- Принципы управления, построения и алгоритмы функционирования элементов САУ и СА

Содержание
- 2. [1]. Коновалов Г.Ф. Радиоавтоматика: Учебник для вузов. – М.: Радио и связь, 1992. [2]. Лайков М.И.
- 3. Автоматика- отрасль науки и техники, охватывающая теорию и принципы построения средств и систем автоматического управления (САУ)
- 4. Центробежный регулятор скорости вращения махового колеса паровой машины
- 5. Автоматизации деятельности ГА по следующим основным направлениям: 1. Разработка и внедрения бортовых пилотажно-навигационных комплексов, предназначенных для
- 6. Управление креном ВС: а – ручное; б – автоматическое. Системы полуавтоматическая управления: а – автоматизированное управление
- 7. Если функции всех элементов системы управления выполняются различными устройствами без непосредственного участия человека, то система управления
- 8. Системой называется любой физический объект или совокупность объектов, состояние которых в каждый данный момент времени может
- 9. Структурная схема системы управления
- 10. - функционал качества Задача стабилизации
- 11. Задача программного управления
- 12. Задача слежения
- 13. Регулирование по возмущению
- 14. Регулирование по отклонению
- 15. Комбинированная система
- 16. Структура регулятора
- 17. Способ (принцип) управления Разомкнутые, на входе УУ отсутствует информация о действительном значении выходной величины у, т.е
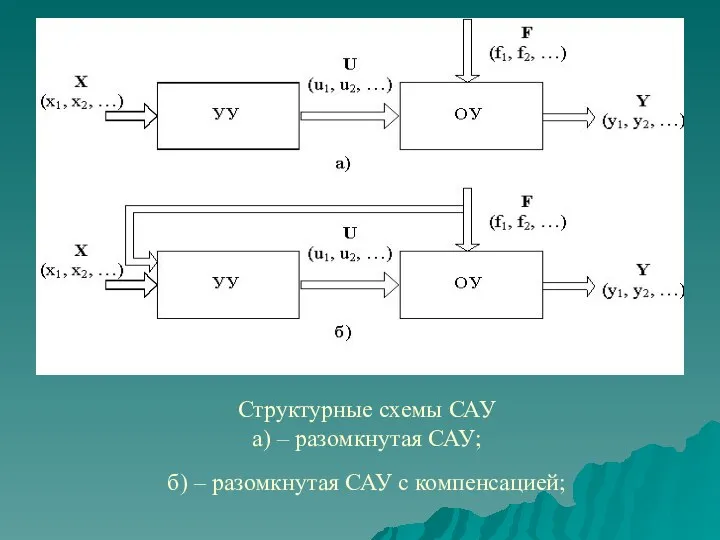
- 18. Структурные схемы САУ а) – разомкнутая САУ; б) – разомкнутая САУ с компенсацией;
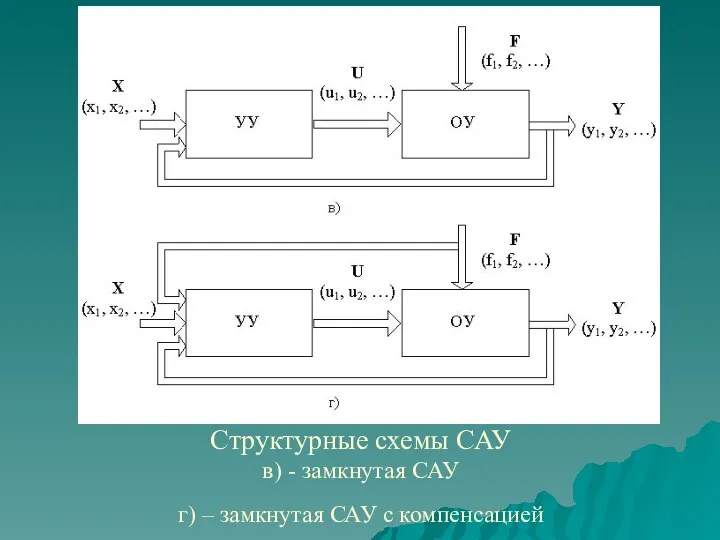
- 19. Структурные схемы САУ в) - замкнутая САУ г) – замкнутая САУ с компенсацией
- 20. Тема №2 Методы математического описания линейных непрерывных стационарных САУ
- 21. Статический режим
- 22. Динамический режим САУ
- 23. Линеаризация уравнений Процедура линеаризации заключается в замене нелинейного дифференциального уравнения приближенным линейным Геометрическая интерпретация линеаризации
- 25. Скачать презентацию
![[1]. Коновалов Г.Ф. Радиоавтоматика: Учебник для вузов. – М.: Радио](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/319707/slide-1.jpg)
[1]. Коновалов Г.Ф. Радиоавтоматика: Учебник для вузов. – М.: Радио и

Автоматика- отрасль науки и техники, охватывающая теорию и принципы построения средств
Автоматика- отрасль науки и техники, охватывающая теорию и принципы построения средств
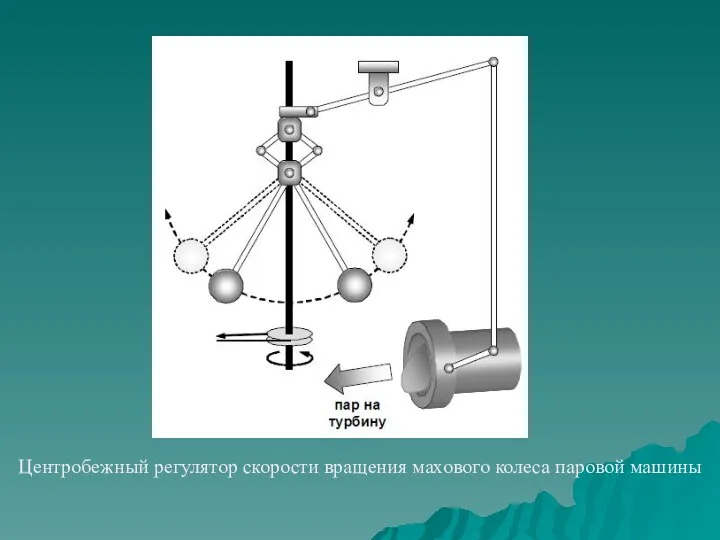
Центробежный регулятор скорости вращения махового колеса паровой машины
Центробежный регулятор скорости вращения махового колеса паровой машины
Автоматизации деятельности ГА по следующим основным направлениям:
1. Разработка и внедрения бортовых
Автоматизации деятельности ГА по следующим основным направлениям:
1. Разработка и внедрения бортовых
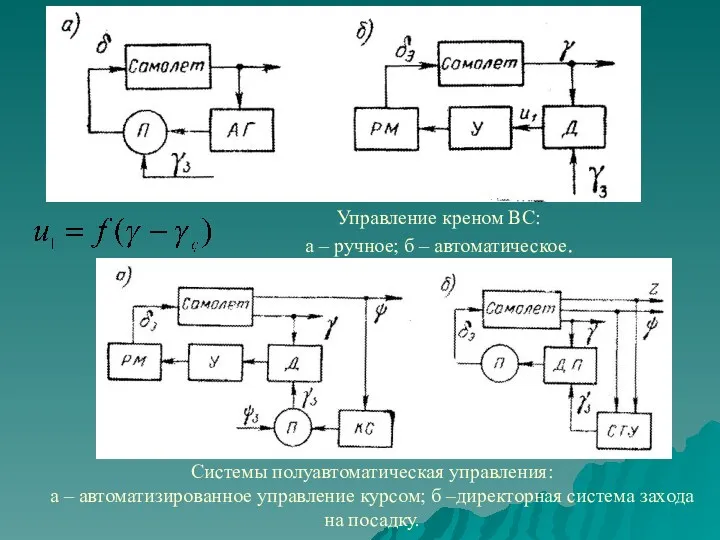
Управление креном ВС:
а – ручное; б – автоматическое.
Системы полуавтоматическая управления:
а –
Управление креном ВС:
а – ручное; б – автоматическое.
Системы полуавтоматическая управления: а –
Если функции всех элементов системы управления выполняются различными устройствами без непосредственного
Если функции всех элементов системы управления выполняются различными устройствами без непосредственного
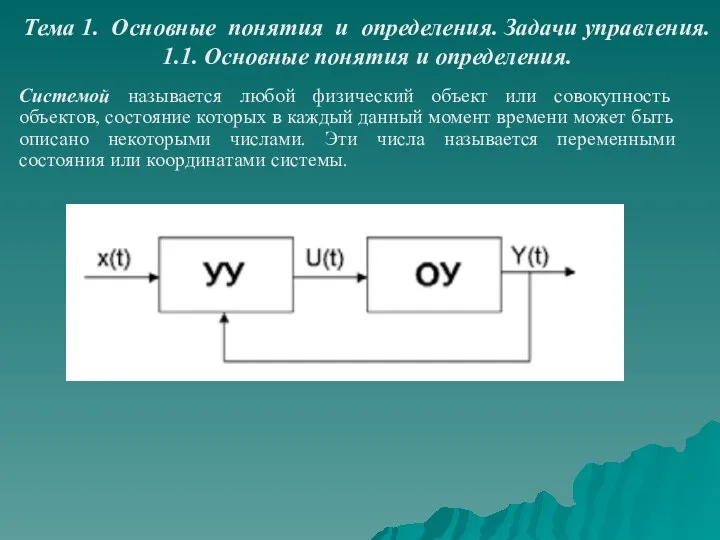
Системой называется любой физический объект или совокупность объектов, состояние которых в
Системой называется любой физический объект или совокупность объектов, состояние которых в
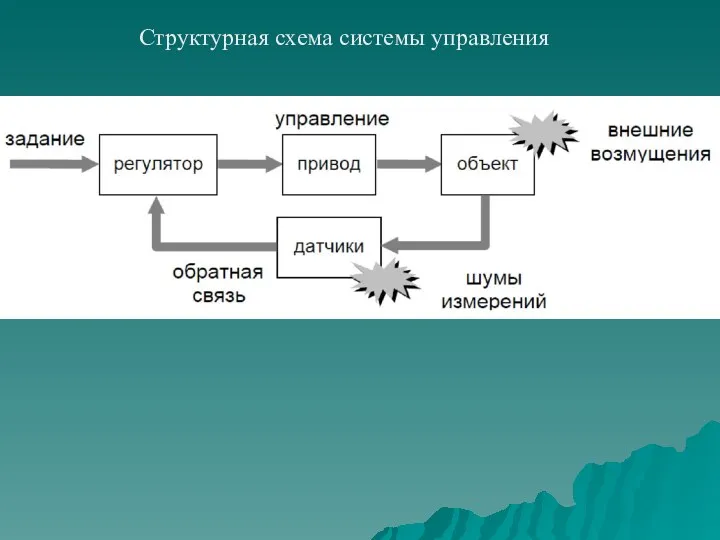
Структурная схема системы управления
Структурная схема системы управления
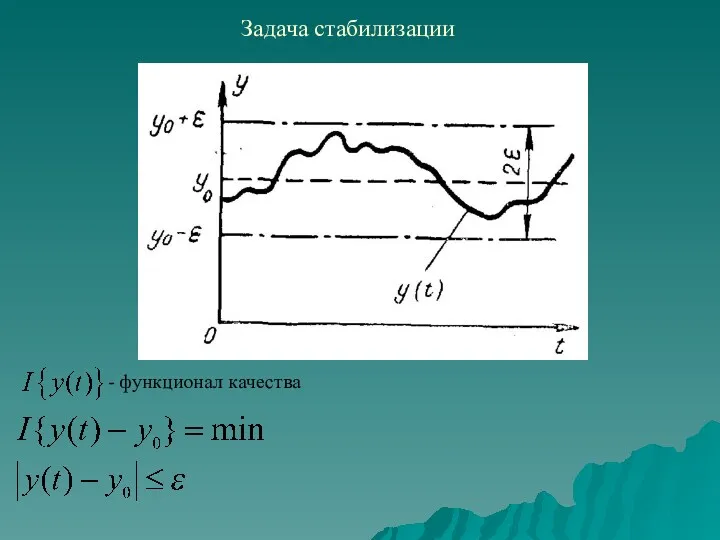
- функционал качества
Задача стабилизации
- функционал качества
Задача стабилизации
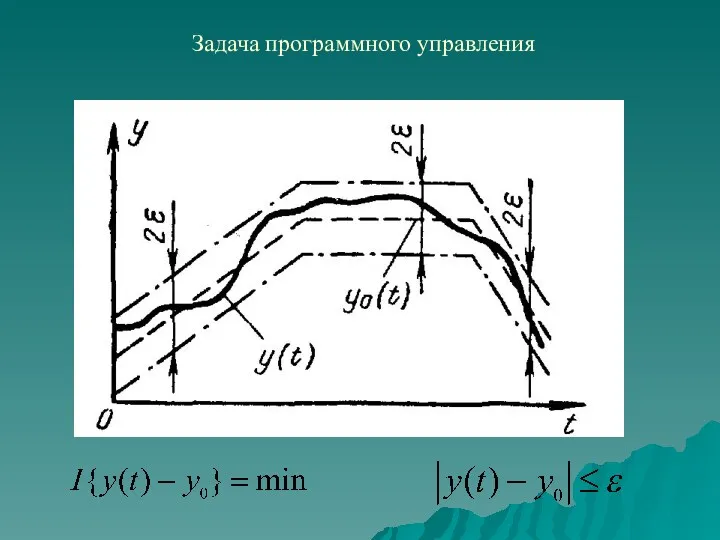
Задача программного управления
Задача программного управления
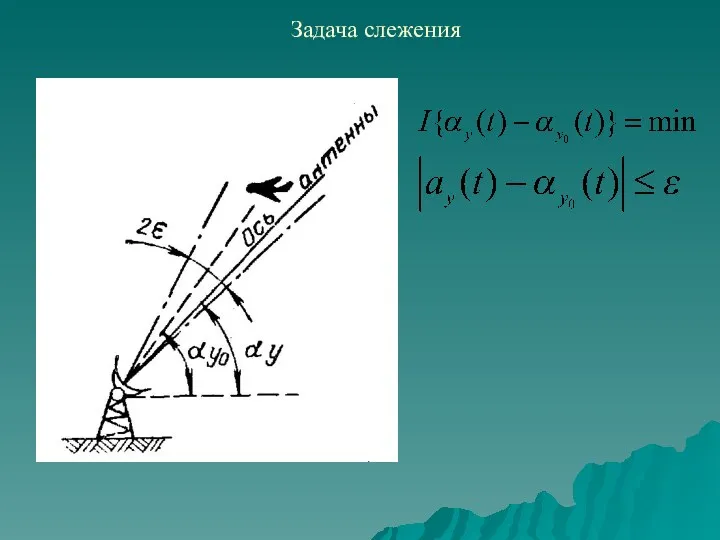
Задача слежения
Задача слежения
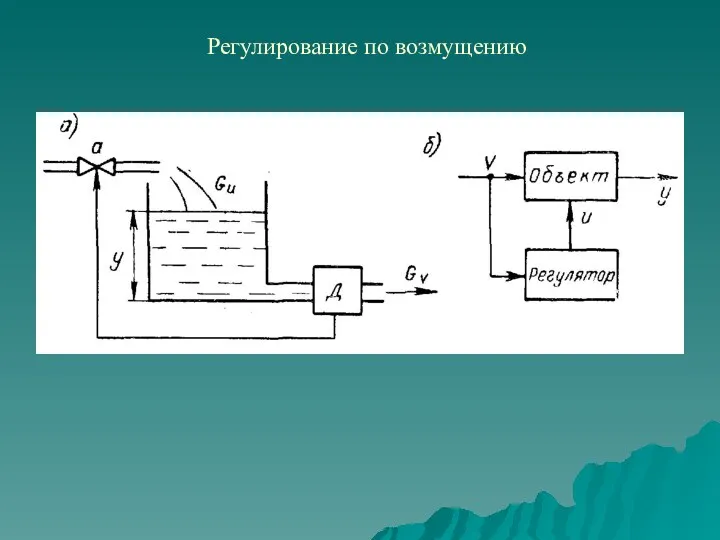
Регулирование по возмущению
Регулирование по возмущению
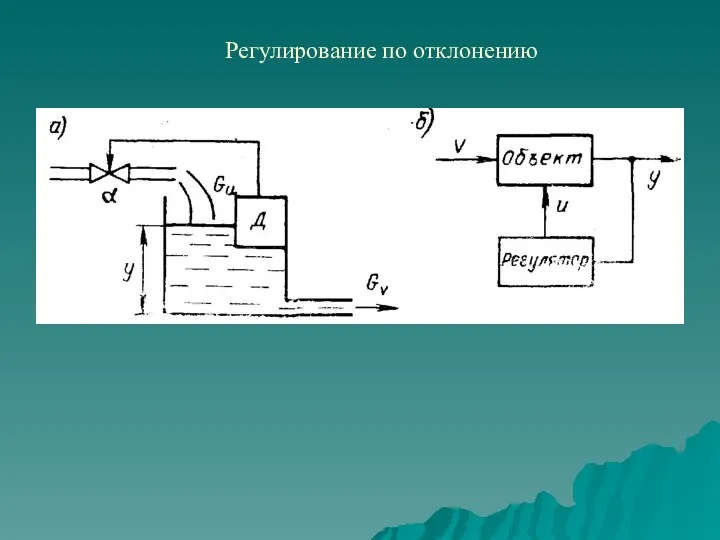
Регулирование по отклонению
Регулирование по отклонению
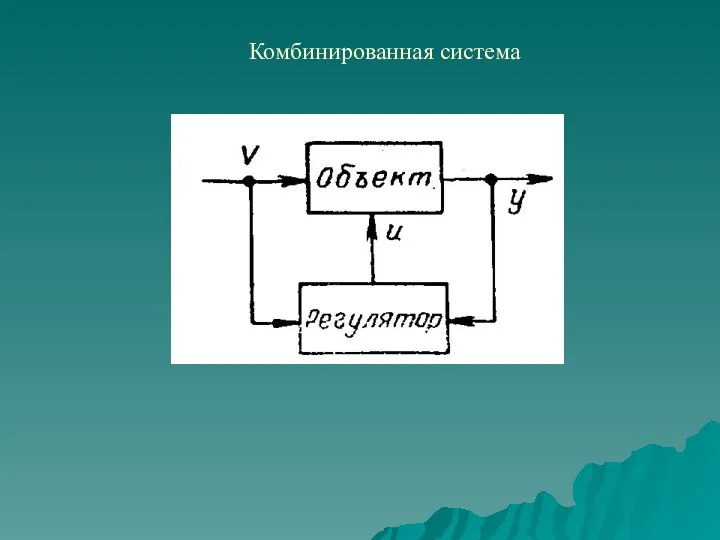
Комбинированная система
Комбинированная система
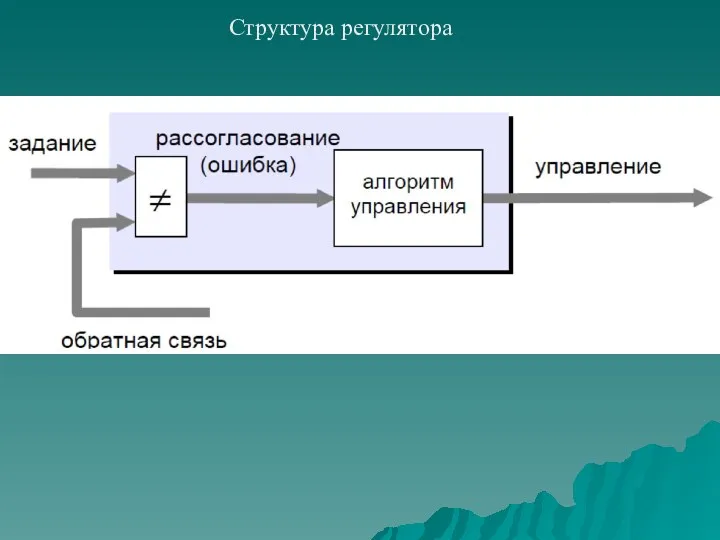
Структура регулятора
Структура регулятора
Способ (принцип) управления
Разомкнутые, на входе УУ отсутствует информация о действительном значении
Способ (принцип) управления
Разомкнутые, на входе УУ отсутствует информация о действительном значении
Структурные схемы САУ
а) – разомкнутая САУ;
б) – разомкнутая САУ с компенсацией;
Структурные схемы САУ а) – разомкнутая САУ; б) – разомкнутая САУ с компенсацией;
Структурные схемы САУ
в) - замкнутая САУ
г) – замкнутая САУ с компенсацией
Структурные схемы САУ в) - замкнутая САУ г) – замкнутая САУ с компенсацией
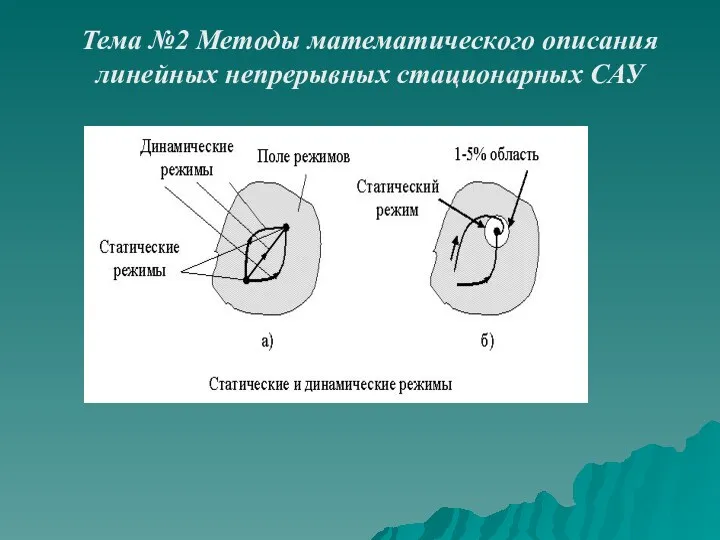
Тема №2 Методы математического описания линейных непрерывных стационарных САУ
Тема №2 Методы математического описания линейных непрерывных стационарных САУ
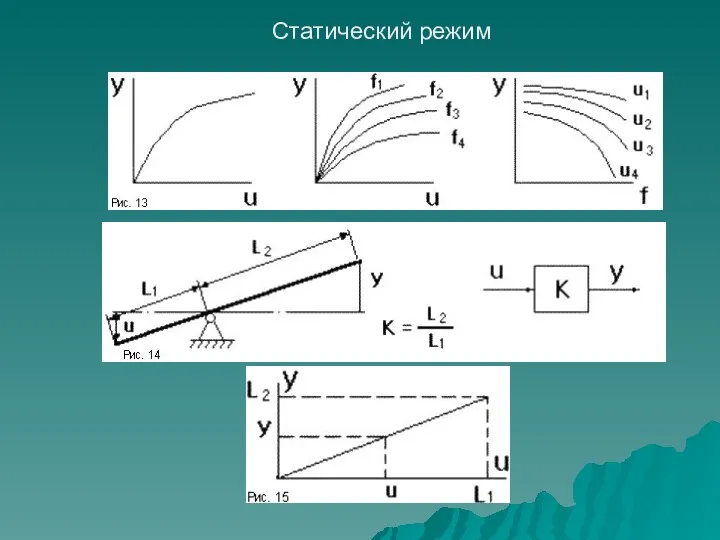
Статический режим
Статический режим
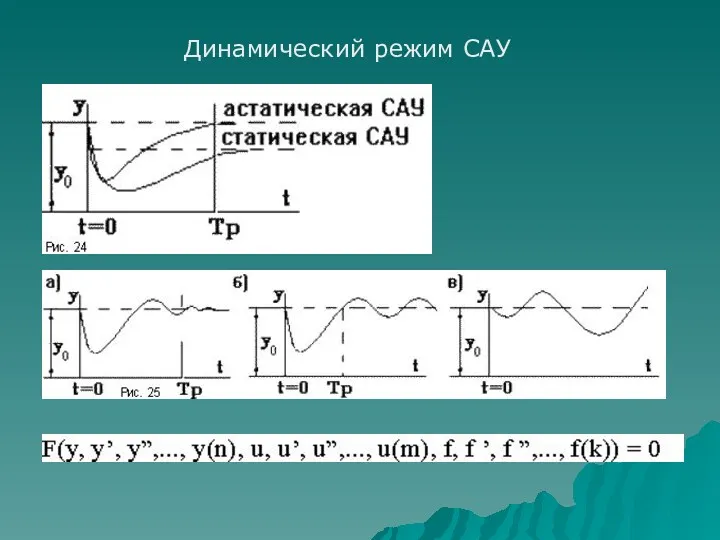
Динамический режим САУ
Динамический режим САУ
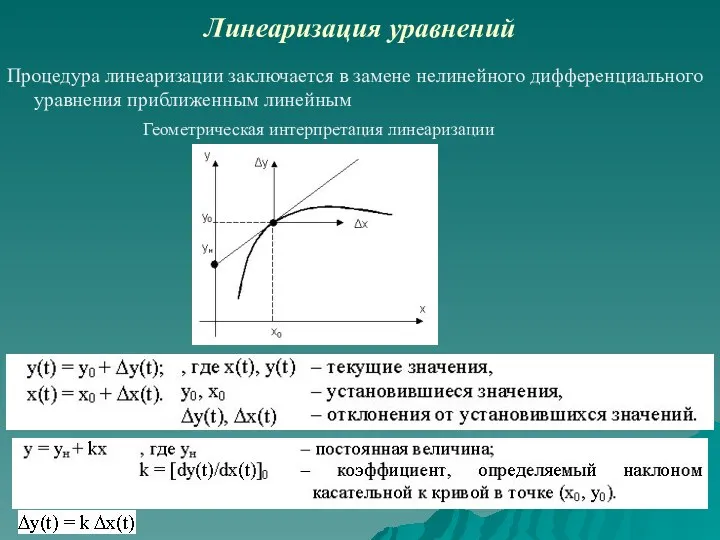
Линеаризация уравнений
Процедура линеаризации заключается в замене нелинейного дифференциального уравнения приближенным линейным
Линеаризация уравнений
Процедура линеаризации заключается в замене нелинейного дифференциального уравнения приближенным линейным
 Решение задач с использованием файлов
Решение задач с использованием файлов Настройка трансляции сетевых адресов (NAT) в ОС Linux
Настройка трансляции сетевых адресов (NAT) в ОС Linux Как создать свой сайт?
Как создать свой сайт? Табличное представление информации
Табличное представление информации Безопасный интернет
Безопасный интернет КВН-урок
КВН-урок Профессия программист
Профессия программист Network Security. Essentials. Chapter 1
Network Security. Essentials. Chapter 1 Использование 3D для обогащения опыта пользователя в ПО
Использование 3D для обогащения опыта пользователя в ПО Объектно-ориентированное программирование. Практическое занятие №1. Введение в язык С++
Объектно-ориентированное программирование. Практическое занятие №1. Введение в язык С++ Устройство компьютера (кроссворд)
Устройство компьютера (кроссворд) Компьютер. Процессор и память
Компьютер. Процессор и память Базы данных
Базы данных Java Puzzlers
Java Puzzlers Інформаційна система обліку матеріалів складу технічного обладнання Хлібокомбінату
Інформаційна система обліку матеріалів складу технічного обладнання Хлібокомбінату Количество информации
Количество информации Функциональные модули сетей SDH
Функциональные модули сетей SDH Организация ввода и вывода данных. Начала программирования
Организация ввода и вывода данных. Начала программирования Технологии программирования
Технологии программирования Использование информационных технологий на уроках математики
Использование информационных технологий на уроках математики Общие сведения о языке С++. Лекция 2.1
Общие сведения о языке С++. Лекция 2.1 Основы программирования ФИСТ. Двухмерные массивы. Базовые алгоритмы. Лекция 10
Основы программирования ФИСТ. Двухмерные массивы. Базовые алгоритмы. Лекция 10 Правила безпечної роботи в Інтернеті
Правила безпечної роботи в Інтернеті Ақпарат. Оның түрлері және қасиеттері
Ақпарат. Оның түрлері және қасиеттері TRACE MODE 5 Интегрированная SCADA/HMI и SoftLogic-система
TRACE MODE 5 Интегрированная SCADA/HMI и SoftLogic-система Развития ПО для автоматизации бизнес - процессов
Развития ПО для автоматизации бизнес - процессов Презентация по теме Технологии программирования
Презентация по теме Технологии программирования Двумерные массивы. Введение.
Двумерные массивы. Введение.