- Оптимизация нелинейных систем

Содержание
- 3. Если в математической модели оптимизационной задачи имеются нелинейные зависимости, для решения этой задачи используются методы нелинейного
- 4. Метод с постоянным шагом Метод покоординатного спуска Метод скорейшего спуска Градиентные методы
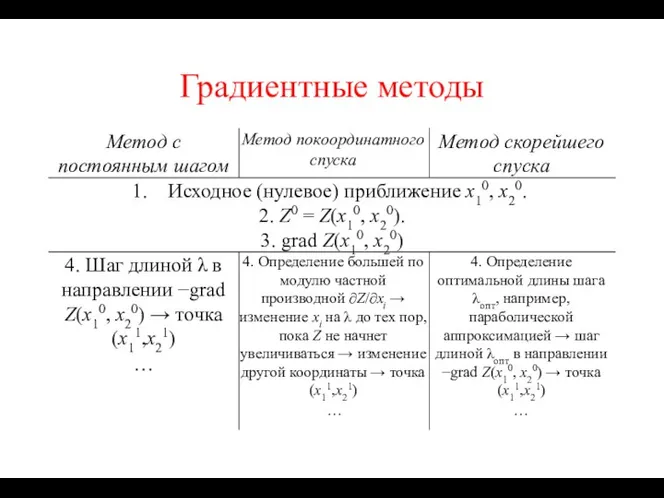
- 5. Метод с постоянным шагом Метод покоординатного спуска Метод скорейшего спуска Градиентные методы Исходное (нулевое) приближение x10,
- 6. В результате вычислительного процесса последовательно осуществляется «спуск» к минимуму функции Z. Вычислительная процедура заканчивается, когда относительное
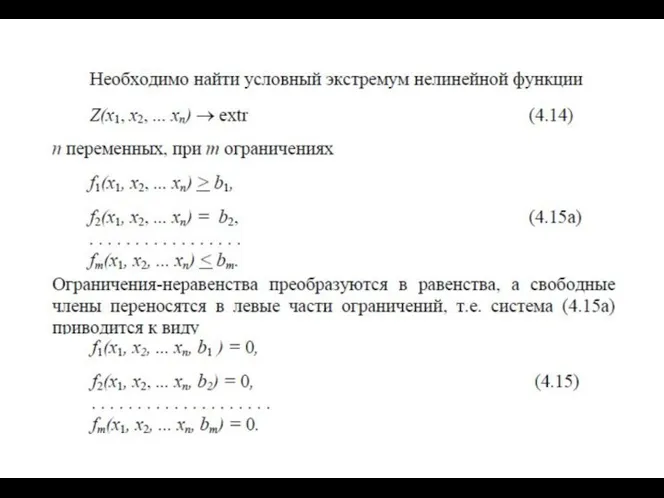
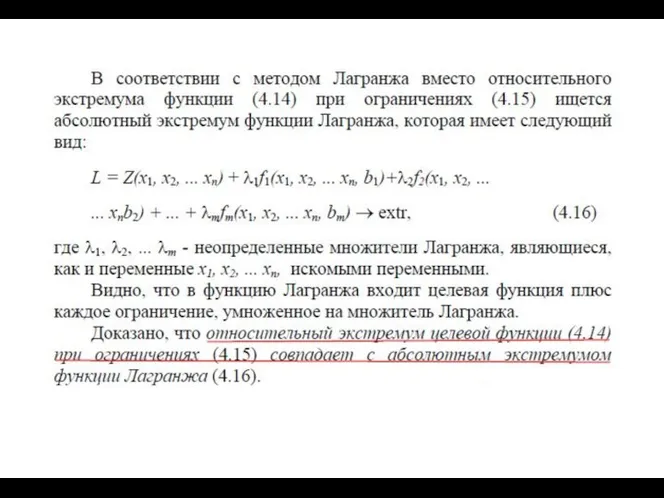
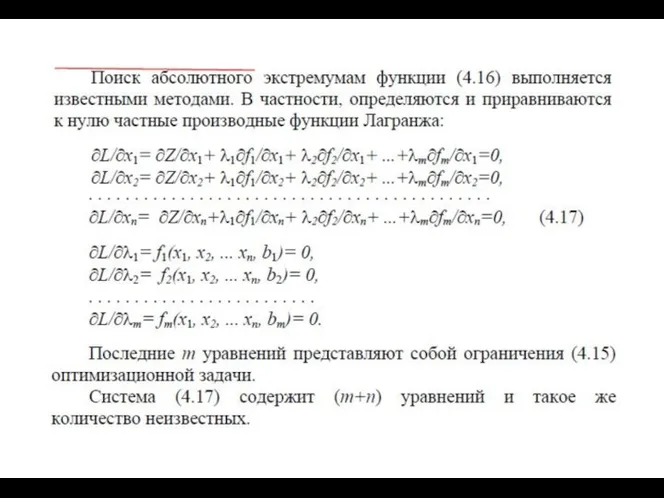
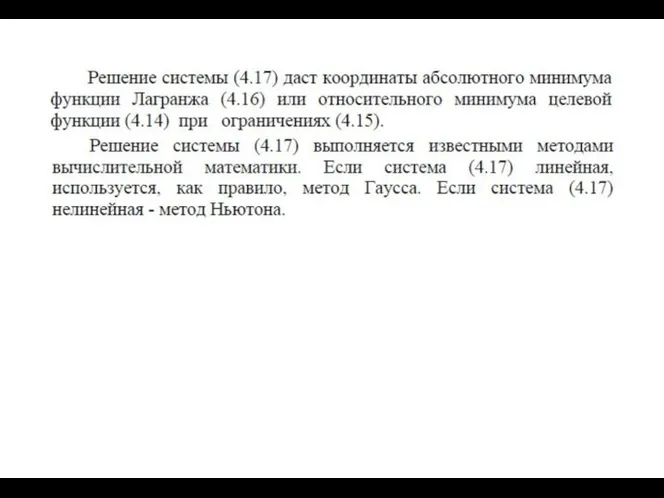
- 7. Метод множителей Лагранжа
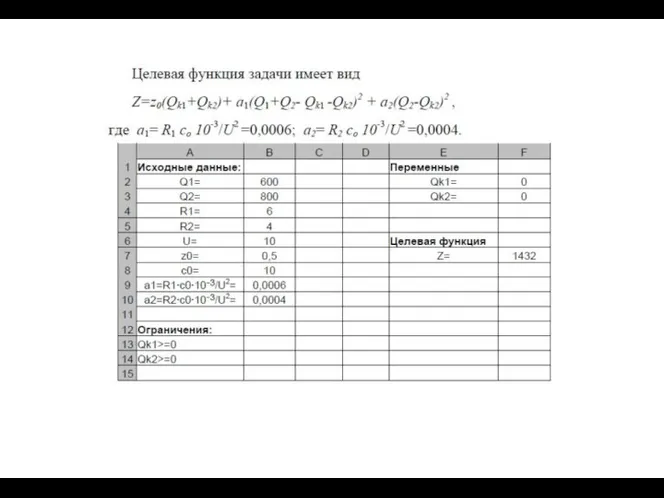
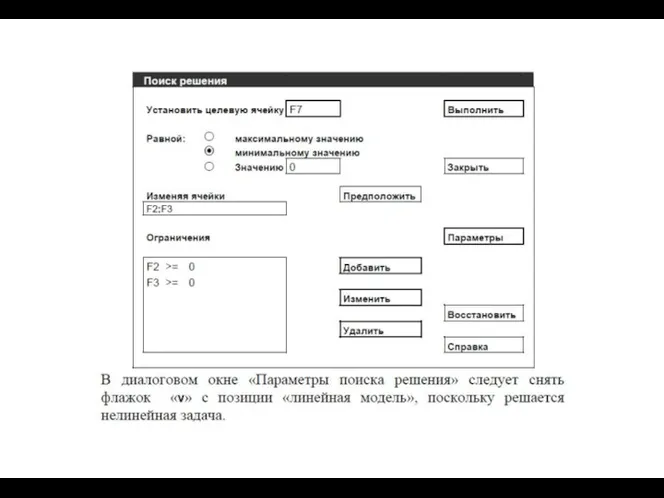
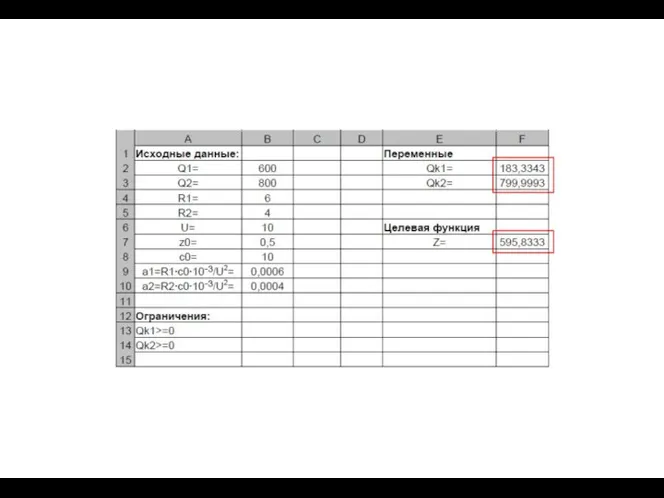
- 12. Решение задач нелинейного программирования в EXCEL
- 17. Скачать презентацию
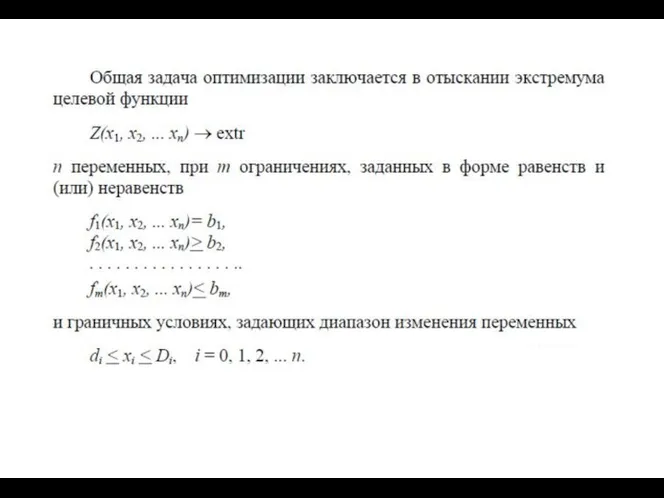
Если в математической модели оптимизационной задачи имеются нелинейные зависимости, для решения
Если в математической модели оптимизационной задачи имеются нелинейные зависимости, для решения
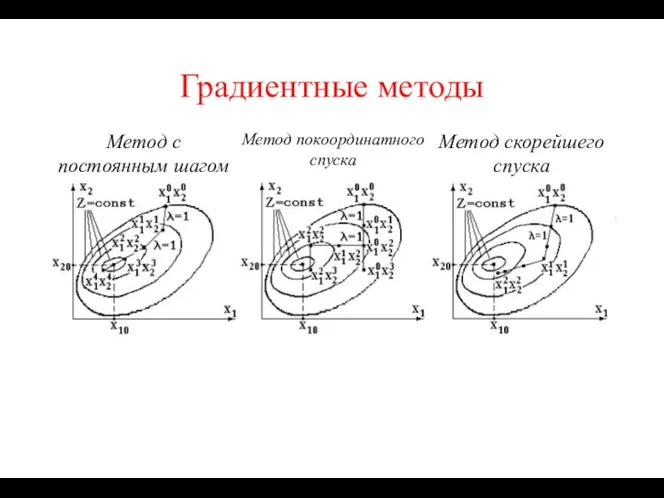
Метод с постоянным шагом
Метод покоординатного спуска
Метод скорейшего спуска
Градиентные методы
Метод с постоянным шагом
Метод покоординатного спуска
Метод скорейшего спуска
Градиентные методы
Метод с постоянным шагом
Метод покоординатного спуска
Метод скорейшего спуска
Градиентные методы
Исходное (нулевое) приближение
Метод с постоянным шагом
Метод покоординатного спуска
Метод скорейшего спуска
Градиентные методы
Исходное (нулевое) приближение
В результате вычислительного процесса последовательно осуществляется «спуск» к минимуму функции Z.
В результате вычислительного процесса последовательно осуществляется «спуск» к минимуму функции Z.
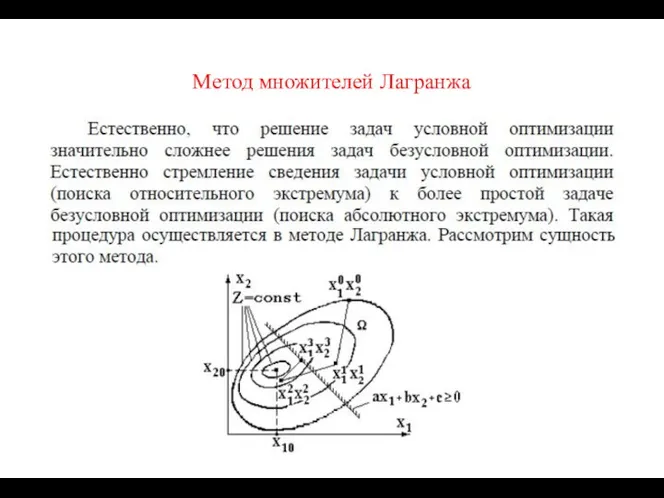
Метод множителей Лагранжа
Метод множителей Лагранжа
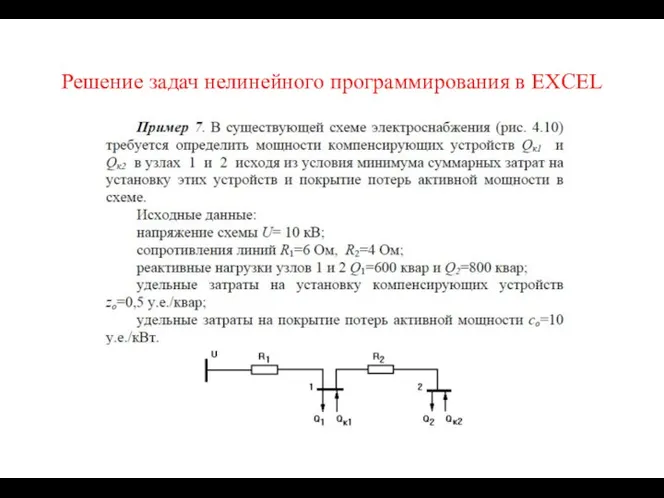
Решение задач нелинейного программирования в EXCEL
Решение задач нелинейного программирования в EXCEL
 Управление периодической печати, книгоиздания и полиграфии
Управление периодической печати, книгоиздания и полиграфии Веб-программирование
Веб-программирование Кодирование информации. История способов кодирования
Кодирование информации. История способов кодирования Криптографические методы защиты информации
Криптографические методы защиты информации Введение в PHP
Введение в PHP Стандарт OpenMP. Лекция 3
Стандарт OpenMP. Лекция 3 Проектирование и разработка информационных систем. (Лекции 14, 15)
Проектирование и разработка информационных систем. (Лекции 14, 15) Виртуальные машины. Алгоритмы установки ОС
Виртуальные машины. Алгоритмы установки ОС Модельдер және модельдеу түрлері
Модельдер және модельдеу түрлері Решения D-Link для построения сетей
Решения D-Link для построения сетей Программирование на языке Паскаль
Программирование на языке Паскаль Поиск информации в интернете
Поиск информации в интернете Эволюция информационных технологий
Эволюция информационных технологий Персональные данные (для детей 9-11 лет)
Персональные данные (для детей 9-11 лет) Компьютер как средство автоматизации информационных процессов.
Компьютер как средство автоматизации информационных процессов. Интерактивная программа: Единая промышленная карта
Интерактивная программа: Единая промышленная карта Серверные операционные системы
Серверные операционные системы Радио телевидение и веб-камеры в интернете
Радио телевидение и веб-камеры в интернете Многообразие схем. Информационные модели на графах. Использование графов при решении задач
Многообразие схем. Информационные модели на графах. Использование графов при решении задач ЭВМ пятого поколения
ЭВМ пятого поколения Видатні інформатики світу
Видатні інформатики світу Технология разработки программных продуктов (1)
Технология разработки программных продуктов (1) Обработка исключений
Обработка исключений Контент для В2В и В2С
Контент для В2В и В2С Риски сбоя в КС. Определения. Переключательный процесс. Гонки по входу. Статические, динамические и функциональные риски сбоя
Риски сбоя в КС. Определения. Переключательный процесс. Гонки по входу. Статические, динамические и функциональные риски сбоя Разработка предложений по идентификации пользователей при обеспечении защиты информации в компании Мосинжпроект
Разработка предложений по идентификации пользователей при обеспечении защиты информации в компании Мосинжпроект Анализ информации, представленной в виде схем
Анализ информации, представленной в виде схем Вёрстка и дизайн газетной статьи
Вёрстка и дизайн газетной статьи