- Сходство и различие радиотехнических САУ и других автоматических систем

Содержание
- 2. Предмет и задачи курса Предмет изучения дисциплины – системы автоматического управления (САУ), охватывающие широкий класс систем
- 3. Сходство и различие радиотехнических САУ и других автоматических систем Сходство радиотехнических САУ с автоматическими системами другого
- 4. Краткая история развития систем автоматического управления Первые радиотехнические САУ – системы автоматической регулировки усиления (АРУ) –
- 5. Тема 1: «Общая характеристика систем автоматического управления» Содержание 1. Основные понятия и определения 2. Функциональная схема
- 6. Основные понятия и определения Автоматика – отрасль науки и техники, охватывающая теорию и практику автоматического управления,
- 7. Функциональная схема замкнутой автоматической системы ЭС – элемент сравнения, ЧЭ – чувствительный элемент, У – усилитель,
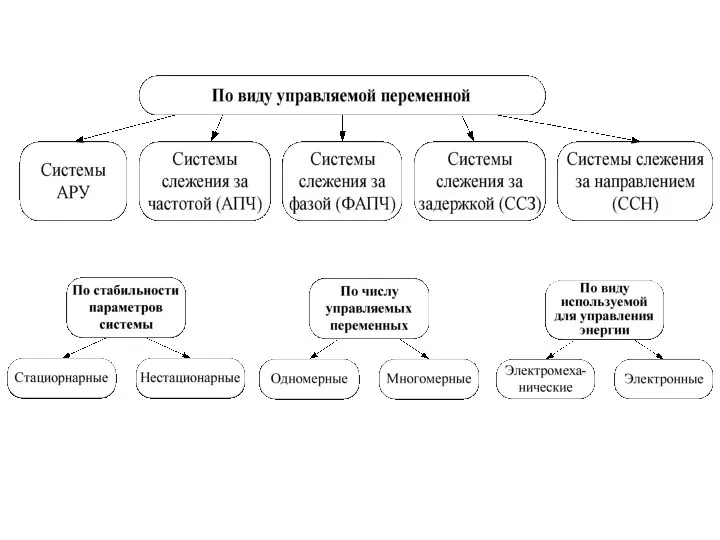
- 8. Классификация САУ
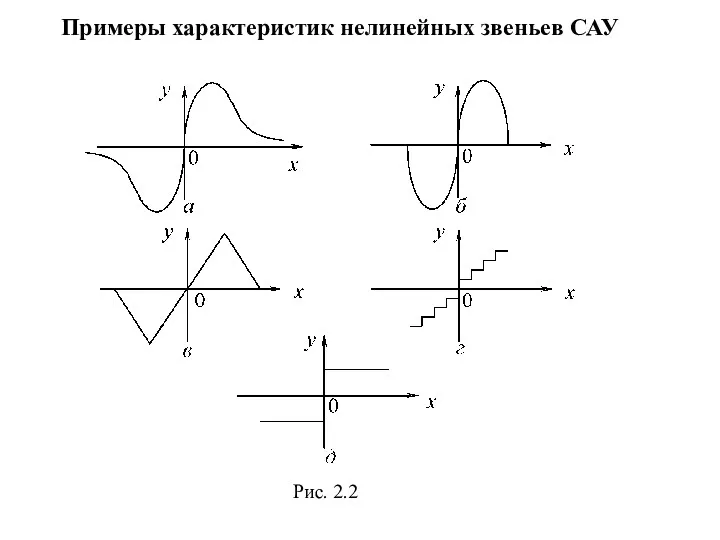
- 10. Примеры характеристик нелинейных звеньев САУ Рис. 2.2
- 11. Статическая характеристика – алгебраическое уравнение y=ƒ(x) (для описания безынерционных звеньев); Динамические характеристики (дифференциальные уравнения или передаточные
- 12. Литература В.Н. Бондаренко Основы автоматики : учеб. пособие, 2004 либо – Радиоавтоматика: учеб. пособие, 2013 Радиоавтоматика.
- 13. Тема 2: «Типовые звенья систем автоматического управления» Содержание Интегрирующее звено Частотные и временные характеристики интегрирующего звена
- 14. Интегрирующее звено Уравнение динамики интегрирующего звена , (7.1) где kи – коэффициент передачи, с –1. Передаточная
- 15. Частотные и временные характеристики интегрирующего звена Рис. 7.1 Рис. 7.2
- 16. Форсирующее звено где k – коэффициент передачи звена, Т – постоянная времени. Передаточная функция К(р)=k(1+Тр). (7.6)
- 17. Характеристики форсирующего звена Рис. 7.3 L(ω)=20lgk+20lg(1+ω2T2)1/2. (7.9) L′(ω)=20lgk при ω ≤ 1/T, L″(ω)=20lgk+20lgωT при ω >
- 18. Способы реализации форсирующего звена Рис. 7.5 Рис. 7.6 Передаточная функция фильтра где постоянные времени Т1=R2C и
- 19. Колебательное звено Уравнение динамики где Т – постоянная времени, γ – коэффициент затухания (демпфирования), k –
- 20. Частотные характеристики колебательного звена Рис. 7.7 (γ1>1, γ2=1, γ3=0,5, γ4
- 21. Резонансная частота При γ ≥ 1 звено апериодическое. ЛАХ L′(ω) 20lgk. (7.18) L″(ω) 20lgk – 40lg(ω/ω0).
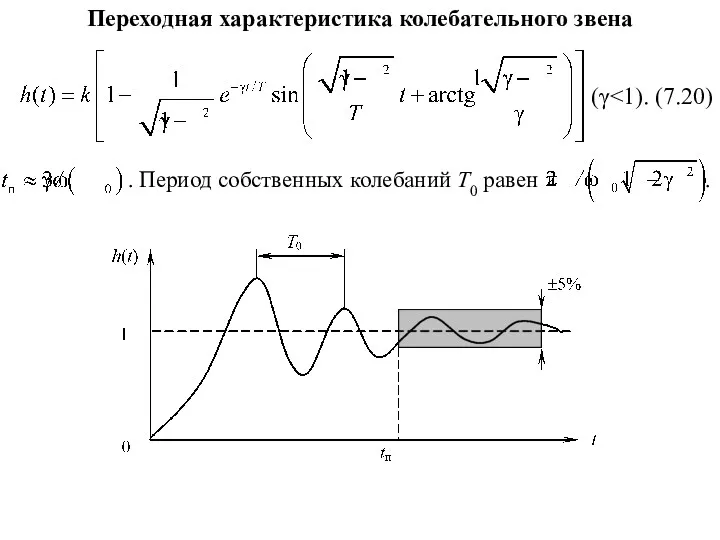
- 22. Переходная характеристика колебательного звена
- 23. Тема 8: «Передаточные функции систем радиоавтоматики» Содержание Обобщенная функциональная схема САУ Обобщенная структурная схема САУ Дискриминационная
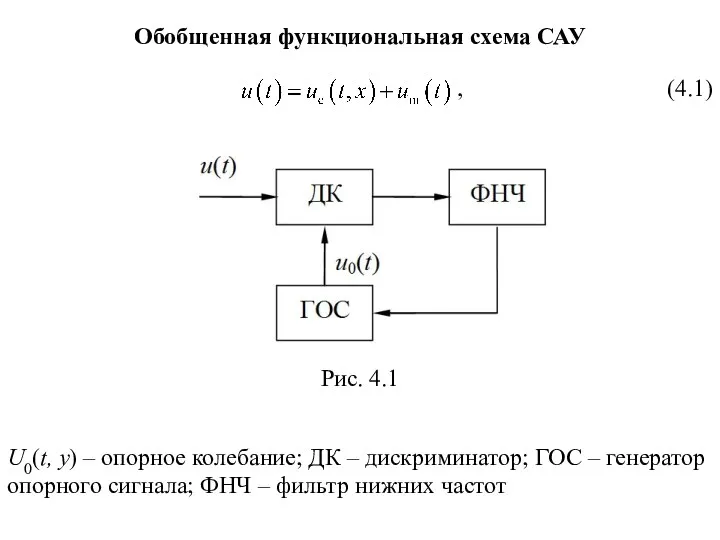
- 24. Обобщенная функциональная схема САУ U0(t, y) – опорное колебание; ДК – дискриминатор; ГОС – генератор опорного
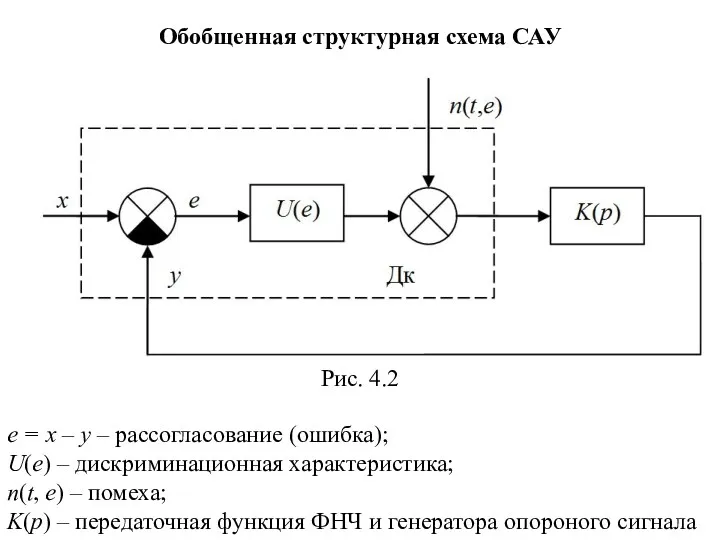
- 25. Обобщенная структурная схема САУ e = x – y – рассогласование (ошибка); U(e) – дискриминационная характеристика;
- 26. Дискриминационная характеристика Зависимость крутизны ДХ от соотношения сигнал/шум на входе дискриминатора: «подавление слабого сигнала шумом» (сигнал/шум
- 27. Флуктуационная характеристика Флуктуационная характеристика (ФХ) – зависимость спектральной плотности помехи на входе дискриминатора от ошибки. n(t,
- 28. Дифференциальное уравнение системы y(t) = K(p)[U(e)+ n(t, e)]. (4.2) Линеаризация дискриминационной характеристики (e → 0) y(t)
- 29. Правила преобразования структурных схем Последовательное соединение звеньев Рис. 4.6
- 30. Параллельное соединение звеньев Рис. 4.7
- 31. Передаточные функции замкнутой системы Передаточная функция замкнутой системы Передаточная функция «от воздействия к ошибке» Рис. 5.1
- 32. САУ как фильтр Рис. 5.2 Kз(jω) – комплексный коэффициент передачи (АФХ). Модуль АФХ Kз(ω) – амплитудно-частотная
- 33. САУ – фильтр нижних частот по отношению к воздействию x(t). Рис. 5.3 Кривая 1 соответствует системе
- 34. Тема 9: «Устойчивость автоматических систем» Содержание Общие требования к устойчивости систем Алгебраические критерии устойчивости Частотные критерии
- 35. Общие требования к устойчивости систем Характеристическое уравнение замкнутой системы: Однородное дифференциальное уравнение: где а0, а1, …,
- 36. Рис. 6.1
- 37. Составляющие свободного движения где Сi – постоянные интегрирования; αi – вещественная часть корня (интенсивность затухания колебаний);
- 38. Алгебраические критерии устойчивости Критерий Гурвица: главный определитель, а также все его диагональные миноры Δ1, Δ2, …
- 39. Частотные критерии устойчивости Критерий Найквиста: замкнутая система устойчива, если АФХ разомкнутой системы для 0 ≤ ω
- 40. Рис. 6.3
- 41. Рис. 6.4
- 42. Запас устойчивости Запас по фазе Δϕ – угол, равный разности . ωср –частота среза разомкнутой системы
- 43. Запретные области по заданным запасам ΔK и Δϕ Рис. 6.6 Достаточный запас по фазе Δϕ >
- 44. Тема 10: «Оценка качества автоматических систем в переходном режиме» Содержание Цифровое моделирование непрерывных систем Анализ качества
- 45. Типовые воздействия в виде детерминированных функций времени: постоянное (ступенчатое), линейное, квадратичное. Методы анализа качества переходного процесса:
- 46. Рис. 7.1 tп – время переходного процесса, x0 – заданное значение, δ – ошибка, emax –
- 47. Переходный процесс: монотонный (кривая 1), апериодический (кривая 2), колебательный (кривая 3). ε=(emax/x0)⋅100% – перерегулирование (максимальное отклонение,
- 48. Цифровое моделирование непрерывных САУ Разностное уравнение – программа рекуррентного вычисления переходного процесса. Дискретная передаточная функция цифровой
- 49. Анализ качества переходного процесса по АЧХ замкнутой системы Рис. 7.3
- 50. Рис. 7.4 M – показатель колебательности; – собственная частота; – частота среза.
- 51. Рис. 7.5 Кривая 1 − АЧХ замкнутой системы имеет пик, переходный процесс колебательным с перерегулированием; кривая
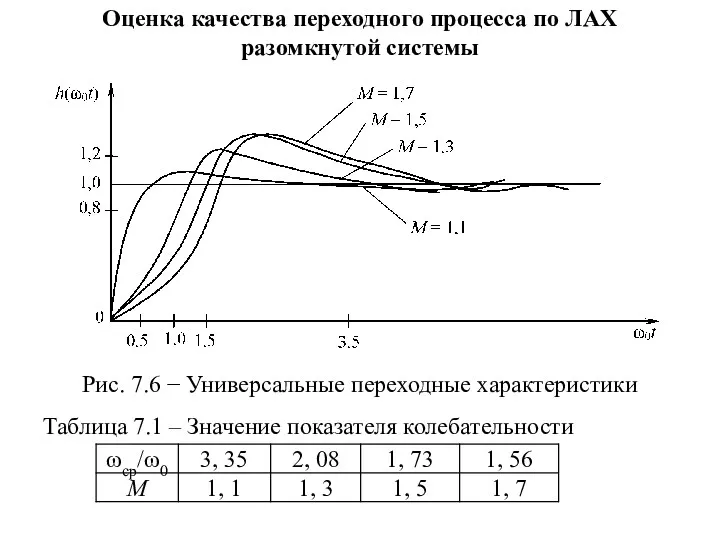
- 52. Оценка качества переходного процесса по ЛАХ разомкнутой системы Рис. 7.6 − Универсальные переходные характеристики Таблица 7.1
- 53. ЛАХ типовых систем Рис. 7.7
- 54. Тема 11: «Точность автоматических систем при типовых воздействиях» Содержание Статические ошибки Динамические ошибки
- 55. Точность САУ при типовых воздействиях Точность АС – величина ошибки в установившемся режиме. Детерминированные воздействия: постоянное
- 56. Статические ошибки Статическая ошибка – ошибка системы при постоянном (ступенчатом) воздействии x(t)=x0=const. Ошибка статической системы (не
- 57. Динамические ошибки Динамическая ошибка eд(t) – ошибка, характеризующая точность замкнутой системы при меняющемся воздействии где x0
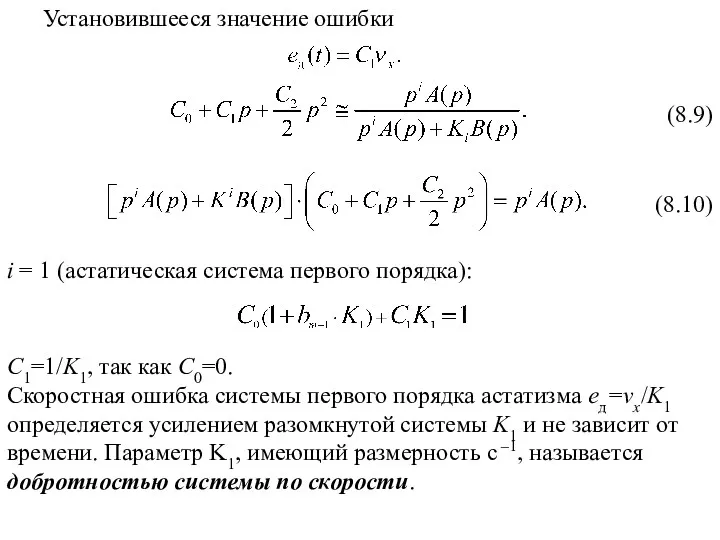
- 58. Установившееся значение ошибки Для статических систем (i=0) C0=1/(1+K0), для астатических систем C0=0. Динамические ошибки типовых систем
- 59. Установившееся значение ошибки i = 1 (астатическая система первого порядка): C1=1/K1, так как C0=0. Скоростная ошибка
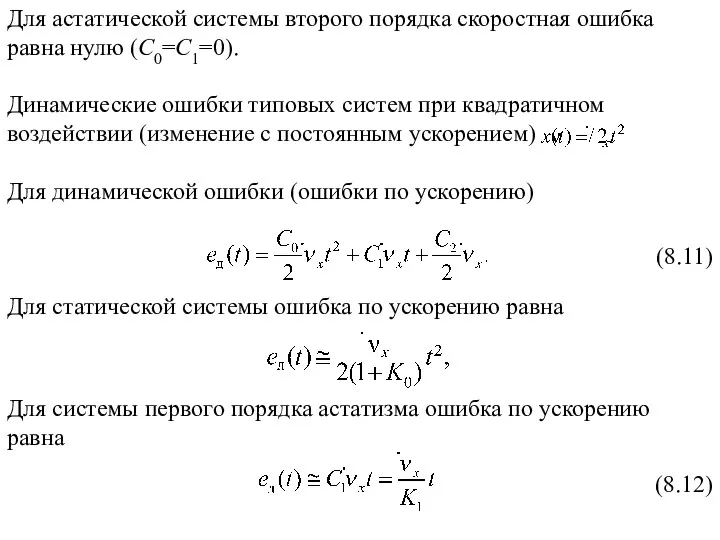
- 60. Для астатической системы второго порядка скоростная ошибка равна нулю (C0=C1=0). Динамические ошибки типовых систем при квадратичном
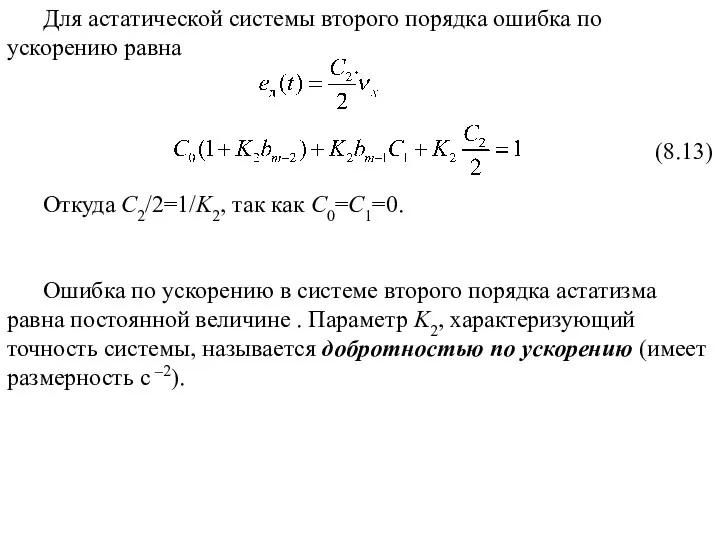
- 61. Откуда C2/2=1/K2, так как C0=C1=0. Ошибка по ускорению в системе второго порядка астатизма равна постоянной величине
- 62. Тема 12: «Точность автоматических систем при воздействии помех» Содержание Составляющие ошибки слежения Дисперсия динамической ошибки при
- 63. Составляющие ошибки слежения Рис. 9.1
- 64. Дисперсия шумовой ошибки где Sэ(ω)=Sn(ω)/k2д − энергетический спектр эквивалентного шума, Sn(ω) – энергетический спектр помехи n(t)
- 65. Шумовая полоса замкнутой системы Для типовых систем радиоавтоматики определенный интеграл в (6.16) сводится к табличному интегралу
- 66. Рис. 9.2
- 67. Дисперсия динамической ошибки при случайном воздействии Рис. 9.3
- 68. Оптимизация шумовой полосы замкнутой системы Рис. 9.4 Рис. 9.5
- 69. Тема 15: «Методы анализа нелинейных систем радиоавтоматики» Содержание Анализ нелинейной системы ЧАП Графо-аналитический метод анализа нелинейной
- 70. Методы анализа нелинейных систем радиоавтоматики метод фазовой плоскости метод кусочно-линейной аппроксимации метод гармонической линеаризации метод статистической
- 71. Анализ нелинейной системы ЧАП Рис.10.1 – Структурная схема системы ЧАП Дифференциальное уравнение системы В установившемся режиме
- 72. Графо-аналитический метод анализа нелинейной системы ЧАП A – устойчивое слежение; Δf=Δf0, Δf0 – остаточная частотная расстройка;
- 73. Передаточная функция замкнутой (линеаризованной) системы n=1. Необходимое и достаточное условие устойчивости: >0, φi : φ1 =0,
- 74. Графический метод определения полос захвата и удержания – дискриминационная характеристика; – «обратная» регулировочная характеристика – полоса
- 75. Зависимость статической ошибки от частотной расстройки Рис.10.4 → : от 0 до ; ← : от
- 76. Тема 16: «Анализ дискретных систем радиоавтоматики» Тема 17: «Показатели качества управления дискретных систем радиоавтоматики» Содержание Математическое
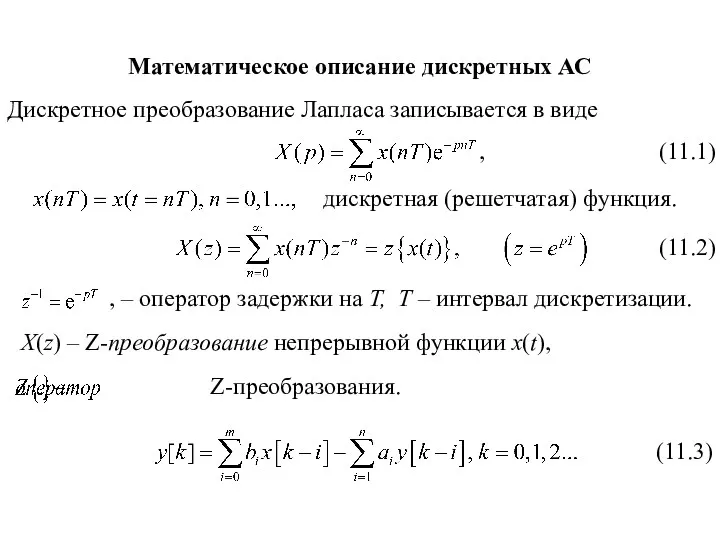
- 77. Математическое описание дискретных АС Дискретное преобразование Лапласа записывается в виде Х(z) – Z-преобразование непрерывной функции х(t),
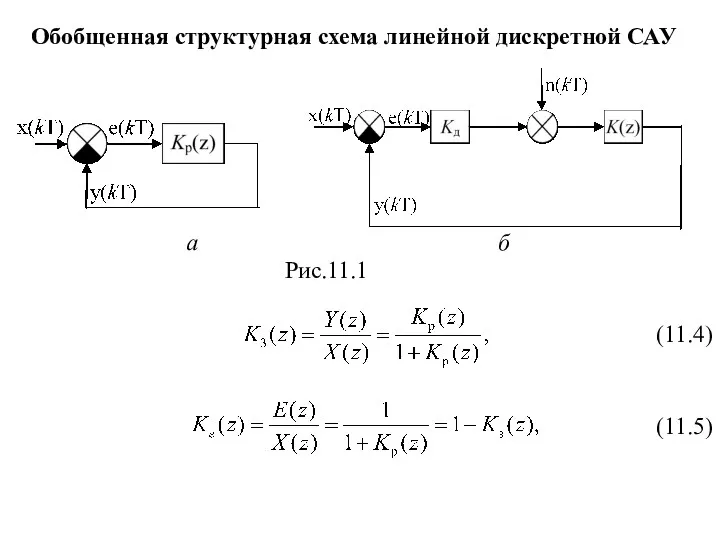
- 78. Обобщенная структурная схема линейной дискретной САУ Рис.11.1
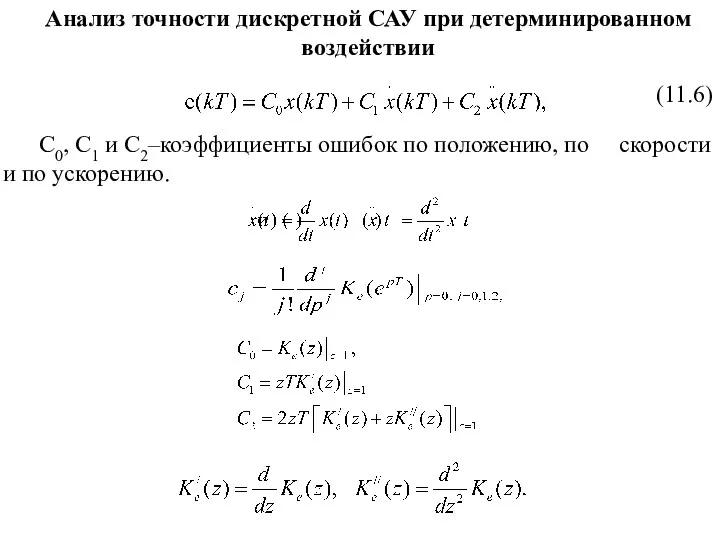
- 79. Анализ точности дискретной САУ при детерминированном воздействии С0, С1 и С2–коэффициенты ошибок по положению, по скорости
- 80. Анализ точности дискретной САУ при воздействии помех Результирующая среднеквадратическая ошибка eд – математическое ожидание (динамическая ошибка).
- 81. Тема 2: «Системы автоматической регулировки усиления (АРУ)» Содержание Система АРУ с управлением по рассогласованию Амплитудные характеристики
- 82. Система АРУ с управлением по рассогласованию Рис. 12.1 РУ – усилитель с регулируемым коэффициентом усиления; АД
- 83. Амплитудные характеристики РУ Рис. 12.2 Кривая 1 – линейный (идеальный) усилитель; кривая 2 – реальный усилитель
- 84. Математическое описание системы АРУ Амплитудная характеристика линейного усилителя: U2(t)=kU1(t). Регулировочная характеристика усилителя: , где − крутизна
- 85. Характеристика АД при линейном детектировании: где – крутизна характеристики (коэффициент передачи) детектора. Регулирующее напряжение связано с
- 86. Структурная схема системы АРУ как системы стабилизации Рис. 12.3
- 87. Тема 3: «Системы частотной автоподстройки (ЧАП)» Содержание Функциональная схема системы частотной автоподстройки Принцип действия системы ЧАП
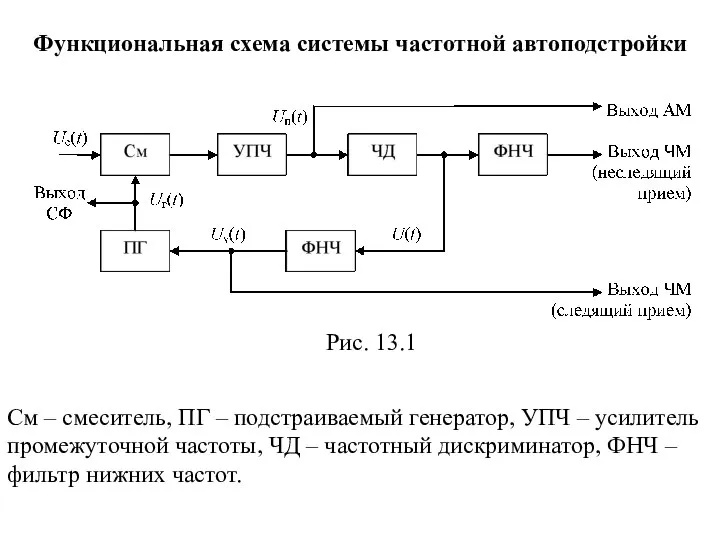
- 88. Функциональная схема системы частотной автоподстройки Рис. 13.1 См – смеситель, ПГ – подстраиваемый генератор, УПЧ –
- 89. Принцип действия системы ЧАП Пример. Стабилизация промежуточной частоты супергетеродинного приемника uc(t) – принятый сигнал; uг(t) –
- 90. Рис. 13.2 – Дискриминационная характеристика ЧД Рис. 13.3 – Регулировочная характеристика ПГ Δf0 – начальная расстройка;
- 91. Тема 4: «Системы фазовой автоподстройки (ФАП)» Содержание Применение системы ФАП Функциональная схема системы фазовой автоподстройки Дискриминационная
- 92. Применение системы ФАП следящие фильтры доплеровских систем измерения скорости; стабилизация промежуточной частоты приёмников; синхронное детектирование сигналов;
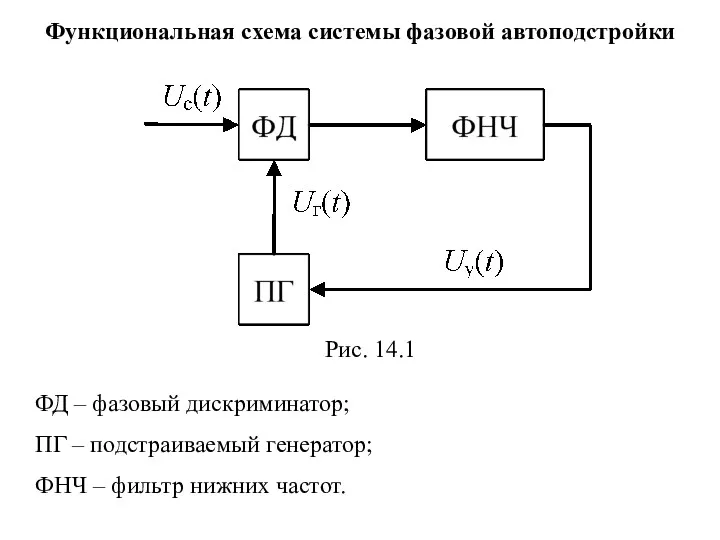
- 93. Функциональная схема системы фазовой автоподстройки Рис. 14.1 ФД – фазовый дискриминатор; ПГ – подстраиваемый генератор; ФНЧ
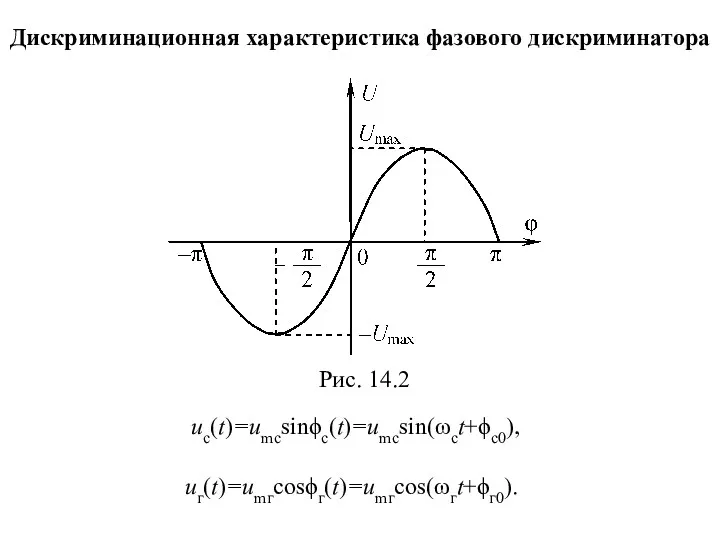
- 94. Дискриминационная характеристика фазового дискриминатора uc(t)=umcsinϕc(t)=umcsin(ωct+ϕc0), uг(t)=umгcosϕг(t)=umгcos(ωгt+ϕг0). Рис. 14.2
- 95. Рис. 14.3 tз – время захвата; стационарный режим (режим слежения или удержания) – режим, при котором
- 96. Рис. 14.4 Δf0>Δfз – режим биений. Полоса захвата определяется диапазоном перестройки генератора, формой дискриминационной характеристики, а
- 97. Рис. 14.5
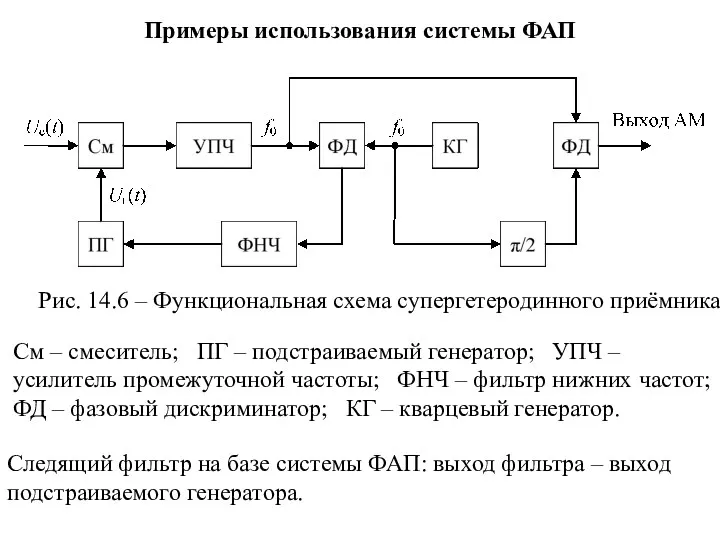
- 98. Примеры использования системы ФАП Рис. 14.6 – Функциональная схема супергетеродинного приёмника См – смеситель; ПГ –
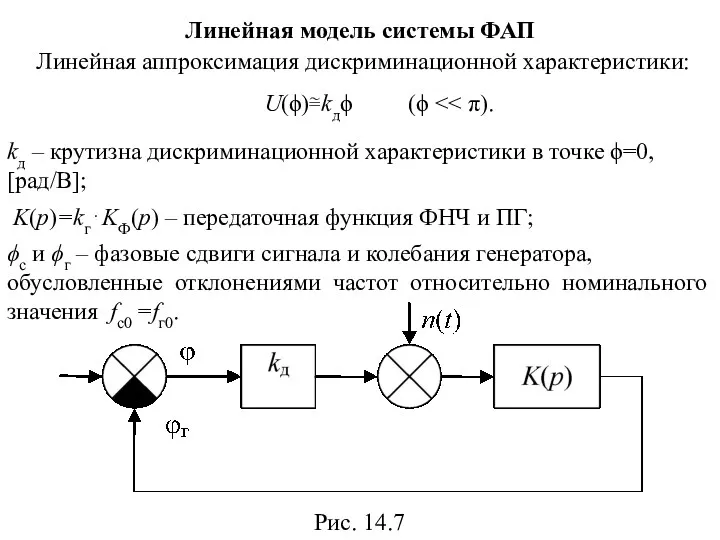
- 99. Линейная модель системы ФАП Линейная аппроксимация дискриминационной характеристики: U(ϕ)≅kдϕ (ϕ kд – крутизна дискриминационной характеристики в
- 100. Тема 5: «Системы слежения за задержкой сигнала (ССЗ)» Содержание Дискриминационная характеристика временного дискриминатора Временной дискриминатор Формирование
- 101. Дискриминационная характеристика временного дискриминатора Рис. 15.1
- 102. Временной дискриминатор Рис. 15.2 ВС – временной селектор.
- 103. Формирование дискриминационной характеристики Рис. 15.3 U1, U2 – выходные напряжения каналов 1 и 2. – временное
- 104. Структурная схема системы слежения за задержкой Временное рассогласование Выходное напряжение дискриминатора где – полезная составляющая; –
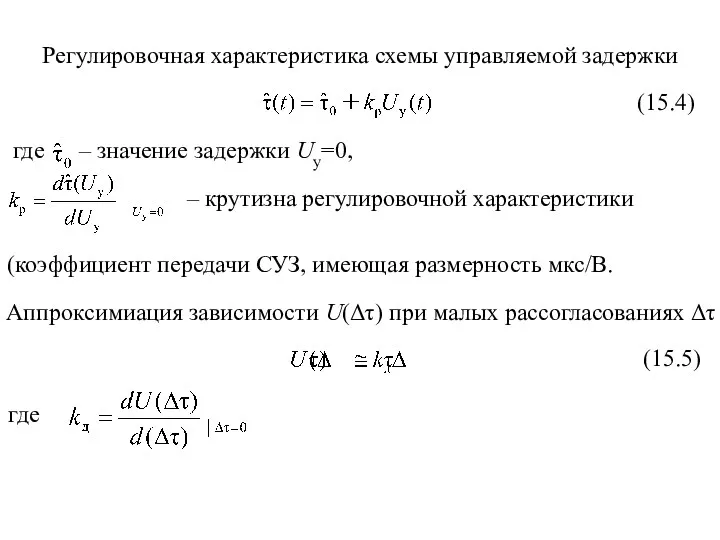
- 105. Регулировочная характеристика схемы управляемой задержки где – значение задержки Uу=0, – крутизна регулировочной характеристики (коэффициент передачи
- 106. Рис. 15.4 Рис. 15.5 К(p)=kPKФ(p) – передаточная функция, описывающая схему управляемой задержки и ФНЧ. Линейная модель
- 107. Тема 6: «Системы слежения за направлением прихода сигналов (ССН)» Содержание Амплитудный пеленгатор, использующий суммарно-разностный метод пеленгования.
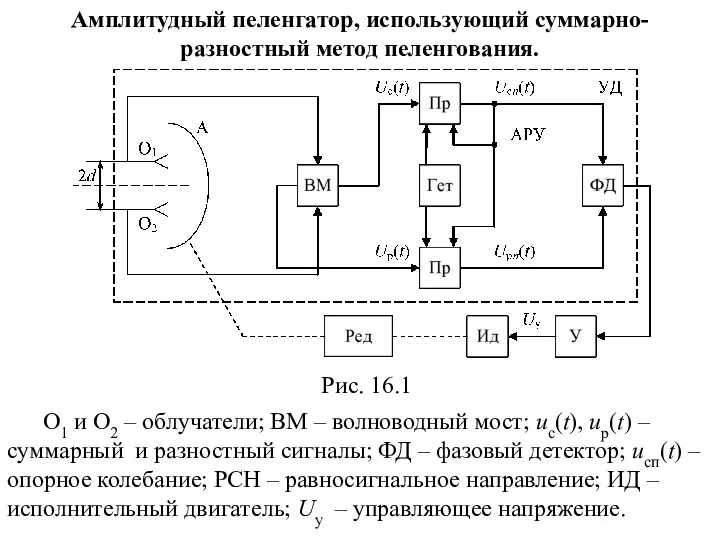
- 108. Амплитудный пеленгатор, использующий суммарно-разностный метод пеленгования. Рис. 16.1 О1 и О2 – облучатели; ВМ – волноводный
- 109. Диаграмма направленности антенны Дискриминационная характеристика Рис. 16.2 f1(α) и f2(α) – парциальные диаграммы; α – угловое
- 110. Угловое рассогласование где αц – азимут (пеленг) цели, – оценка азимута. Напряжение на выходе УД (углового
- 111. Управляющее напряжение Uу(t)=kуUд(t), (16.6) где Ωд(t) – управляемая переменная (скорость вращения ротора двигателя); kд – коэффициент
- 113. Скачать презентацию
Предмет и задачи курса
Предмет изучения дисциплины – системы автоматического управления (САУ),
Предмет и задачи курса
Предмет изучения дисциплины – системы автоматического управления (САУ),
Сходство и различие радиотехнических САУ и других автоматических систем
Сходство радиотехнических САУ
Сходство и различие радиотехнических САУ и других автоматических систем
Сходство радиотехнических САУ
Краткая история развития систем автоматического управления
Первые радиотехнические САУ – системы автоматической
Краткая история развития систем автоматического управления
Первые радиотехнические САУ – системы автоматической
Тема 1: «Общая характеристика систем автоматического
управления»
Содержание
1. Основные понятия и определения
2.
Тема 1: «Общая характеристика систем автоматического
управления»
Содержание
1. Основные понятия и определения
2.
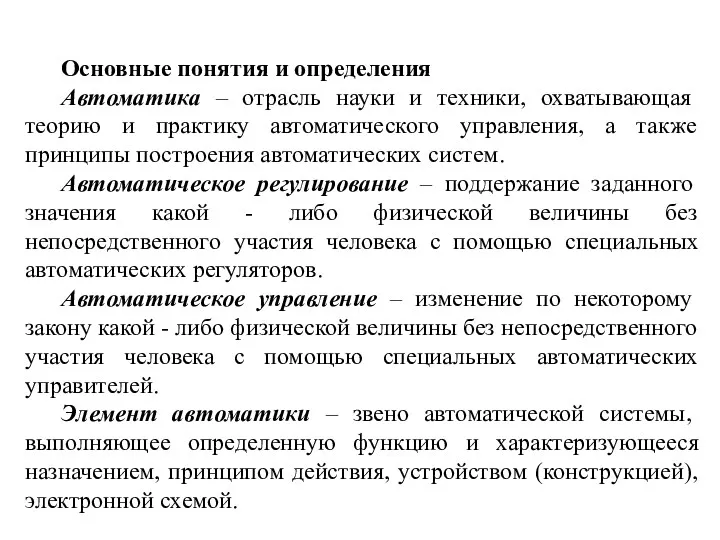
Основные понятия и определения
Автоматика – отрасль науки и техники, охватывающая теорию
Автоматика – отрасль науки и техники, охватывающая теорию
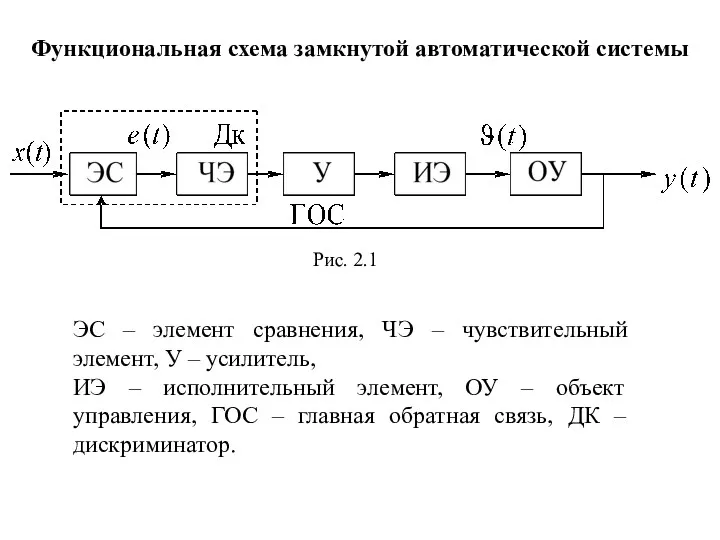
Функциональная схема замкнутой автоматической системы
ЭС – элемент сравнения, ЧЭ – чувствительный
Функциональная схема замкнутой автоматической системы
ЭС – элемент сравнения, ЧЭ – чувствительный
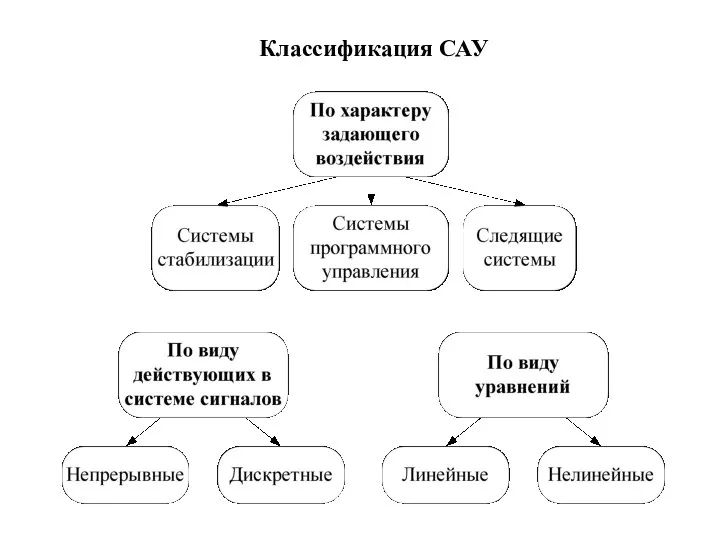
Классификация САУ
Классификация САУ
Примеры характеристик нелинейных звеньев САУ
Рис. 2.2
Примеры характеристик нелинейных звеньев САУ
Рис. 2.2
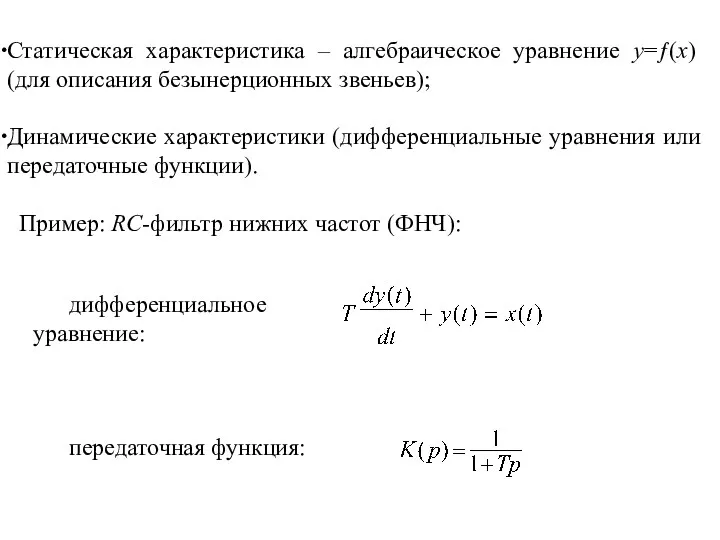
Статическая характеристика – алгебраическое уравнение y=ƒ(x) (для описания безынерционных звеньев);
Динамические характеристики
Статическая характеристика – алгебраическое уравнение y=ƒ(x) (для описания безынерционных звеньев);
Динамические характеристики
Литература
В.Н. Бондаренко
Основы автоматики : учеб. пособие, 2004
либо – Радиоавтоматика: учеб. пособие,
Литература
В.Н. Бондаренко
Основы автоматики : учеб. пособие, 2004
либо – Радиоавтоматика: учеб. пособие,
Тема 2: «Типовые звенья систем автоматического
управления»
Содержание
Интегрирующее звено
Частотные и временные характеристики
управления»
Содержание
Интегрирующее звено
Частотные и временные характеристики
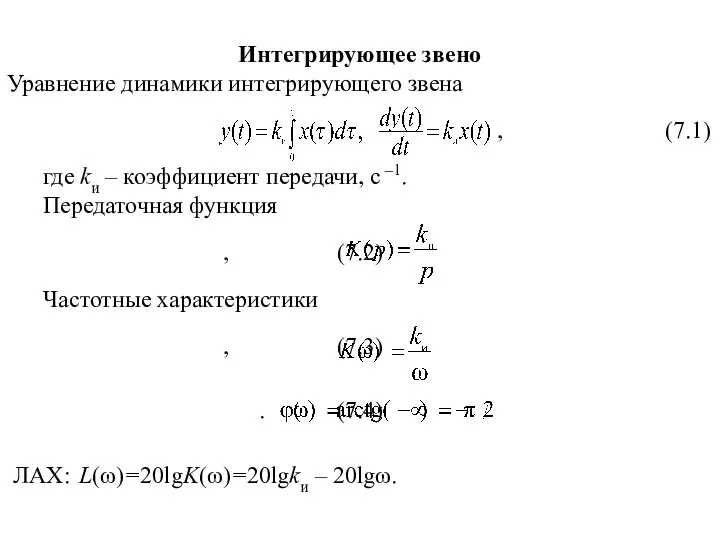
Интегрирующее звено
Уравнение динамики интегрирующего звена
, (7.1)
где kи – коэффициент передачи, с
Интегрирующее звено
Уравнение динамики интегрирующего звена
, (7.1)
где kи – коэффициент передачи, с
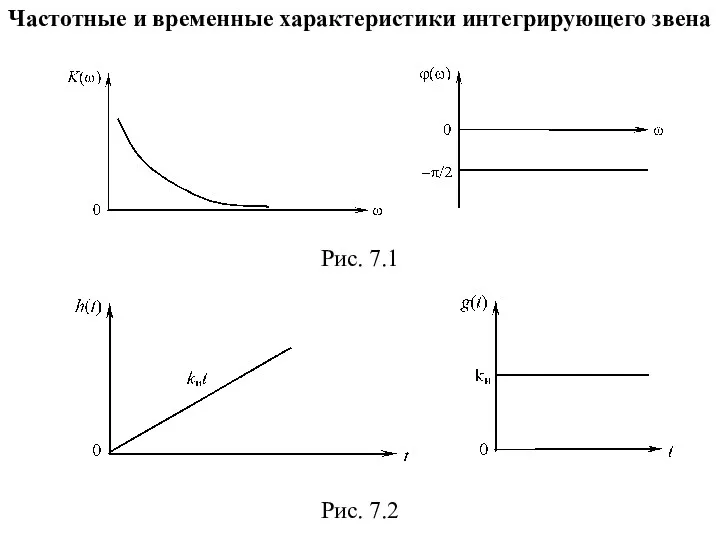
Частотные и временные характеристики интегрирующего звена
Рис. 7.1
Рис. 7.2
Частотные и временные характеристики интегрирующего звена
Рис. 7.1
Рис. 7.2
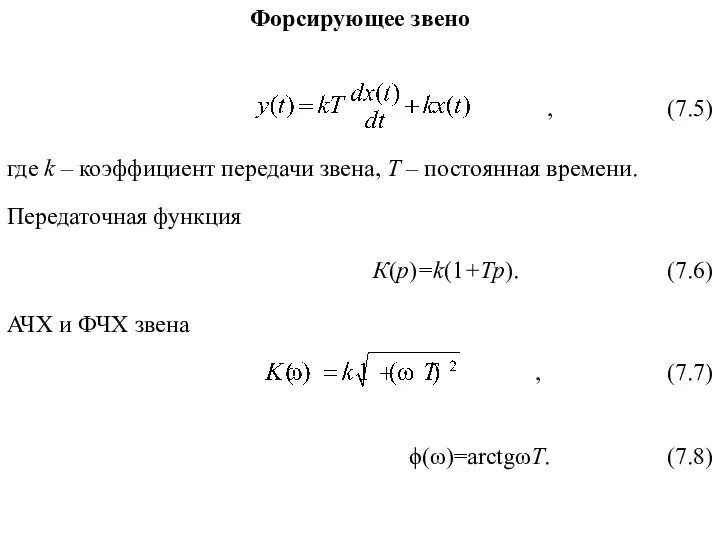
Форсирующее звено
где k – коэффициент передачи звена, Т – постоянная времени.
Передаточная
Форсирующее звено
где k – коэффициент передачи звена, Т – постоянная времени.
Передаточная
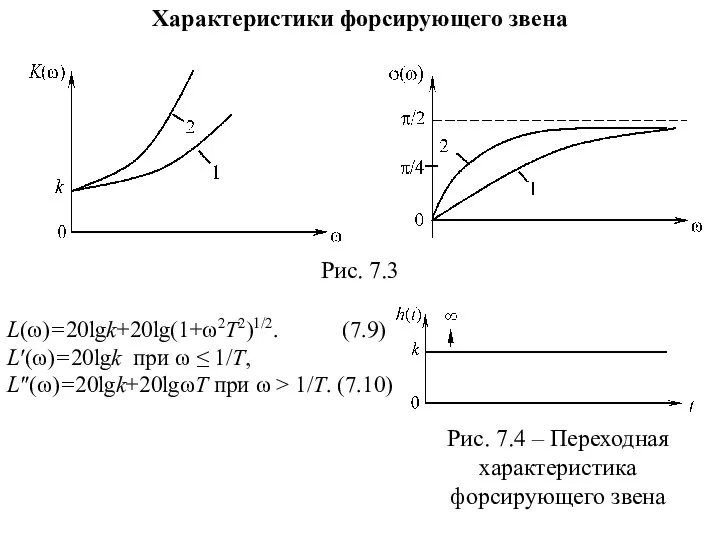
Характеристики форсирующего звена
Рис. 7.3
L(ω)=20lgk+20lg(1+ω2T2)1/2. (7.9)
L′(ω)=20lgk при ω ≤ 1/T,
L″(ω)=20lgk+20lgωT при ω
Характеристики форсирующего звена
Рис. 7.3
L(ω)=20lgk+20lg(1+ω2T2)1/2. (7.9)
L′(ω)=20lgk при ω ≤ 1/T,
L″(ω)=20lgk+20lgωT при ω
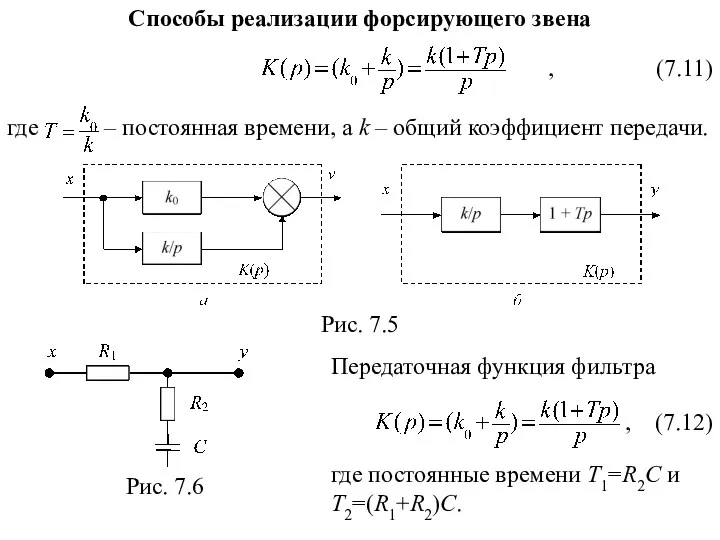
Способы реализации форсирующего звена
Рис. 7.5
Рис. 7.6
Передаточная функция фильтра
где постоянные времени Т1=R2C
Способы реализации форсирующего звена
Рис. 7.5
Рис. 7.6
Передаточная функция фильтра
где постоянные времени Т1=R2C
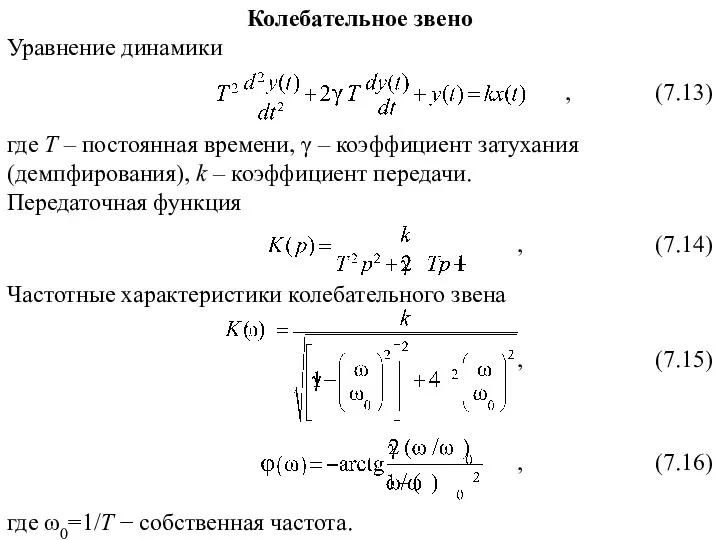
Колебательное звено
Уравнение динамики
где Т – постоянная времени, γ – коэффициент затухания
Колебательное звено
Уравнение динамики
где Т – постоянная времени, γ – коэффициент затухания
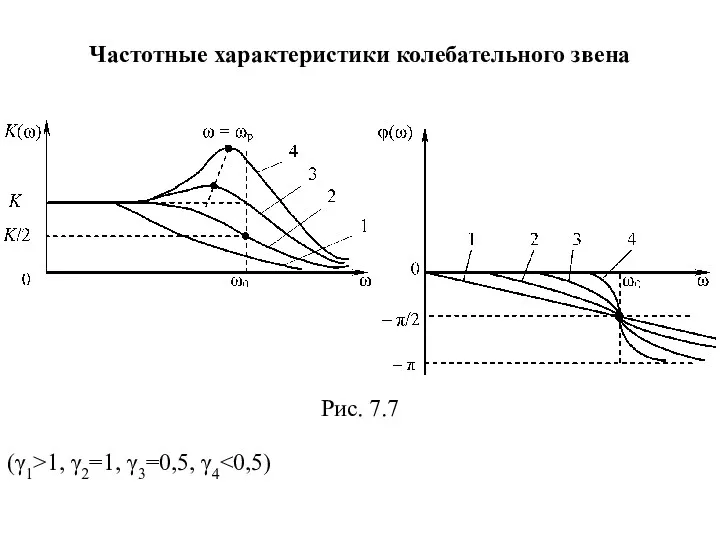
Частотные характеристики колебательного звена
Рис. 7.7
(γ1>1, γ2=1, γ3=0,5, γ4<0,5)
Частотные характеристики колебательного звена
Рис. 7.7
(γ1>1, γ2=1, γ3=0,5, γ4<0,5)
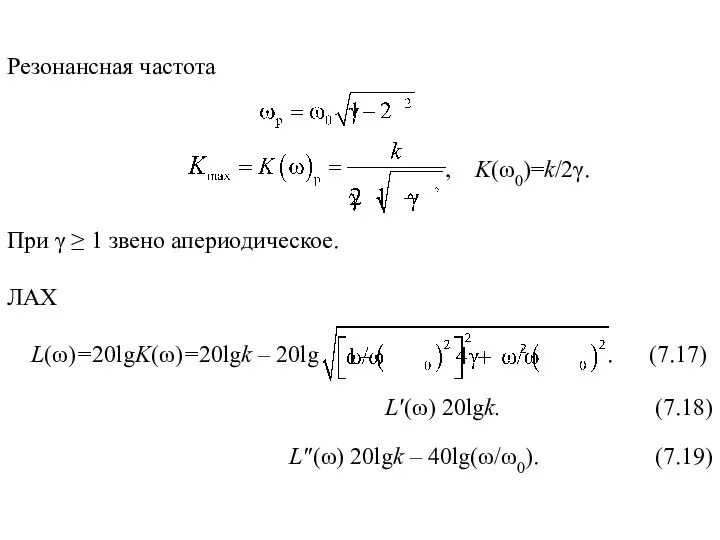
Резонансная частота
При γ ≥ 1 звено апериодическое.
ЛАХ
L′(ω) 20lgk. (7.18)
L″(ω) 20lgk –
Резонансная частота
При γ ≥ 1 звено апериодическое.
ЛАХ
L′(ω) 20lgk. (7.18)
L″(ω) 20lgk –
Переходная характеристика колебательного звена
Переходная характеристика колебательного звена
Тема 8: «Передаточные функции систем
радиоавтоматики»
Содержание
Обобщенная функциональная схема САУ
Обобщенная структурная схема
Тема 8: «Передаточные функции систем
радиоавтоматики»
Содержание
Обобщенная функциональная схема САУ
Обобщенная структурная схема
Обобщенная функциональная схема САУ
U0(t, y) – опорное колебание; ДК – дискриминатор;
Обобщенная функциональная схема САУ
U0(t, y) – опорное колебание; ДК – дискриминатор;
Обобщенная структурная схема САУ
e = x – y – рассогласование (ошибка);
U(e)
Обобщенная структурная схема САУ
e = x – y – рассогласование (ошибка);
U(e)
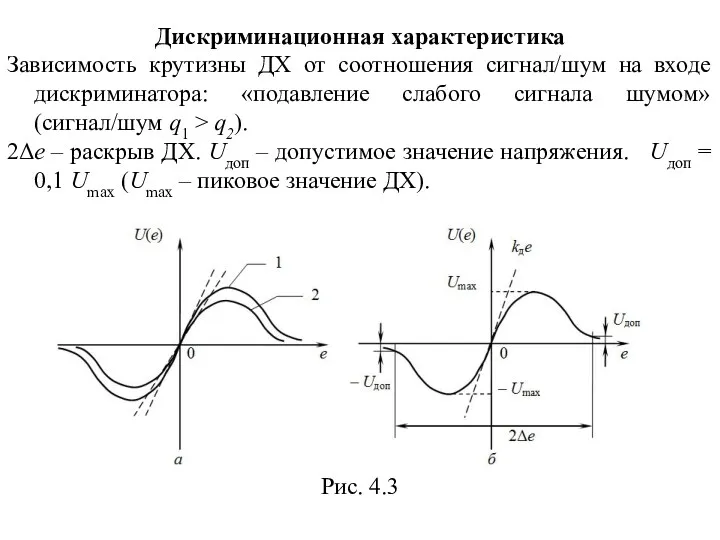
Дискриминационная характеристика
Зависимость крутизны ДХ от соотношения сигнал/шум на входе дискриминатора: «подавление
Дискриминационная характеристика
Зависимость крутизны ДХ от соотношения сигнал/шум на входе дискриминатора: «подавление
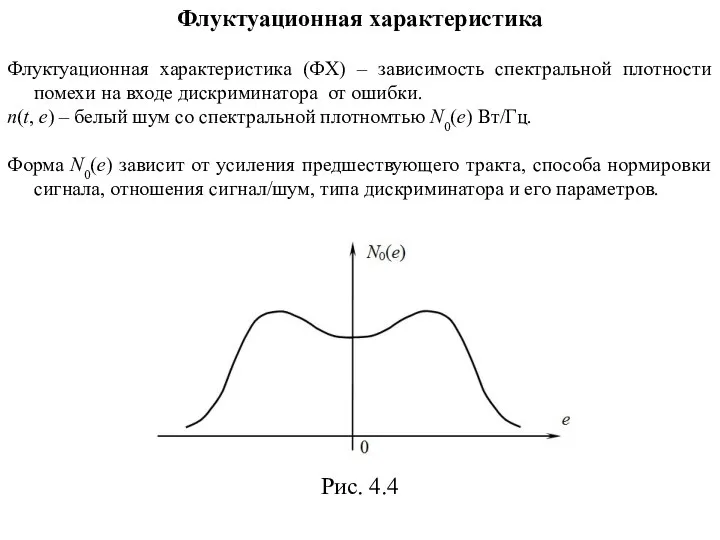
Флуктуационная характеристика
Флуктуационная характеристика (ФХ) – зависимость спектральной плотности помехи на входе
Флуктуационная характеристика
Флуктуационная характеристика (ФХ) – зависимость спектральной плотности помехи на входе
![Дифференциальное уравнение системы y(t) = K(p)[U(e)+ n(t, e)]. (4.2) Линеаризация](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/393151/slide-27.jpg)
Дифференциальное уравнение системы
y(t) = K(p)[U(e)+ n(t, e)]. (4.2)
Линеаризация дискриминационной характеристики (e
Дифференциальное уравнение системы
y(t) = K(p)[U(e)+ n(t, e)]. (4.2)
Линеаризация дискриминационной характеристики (e
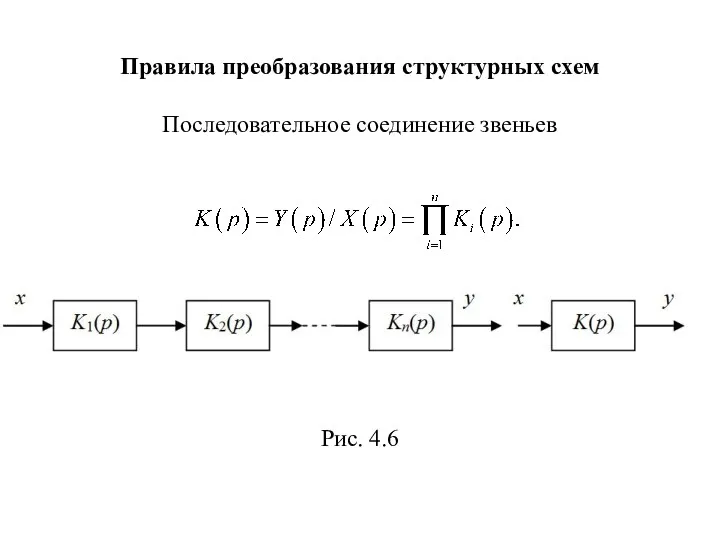
Правила преобразования структурных схем
Последовательное соединение звеньев
Рис. 4.6
Правила преобразования структурных схем
Последовательное соединение звеньев
Рис. 4.6
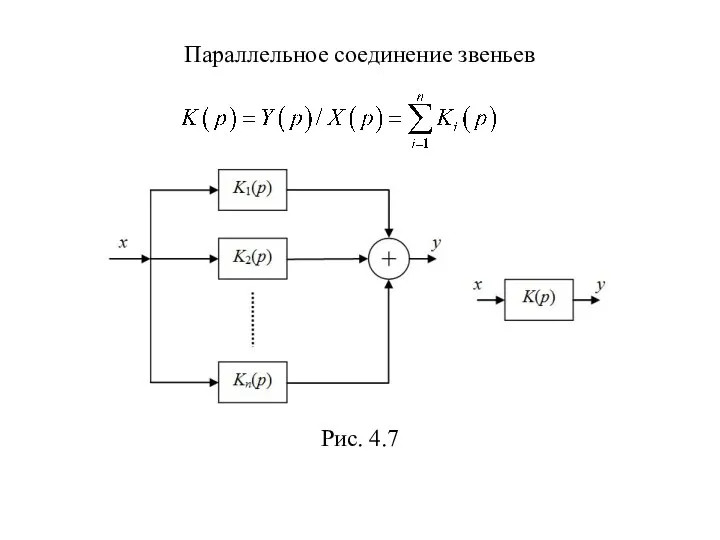
Параллельное соединение звеньев
Рис. 4.7
Параллельное соединение звеньев
Рис. 4.7
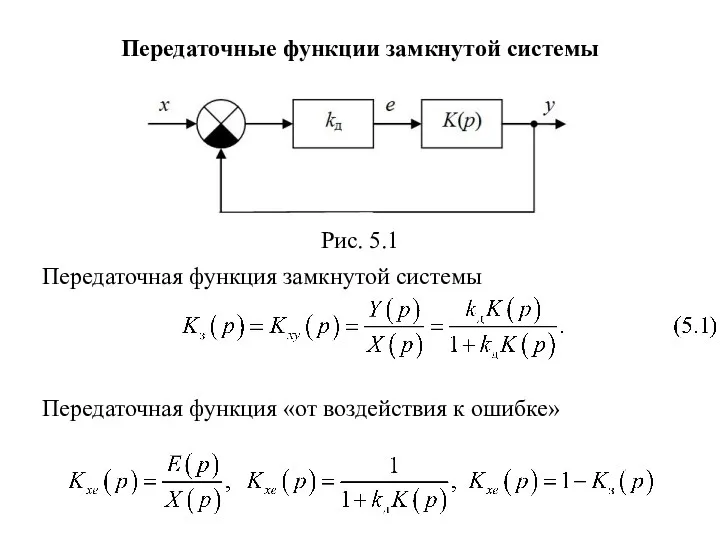
Передаточные функции замкнутой системы
Передаточная функция замкнутой системы
Передаточная функция «от воздействия к
Передаточные функции замкнутой системы
Передаточная функция замкнутой системы
Передаточная функция «от воздействия к
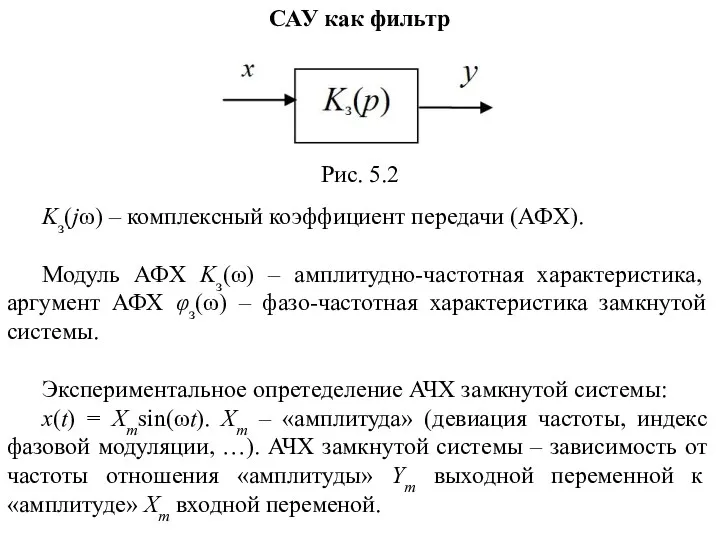
САУ как фильтр
Рис. 5.2
Kз(jω) – комплексный коэффициент передачи (АФХ).
Модуль АФХ Kз(ω)
САУ как фильтр
Рис. 5.2
Kз(jω) – комплексный коэффициент передачи (АФХ).
Модуль АФХ Kз(ω)
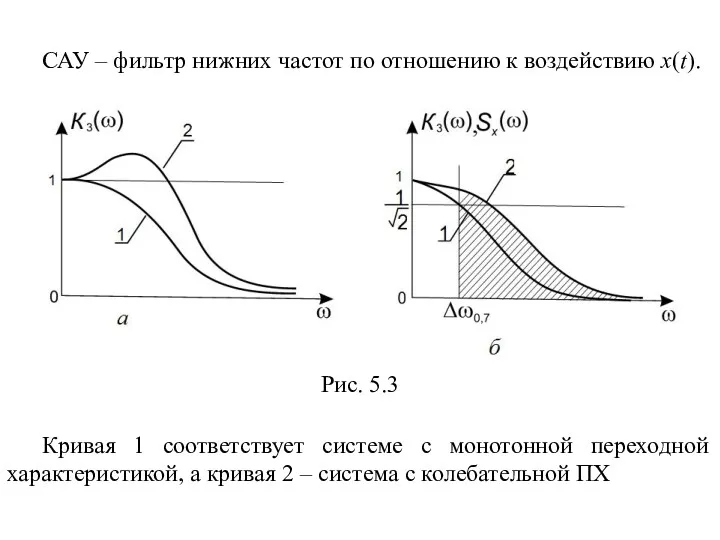
САУ – фильтр нижних частот по отношению к воздействию x(t).
Рис. 5.3
Кривая
САУ – фильтр нижних частот по отношению к воздействию x(t).
Рис. 5.3
Кривая
Тема 9: «Устойчивость автоматических систем»
Содержание
Общие требования к устойчивости систем
Алгебраические критерии устойчивости
Частотные
Содержание
Общие требования к устойчивости систем
Алгебраические критерии устойчивости
Частотные
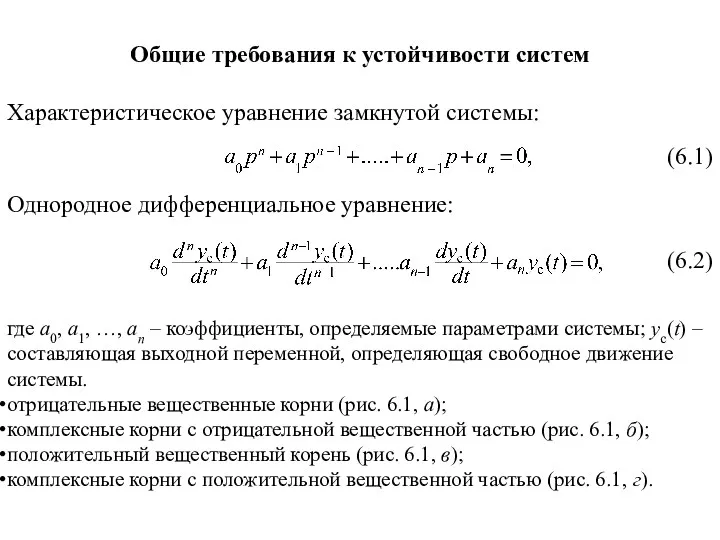
Общие требования к устойчивости систем
Характеристическое уравнение замкнутой системы:
Однородное дифференциальное уравнение:
где а0,
Общие требования к устойчивости систем
Характеристическое уравнение замкнутой системы:
Однородное дифференциальное уравнение:
где а0,
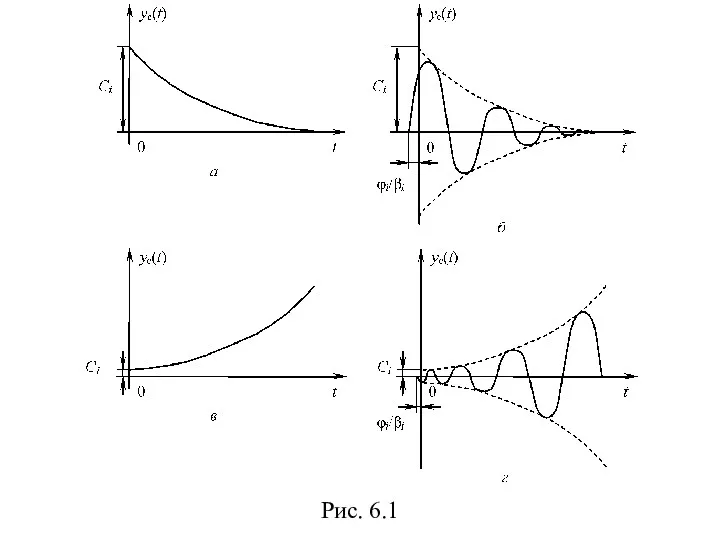
Рис. 6.1
Рис. 6.1
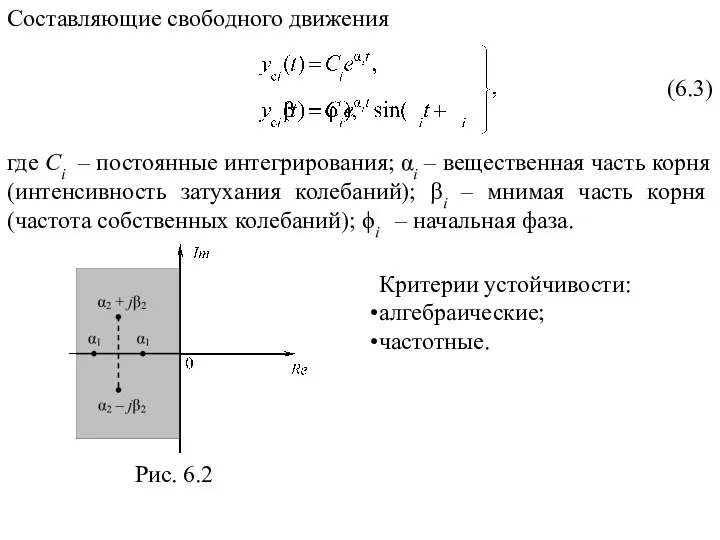
Составляющие свободного движения
где Сi – постоянные интегрирования; αi – вещественная часть
Составляющие свободного движения
где Сi – постоянные интегрирования; αi – вещественная часть
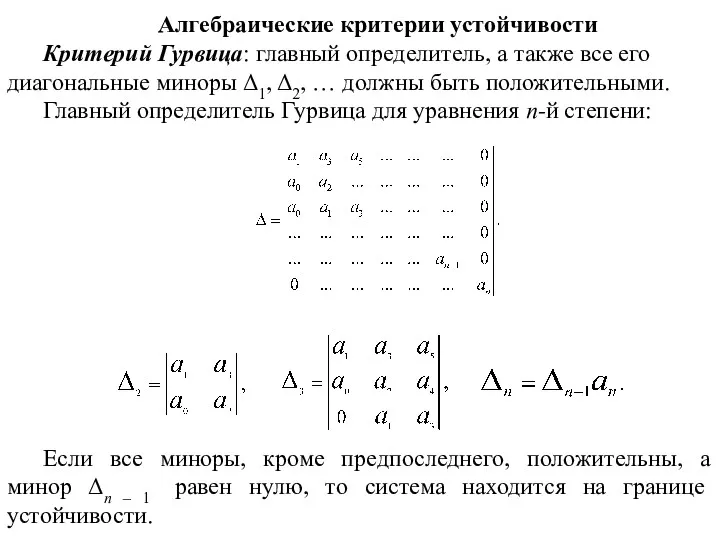
Алгебраические критерии устойчивости
Критерий Гурвица: главный определитель, а также все его диагональные
Алгебраические критерии устойчивости
Критерий Гурвица: главный определитель, а также все его диагональные
Частотные критерии устойчивости
Критерий Найквиста: замкнутая система устойчива, если АФХ разомкнутой системы
Частотные критерии устойчивости
Критерий Найквиста: замкнутая система устойчива, если АФХ разомкнутой системы
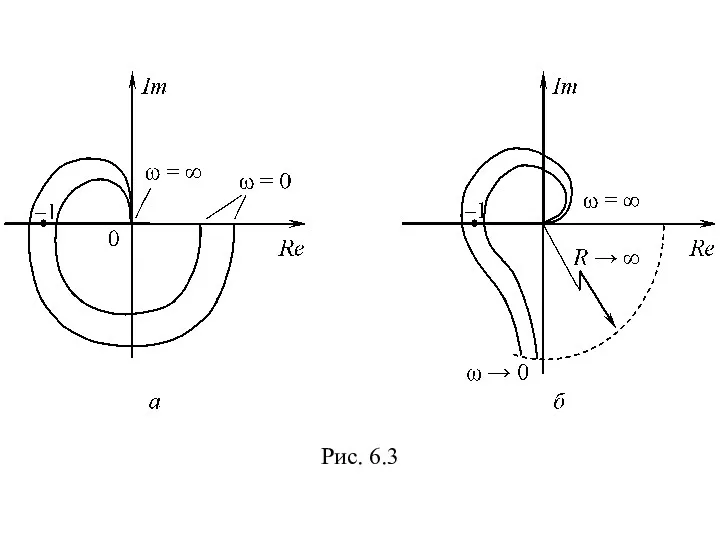
Рис. 6.3
Рис. 6.3
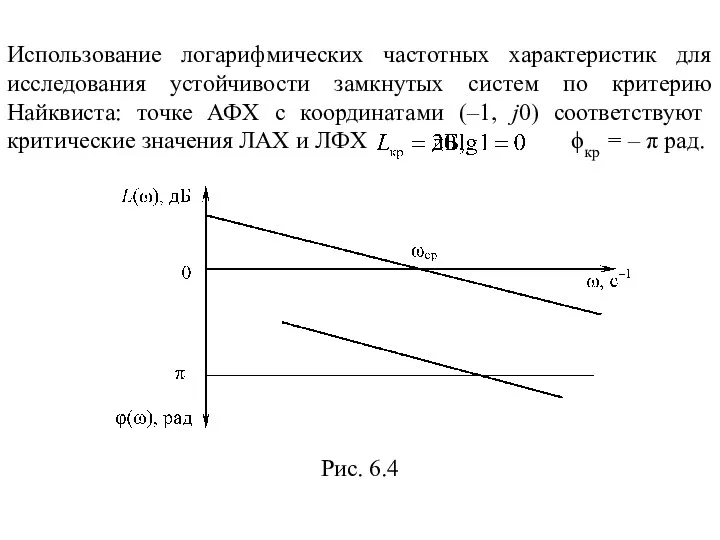
Рис. 6.4
Рис. 6.4
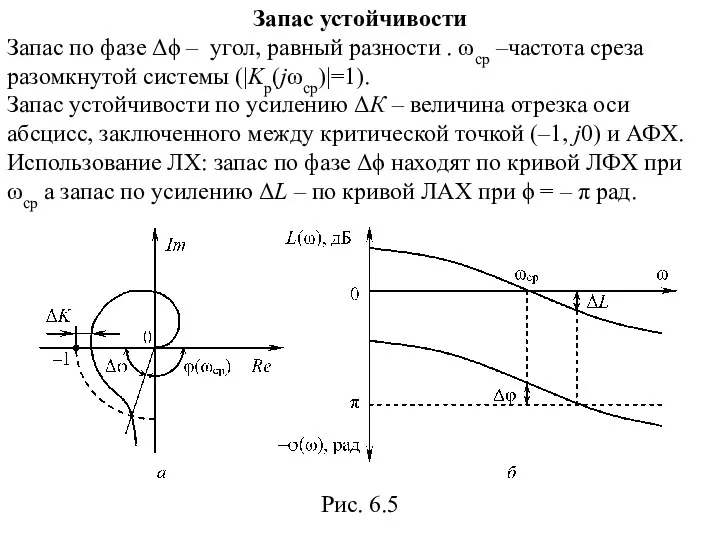
Запас устойчивости
Запас по фазе Δϕ – угол, равный разности . ωср
Запас устойчивости
Запас по фазе Δϕ – угол, равный разности . ωср
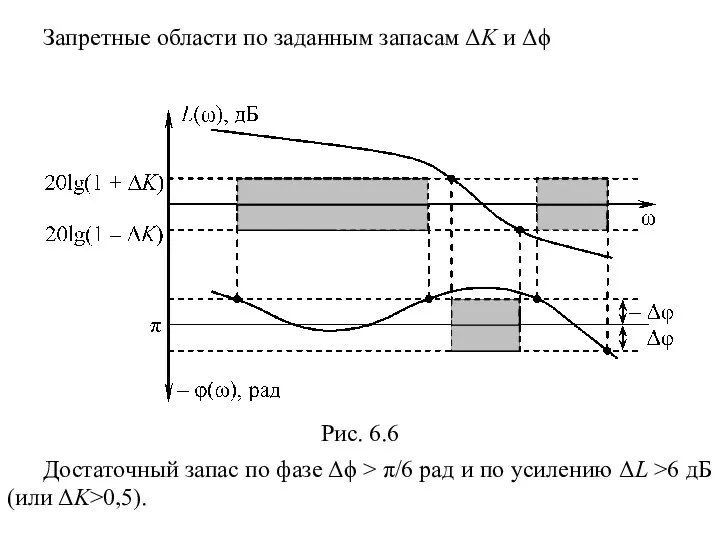
Запретные области по заданным запасам ΔK и Δϕ
Рис. 6.6
Достаточный запас по
Запретные области по заданным запасам ΔK и Δϕ
Рис. 6.6
Достаточный запас по
Тема 10: «Оценка качества автоматических систем в переходном режиме»
Содержание
Цифровое моделирование непрерывных
Содержание
Цифровое моделирование непрерывных
Типовые воздействия в виде детерминированных функций времени:
постоянное (ступенчатое),
линейное,
квадратичное.
Методы анализа качества переходного
Типовые воздействия в виде детерминированных функций времени:
постоянное (ступенчатое),
линейное,
квадратичное.
Методы анализа качества переходного
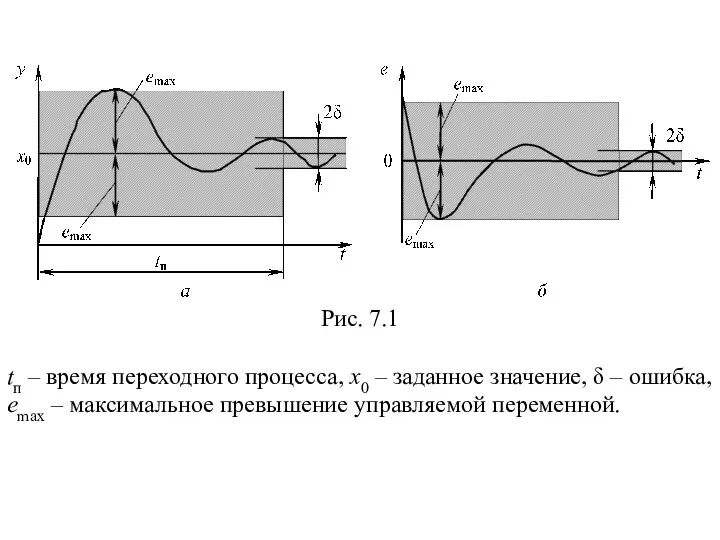
Рис. 7.1
tп – время переходного процесса, x0 – заданное значение, δ
Рис. 7.1
tп – время переходного процесса, x0 – заданное значение, δ
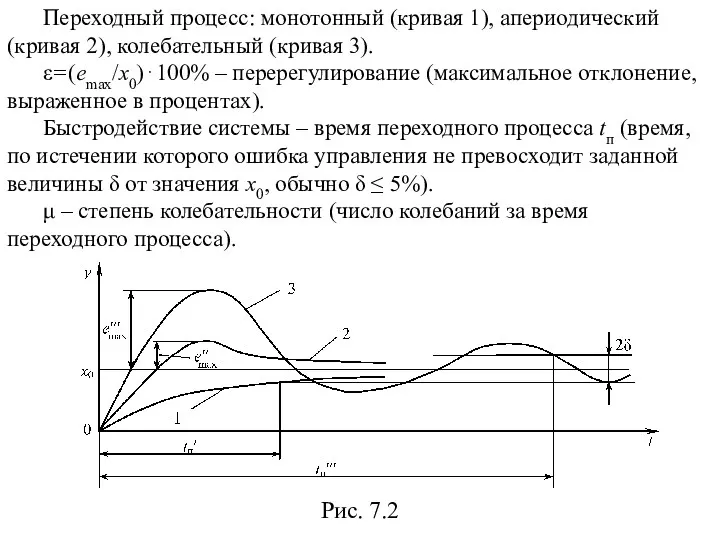
Переходный процесс: монотонный (кривая 1), апериодический (кривая 2), колебательный (кривая 3).
ε=(emax/x0)⋅100%
Переходный процесс: монотонный (кривая 1), апериодический (кривая 2), колебательный (кривая 3).
ε=(emax/x0)⋅100%
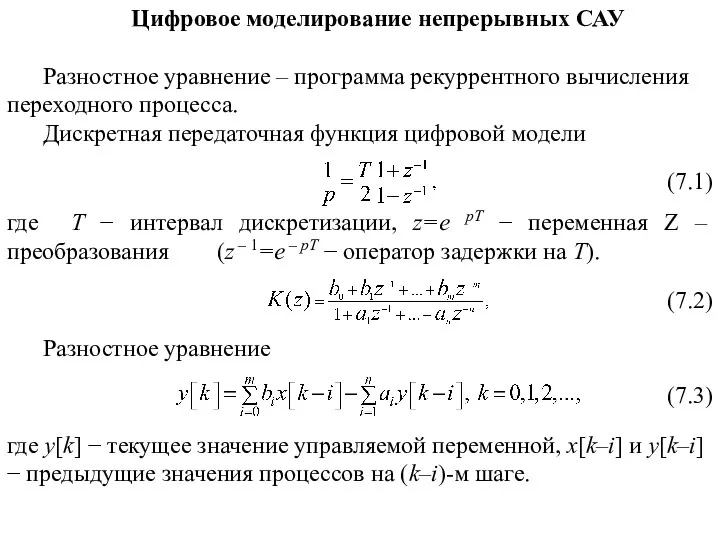
Цифровое моделирование непрерывных САУ
Разностное уравнение – программа рекуррентного вычисления переходного процесса.
Дискретная
Цифровое моделирование непрерывных САУ
Разностное уравнение – программа рекуррентного вычисления переходного процесса.
Дискретная
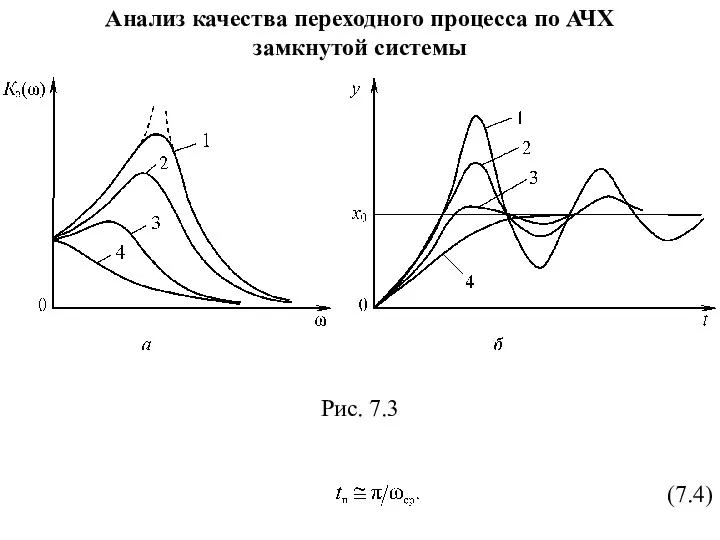
Анализ качества переходного процесса по АЧХ замкнутой системы
Рис. 7.3
Анализ качества переходного процесса по АЧХ замкнутой системы
Рис. 7.3
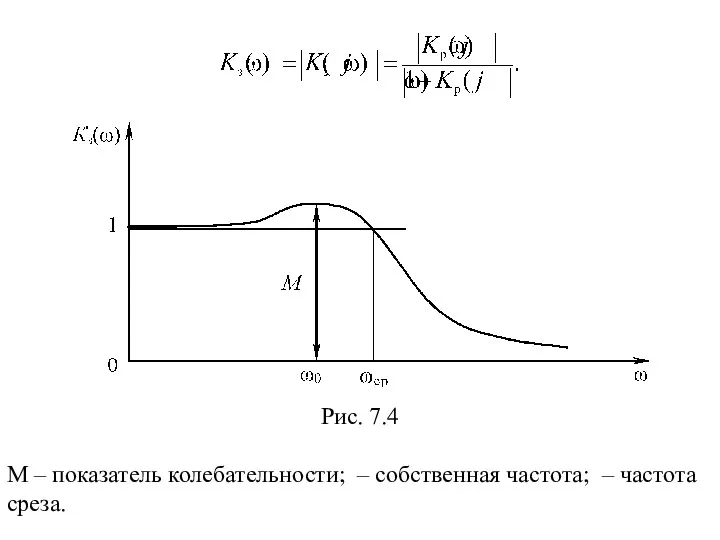
Рис. 7.4
M – показатель колебательности; – собственная частота; – частота среза.
Рис. 7.4
M – показатель колебательности; – собственная частота; – частота среза.
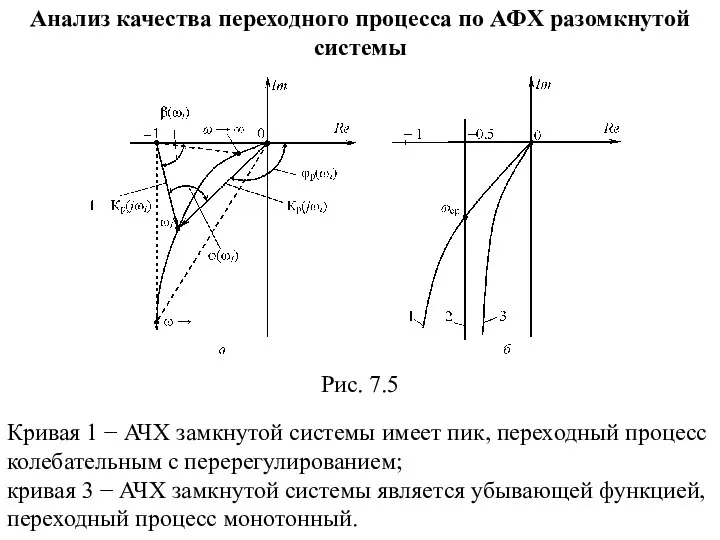
Рис. 7.5
Кривая 1 − АЧХ замкнутой системы имеет пик, переходный процесс
Рис. 7.5
Кривая 1 − АЧХ замкнутой системы имеет пик, переходный процесс
Оценка качества переходного процесса по ЛАХ
разомкнутой системы
Рис. 7.6 − Универсальные переходные
Оценка качества переходного процесса по ЛАХ
разомкнутой системы
Рис. 7.6 − Универсальные переходные
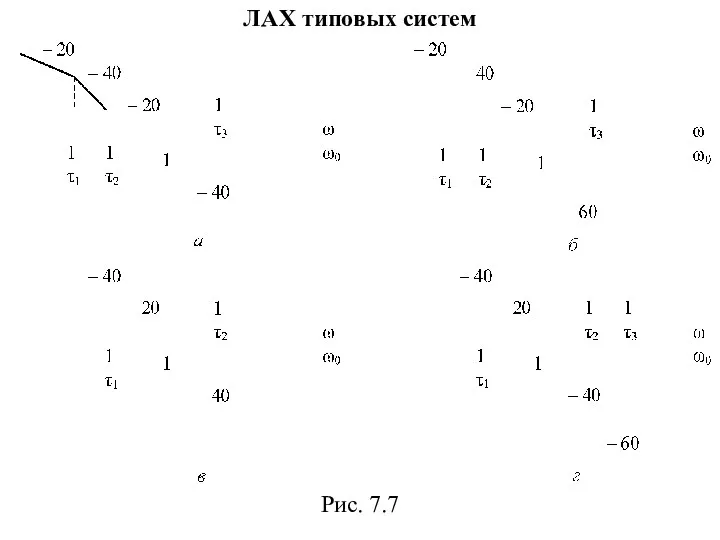
ЛАХ типовых систем
Рис. 7.7
ЛАХ типовых систем
Рис. 7.7
Тема 11: «Точность автоматических систем при типовых воздействиях»
Содержание
Статические ошибки
Динамические ошибки
Содержание
Статические ошибки
Динамические ошибки
Точность САУ при типовых воздействиях
Точность АС – величина ошибки в установившемся
Точность САУ при типовых воздействиях
Точность АС – величина ошибки в установившемся
Статические ошибки
Статическая ошибка – ошибка системы при постоянном (ступенчатом) воздействии x(t)=x0=const.
Ошибка
Статические ошибки
Статическая ошибка – ошибка системы при постоянном (ступенчатом) воздействии x(t)=x0=const.
Ошибка
Динамические ошибки
Динамическая ошибка eд(t) – ошибка, характеризующая точность замкнутой системы при
Динамические ошибки
Динамическая ошибка eд(t) – ошибка, характеризующая точность замкнутой системы при
Установившееся значение ошибки
Для статических систем (i=0) C0=1/(1+K0), для астатических систем C0=0.
Установившееся значение ошибки
Для статических систем (i=0) C0=1/(1+K0), для астатических систем C0=0.
Установившееся значение ошибки
i = 1 (астатическая система первого порядка):
C1=1/K1, так как
Установившееся значение ошибки
i = 1 (астатическая система первого порядка):
C1=1/K1, так как
Для астатической системы второго порядка скоростная ошибка равна нулю (C0=C1=0).
Динамические ошибки
Для астатической системы второго порядка скоростная ошибка равна нулю (C0=C1=0).
Динамические ошибки
Откуда C2/2=1/K2, так как C0=C1=0.
Ошибка по ускорению в системе второго
Откуда C2/2=1/K2, так как C0=C1=0.
Ошибка по ускорению в системе второго
Тема 12: «Точность автоматических систем при воздействии помех»
Содержание
Составляющие ошибки слежения
Дисперсия динамической
Тема 12: «Точность автоматических систем при воздействии помех»
Содержание
Составляющие ошибки слежения
Дисперсия динамической
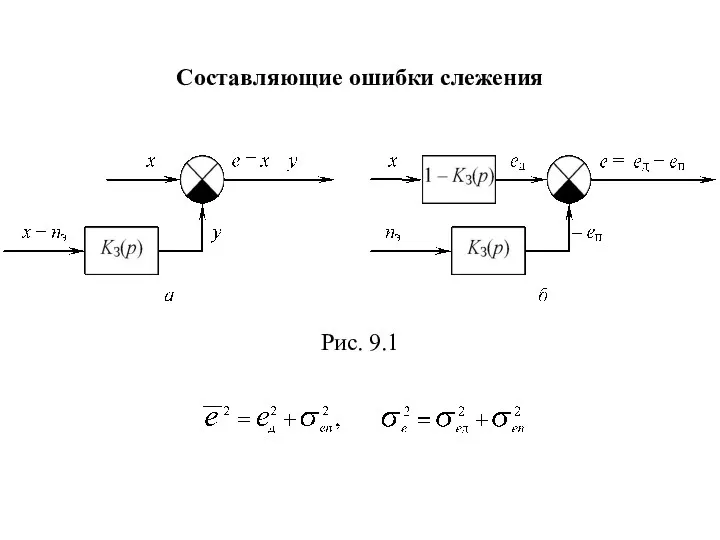
Составляющие ошибки слежения
Рис. 9.1
Составляющие ошибки слежения
Рис. 9.1
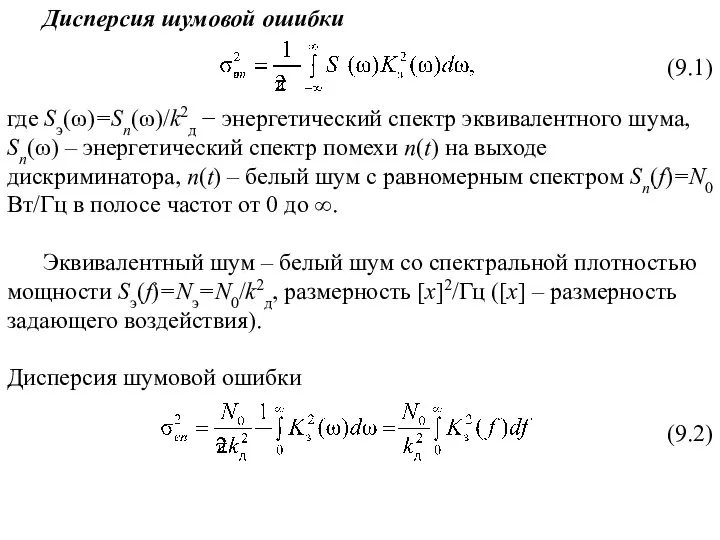
Дисперсия шумовой ошибки
где Sэ(ω)=Sn(ω)/k2д − энергетический спектр эквивалентного шума, Sn(ω) –
Дисперсия шумовой ошибки
где Sэ(ω)=Sn(ω)/k2д − энергетический спектр эквивалентного шума, Sn(ω) –
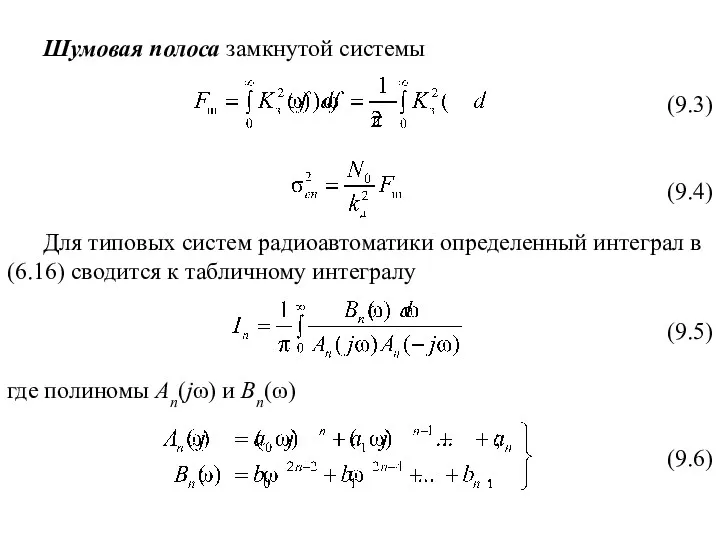
Шумовая полоса замкнутой системы
Для типовых систем радиоавтоматики определенный интеграл в (6.16)
Шумовая полоса замкнутой системы
Для типовых систем радиоавтоматики определенный интеграл в (6.16)
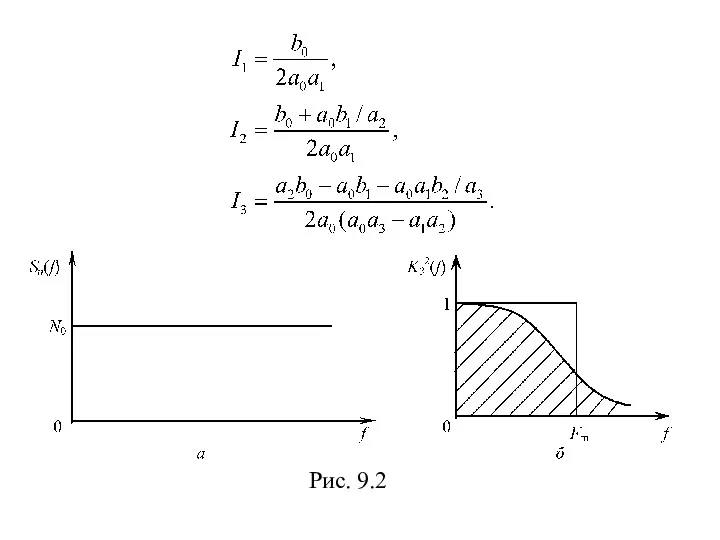
Рис. 9.2
Рис. 9.2
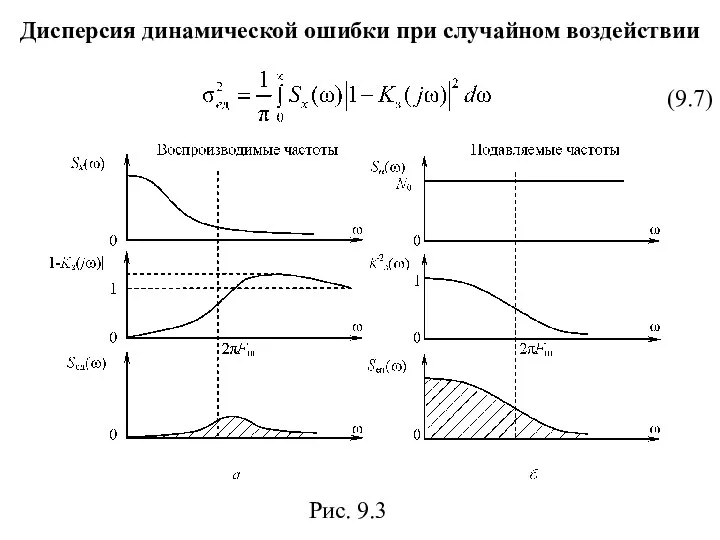
Дисперсия динамической ошибки при случайном воздействии
Рис. 9.3
Дисперсия динамической ошибки при случайном воздействии
Рис. 9.3
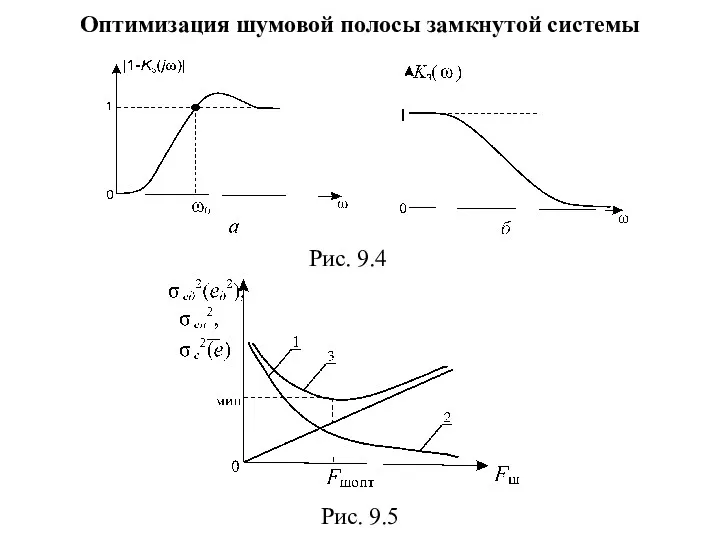
Оптимизация шумовой полосы замкнутой системы
Рис. 9.4
Рис. 9.5
Оптимизация шумовой полосы замкнутой системы
Рис. 9.4
Рис. 9.5
Тема 15: «Методы анализа нелинейных систем
радиоавтоматики»
Содержание
Анализ нелинейной системы ЧАП
Графо-аналитический
радиоавтоматики»
Содержание
Анализ нелинейной системы ЧАП
Графо-аналитический
Методы анализа нелинейных систем радиоавтоматики
метод фазовой плоскости
метод кусочно-линейной аппроксимации
метод гармонической линеаризации
метод
Методы анализа нелинейных систем радиоавтоматики
метод фазовой плоскости
метод кусочно-линейной аппроксимации
метод гармонической линеаризации
метод

Анализ нелинейной системы ЧАП
Рис.10.1 – Структурная схема системы ЧАП
Дифференциальное уравнение системы
В
Анализ нелинейной системы ЧАП
Рис.10.1 – Структурная схема системы ЧАП
Дифференциальное уравнение системы
В
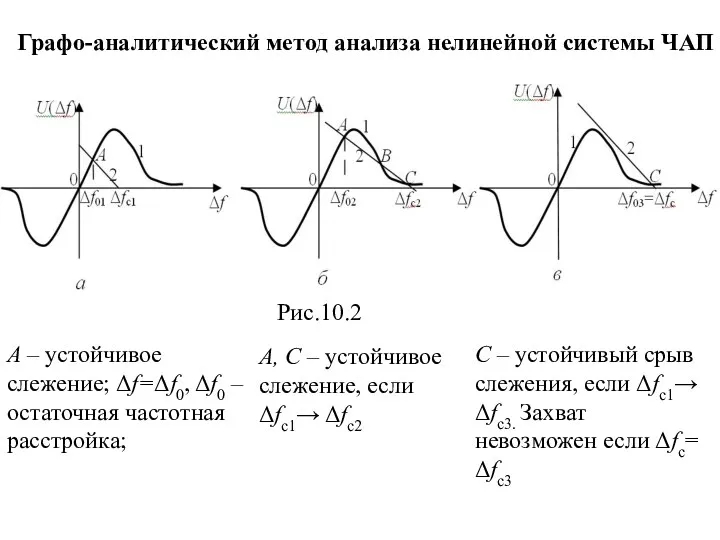
Графо-аналитический метод анализа нелинейной системы ЧАП
A – устойчивое слежение; Δf=Δf0, Δf0
Графо-аналитический метод анализа нелинейной системы ЧАП
A – устойчивое слежение; Δf=Δf0, Δf0
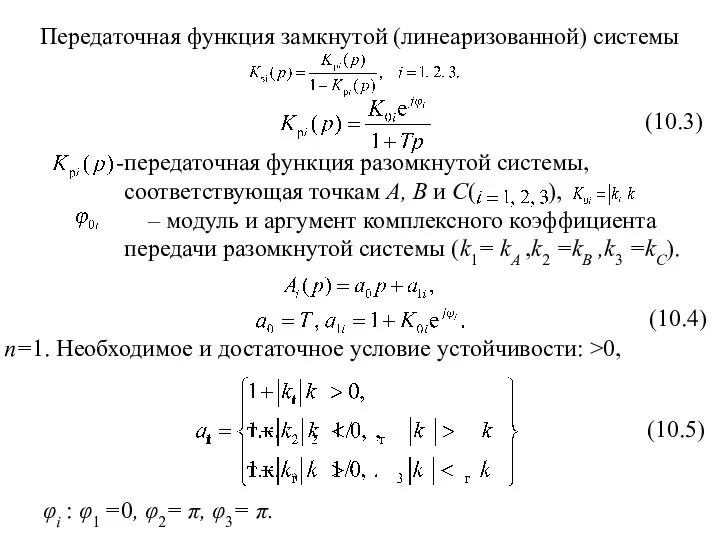
Передаточная функция замкнутой (линеаризованной) системы
n=1. Необходимое и достаточное условие устойчивости: >0,
Передаточная функция замкнутой (линеаризованной) системы
n=1. Необходимое и достаточное условие устойчивости: >0,
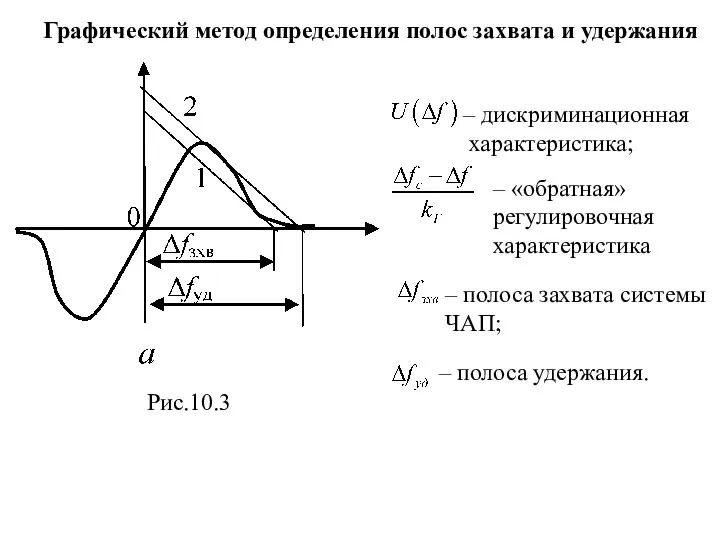
Графический метод определения полос захвата и удержания
– дискриминационная
характеристика;
– «обратная» регулировочная
Графический метод определения полос захвата и удержания
– дискриминационная
характеристика;
– «обратная» регулировочная
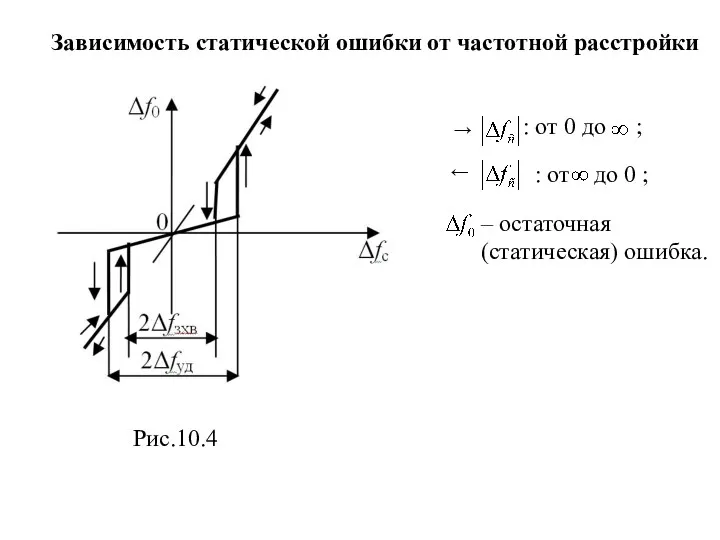
Зависимость статической ошибки от частотной расстройки
Рис.10.4
→
: от 0 до ;
←
: от
Зависимость статической ошибки от частотной расстройки
Рис.10.4
→
: от 0 до ;
←
: от
Тема 16: «Анализ дискретных систем радиоавтоматики»
Тема 17: «Показатели качества управления дискретных
Тема 17: «Показатели качества управления дискретных
Математическое описание дискретных АС
Дискретное преобразование Лапласа записывается в виде
Х(z) – Z-преобразование
Математическое описание дискретных АС
Дискретное преобразование Лапласа записывается в виде
Х(z) – Z-преобразование
Обобщенная структурная схема линейной дискретной САУ
Рис.11.1
Обобщенная структурная схема линейной дискретной САУ
Рис.11.1
Анализ точности дискретной САУ при детерминированном
воздействии
С0, С1 и С2–коэффициенты ошибок по
Анализ точности дискретной САУ при детерминированном
воздействии
С0, С1 и С2–коэффициенты ошибок по
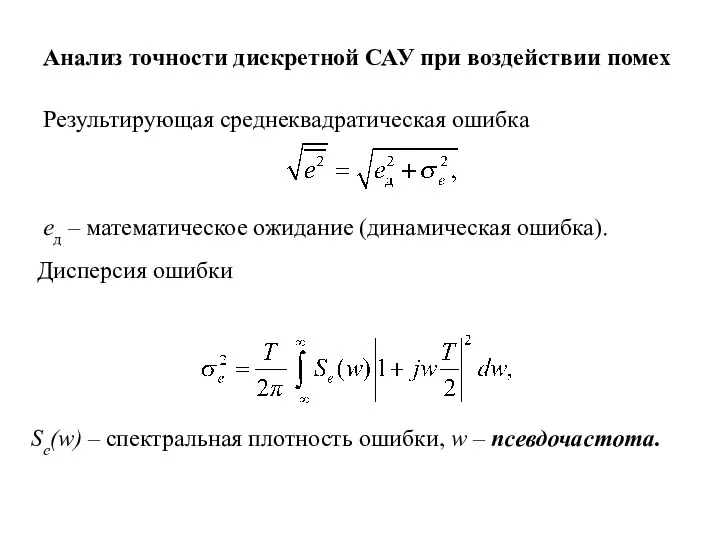
Анализ точности дискретной САУ при воздействии помех
Результирующая среднеквадратическая ошибка
eд – математическое
Анализ точности дискретной САУ при воздействии помех
Результирующая среднеквадратическая ошибка
eд – математическое
Тема 2: «Системы автоматической регулировки усиления (АРУ)»
Содержание
Система АРУ с управлением по
Содержание
Система АРУ с управлением по
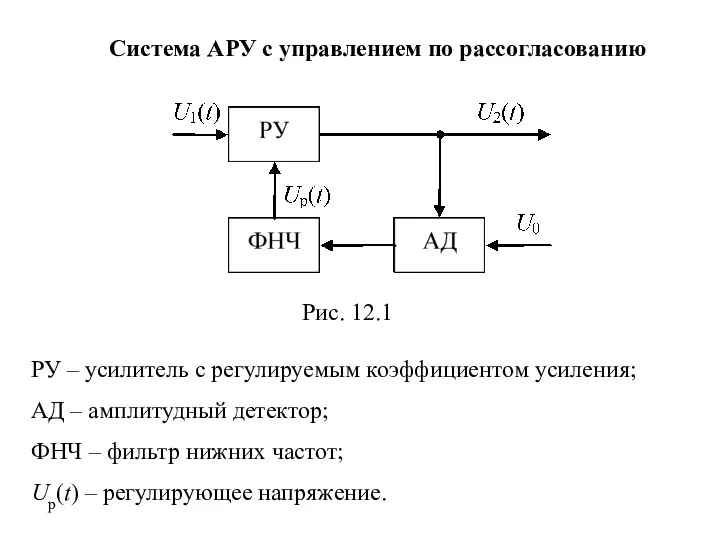
Система АРУ с управлением по рассогласованию
Рис. 12.1
РУ – усилитель с регулируемым
Система АРУ с управлением по рассогласованию
Рис. 12.1
РУ – усилитель с регулируемым
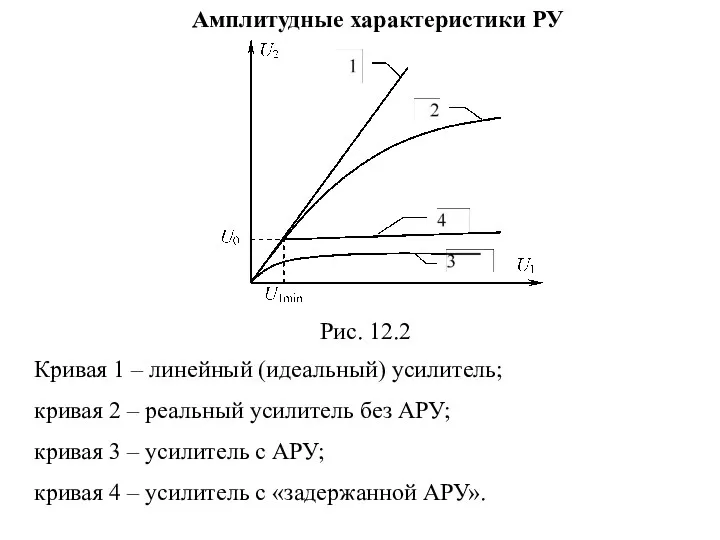
Амплитудные характеристики РУ
Рис. 12.2
Кривая 1 – линейный (идеальный) усилитель;
кривая 2 –
Амплитудные характеристики РУ
Рис. 12.2
Кривая 1 – линейный (идеальный) усилитель;
кривая 2 –
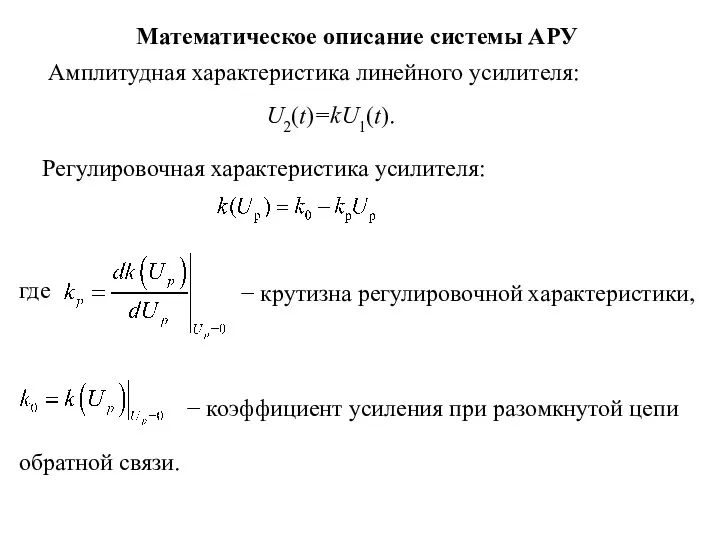
Математическое описание системы АРУ
Амплитудная характеристика линейного усилителя:
U2(t)=kU1(t).
Регулировочная характеристика усилителя:
,
где
− крутизна регулировочной
Математическое описание системы АРУ
Амплитудная характеристика линейного усилителя:
U2(t)=kU1(t).
Регулировочная характеристика усилителя:
,
где
− крутизна регулировочной
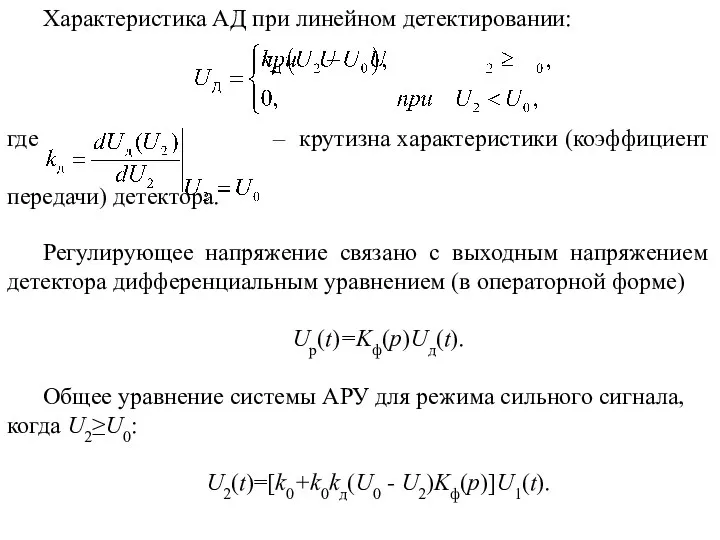
Характеристика АД при линейном детектировании:
где – крутизна характеристики (коэффициент передачи) детектора.
Регулирующее
Характеристика АД при линейном детектировании:
где – крутизна характеристики (коэффициент передачи) детектора.
Регулирующее
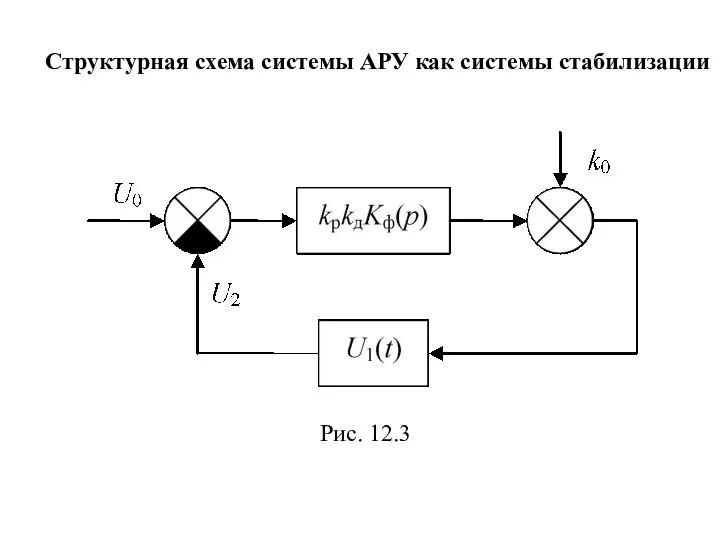
Структурная схема системы АРУ как системы стабилизации
Рис. 12.3
Структурная схема системы АРУ как системы стабилизации
Рис. 12.3
Тема 3: «Системы частотной автоподстройки (ЧАП)»
Содержание
Функциональная схема системы частотной автоподстройки
Принцип
Содержание
Функциональная схема системы частотной автоподстройки
Принцип
Функциональная схема системы частотной автоподстройки
Рис. 13.1
См – смеситель, ПГ –
Функциональная схема системы частотной автоподстройки
Рис. 13.1
См – смеситель, ПГ –
Принцип действия системы ЧАП
Пример. Стабилизация промежуточной частоты супергетеродинного приемника
uc(t) – принятый
Принцип действия системы ЧАП
Пример. Стабилизация промежуточной частоты супергетеродинного приемника
uc(t) – принятый
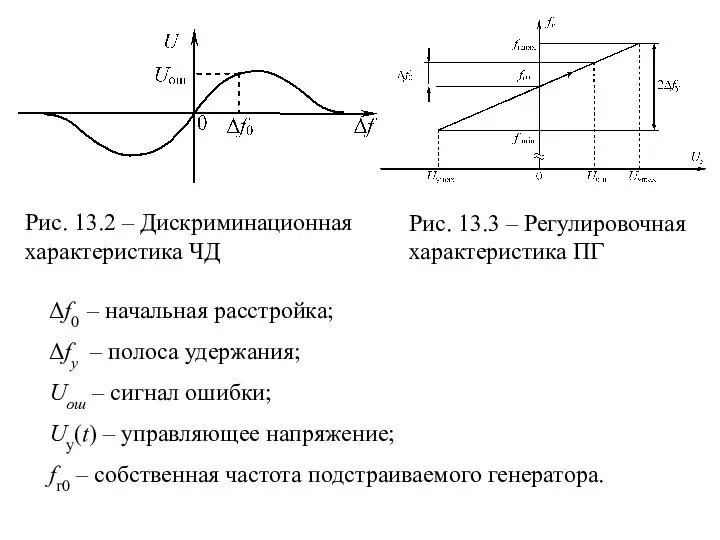
Рис. 13.2 – Дискриминационная характеристика ЧД
Рис. 13.3 – Регулировочная характеристика ПГ
Δf0
Рис. 13.2 – Дискриминационная характеристика ЧД
Рис. 13.3 – Регулировочная характеристика ПГ
Δf0
Тема 4: «Системы фазовой автоподстройки (ФАП)»
Содержание
Применение системы ФАП
Функциональная схема
Содержание
Применение системы ФАП
Функциональная схема
Применение системы ФАП
следящие фильтры доплеровских систем измерения скорости;
стабилизация промежуточной
Применение системы ФАП
следящие фильтры доплеровских систем измерения скорости;
стабилизация промежуточной
Функциональная схема системы фазовой автоподстройки
Рис. 14.1
ФД – фазовый дискриминатор;
ПГ – подстраиваемый
Функциональная схема системы фазовой автоподстройки
Рис. 14.1
ФД – фазовый дискриминатор;
ПГ – подстраиваемый
Дискриминационная характеристика фазового дискриминатора
uc(t)=umcsinϕc(t)=umcsin(ωct+ϕc0),
uг(t)=umгcosϕг(t)=umгcos(ωгt+ϕг0).
Рис. 14.2
Дискриминационная характеристика фазового дискриминатора
uc(t)=umcsinϕc(t)=umcsin(ωct+ϕc0),
uг(t)=umгcosϕг(t)=umгcos(ωгt+ϕг0).
Рис. 14.2
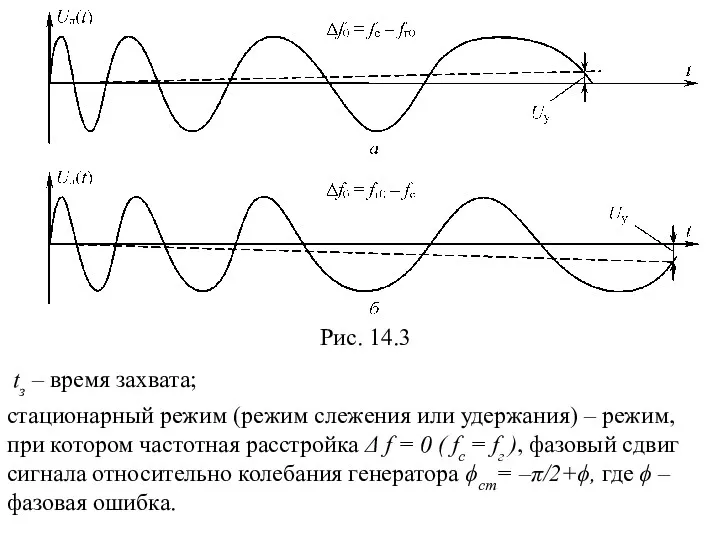
Рис. 14.3
tз – время захвата;
стационарный режим (режим слежения или удержания) –
Рис. 14.3
tз – время захвата;
стационарный режим (режим слежения или удержания) –
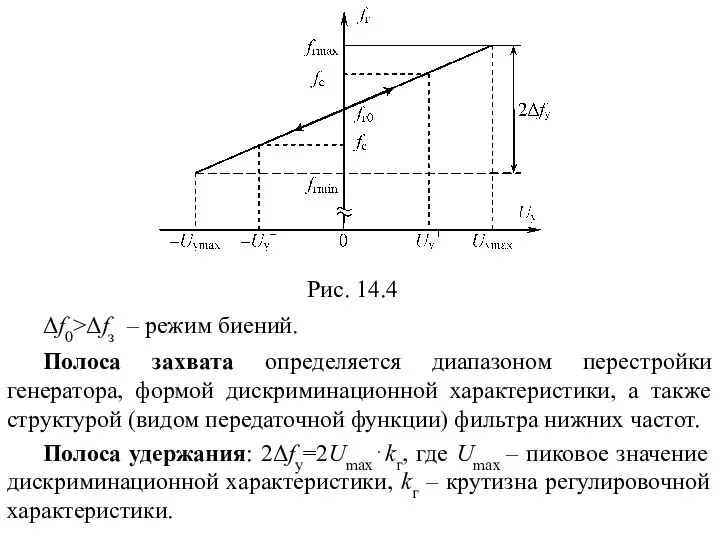
Рис. 14.4
Δf0>Δfз – режим биений.
Полоса захвата определяется диапазоном перестройки генератора, формой
Рис. 14.4
Δf0>Δfз – режим биений.
Полоса захвата определяется диапазоном перестройки генератора, формой
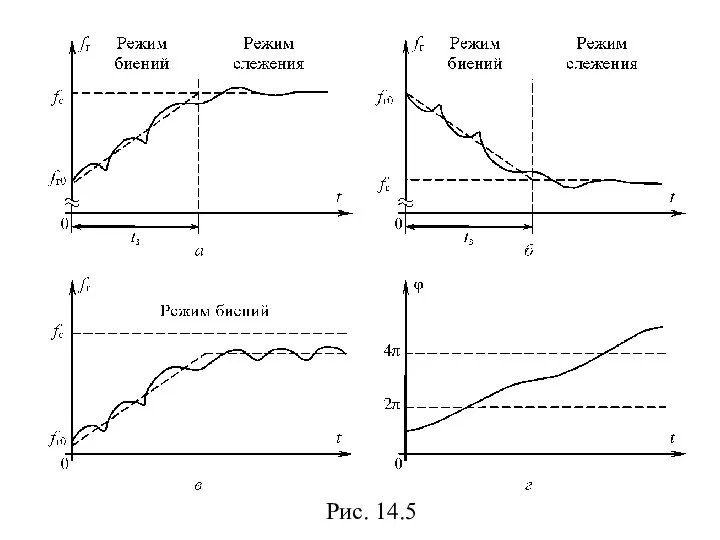
Рис. 14.5
Рис. 14.5
Примеры использования системы ФАП
Рис. 14.6 – Функциональная схема супергетеродинного приёмника
См –
Примеры использования системы ФАП
Рис. 14.6 – Функциональная схема супергетеродинного приёмника
См –
Линейная модель системы ФАП
Линейная аппроксимация дискриминационной характеристики:
U(ϕ)≅kдϕ (ϕ << π).
kд –
Линейная модель системы ФАП
Линейная аппроксимация дискриминационной характеристики:
U(ϕ)≅kдϕ (ϕ << π).
kд –
Тема 5: «Системы слежения за задержкой
сигнала (ССЗ)»
Содержание
Дискриминационная характеристика временного дискриминатора
Временной
сигнала (ССЗ)»
Содержание
Дискриминационная характеристика временного дискриминатора
Временной

Дискриминационная характеристика временного дискриминатора
Рис. 15.1
Дискриминационная характеристика временного дискриминатора
Рис. 15.1
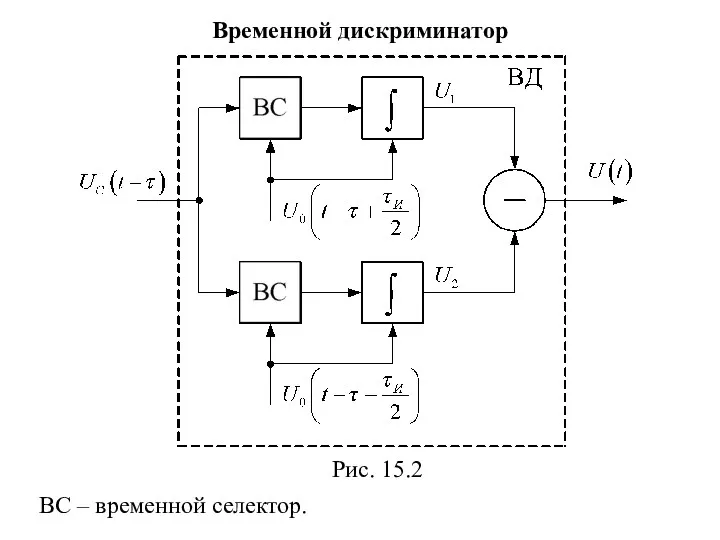
Временной дискриминатор
Рис. 15.2
ВС – временной селектор.
Временной дискриминатор
Рис. 15.2
ВС – временной селектор.
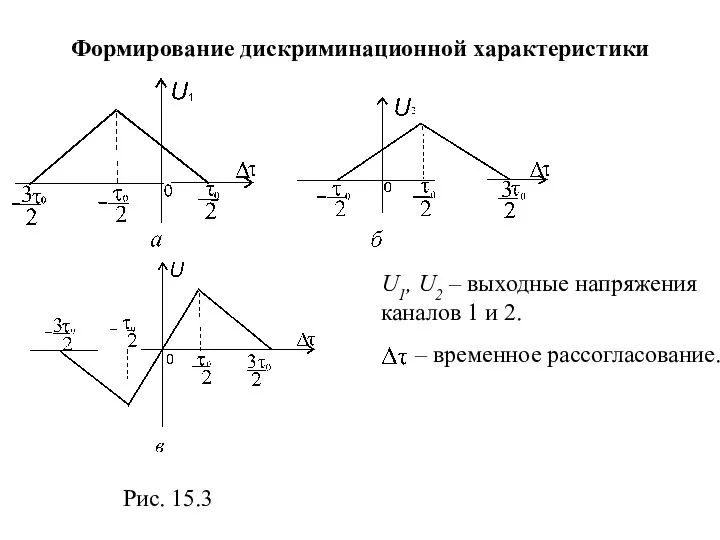
Формирование дискриминационной характеристики
Рис. 15.3
U1, U2 – выходные напряжения каналов 1 и
Формирование дискриминационной характеристики
Рис. 15.3
U1, U2 – выходные напряжения каналов 1 и
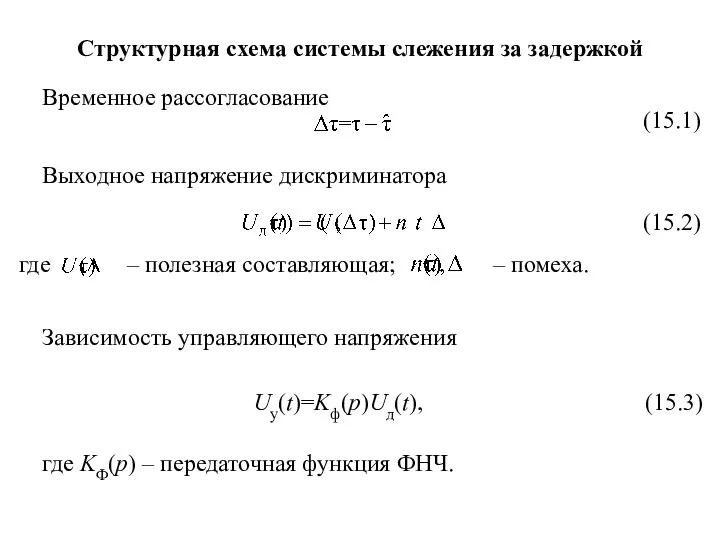
Структурная схема системы слежения за задержкой
Временное рассогласование
Выходное напряжение дискриминатора
где
– полезная составляющая;
Структурная схема системы слежения за задержкой
Временное рассогласование
Выходное напряжение дискриминатора
где
– полезная составляющая;
Регулировочная характеристика схемы управляемой задержки
где
– значение задержки Uу=0,
– крутизна регулировочной характеристики
Регулировочная характеристика схемы управляемой задержки
где
– значение задержки Uу=0,
– крутизна регулировочной характеристики
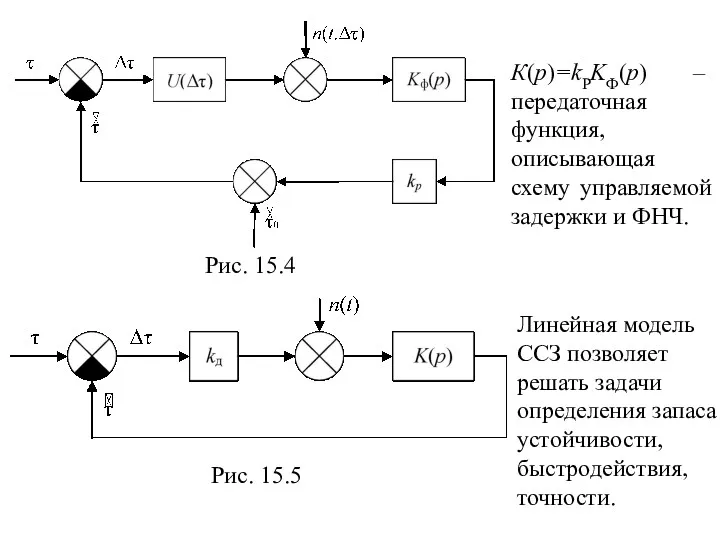
Рис. 15.4
Рис. 15.5
К(p)=kPKФ(p) – передаточная функция, описывающая схему управляемой задержки и
Рис. 15.4
Рис. 15.5
К(p)=kPKФ(p) – передаточная функция, описывающая схему управляемой задержки и
Тема 6: «Системы слежения за направлением прихода сигналов (ССН)»
Содержание
Амплитудный пеленгатор, использующий
Содержание
Амплитудный пеленгатор, использующий
Амплитудный пеленгатор, использующий суммарно-разностный метод пеленгования.
Рис. 16.1
О1 и О2 – облучатели;
Амплитудный пеленгатор, использующий суммарно-разностный метод пеленгования.
Рис. 16.1
О1 и О2 – облучатели;
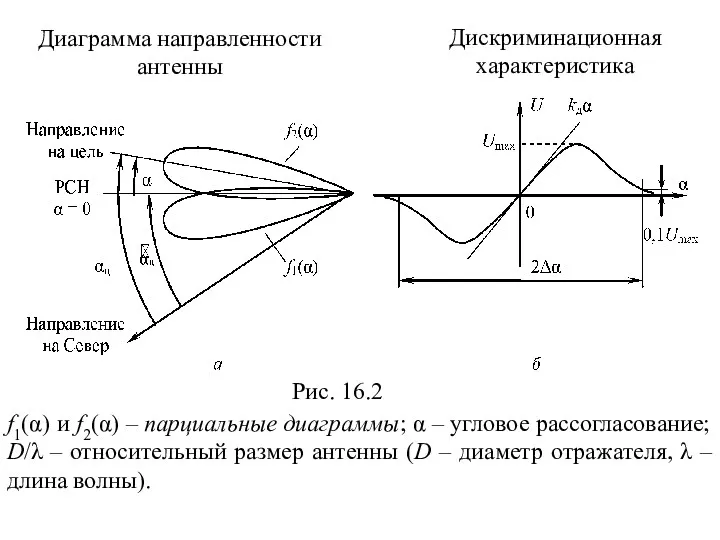
Диаграмма направленности
антенны
Дискриминационная характеристика
Рис. 16.2
f1(α) и f2(α) – парциальные диаграммы; α
Диаграмма направленности
антенны
Дискриминационная характеристика
Рис. 16.2
f1(α) и f2(α) – парциальные диаграммы; α
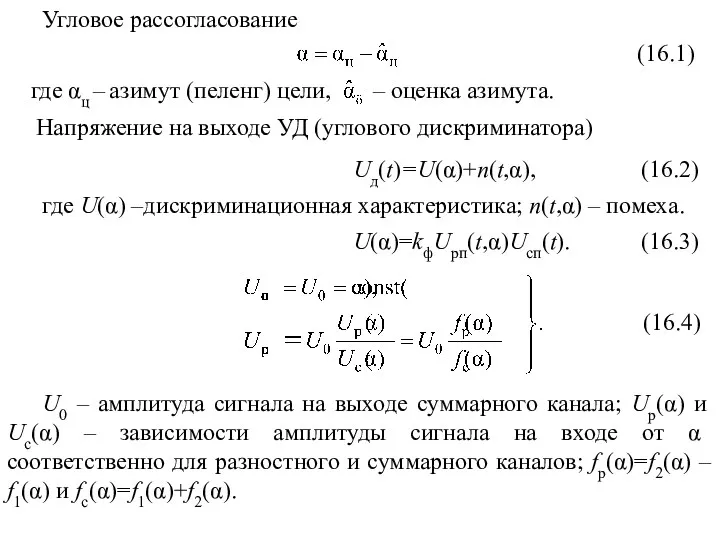
Угловое рассогласование
где αц – азимут (пеленг) цели,
– оценка азимута.
Напряжение на
Угловое рассогласование
где αц – азимут (пеленг) цели,
– оценка азимута.
Напряжение на
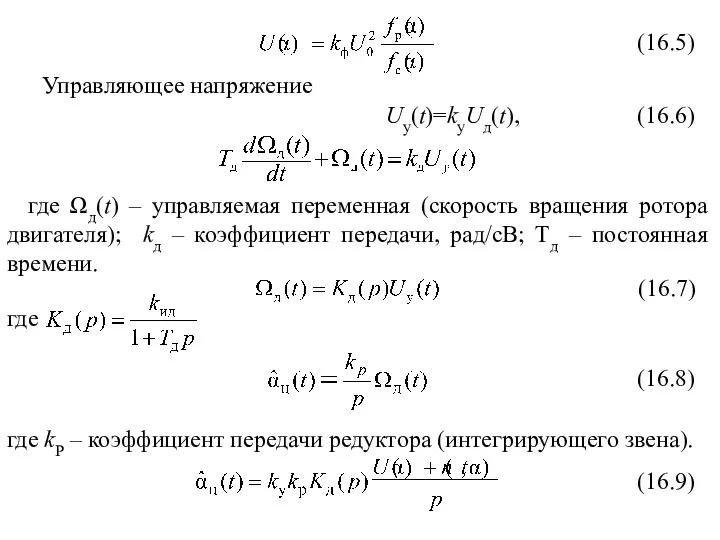
Управляющее напряжение
Uу(t)=kуUд(t), (16.6)
где Ωд(t) – управляемая переменная (скорость вращения ротора двигателя);
Управляющее напряжение
Uу(t)=kуUд(t), (16.6)
где Ωд(t) – управляемая переменная (скорость вращения ротора двигателя);
 Эстафета. Информатика
Эстафета. Информатика Star-shaped local area network
Star-shaped local area network Понятие алгоритма. Свойства алгоритмов
Понятие алгоритма. Свойства алгоритмов Внешние устройства ПК
Внешние устройства ПК Проект информационной системы по ведению учёта подписной деятельности почтовым отделением
Проект информационной системы по ведению учёта подписной деятельности почтовым отделением Интернет: вред и польза
Интернет: вред и польза Структура бизнес-процесса
Структура бизнес-процесса Графический исполнитель Муравей и компания
Графический исполнитель Муравей и компания Publisher - основы издательской деятельности
Publisher - основы издательской деятельности Puppet – configuration management tool
Puppet – configuration management tool Транзакции. Часть 2
Транзакции. Часть 2 Язык sql
Язык sql BlaBlaCar. Communication Plan
BlaBlaCar. Communication Plan Resilience Modeling and Analysis (RMA) методологія
Resilience Modeling and Analysis (RMA) методологія PostgreSQL - система объектно-реляционных баз данных
PostgreSQL - система объектно-реляционных баз данных Разработка информационного обеспечения для поддержки деятельности предприятия сферы услуг
Разработка информационного обеспечения для поддержки деятельности предприятия сферы услуг Парадигма якості в програмній інженерії
Парадигма якості в програмній інженерії Introduction of Mobile. Cloud Computing
Introduction of Mobile. Cloud Computing Презентация по теме Сканеры
Презентация по теме Сканеры Адресация в компьютерных сетях
Адресация в компьютерных сетях Общие сведения о языке программирования Паскаль. Начала программирования. (9 класс)
Общие сведения о языке программирования Паскаль. Начала программирования. (9 класс) Создание презентации в PowerPoint
Создание презентации в PowerPoint Regression testing
Regression testing Научно-популярные издания. Особенности текста и оформления
Научно-популярные издания. Особенности текста и оформления Анализ функциональности старых систем
Анализ функциональности старых систем Применение дистанционных технологий при обучении детей с ОВЗ
Применение дистанционных технологий при обучении детей с ОВЗ Киберспорт
Киберспорт Alcatel 1000 s12 digital switching system
Alcatel 1000 s12 digital switching system