
- 22. Process Creation (Cont) Execution Parent and children execute concurrently Parent waits until children terminate Address space
- 23. Process Creation
- 24. C Program Forking Separate Process int main() { pid_t pid; /* fork another process */ pid
- 25. Process Termination בסיום פעולתו נדרש התהליך להריץ את הפקודה exit: מערכת ההפעלה מוחקת אותו מרשמית התהליכים
- 26. Interprocess Communication תהליכים צריכים דרך לחלוק ולשתף מידע ביניהם: בין שרצים באותה מערכת ובין שרצים במערכות
- 27. Communications Models Better for exchanging small messages (no conflicts need to be avoided) Easier to implement
- 28. Producer-Consumer Problem Paradigm for cooperating processes, producer process produces information that is consumed by a consumer
- 29. Bounded-Buffer – Shared-Memory Solution Shared data #define BUFFER_SIZE 10 typedef struct { . . . }
- 30. Bounded-Buffer – Producer while (true) { /* Produce an item */ while (((in + 1) %
- 31. Bounded Buffer – Consumer while (true) { while (in == out) ; // do nothing --
- 32. Interprocess Communication – Message Passing מהווה מכאניזם לתקשורת וסנכרון בין תהליכים הרעיון הוא שהתהליכים יתקשרו ללא
- 33. Direct Communication Processes must name each other explicitly: send (P, message) – send a message to
- 34. Indirect Communication Messages are directed and received from mailboxes (also referred to as ports) Each mailbox
- 35. Indirect Communication Operations create a new mailbox send and receive messages through mailbox destroy a mailbox
- 36. Indirect Communication Mailbox sharing P1, P2, and P3 share mailbox A P1, sends; P2 and P3
- 37. Synchronization מנגנון ה- message passing יכול להיות מאופיין כ- blocking or non-blocking תצורת blocking נחשבת תצורה
- 38. Buffering Whether direct or indirect, messages must reside in a queue; implemented in one of three
- 39. Communications in Client-Server Systems Sockets Remote Procedure Calls Remote Method Invocation (Java)
- 40. Sockets A socket is defined as an endpoint for communication Concatenation of IP address and port
- 41. What is a socket? An interface between application and network The application creates a socket The
- 42. Socket Communication Server waits for incoming client requests by listening to a specified port Servers implementing
- 43. Remote Procedure Calls Remote procedure call (RPC) abstracts procedure calls between processes on networked systems Stubs
- 44. Remote Method Invocation Remote Method Invocation (RMI) is a Java mechanism similar to RPCs RMI allows
- 45. Marshalling Parameters The RMI principle: the definition of behavior and the implementation of that behavior are
- 47. Скачать презентацию
Introduction
מערכות המחשב (ומערכות ההפעלה) הראשונות:
אפשרו הרצת תכנית אחת (בלבד) בו זמנית
לתכנית
Introduction
מערכות המחשב (ומערכות ההפעלה) הראשונות:
אפשרו הרצת תכנית אחת (בלבד) בו זמנית
לתכנית
מטרות השיעור
להציג את ה"תהליך" (process) – תוכנית בהרצה (program in execution),
מטרות השיעור
להציג את ה"תהליך" (process) – תוכנית בהרצה (program in execution),
Process Concept
בקורס נשתמש במושגים job ו- process כחליפיים
Jobs – בד"כ מתייחס
Process Concept
בקורס נשתמש במושגים job ו- process כחליפיים
Jobs – בד"כ מתייחס
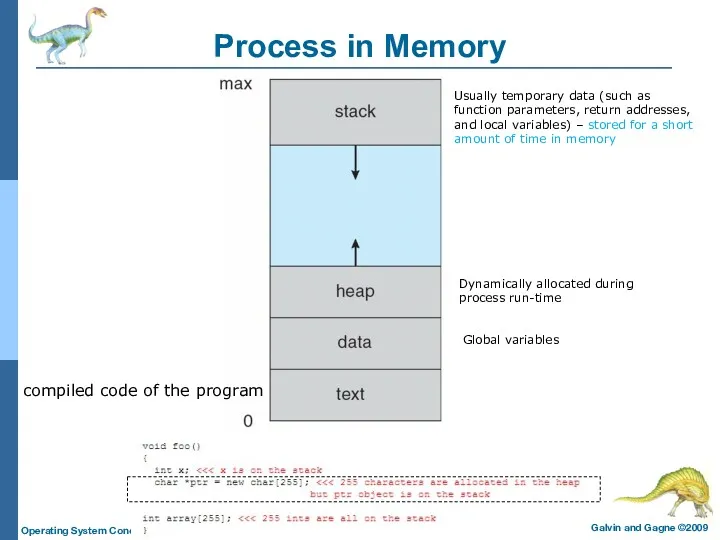
Process in Memory
Usually temporary data (such as function parameters, return addresses,
Process in Memory
Usually temporary data (such as function parameters, return addresses,
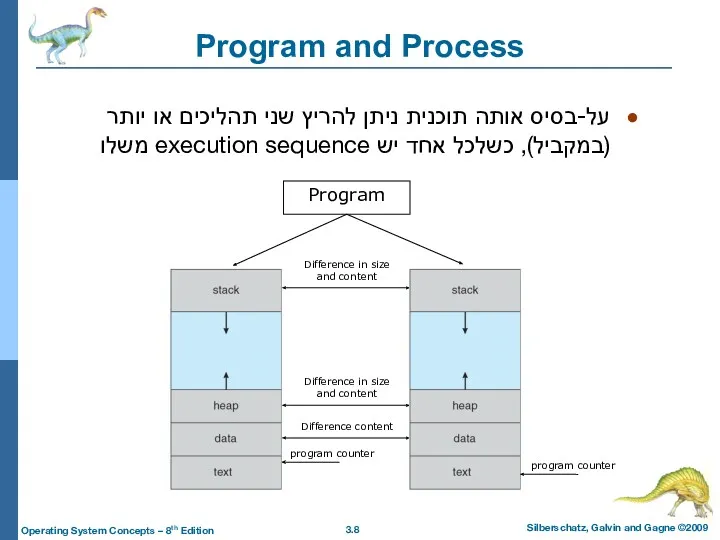
Program and Process
על-בסיס אותה תוכנית ניתן להריץ שני תהליכים או יותר
Program and Process
על-בסיס אותה תוכנית ניתן להריץ שני תהליכים או יותר
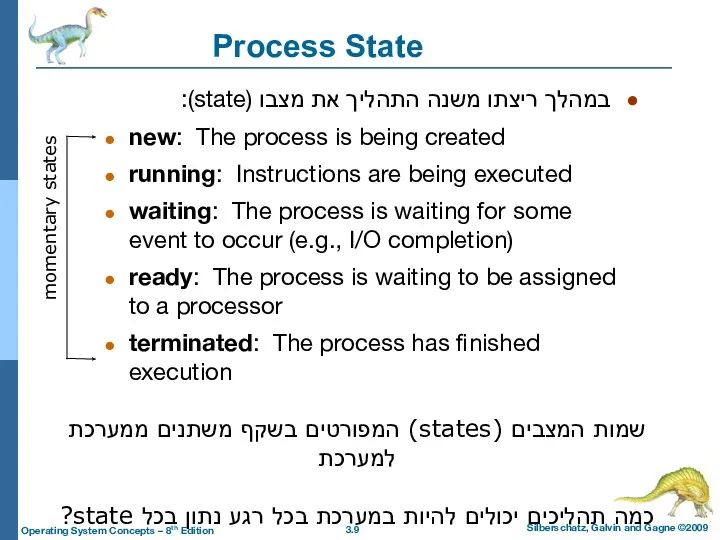
Process State
במהלך ריצתו משנה התהליך את מצבו (state):
new: The process is
Process State
במהלך ריצתו משנה התהליך את מצבו (state):
new: The process is
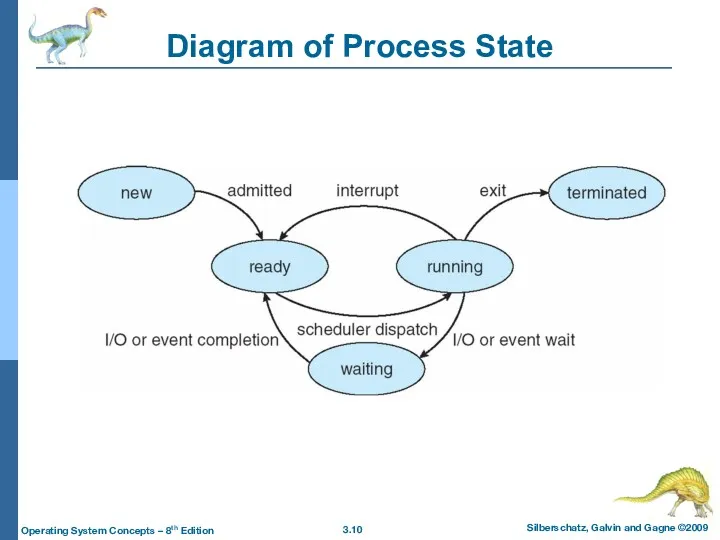
Diagram of Process State
Diagram of Process State
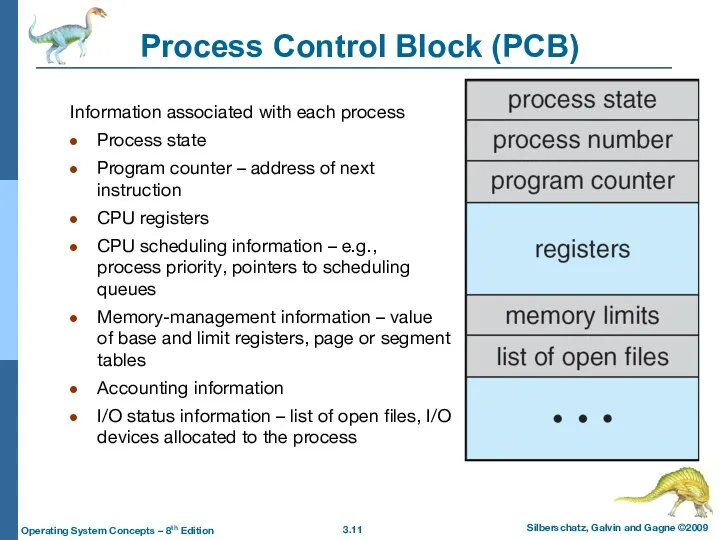
Process Control Block (PCB)
Information associated with each process
Process state
Program counter –
Process Control Block (PCB)
Information associated with each process
Process state
Program counter –
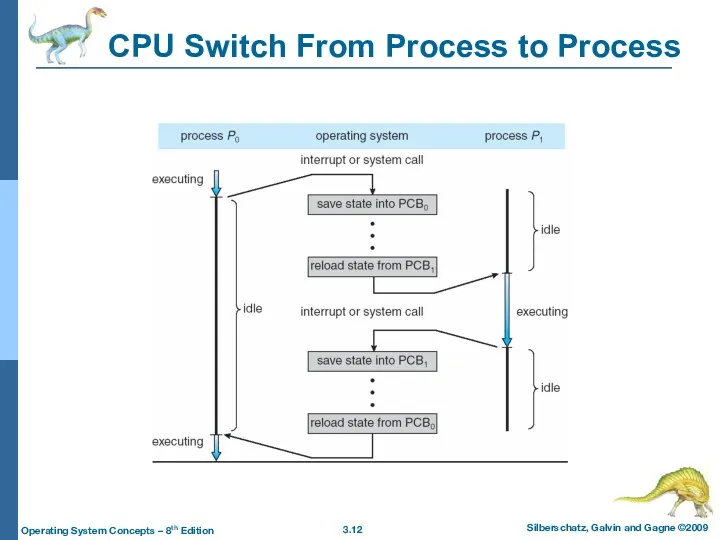
CPU Switch From Process to Process
CPU Switch From Process to Process
Process Scheduling Queues
המטרה – שבכל עת יהיה תהליך שיכול לרוץ על
Process Scheduling Queues
המטרה – שבכל עת יהיה תהליך שיכול לרוץ על
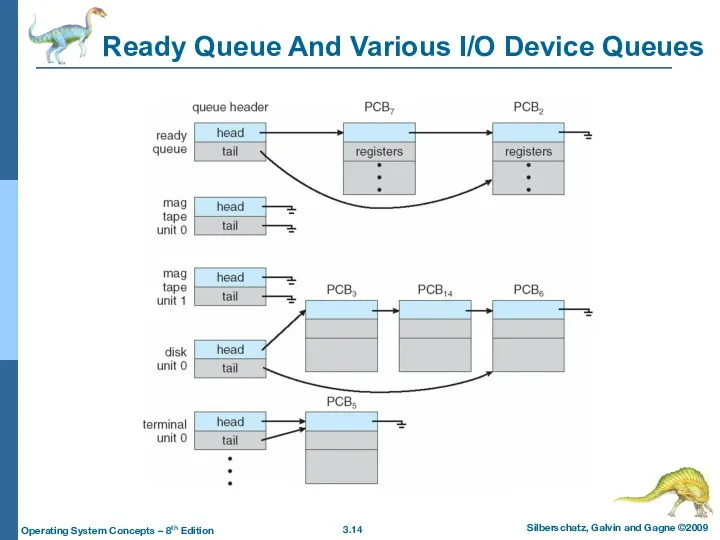
Ready Queue And Various I/O Device Queues
Ready Queue And Various I/O Device Queues
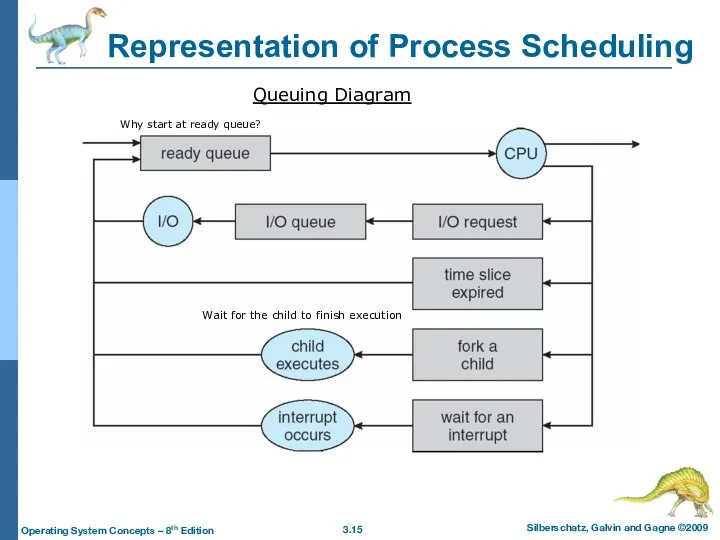
Representation of Process Scheduling
Queuing Diagram
Wait for the child to finish execution
Why
Representation of Process Scheduling
Queuing Diagram
Wait for the child to finish execution
Why
Schedulers
Long-term scheduler (or job scheduler) – selects which processes should be
Schedulers
Long-term scheduler (or job scheduler) – selects which processes should be
Schedulers (Cont)
ה- short-term scheduler נכנס לפעולה בצורה תדירה (כל מספר מילישניות):
חייב
Schedulers (Cont)
ה- short-term scheduler נכנס לפעולה בצורה תדירה (כל מספר מילישניות):
חייב
Schedulers (Cont)
תהליכים מאופיינים כ:
I/O bound – מבלים את רוב זמנם בפעולות
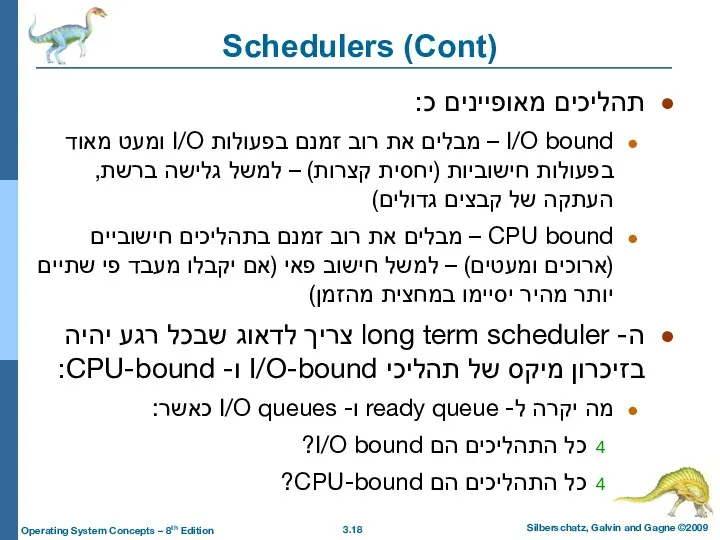
Schedulers (Cont)
תהליכים מאופיינים כ:
I/O bound – מבלים את רוב זמנם בפעולות
Context Switch
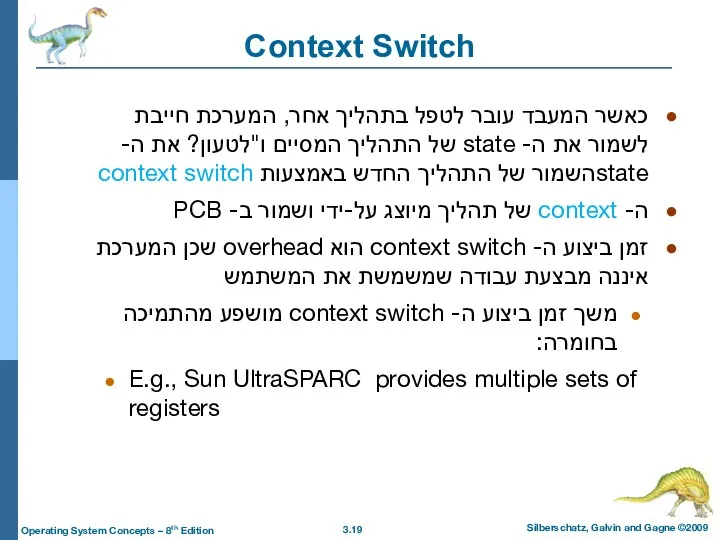
כאשר המעבד עובר לטפל בתהליך אחר, המערכת חייבת לשמור את
Context Switch
כאשר המעבד עובר לטפל בתהליך אחר, המערכת חייבת לשמור את
Process Creation
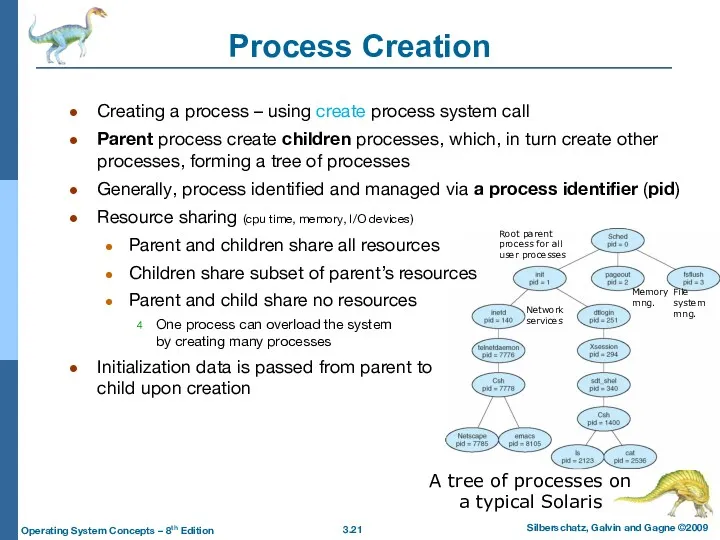
Creating a process – using create process system call
Parent process
Process Creation
Creating a process – using create process system call
Parent process
Process Creation (Cont)
Execution
Parent and children execute concurrently
Parent waits until children terminate
Address
Process Creation (Cont)
Execution
Parent and children execute concurrently
Parent waits until children terminate
Address

Process Creation
Process Creation
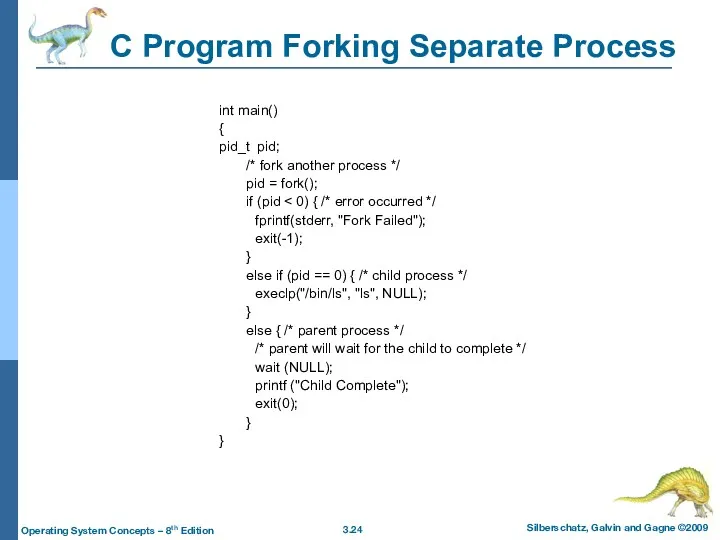
C Program Forking Separate Process
int main()
{
pid_t pid;
/* fork another process */
pid
C Program Forking Separate Process
int main()
{
pid_t pid;
/* fork another process */
pid
Process Termination
בסיום פעולתו נדרש התהליך להריץ את הפקודה exit:
מערכת ההפעלה מוחקת
Process Termination
בסיום פעולתו נדרש התהליך להריץ את הפקודה exit:
מערכת ההפעלה מוחקת
Interprocess Communication
תהליכים צריכים דרך לחלוק ולשתף מידע ביניהם:
בין שרצים באותה מערכת
Interprocess Communication
תהליכים צריכים דרך לחלוק ולשתף מידע ביניהם:
בין שרצים באותה מערכת
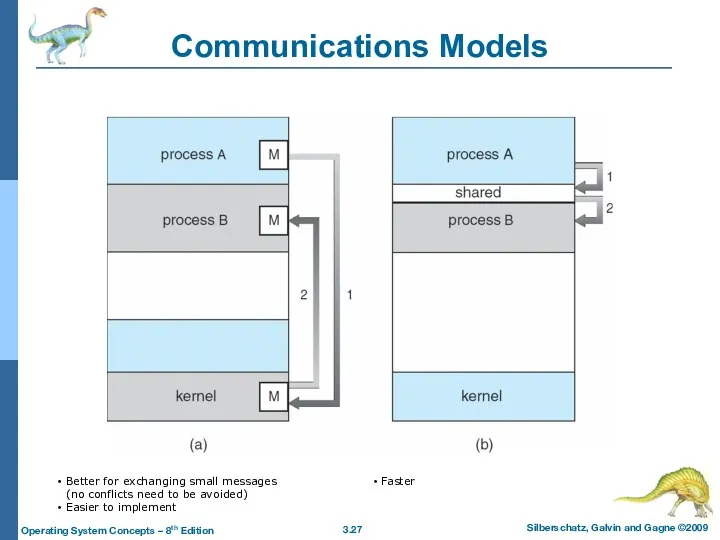
Communications Models
Better for exchanging small messages (no conflicts need to
Communications Models
Better for exchanging small messages (no conflicts need to
Producer-Consumer Problem
Paradigm for cooperating processes, producer process produces information that is
Producer-Consumer Problem
Paradigm for cooperating processes, producer process produces information that is
Bounded-Buffer – Shared-Memory Solution
Shared data
#define BUFFER_SIZE 10
typedef struct {
. . .
}
Bounded-Buffer – Shared-Memory Solution
Shared data
#define BUFFER_SIZE 10
typedef struct {
. . .
}
Bounded-Buffer – Producer
while (true) {
/* Produce an item */
while
Bounded-Buffer – Producer
while (true) {
/* Produce an item */
while
Bounded Buffer – Consumer
while (true) {
while (in == out)
;
Bounded Buffer – Consumer
while (true) {
while (in == out)
;
Interprocess Communication – Message Passing
מהווה מכאניזם לתקשורת וסנכרון בין תהליכים
הרעיון הוא
Interprocess Communication – Message Passing
מהווה מכאניזם לתקשורת וסנכרון בין תהליכים
הרעיון הוא
Direct Communication
Processes must name each other explicitly:
send (P, message) – send
Direct Communication
Processes must name each other explicitly:
send (P, message) – send
Indirect Communication
Messages are directed and received from mailboxes (also referred to
Indirect Communication
Messages are directed and received from mailboxes (also referred to
Indirect Communication
Operations
create a new mailbox
send and receive messages through mailbox
destroy a
Indirect Communication
Operations
create a new mailbox
send and receive messages through mailbox
destroy a
Indirect Communication
Mailbox sharing
P1, P2, and P3 share mailbox A
P1, sends; P2
Indirect Communication
Mailbox sharing
P1, P2, and P3 share mailbox A
P1, sends; P2
Synchronization
מנגנון ה- message passing יכול להיות מאופיין כ- blocking or non-blocking
תצורת
Synchronization
מנגנון ה- message passing יכול להיות מאופיין כ- blocking or non-blocking
תצורת
Buffering
Whether direct or indirect, messages must reside in a queue; implemented
Buffering
Whether direct or indirect, messages must reside in a queue; implemented
Communications in Client-Server Systems
Sockets
Remote Procedure Calls
Remote Method Invocation (Java)
Communications in Client-Server Systems
Sockets
Remote Procedure Calls
Remote Method Invocation (Java)
Sockets
A socket is defined as an endpoint for communication
Concatenation of IP
Sockets
A socket is defined as an endpoint for communication
Concatenation of IP

What is a socket?
An interface between application and network
The application creates
What is a socket?
An interface between application and network
The application creates
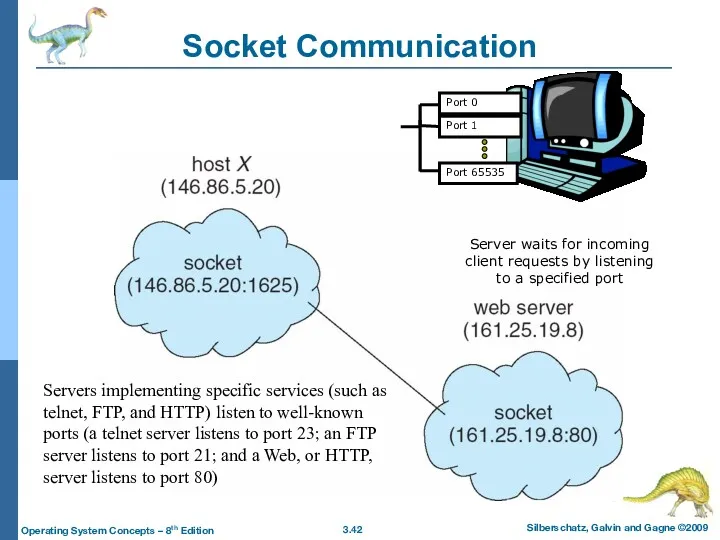
Socket Communication
Server waits for incoming client requests by listening to a
Socket Communication
Server waits for incoming client requests by listening to a

Remote Procedure Calls
Remote procedure call (RPC) abstracts procedure calls between processes
Remote Procedure Calls
Remote procedure call (RPC) abstracts procedure calls between processes
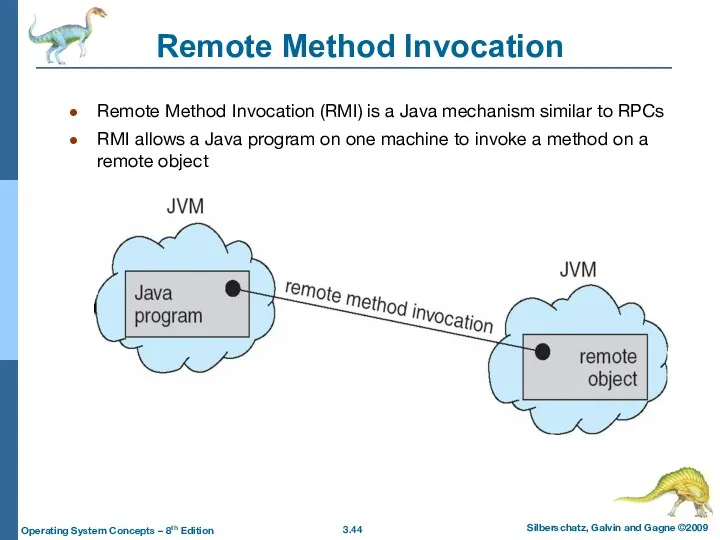
Remote Method Invocation
Remote Method Invocation (RMI) is a Java mechanism similar
Remote Method Invocation
Remote Method Invocation (RMI) is a Java mechanism similar
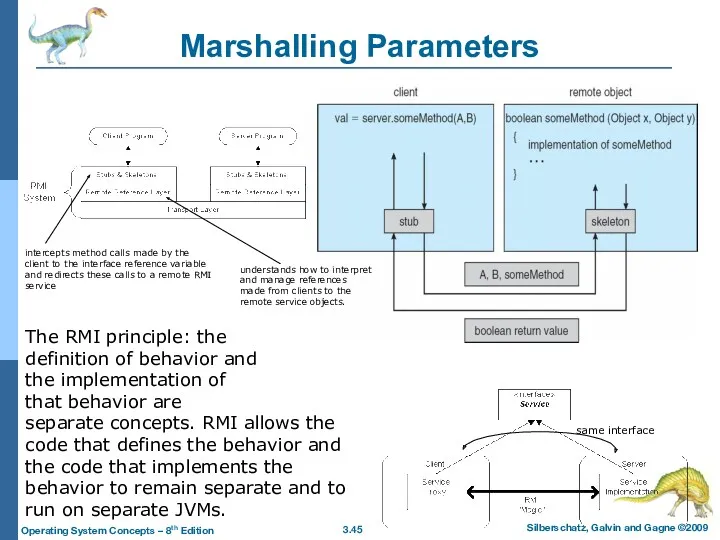
Marshalling Parameters
The RMI principle: the
definition of behavior and
the implementation
Marshalling Parameters
The RMI principle: the definition of behavior and the implementation
 Единицы измерения информации
Единицы измерения информации Базы данных. СУБД. Модели представления данных
Базы данных. СУБД. Модели представления данных AP-GS1002 WEB. Setup Guide Eng
AP-GS1002 WEB. Setup Guide Eng Updating software
Updating software Installation peripherals. Verifying
Installation peripherals. Verifying Сортировка массива. Метод пузырька.
Сортировка массива. Метод пузырька. Компания Century Star Media Co
Компания Century Star Media Co Антивирус Касперского
Антивирус Касперского Поисковая система
Поисковая система Oracle Application Express 5.1
Oracle Application Express 5.1 Application Server 2017
Application Server 2017 Безопасность будущего (кибербезопасность)
Безопасность будущего (кибербезопасность) High Performance Deep Learning on Intel Architecture
High Performance Deep Learning on Intel Architecture Аппаратное обеспечение для подключения к сети интернет
Аппаратное обеспечение для подключения к сети интернет Архитектуры ИС на основе технологии Intranet и распределенные ИС
Архитектуры ИС на основе технологии Intranet и распределенные ИС Пушкинский городской округ. Мобильное приложение
Пушкинский городской округ. Мобильное приложение Кибернетическая модель управления
Кибернетическая модель управления Eva-приложение для оценки объектов недвижимости. Преимущества системы Eva, выгоды
Eva-приложение для оценки объектов недвижимости. Преимущества системы Eva, выгоды Виртуальный батл. Конкурс Разминка
Виртуальный батл. Конкурс Разминка Единицы измерения информации. Алфавитный подход к измерению информации
Единицы измерения информации. Алфавитный подход к измерению информации Принципы геолого-технологического моделирования (построение структурно-стратиграфического каркаса и трехмерной сетки (3D-грида)
Принципы геолого-технологического моделирования (построение структурно-стратиграфического каркаса и трехмерной сетки (3D-грида) Электронный бизнес
Электронный бизнес IMS3/UniteCM Settings IMS3 IP Address Used for messaging
IMS3/UniteCM Settings IMS3 IP Address Used for messaging Полиморфизм
Полиморфизм Компьютерлік желілердің классификациясы
Компьютерлік желілердің классификациясы час звена Психоактивные вещества
час звена Психоактивные вещества Презентация
Презентация Проблема безопасности детей в медийном пространстве
Проблема безопасности детей в медийном пространстве