- Позиционирование объекта в закрытом пространстве

Содержание
- 2. Актуальность Использование систем позиционирования людей и материальных объектов - одно из актуальных направлений совершенствования технологических и
- 4. Цель Исследовать существующие системы позиционирования объектов. Построить устройство для позиционирования объектов в закрытом пространстве. Написать программное
- 5. Научная новизна Архитектура программно-аппаратного комплекса для получения координат объекта в замкнутом пространстве.
- 6. Пракическая ценность В будущем это изобретение можно использовать для роботов-миноискателей в помещениях с большим количеством людей.
- 7. Существующие способы позиционирования радиочастотные технологии (точность 1 - 4 метра) спутниковые технологии навигации (GPS, ГЛОНАСС точность
- 8. Аналог Ультразвуковой дальномер HC-SR04 Данный дальномер имеет большую точность, то есть 3-10 сантиметров.
- 9. Изобретение Мое изобретение состоит из микроконтроллеров, ультразвуковых дальномеров, радиопередатчик и разработки схемы их расположения, а главное
- 10. Схема работы прибора 1а - радио передатчик 1б - радиоприемник 2А1, 2А2, 2а3 - ультразвуковые датчики
- 11. Сравнение микроконтроллеров
- 12. Компоненты и их цена В своей работе я использовал следующие компоненты: Arduino Nano - 4 $
- 13. Оболочка и язык программирования Язык программирования Arduino является стандартным C ++ (используется компилятор AVR-GCC) с некоторыми
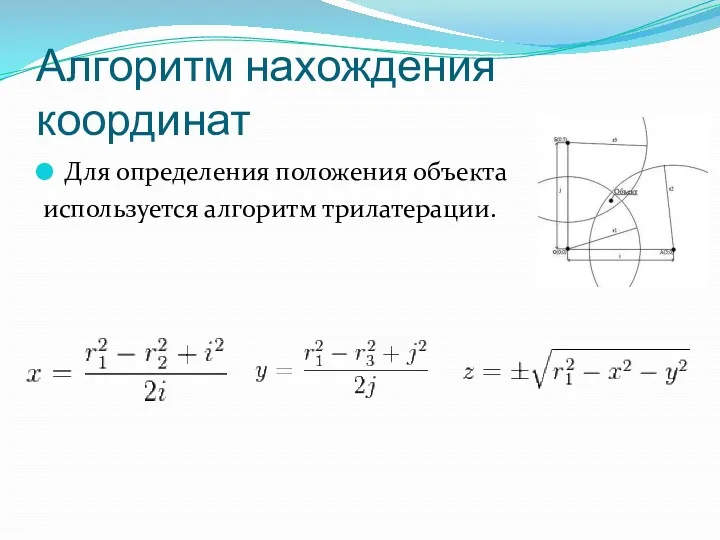
- 14. Алгоритм нахождения координат Для определения положения объекта используется алгоритм трилатерации.
- 15. Модули программы переносного устройства Инициализация переменных Настройка радиоприемника Прием данных от радио передатчика Расчет координат и
- 16. Модули программы стационарного прибора Инициализация переменных Настройка радио передатчика Передача данных к переносному прибору
- 18. Скачать презентацию
Актуальность
Использование систем позиционирования людей и материальных объектов - одно из актуальных
Актуальность
Использование систем позиционирования людей и материальных объектов - одно из актуальных

Цель
Исследовать существующие системы позиционирования объектов.
Построить устройство для позиционирования объектов в закрытом
Цель
Исследовать существующие системы позиционирования объектов.
Построить устройство для позиционирования объектов в закрытом
Научная новизна
Архитектура программно-аппаратного комплекса для получения координат объекта в замкнутом пространстве.
Научная новизна
Архитектура программно-аппаратного комплекса для получения координат объекта в замкнутом пространстве.
Пракическая ценность
В будущем это изобретение можно использовать для роботов-миноискателей в помещениях
Пракическая ценность
В будущем это изобретение можно использовать для роботов-миноискателей в помещениях
Существующие способы позиционирования
радиочастотные технологии (точность 1 - 4 метра)
спутниковые технологии навигации
Существующие способы позиционирования
радиочастотные технологии (точность 1 - 4 метра)
спутниковые технологии навигации

Аналог
Ультразвуковой дальномер HC-SR04
Данный дальномер имеет большую точность, то есть 3-10 сантиметров.
Аналог
Ультразвуковой дальномер HC-SR04
Данный дальномер имеет большую точность, то есть 3-10 сантиметров.
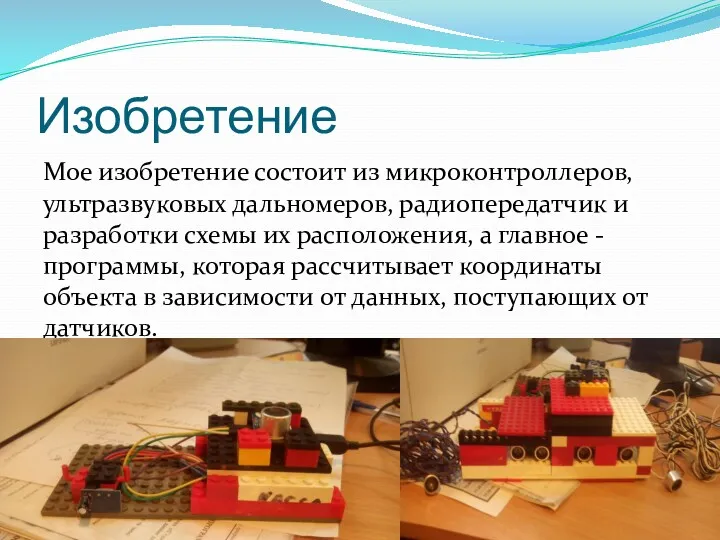
Изобретение
Мое изобретение состоит из микроконтроллеров, ультразвуковых дальномеров, радиопередатчик и разработки схемы
Изобретение
Мое изобретение состоит из микроконтроллеров, ультразвуковых дальномеров, радиопередатчик и разработки схемы

Схема работы прибора
1а - радио передатчик
1б - радиоприемник
2А1, 2А2, 2а3 -
Схема работы прибора
1а - радио передатчик
1б - радиоприемник
2А1, 2А2, 2а3 -
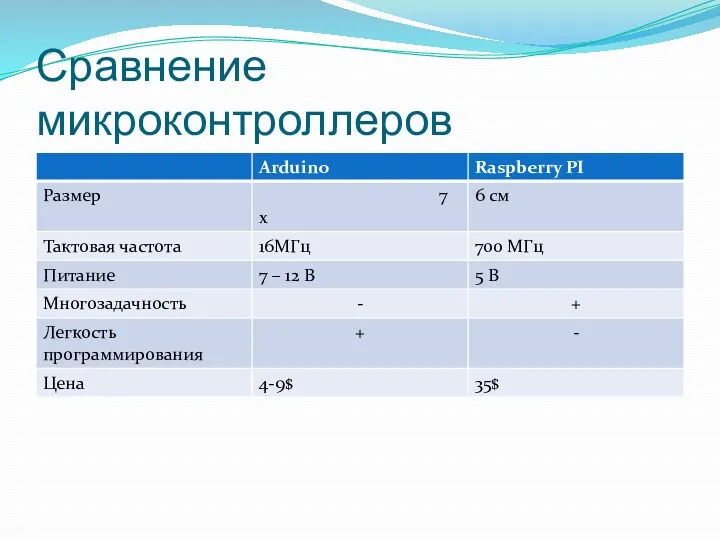
Сравнение микроконтроллеров
Сравнение микроконтроллеров
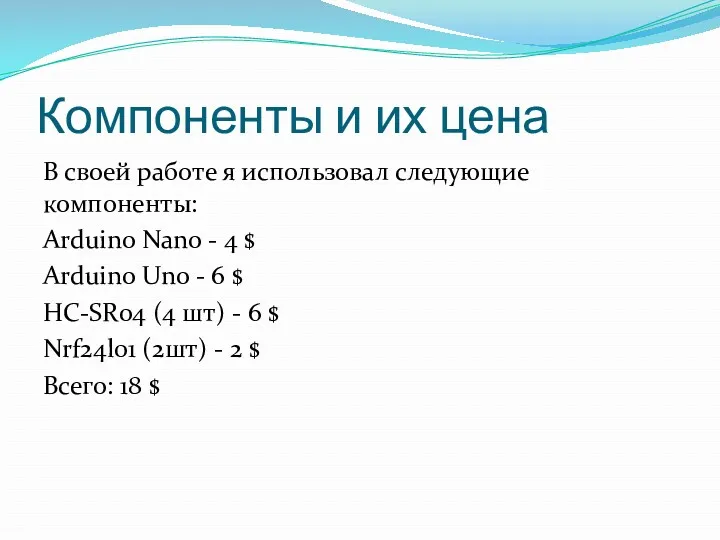
Компоненты и их цена
В своей работе я использовал следующие компоненты:
Arduino Nano
Компоненты и их цена
В своей работе я использовал следующие компоненты:
Arduino Nano
Оболочка и язык программирования
Язык программирования Arduino является стандартным C ++ (используется
Оболочка и язык программирования
Язык программирования Arduino является стандартным C ++ (используется
Алгоритм нахождения
координат
Для определения положения объекта
используется алгоритм трилатерации.
Алгоритм нахождения
координат
Для определения положения объекта
используется алгоритм трилатерации.
Модули программы переносного устройства
Инициализация переменных
Настройка радиоприемника
Прием данных от радио передатчика
Расчет координат
Модули программы переносного устройства
Инициализация переменных
Настройка радиоприемника
Прием данных от радио передатчика
Расчет координат
Модули программы стационарного прибора
Инициализация переменных
Настройка радио передатчика
Передача данных к переносному прибору
Модули программы стационарного прибора
Инициализация переменных
Настройка радио передатчика
Передача данных к переносному прибору
 Инженерный дизайн
Инженерный дизайн Обеспечение безопасности информационных систем
Обеспечение безопасности информационных систем Классификация информационных технологий
Классификация информационных технологий Сети TD-LTE: Перспективы, особенности построения и операторской деятельности в России
Сети TD-LTE: Перспективы, особенности построения и операторской деятельности в России Проектная деятельность на уроках информатики
Проектная деятельность на уроках информатики Презентация Графический метод решения уравнений в Excel
Презентация Графический метод решения уравнений в Excel Создание проектов на Уроках информатики 4-9 класс
Создание проектов на Уроках информатики 4-9 класс Роль 'ников' в Интернете
Роль 'ников' в Интернете Разнообразие. Циклы
Разнообразие. Циклы Creating Functions and Debugging Subprograms
Creating Functions and Debugging Subprograms Программный комплекс Scada система TRACE MODE
Программный комплекс Scada система TRACE MODE Основы HTML Заголовок Заголовок Заголовок Заголовок Заголовок Заголовок Заголовок Пример записи для форматирования: Заголовки Запись элемента в общем виде: Пример: Использование атрибута align: align=left Текст располагается справа align=ri
Основы HTML Заголовок Заголовок Заголовок Заголовок Заголовок Заголовок Заголовок Пример записи для форматирования: Заголовки Запись элемента в общем виде: Пример: Использование атрибута align: align=left Текст располагается справа align=ri Critical Path Research: Getting New Technology from Bench to Bedside A Device. Perspective FDA Science Board November 5, 2004
Critical Path Research: Getting New Technology from Bench to Bedside A Device. Perspective FDA Science Board November 5, 2004 Мобильное приложение-сервис для поиска друзей по интересам и организации мероприятий
Мобильное приложение-сервис для поиска друзей по интересам и организации мероприятий Программирование на Python. Урок 8. Создаем gameplay
Программирование на Python. Урок 8. Создаем gameplay Техника безопасности в компьютерном классе
Техника безопасности в компьютерном классе Справочно-библиографический аппарат библиотеки (СБА)
Справочно-библиографический аппарат библиотеки (СБА) Алгоритмы
Алгоритмы Устройство компьютера. § 32. Принципы устройства компьютеров
Устройство компьютера. § 32. Принципы устройства компьютеров Компоненти і структура IT
Компоненти і структура IT Разработка информационной системы для туристической фирмы
Разработка информационной системы для туристической фирмы Презентация Домашние животные.
Презентация Домашние животные. Возможности динамических (электронных) таблиц. Математическая обработка числовых данных (лекция)
Возможности динамических (электронных) таблиц. Математическая обработка числовых данных (лекция) Основные направления деятельности территориальных избирательных комиссий по подготовке и проведению выборов
Основные направления деятельности территориальных избирательных комиссий по подготовке и проведению выборов Центр Обработки Вызовов Mango Office
Центр Обработки Вызовов Mango Office Структурный макет сайта
Структурный макет сайта Программирование на языке Python. §54. Введение в язык Python
Программирование на языке Python. §54. Введение в язык Python Специфические строительные проекты ООО НПП АВС-Н
Специфические строительные проекты ООО НПП АВС-Н