- Правило правой руки

Содержание
- 2. Правило правой руки Алгоритм Есть ли справа стена? Повернуть направо Вперед Начало Есть ли впереди стена?
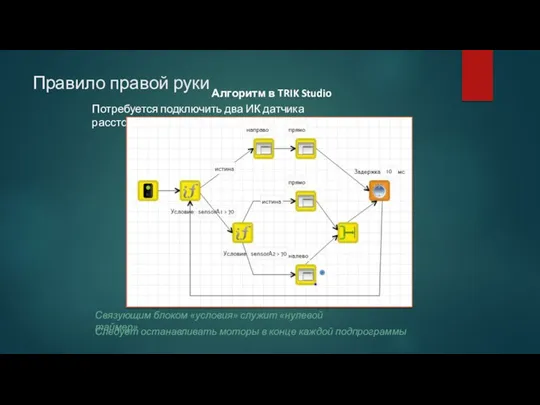
- 3. Правило правой руки Алгоритм в TRIK Studio Потребуется подключить два ИК датчика расстояния Связующим блоком «условия»
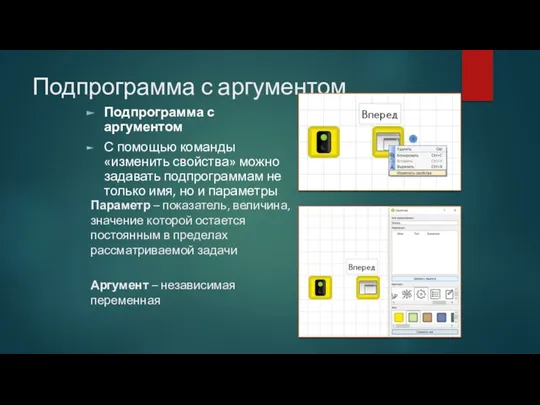
- 4. Подпрограмма с аргументом Подпрограмма с аргументом С помощью команды «изменить свойства» можно задавать подпрограммам не только
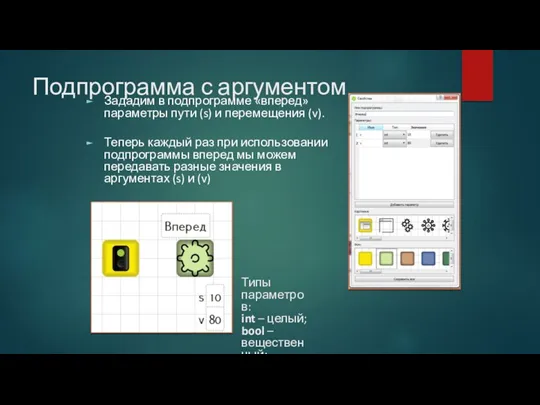
- 5. Подпрограмма с аргументом Зададим в подпрограмме «вперед» параметры пути (s) и перемещения (v). Теперь каждый раз
- 6. Задача для самостоятельного решения 2: реализуйте разгон в течение 3х секунд и торможение в течение 2ух.
- 8. Скачать презентацию

Правило правой руки
Алгоритм
Есть ли справа стена?
Повернуть направо
Вперед
Начало
Есть ли впереди стена?
Вперед
Повернуть налево
ожидание
нет
нет
да
да
Правило правой руки
Алгоритм
Есть ли справа стена?
Повернуть направо
Вперед
Начало
Есть ли впереди стена?
Вперед
Повернуть налево
ожидание
нет
нет
да
да
Правило правой руки
Алгоритм в TRIK Studio
Потребуется подключить два ИК датчика расстояния
Связующим
Правило правой руки
Алгоритм в TRIK Studio
Потребуется подключить два ИК датчика расстояния
Связующим
Подпрограмма с аргументом
Подпрограмма с аргументом
С помощью команды «изменить свойства»
Подпрограмма с аргументом
Подпрограмма с аргументом
С помощью команды «изменить свойства»
Подпрограмма с аргументом
Зададим в подпрограмме «вперед» параметры пути (s) и
Подпрограмма с аргументом
Зададим в подпрограмме «вперед» параметры пути (s) и
Задача для самостоятельного решения 2: реализуйте разгон в течение 3х секунд
Задача для самостоятельного решения 2: реализуйте разгон в течение 3х секунд
 Структура программного обеспечения компьютера
Структура программного обеспечения компьютера Электронные таблицы. Обработка числовой информации в электронных таблицах
Электронные таблицы. Обработка числовой информации в электронных таблицах Системы счисления
Системы счисления Компьютерные сети, часть 1
Компьютерные сети, часть 1 Load testing with Visual Studio Enterprise 2015
Load testing with Visual Studio Enterprise 2015 Сообщество ВКонтакте: Мульты Disney
Сообщество ВКонтакте: Мульты Disney Потоки и процессы
Потоки и процессы Открытый урок Общие сведения по информатике
Открытый урок Общие сведения по информатике Штучний інтелект: міфи і реальність
Штучний інтелект: міфи і реальність Разработка информационной системы с элементами анализа данных для автомастерской
Разработка информационной системы с элементами анализа данных для автомастерской Системы и модели
Системы и модели Современная структура и динамика медиасистемы
Современная структура и динамика медиасистемы Поддержка моделирования объектов автоматизации. Современные стандарты описания и исполнения бизнес-процессов
Поддержка моделирования объектов автоматизации. Современные стандарты описания и исполнения бизнес-процессов Библиографическое описание документов. Правила оформления
Библиографическое описание документов. Правила оформления Система программирования Basic-256. Операция присваивания. Ввод и вывод данных.
Система программирования Basic-256. Операция присваивания. Ввод и вывод данных. Логические основы построения ЭВМ
Логические основы построения ЭВМ Ресурсный центр Открытая библиотека
Ресурсный центр Открытая библиотека ПЯВУ. Основы программирования. Лекция 14. Решение системы уравнений методом Гаусса. Вычисление числа Пи методом “МонтеКарло”
ПЯВУ. Основы программирования. Лекция 14. Решение системы уравнений методом Гаусса. Вычисление числа Пи методом “МонтеКарло” Исполнитель Чертежник. Вспомогательные алгоритмы
Исполнитель Чертежник. Вспомогательные алгоритмы Основы информационной безопасности. Практическая работа 2. Основы криптографии
Основы информационной безопасности. Практическая работа 2. Основы криптографии Реализация логических операций в компьютере
Реализация логических операций в компьютере Подсистема защиты для автоматизированной системы Учет научных работ сотрудников учебного учреждения
Подсистема защиты для автоматизированной системы Учет научных работ сотрудников учебного учреждения презентация Устройства ПК
презентация Устройства ПК Программирование (Python). §19. Ветвления
Программирование (Python). §19. Ветвления Медіа-освіта: електронні засоби навчання
Медіа-освіта: електронні засоби навчання SMM для start-up
SMM для start-up Мастер класс Как сделать скриншоты для презентации
Мастер класс Как сделать скриншоты для презентации Использование мобильного приложения Наблюдатель Единой России и передача сведений с участковых избирательных комиссий
Использование мобильного приложения Наблюдатель Единой России и передача сведений с участковых избирательных комиссий