- Работа с динамической памятью

Содержание
- 2. Адресная функция Векторная память поддерживается почти всеми языками высокого уровня и предназначена для хранения массивов различной
- 3. Адресная функция Тогда справедливо следующее: A(i, j) ↔ B(K(i, j)) = B(N1), B – одномерный массив
- 4. Адресная функция Аналогично получаем адресную функцию для трехмерного массива Х(n1, n2, n3): K(i, j, k) =
- 5. Работа с динамической памятью Указатели чаще всего используют при работе с динамической памятью, которую иногда называют
- 6. Библиотечные функции Функции для манипулирования динамической памятью в стандарте Си void *calloc(unsigned n, unsigned size); –
- 7. Динамический массив В языке Си размерность массива при объявлении должна задаваться константным выражением. Если до выполнения
- 8. Динамический массив Обращение к элементу динамического массива осуществляется так же, как и к элементу обычного –
- 9. Динамический массив #include void main() { double *x; int n; printf("\nВведите размер массива – "); scanf("%d",
- 11. Скачать презентацию
Адресная функция
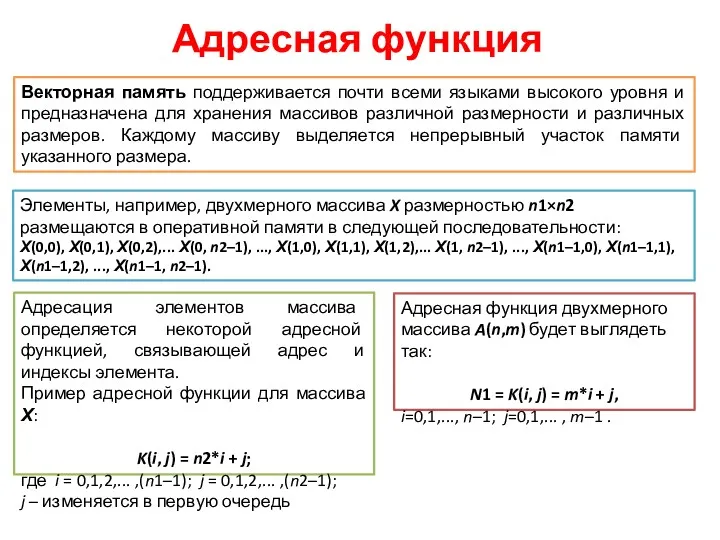
Векторная память поддерживается почти всеми языками высокого уровня и предназначена
Адресная функция
Векторная память поддерживается почти всеми языками высокого уровня и предназначена
Адресная функция
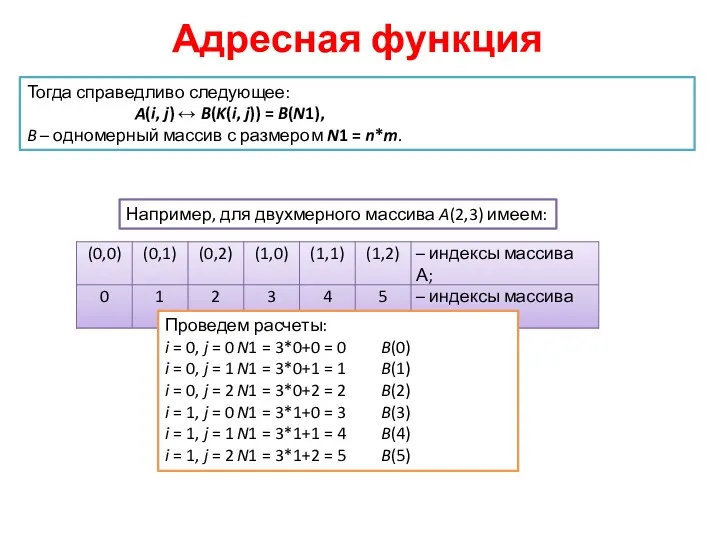
Тогда справедливо следующее:
A(i, j) ↔ B(K(i, j)) = B(N1),
B
Адресная функция
Тогда справедливо следующее:
A(i, j) ↔ B(K(i, j)) = B(N1),
B
Адресная функция
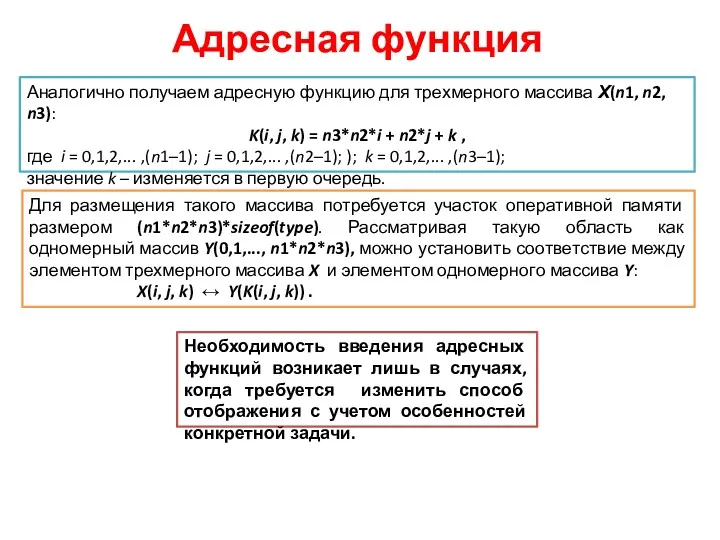
Аналогично получаем адресную функцию для трехмерного массива Х(n1, n2, n3):
K(i,
Адресная функция
Аналогично получаем адресную функцию для трехмерного массива Х(n1, n2, n3):
K(i,
Работа с динамической памятью
Указатели чаще всего используют при работе с динамической
Работа с динамической памятью
Указатели чаще всего используют при работе с динамической
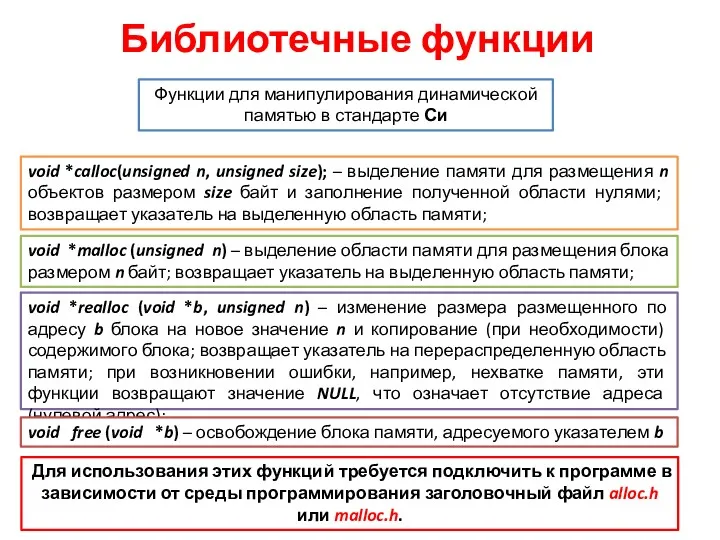
Библиотечные функции
Функции для манипулирования динамической памятью в стандарте Си
void *calloc(unsigned n,
Библиотечные функции
Функции для манипулирования динамической памятью в стандарте Си
void *calloc(unsigned n,
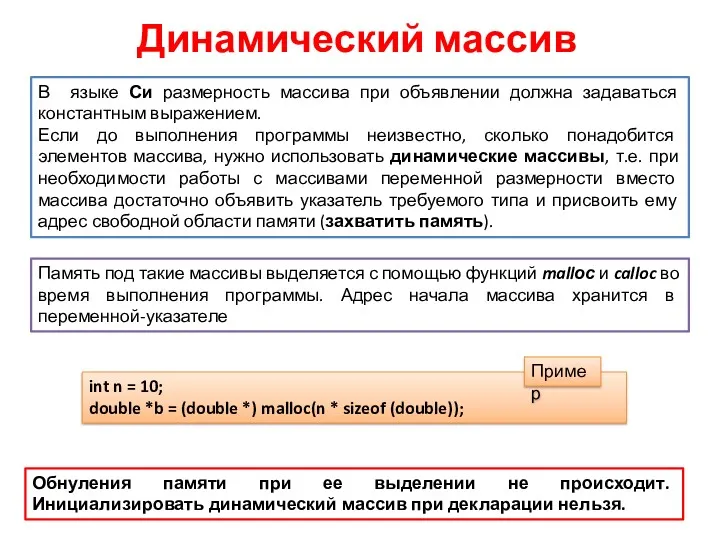
Динамический массив
В языке Си размерность массива при объявлении должна задаваться константным
Динамический массив
В языке Си размерность массива при объявлении должна задаваться константным
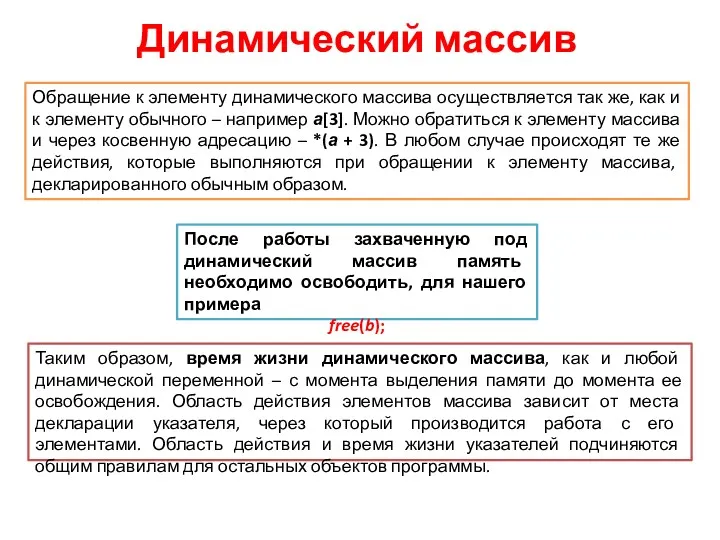
Динамический массив
Обращение к элементу динамического массива осуществляется так же, как и
Динамический массив
Обращение к элементу динамического массива осуществляется так же, как и
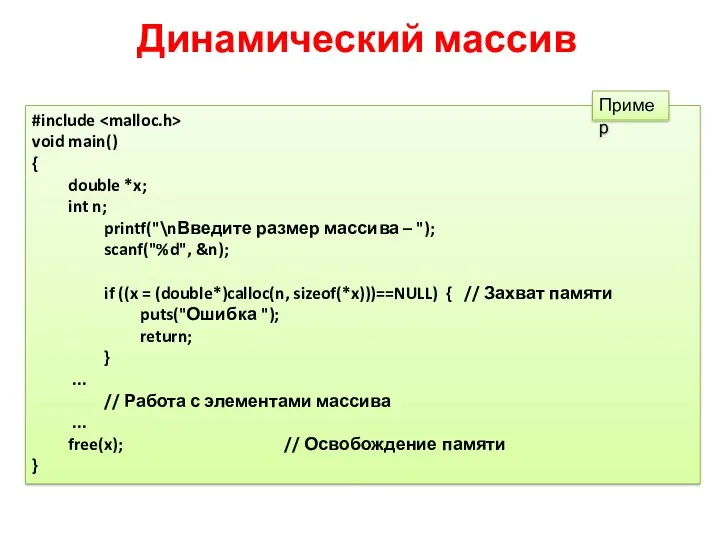
Динамический массив
#include
void main()
{
double *x;
int n;
printf("\nВведите размер массива – ");
scanf("%d",
Динамический массив
#include
void main()
{
double *x;
int n;
printf("\nВведите размер массива – ");
scanf("%d",
 Массивы
Массивы Қазақстан мен сыртқы әлем арасындағы байланыс құралдары
Қазақстан мен сыртқы әлем арасындағы байланыс құралдары Принципы представления данных и команд в компьютере
Принципы представления данных и команд в компьютере Переферійні пристрої
Переферійні пристрої Таргетированная реклама Вконтакте. Вводный курс
Таргетированная реклама Вконтакте. Вводный курс Анонс новой редакции 1С:Университет ПРОФ
Анонс новой редакции 1С:Университет ПРОФ Особенности восприятия графики посетителями сайтов
Особенности восприятия графики посетителями сайтов Автоматизированное тестирование
Автоматизированное тестирование Таблиці. Електронні таблиці. Формати даних та форматування таблиць
Таблиці. Електронні таблиці. Формати даних та форматування таблиць Внедрение в практику преподавания учителей-предметников технологии Web 2.0. с целью повышения эффективности урока
Внедрение в практику преподавания учителей-предметников технологии Web 2.0. с целью повышения эффективности урока Word мәтінідік құжатына графикалық кескіндерді кірістіру
Word мәтінідік құжатына графикалық кескіндерді кірістіру Проектирование баз данных и работа с ними веб-приложений. (Лекция 8)
Проектирование баз данных и работа с ними веб-приложений. (Лекция 8) JavaScript Basics
JavaScript Basics СУБД MS Access
СУБД MS Access Множества. Массивы (Delphi)
Множества. Массивы (Delphi) Система CRM - твой верный помощник
Система CRM - твой верный помощник Система сбора и анализа сведений о преподавателях
Система сбора и анализа сведений о преподавателях Створення розкладу
Створення розкладу Методи equals та hashcode
Методи equals та hashcode Ерекшеліктерді өңдеу. Java
Ерекшеліктерді өңдеу. Java Презентация по теме Табличные вычисления на компьютере к учебнику Семакина. 9 класс.
Презентация по теме Табличные вычисления на компьютере к учебнику Семакина. 9 класс. Отчет о прохождении учебной практики по модулю Эксплуатация и модификация информационных систем
Отчет о прохождении учебной практики по модулю Эксплуатация и модификация информационных систем Локальные компьютерные сети
Локальные компьютерные сети Module 28: Digital Forensics and Incident Analysis and Response
Module 28: Digital Forensics and Incident Analysis and Response Компьютерная грамотность и информационная культура
Компьютерная грамотность и информационная культура Презентация к уроку информатики в 9 классе по теме Информационное общество
Презентация к уроку информатики в 9 классе по теме Информационное общество викторина по информатике для 5-6 классов Информашка
викторина по информатике для 5-6 классов Информашка Антивирусные программы. Антивирусная защита информации
Антивирусные программы. Антивирусная защита информации