- Системы управления химико-технологическими процессами (СУХТП)

Содержание
- 2. СОСТАВ КУРСА ЛЕКЦИИ – 36 ЧАСОВ ЛАБОРАТОРНЫЕ ЗАНЯТИЯ – 18 часов КУРСОВОЕ ПРОЕКТИРОВАНИЕ САМОСТОЯТЕЛЬНАЯ РАБОТА –
- 3. РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА БЕСПАЛОВ, А.В. СИСТЕМЫ УПРАВЛЕНИЯ ХИМИКО-ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ: УЧЕБНИК ДЛЯ ВУЗОВ/ А.В. БЕСПАЛОВ, Н.И. ХАРИТОНОВ. -
- 4. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ АВТОМАТИЗАЦИЯ – ЗАМЕНА РЯДА ФУНКЦИЙ ЧЕЛОВЕКА ПО КОНТРОЛЮ И УПРАВЛЕНИЮ В ДИНАМИЧЕСКИХ
- 5. О ТЕРМИНОЛОГИИ СИСТЕМА – МНОЖЕСТВО СВЯЗАННЫХ МЕЖДУ СОБОЙ ЭЛЕМЕНТОВ, ПРЕДНАЗНАЧЕННЫХ ДЛЯ ДОСТИЖЕНИЯ ОБЩЕЙ ЦЕЛИ. ЭЛЕМЕНТ СИСТЕМЫ
- 6. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА: В ВЫПОЛНЕНИИ ФУНКЦИЙ АВТОМАТЧЕСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ УЧАСТВУЕТ ЧЕЛОВЕК АВТОМАТИЧЕСКАЯ
- 7. ИЕРАРХИЧЕСКАЯ СТРУКТУРА СИСТЕМЫ АВТОМАТИЗАЦИИ
- 8. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ АРМ – АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА ТП ЛАСР (АСР) – ЛОКАЛЬНАЯ АВТОМАТИЧЕСКАЯ
- 9. СТРУКТУРА ДВУХУРОВНЕВОЙ СИСТЕМЫ УПРАВЛЕНИЯ
- 10. ТИПОВАЯ СТРУКТУРА ЛОКАЛЬНОЙ АСР Х вых – регулируемый параметр Х зд – заданное значение регулируемого параметра
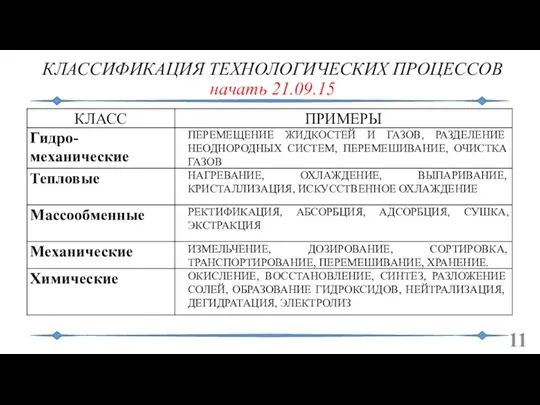
- 11. КЛАССИФИКАЦИЯ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ начать 21.09.15
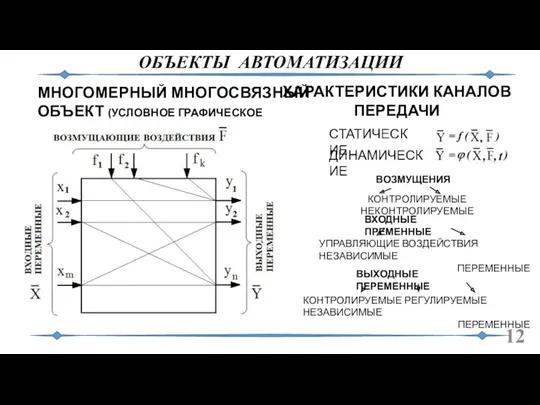
- 12. ОБЪЕКТЫ АВТОМАТИЗАЦИИ ХАРАКТЕРИСТИКИ КАНАЛОВ ПЕРЕДАЧИ СТАТИЧЕСКИЕ ДИНАМИЧЕСКИЕ ВОЗМУЩЕНИЯ КОНТРОЛИРУЕМЫЕ НЕКОНТРОЛИРУЕМЫЕ ВХОДНЫЕ ПРЕМЕННЫЕ УПРАВЛЯЮЩИЕ ВОЗДЕЙСТВИЯ НЕЗАВИСИМЫЕ ПЕРЕМЕННЫЕ
- 13. МОДЕЛИРОВАНИЕ ОБЪЕКТОВ АВТОМАТИЗАЦИИ МОДЕЛИ ОБЪЕКТОВ ФИЗИЧЕСКИЕ МАТЕМАТИЧЕСКИЕ МЕНТАЛЬНЫЕ МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА: СИСТЕМА УРАВНЕНИЙ, СТАВЯЩИХ В СООТВЕТСТВИЕ
- 14. СВОЙСТВА ОБЪЕКТОВ АВТОМАТИЗАЦИИ ЕМКОСТЬ – СПОСОБНОСТЬ ОБЪЕКТА АККУМУЛИРОВАТЬ ВЕЩЕСТВО ИЛИ ЭНЕРГИЮ НАГРУЗКА – КОЛИЧЕСТВО ВЕЩЕСТВА ИЛИ
- 15. ТИПОВЫЕ ЗВЕНЬЯ ОБЪЕКТОВ АВТОМАТИЗАЦИИ АСТАТИЧЕСКОЕ (ИНТЕГРИРУЮЩЕЕ) ЗВЕНО ПЕРВОГО ПОРЯДКА УРАВНЕНИЕ ДИНАМИКИ УРАВНЕНИЕ СТАТИКИ - ПОСТОЯННАЯ ВРЕМЕНИ
- 16. ТИПОВЫЕ ЗВЕНЬЯ ОБЪЕКТОВ АВТОМАТИЗАЦИИ СТАТИЧЕСКОЕ (ИНЕРЦИОННОЕ, АПЕРИОДИЧЕСКОЕ) ЗВЕНО ПЕРВОГО ПОРЯДКА УРАВНЕНИЯ СТАТИКИ УРАВНЕНИЕ ДИНАМИКИ
- 17. ЗВЕНО ЧИСТОГО ЗАПАЗДЫВНИЯ
- 18. АПЕРИОДИЧЕСКОЕ ЗВЕНО ВТОРОГО ПОРЯДКА ГРАФИЧЕСКАЯ АППРОКСИМАЦИЯ ЗВЕНОМ ПЕРВОГО ПОРЯДКА С ЗАПАЗДЫВАНИЕМ
- 19. МЕТОДЫ ОПРЕДЕЛЕНИЯ СВОЙСТВ ОБЪЕКТОВ АНАЛИТИЧЕСКИЕ ЭКСПЕРИМЕНТАЛЬНЫЕ ВОЗМУЩАЮЩИЕ ВОЗДЕЙСТВИЯ СТУПЕНЧАТОЕ ИМПУЛЬСНОЕ СИНУСОИДАЛЬНОЕ (НА ОСНОВЕ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ) ДЛЯ
- 20. ПОНЯТИЕ О ПЕРЕДАТОЧНОЙ ФУНКЦИИ ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ ОБЪЕКТА ОПЕРАТОР ЛАПЛАСА ПОСЛЕ ПОДСТАНОВКИ И ПРЕОБРАЗОВАНИЙ ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ПО
- 21. ПОНЯТИЕ О ПЕРЕДАТОЧНОЙ ФУНКЦИИ (продолжение)
- 22. ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ДИНАМИЧЕСКОГО ОБЪЕКТА (НА ПРИМЕРЕ МЕХАНИЧЕСКОЙ СИСТЕМЫ)
- 23. ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ПЕРЕХОДНЫЕ ХАРАКТЕРИСТИКИ ВХОДНОЙ СИГНАЛ БЕЗЫНЕРЦИОННОЕ (УСИЛИТЕЛЬНОЕ) ЗВЕНО (ВРЕМЕННАЯ ОБЛАСТЬ)
- 24. ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ПЕРЕХОДНЫЕ ХАРАКТЕРИСТИКИ ИНТЕГРИРУЮЩЕЕ ЗВЕНО АПЕРИОДИЧЕСКОЕ (ИНЕРЦИОННОЕ) ЗВЕНО 1-го ПОРЯДКА
- 25. АЛГЕБРА ПЕРЕДАТОЧНЫХ ФУНКЦИЙ
- 26. П Р И М Е Р ОТРИЦАТЕЛЬНАЯ ОБРАТНАЯ СВЯЗЬ ОБЕСПЕЧИВАЕТ УСТОЙЧИВОСТЬ ДИНАМИЧЕСКИХ СИСТЕМ
- 27. ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ ИЗМЕРЕНИЙ ФИЗИЧЕСКАЯ ВЕЛИЧИНА – СВОЙСТВО ПРЕДМЕТОВ ИЛИ ЯВЛЕНИЙ, ОДИНАКОВОЕ ДЛЯ НИХ В КАЧЕСТВЕННОМ
- 28. СТРУКТУРА ИЗМЕРИТЕЛЬНОЙ ЦЕПИ ПП – первичный преобразователь; ПрП – промежуточный преобразователь; ИП – измерительный прибор. y1
- 29. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ПРОЦЕССА И СРЕДСТВ ИЗМЕРЕНИЙ ПОГРЕШНОСТЬ ИЗМЕРЕНИЯ – разность между результатом измерения и опорным значением.
- 30. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ПРОЦЕССА И СРЕДСТВ ИЗМЕРЕНИЙ ЧУВСТВИТЕЛЬНОСТЬ ИЗМЕРИТЕЛЬНОГО ПРИБОРА - ОТНОШЕНИЕ ИЗМЕНЕНИЯ СИГНАЛА НА ВЫХОДЕ ИЗМЕРИТЕЛЬНОГО
- 31. ТЕХНИЧЕСКИЕ ИЗМЕРЕНИЯ СТАТИЧЕСКИЕ ДИНАМИЧЕСКИЕ ПРЯМЫЕ КОСВЕННЫЕ МЕТОДЫ ТЕХНИЧЕСКИХ ИЗМЕРЕНИЙ ВИДЫ ТЕХНИЧЕСКИХ ИЗМЕРЕНИЙ СРАВНЕНИЕ С МЕРОЙ МЕТОД
- 32. ПРИНЦИП АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ
- 33. СИГНАЛЫ ГОСУДАРСТВЕННОЙ СИСТЕМЫ ПРИБОРОВ (ГСП)
- 34. ОСНОВНЫЕ ПРЕОБРАЗОВАНИЯ ПРИ ТЕХНИЧЕСКИХ ИЗМЕРЕНИЯХ ПРОМЕЖУТОЧНЫЕ СИГНАЛЫ
- 35. ЭЛЕМЕНТАРНЫЕ ПРЕОБРАЗОВАТЕЛИ СИГНАЛОВ
- 36. ЭЛЕМЕНТАРНЫЕ ПРЕОБРАЗОВАТЕЛИ СИГНАЛОВ
- 37. ЭЛЕМЕНТАРНЫЕ ПРЕОБРАЗОВАТЕЛИ СИГНАЛОВ Разделить на два слайда, добавив Магнитоэлектрический пр-тель
- 38. ИЗМЕРЕНИЕ ТЕМПЕРАТУРЫ Жидкостные термометры расширения ТЕМПЕРАТУРА ХАРАКТЕРИЗУЕТ СТЕПЕНЬ НАГРЕТОСТИ ТЕЛА Коэффициент линейного расширения Чувствительность 0,4…5 (до
- 39. ИЗМЕРЕНИЕ ТЕМПЕРАТУРЫ Манометрические термометры -60 д - до 550°С Диапазон измерения температуры от 1 – термобаллон
- 40. ТЕРМОЭЛЕКТРИЧЕСКИЙ ЭФФЕКТ Ε = ΔU(1 – 2) = f (t - t ) 0 1 2
- 41. МАТЕРИАЛЫ ДЛЯ ТЕРМОЭЛЕКТРИЧЕСКИХ ТЕРМОМЕТРОВ (ТЕРМОПАР) ТХК (хромель-копель) – (-50 … +60 °С); ТХА (хромель-алюмель) – (-50
- 42. РУЧНОЙ ПОТЕНЦИОМЕТР R – сопротивление для настройки R – калиброванное сопротивление R – сопротивление реохорда U
- 43. ТЕРМОПРЕОБРАЗОВАТЕЛИ СОПРОТИВЛЕНИЯ Т ↑ ⇒ R↑ Т ↑ ⇒ R↓
- 44. ТЕРМОПРЕОБРАЗОВАТЕЛИ СОПРОТИВЛЕНИЯ
- 45. УРАВНОВЕШЕННАЯ МОСТОВАЯ ИЗМЕРИТЕЛЬНАЯ СХЕМА
- 46. ПИРОМЕТРЫ -50 до 3000°С ДИАПАЗОН ИЗМЕРЕНИЯ МОБИЛЬНЫЙ ПИРОМЕТР С ЦИФРОВОЙ ИНДИКАЦИЕЙ РЕЗУЛЬТАТА ИЗМЕРЕНИЯ
- 47. ИЗМЕРЕНИЕ ДАВЛЕНИЯ ВИДЫ ДАВЛЕНИЯ
- 48. ПРЕОБРАЗОВАТЕЛИ ДАВЛЕНИЯ ЖИДКОСТНЫЕ (ОСНОВАННЫЕ НА УРАВНОВЕШИВАНИИ ДАВЛЕНИЯ СТОЛБОМ ЖИДКОСТИ); ДЕФОРМАЦИОННЫЕ (ДАВЛЕНИЕ ИЗМЕРЯЕТСЯ ПО ВЕЛИЧИНЕ ДЕФОРМАЦИИ УПРУГОГО
- 49. По диапазону измерения МАНОМЕТРЫ ДИФФМАНОМЕТРЫ ВАКУУМЕТРЫ МАНОВАКУУМЕТРЫ НАПОРОМЕРЫ ТЯГОМЕРЫ ТЯГОНАПОРОМЕРЫ
- 50. ЖИДКОСТНЫЕ МАНОМЕТРЫ S/s > 400 U-ОБРАЗНЫЙ МАНОМЕТР ЧАШЕЧНЫЙ МАНОМЕТР
- 51. ПРЕОБРАЗОВАТЕЛИ НА УПРУГИХ ЭЛЕМЕНТАХ ГОФРИРОВАННАЯ МЕМБРАНА СИЛЬФОН ТЕНЗОРЕЗИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ «КРЕМНИЙ НА САПФИРЕ» МЕМБРАННАЯ КОРОБКА P F
- 52. ИНТЕЛЛЕКТНЫЕ ДАТЧИКИ ДАВЛЕНИЯ МАНОМЕТР ДИФФЕРЕНЦИАЛЬНЫЙ МАНОМЕТР
- 53. ЗАЩИТА ОТ АГРЕССИВНЫХ СРЕД РАЗДЕЛИТЕЛЬНЫЙ СОСУД МЕМБРАННЫЙ РАЗДЕЛИТЕЛЬ ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ МЕМБРАНА РАЗДЕЛИТЕЛЬНАЯ (НЕЙТРАЛЬНАЯ) ЖИДКОСТЬ
- 54. ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ УРОВНЯ
- 55. ПРЕОБРАЗОВАТЕЛИ УРОВНЯ ПОПЛАВКОВЫЙ БУЙКОВЫЙ
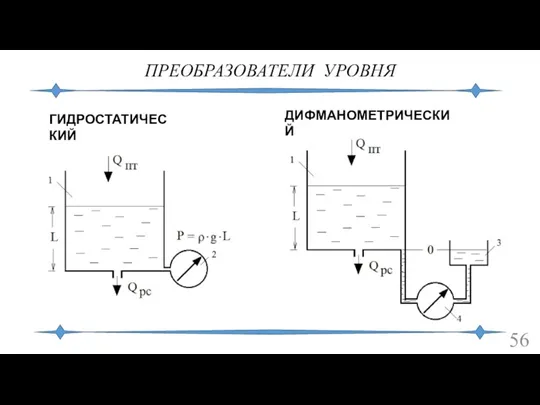
- 56. ПРЕОБРАЗОВАТЕЛИ УРОВНЯ ГИДРОСТАТИЧЕСКИЙ ДИФМАНОМЕТРИЧЕСКИЙ
- 57. ПРЕОБРАЗОВАТЕЛИ УРОВНЯ ПЬЕЗОМЕТРИЧЕСКИЙ ЕМКОСТНОЙ РАДАРНЫЙ
- 58. ИЗМЕРЕНИЕ РАСХОДА И КОЛИЧЕСТВА ВЕЩЕСТВ РАСХОД – КОЛИЧЕСТВО ЖИДКОСТИ, ПАРА, СЫПУЧЕГО МАТЕРИАЛА ИЛИ ГАЗА, ПРОХОДЯЩЕЕ ЧЕРЕЗ
- 59. РАСХОДОМЕРЫ ДИНАМИЧЕСКОГО ДАВЛЕНИЯ
- 60. РАСХОДОМЕР ПЕРЕМЕННОГО ПЕРЕПАДА ДАВЛЕНИЯ С ДИАФРАГМОЙ
- 61. РАСХОДОМЕР ПОСТОЯННОГО ПЕРЕПАДА ДАВЛЕНИЯ РОТАМЕТР С ЭЛЕКТРИЧЕСКИМ ВЫХОДНЫМ СИГНАЛОМ С ПНЕВМАТИЧЕСКИМ ВЫХОДНЫМ СИГНАЛОМ
- 62. БЕСКОНТАКТНЫЕ РАСХОДОМЕРЫ ИНДУКЦИОННЫЙ УЛЬТРАЗВУКОВОЙ
- 63. ТЕПЛОВОЙ РАСХОДОМЕР ЖИДКОСТЕЙ И ГАЗОВ
- 64. ВИХРЕВОЙ РАСХОДОМЕР Q = k ⋅ f
- 65. КОРИОЛИСОВЫЙ РАСХОДОМЕР F = k ⋅ΔΦ
- 66. ВОЗМОЖНОСТИ «ИНТЕЛЛЕКТУАЛЬНЫХ» ДАТЧИКОВ ЦИФРОВАЯ ИНДИКАЦИЯ ТЕКУЩЕГО ЗНАЧЕНИЯ ИЗМЕРЯЕМОГО ПАРАМЕТРА ЦИФРОВАЯ ИНДИКАЦИЯ ПАРАМЕТРОВ НАСТРОЙКИ УНИФИЦИРОВАННЫЕ ВЫХОДНЫЕ АНАЛОГОВЫЕ
- 67. ИЗМЕРЕНИЕ РАСХОДА СЫПУЧИХ МАТЕРИАЛОВ ПРИ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ДИНАМИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ РАСХОДА
- 68. ЛЕНТОЧНЫЕ ПРЕОБРАЗОВАТЕЛИ РАСХОДА СМ F = k ⋅ S
- 69. ИМПЕЛЛЕРНЫЙ РАСХОДОМЕР СЫПУЧИХ МАТЕРИАЛОВ (Impeller – крыльчатка)
- 70. ИЗМЕРЕНИЕ КАЧЕСТВЕННЫХ ХАРАКТЕРИСТИК ВЕЩЕСТВ БУЙКОВЫЙ ПЛОТНОМЕР ГИДРОСТАТИЧЕСКИЙ ПЛОТНОМЕР ИЗМЕРЕНИЕ ПЛОТНОСТИ ЖИДКОСТЕЙ
- 71. ИЗМЕРЕНИЕ ПЛОТНОСТИ ЖИДКОСТЕЙ ВЕСОВОЙ ПЛОТНОМЕР ЖИДКОСТИ ΔP = ρ ⋅ g ⋅ (Η1 − Η2) а)
- 72. ИЗМЕРЕНИЕ ВЯЗКОСТИ ЖИДКОСТЕЙ РОТАЦИОННЫЙ ВИСКОЗИМЕТР ВИБРАЦИОННЫЙ ВИСКОЗИМЕТР
- 73. ИЗМЕРЕНИЕ ВЛАЖНОСТИ ВЛАЖНОСТЬ ГАЗОВ СОДЕРЖАНИЕ В НИХ ВОДЯНОГО ПАРА ОТНОСИТЕЛЬНАЯ ВЛАЖНОСТЬ ГАЗА : отношение массовой доли
- 74. ИЗМЕРЕНИЕ ВЛАЖНОСТИ ГАЗОВ ПСИХРОМЕТРИЧЕСКИЙ МЕТОД МЕТОД ТОЧКИ РОСЫ
- 75. ИЗМЕРЕНИЕ ВЛАЖНОСТИ ЖИДКОСТЕЙ И СЫПУЧИХ ВЕЩЕСТВ ИНФРАКРАСНЫЙ МЕТОД
- 76. Промежуточные преобразователи СНАЧАЛА ДОБАВИТЬ МАГНИТОЭЛЕКТРИЧЕСКИЙ ПОТОМ «ток-давление» и «сила (перемещение) – ток»
- 77. УПРАВЛЕНИЕ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ ЦЕЛЬ УПРАВЛЕНИЯ: ДОСТИЖЕНИЕ ЗАДАННОГО ЗНАЧЕНИЯ КРИТЕРИЯ ЭФФЕКТИВНОСТИ (ОПТИМАЛЬНОСТИ) ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА ПРИ СОБЛЮДЕНИИ ТРЕБОВАНИЙ
- 78. ЗАДАЧИ, РЕШАЕМЫЕ ПРИ РАЗРАБОТКЕ АСУ ТП ВЫБОР: РЕГУЛИРУЕМЫХ ПЕРЕМЕННЫХ КАНАЛОВ ПОДАЧИ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ КОНТРОЛИРУЕМЫХ ПЕРЕМЕННЫХ ПЕРЕМЕННЫХ,
- 79. ТИПОВАЯ СТРУКТУРА ЛОКАЛЬНОЙ АСР Х вых – регулируемый параметр Х зд – заданное значение регулируемого параметра
- 80. ОЦЕНКА ЭФФЕКТИВНОСТИ РАБОТЫ АСР ПЕРЕХОДНЫЙ ПРОЦЕСС – ИЗМЕНЕНИЕ ВЫХОДНОЙ ПЕРЕМЕННОЙ ЗАМКНУТОЙ АВТОМАТИЧЕСКОЙ СИСТЕМЫ ПОСЛЕ ПОДАЧИ НА
- 81. ТИПОВЫЕ ВХОДНЫЕ ВОЗДЕЙСТВИЯ ЕДИНИЧНЫЙ СКАЧОК ЕДИНИЧНЫЙ ИМПУЛЬС ГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ МГНОВЕННЫЙ ИМПУЛЬС ФИЗИЧЕСКАЯ ПЕРЕМЕННАЯ В ОТНОСИТЕЛЬНЫХ ЕДИНИЦАХ:
- 82. ВИДЫ ПЕРЕХОДНЫХ ПРОЦЕССОВ ВХОДНОЕ ВОЗДЕЙСТВИЕ ПО КАНАЛУ ЗАДАНИЯ ВХОДНОЕ ВОЗДЕЙСТВИЕ ПО КАНАЛУ ВОЗМУЩЕНИЯ КОЛЕБАТЕЛЬНЫЙ АПЕРИОДИЧЕСКИЙ КОЛЕБАТЕЛЬНЫЙ
- 83. ОСНОВНЫЕ ПАРАМЕРЫ ПЕРЕХОДНЫХ ПРОЦЕССОВ
- 84. ПОКАЗАТЕЛИ КАЧЕСТВА РЕГУЛИРОВАНИЯ КОСВЕННЫЕ ПОКАЗАТЕЛИ ИНТЕГРАЛЬНЫЙ КРИТЕРИЙ (ТОЛЬКО ДЛЯ АПЕРИОДИЧЕСКИХ ПРОЦЕССОВ) ИНТЕГРАЛЬНЫЙ КВАДРАТИЧНЫЙ КРИТЕРИЙ ПРЯМЫЕ ПОКАЗАТЕЛИ
- 85. АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ РЕГУЛЯТОР – АВТОМАТИЧЕСКОЕ УСТРОЙСТВО, ПРЕДНАЗНАЧЕННОЕ ДЛЯ СТАБИЛИЗАЦИИ ДИНАМИЧЕСКИХ ПАРАМЕТРОВ НА ЗАДАННОМ ЗНАЧЕНИИ РЕГУЛЯТОР –
- 86. КЛАССИФИКАЦИЯ РЕГУЛЯТОРОВ
- 87. ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ ПОЗИЦИОННЫЙ (ПЗ) РЕГУЛЯТОР ЗАКОН РЕГУЛИРОВАНИЯ СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА
- 88. ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ ПЕРЕХОДНЫЕ ПРОЦЕССЫ В АСР ПРИ ПОЗИЦИОННОМ РЕГУЛИРОВАНИИ
- 89. ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ ПРОПОРЦИОНАЛЬНЫЙ (П) РЕГУЛЯТОР ЗАКОН РЕГУЛИРОВАНИЯ ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ПЕРЕХОДНЫЙ ПРОЦЕСС В АСР ПРИ ПРОПОРЦИОНАЛЬНОМ
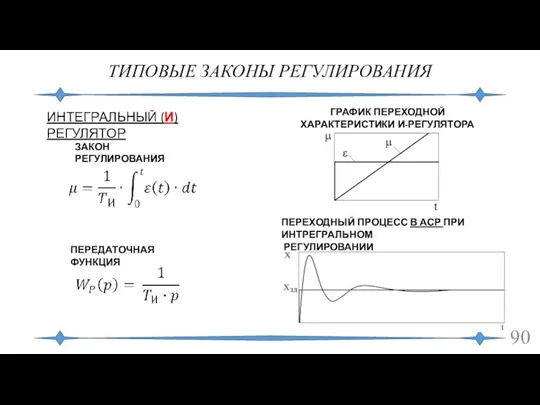
- 90. ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ ЗАКОН РЕГУЛИРОВАНИЯ ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ПЕРЕХОДНЫЙ ПРОЦЕСС В АСР ПРИ ИНТРЕГРАЛЬНОМ РЕГУЛИРОВАНИИ ИНТЕГРАЛЬНЫЙ (И)
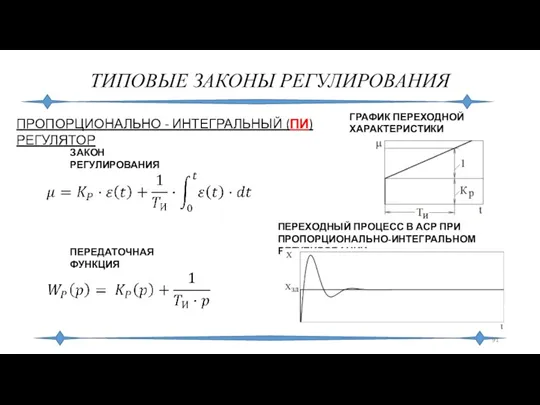
- 91. ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ ПРОПОРЦИОНАЛЬНО - ИНТЕГРАЛЬНЫЙ (ПИ) РЕГУЛЯТОР ЗАКОН РЕГУЛИРОВАНИЯ ПЕРЕХОДНЫЙ ПРОЦЕСС В АСР ПРИ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОМ
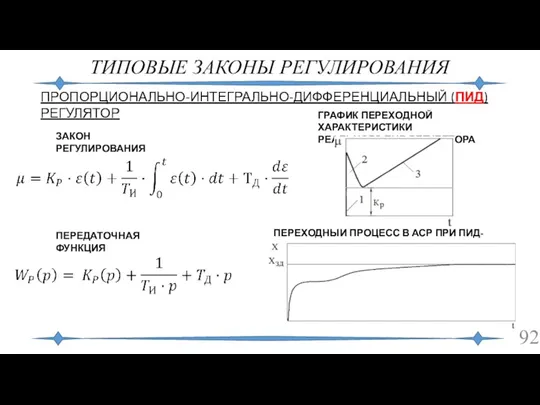
- 92. ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ (ПИД) РЕГУЛЯТОР ЗАКОН РЕГУЛИРОВАНИЯ ПЕРЕХОДНЫЙ ПРОЦЕСС В АСР ПРИ ПИД-РЕГУЛИРОВАНИИ ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
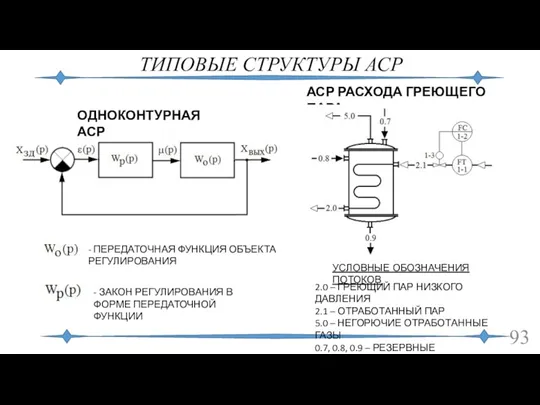
- 93. ТИПОВЫЕ СТРУКТУРЫ АСР ОДНОКОНТУРНАЯ АСР - ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ОБЪЕКТА РЕГУЛИРОВАНИЯ - ЗАКОН РЕГУЛИРОВАНИЯ В ФОРМЕ ПЕРЕДАТОЧНОЙ
- 94. КОМБИНИРОВАННАЯ АСР УСЛОВИЕ ФИЗИЧЕСКОЙ РЕАЛИЗУЕМОСТИ КОРРЕКТОРА КОМБИНИРОВАННАЯ АСР РАСХОДА КОМПОНЕНТА 0.8
- 95. КАСКАДНАЯ АСР КАСКАДНАЯ АСР ТЕМПЕРАТУРЫ УСЛОВИЯ РЕАЛИЗУЕМОСТИ
- 96. АСР МНОГОСВЯЗНЫХ ОБЪЕКТОВ К - КОЭФФИЦИЕНТЫ ПЕРЕДАЧИ i,j
- 97. ВЫБОР И РАСЧЁТ (СИНТЕЗ) АВТОМАТИЧЕСКИХ СИСТЕМ РЕГУЛИРОВАНИЯ 2 ФОРМУЛИРОВКА КРИТЕРИЯ ОПТИМАЛЬНОСТИ 1 ИСХОДНЫЕ ДАННЫЕ: МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
- 98. МЕТОДИКИ СИНТЕЗА ТИПОВЫХ РЕГУЛЯТОРОВ ВЫБОР ЗАКОНА РЕГУЛИРОВАНИЯ ДЛЯ ЛИНЕЙНЫХ ОБЪЕКТОВ ФОРМАЛИЗОВАННЫЙ ПРИБЛИЖЁННЫЙ МЕТОД ЭВРИСТИЧЕСКИЙ МЕТОД ПОЗИЦИОННЫЙ
- 99. ПРИБЛИЖЁННЫЕ МЕТОДЫ СИНТЕЗА РЕГУЛЯТОРОВ ВЫБОР ЗАКОНА РЕГУЛИРОВАНИЯ ВЫБОР НАСТРОЕК РЕГУЛЯТОРОВ ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ОБЪЕКТА РЕГУЛИРОВАНИЯ НОМОГРАММА ДЛЯ
- 100. ФИЗИЧЕСКАЯ РЕАЛИЗАЦИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ БЕЗ ИСПОЛНИТЕЛЬНОЙ ЧАСТИ УПРАВЛЕНИЕ НЕВОЗМОЖНО
- 101. БАЗОВЫЕ ОПРЕДЕЛЕНИЯ ЗАДАЧА ИСПОЛНИТЕЛЬНОЙ ЧАСТИ АСР – ПРЕОБРАЗОВАНИЕ УПРАВЛЯЮЩЕГО СИГНАЛА В УПРАВЛЯЮЩЕЕ ВОЗДЕЙСТВИЕ УПРАВЛЯЮЩЕЕ ВОЗДЕЙСТВИЕ –
- 102. МЕТОДЫ И СРЕДСТВА ИЗМЕНЕНИЯ РАСХОДА ЖИДКОСТЕЙ И ГАЗОВ В АСР ОБЪЁМНЫЙ МЕТОД ДРОССЕЛЬНЫЙ МЕТОД ТЕХНИЧЕСКИЕ СРЕДСТВА
- 103. ДРОССЕЛЬНОЕ РЕГУЛИРОВАНИЕ РАСХОДА ЖИДКОСТЕЙ И ГАЗОВ РЕГУЛИРУЮЩИЕ ОРГАНЫ ДРОССЕЛЬНЫХ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ ПРИНЦИП ДЕЙСТВИЯ
- 104. ДРОССЕЛЬНЫЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА РЕГУЛИРУЮЩИЙ КЛАПАН С МЕМБРАННЫМ ПНЕВМАТИЧЕСКИМ ПРИВОДОМ
- 105. ДРОССЕЛЬНЫЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА РЕГУЛИРУЮЩИЙ КЛАПАН С ЭЛЕКТРОПРИВОДОМ РЕГУЛИРУЮЩИЙ КЛАПАН С МЕМБРАННЫМ ПНЕВМОПРИВОДОМ ПОВОРОТНАЯ ЗАСЛОНКА С МЕМБРАННЫМ
- 106. ИНТЕГРАЦИЯ ДРОССЕЛЬНЫХ ИУ В КОНТУР АСР ИУ С ЭЛЕКТРОДВИГАТЕЛЬНЫМ ИМ ИУ С МЕМБРАННЫМ ПНЕВМАТИЧЕСКИМ ИМ Q
- 107. ОБЪЁМНОЕ РЕГУЛИРОВАНИЕ РАСХОДА ЖИДКОСТЕЙ И ГАЗОВ Q = f(P)
- 108. УПРАВЛЕНИЕ РАСХОДОМ СЫПУЧИХ МАТЕРИАЛОВ МЕХАНИЧЕСКИЕ ПИТАТЕЛИ ДЛЯ СЫПУЧИХ МАТЕРИАЛОВ
- 109. УПРАВЛЕНИЕ РАСХОДОМ СЫПУЧИХ МАТЕРИАЛОВ ВИБРАЦИОННЫЙ ПИТАТЕЛЬ ВЕРТИКАЛЬНЫЙ ПНЕВМАТИЧЕСКИЙ ПИТАТЕЛЬ Q = f (A, w) Q =
- 110. ПОНЯТИЕ О ДОЗИРОВАНИИ ВЕЩЕСТВ ДОЗИРОВАНИЕ – ОТМЕРИВАНИЕ И ВЫДАЧА ЗАДАННОГО КОЛИЧЕСТВА ВЕЩЕСТВА В ВИДЕ ПОРЦИЙ (ДОЗ)
- 111. ПОРШНЕВОЙ НАСОС-ДОЗАТОР
- 112. МЕМБРАННЫЙ НАСОС-ДОЗАТОР
- 113. ЛЕНТОЧНЫЙ ДОЗАТОР СЫПУЧИХ ВЕЩЕСТВ F = W S .
- 114. ЛЕНТОЧНЫЙ ДОЗАТОР СЫПУЧИХ ВЕЩЕСТВ «ДОЗА» 1 – ЛЕНТОЧНЫЙ ПИТАТЕЛЬ 2 – ШКАФ УПРАВЛЕНИЯ 3 – ПУЛЬТ
- 115. ЛЕНТОЧНЫЙ АВТОМАТИЧЕСКИЙ ДОЗАТОР 5 4 3 2 1
- 116. АТК – МНОГОПАРАМЕТРИЧЕСКАЯ СИСТЕМА ЭЛЕМЕНТЫ АТК ПРОЕКТИРОВАНИЕ АТК ТРЕБУЕТ ОПРЕДЕЛЕНИЯ МЕЖДИСЦИПЛИНАРНЫХ СВЯЗЕЙ
- 117. ВОПРОСЫ К ЗАЧЁТУ И ЭКЗАМЕНУ Автоматизация технологических процессов: основные понятия и определения. Иерархическая структура систем автоматизации
- 118. ВОПРОСЫ 2 11. Характеристики процесса измерения и средств измерений. 12. Виды технических измерений 13. Автоматическое измерение.
- 119. ВОПРОСЫ 3 22. Термоэлектрический эффект. Термоэлектрические термометры 23. Потенциометрический метод измерения 24. Термопреобразователи сопротивления. 25. Мостовая
- 120. ВОПРОСЫ 4 35.Пьезометрический, радарный и ёмкостной уровнемеры. 36.Измерение расхода и количества вещества. Классификация расходомеров. 37. Расходомеры
- 121. ВОПРОСЫ 5 46. Измерение вязкости жидкостей. Вибрационный и ротационный вискозиметры. 47. Влажность веществ и методы её
- 122. ВОПРОСЫ 6 57. Принцип инвариантности. Комбинированная АСР. 58. Каскадные АСР. 59. АСР многосвязных объектов. 60. Методики
- 124. Скачать презентацию
СОСТАВ КУРСА
ЛЕКЦИИ – 36 ЧАСОВ
ЛАБОРАТОРНЫЕ ЗАНЯТИЯ – 18 часов
КУРСОВОЕ ПРОЕКТИРОВАНИЕ
САМОСТОЯТЕЛЬНАЯ РАБОТА
СОСТАВ КУРСА
ЛЕКЦИИ – 36 ЧАСОВ
ЛАБОРАТОРНЫЕ ЗАНЯТИЯ – 18 часов
КУРСОВОЕ ПРОЕКТИРОВАНИЕ
САМОСТОЯТЕЛЬНАЯ РАБОТА
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА
БЕСПАЛОВ, А.В. СИСТЕМЫ УПРАВЛЕНИЯ ХИМИКО-ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ: УЧЕБНИК ДЛЯ ВУЗОВ/ А.В.
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА
БЕСПАЛОВ, А.В. СИСТЕМЫ УПРАВЛЕНИЯ ХИМИКО-ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ: УЧЕБНИК ДЛЯ ВУЗОВ/ А.В.
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
АВТОМАТИЗАЦИЯ – ЗАМЕНА РЯДА ФУНКЦИЙ ЧЕЛОВЕКА ПО КОНТРОЛЮ
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
АВТОМАТИЗАЦИЯ – ЗАМЕНА РЯДА ФУНКЦИЙ ЧЕЛОВЕКА ПО КОНТРОЛЮ
О ТЕРМИНОЛОГИИ
СИСТЕМА – МНОЖЕСТВО СВЯЗАННЫХ МЕЖДУ СОБОЙ ЭЛЕМЕНТОВ,
ПРЕДНАЗНАЧЕННЫХ ДЛЯ ДОСТИЖЕНИЯ
О ТЕРМИНОЛОГИИ
СИСТЕМА – МНОЖЕСТВО СВЯЗАННЫХ МЕЖДУ СОБОЙ ЭЛЕМЕНТОВ,
ПРЕДНАЗНАЧЕННЫХ ДЛЯ ДОСТИЖЕНИЯ
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
АВТОМАТИЗИРОВАННАЯ СИСТЕМА: В ВЫПОЛНЕНИИ ФУНКЦИЙ АВТОМАТЧЕСКОГО КОНТРОЛЯ И
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
АВТОМАТИЗИРОВАННАЯ СИСТЕМА: В ВЫПОЛНЕНИИ ФУНКЦИЙ АВТОМАТЧЕСКОГО КОНТРОЛЯ И
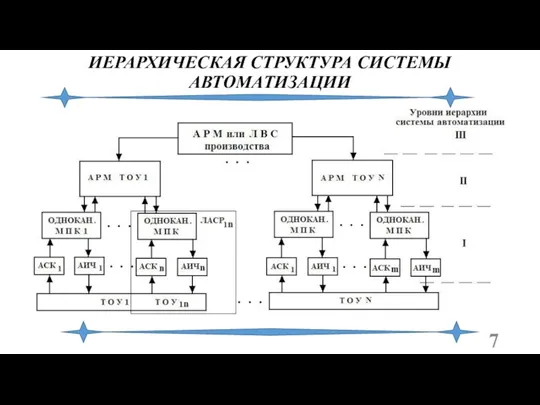
ИЕРАРХИЧЕСКАЯ СТРУКТУРА СИСТЕМЫ АВТОМАТИЗАЦИИ
ИЕРАРХИЧЕСКАЯ СТРУКТУРА СИСТЕМЫ АВТОМАТИЗАЦИИ
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
АРМ – АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА ТП
ЛАСР (АСР)
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
АРМ – АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА ТП
ЛАСР (АСР)
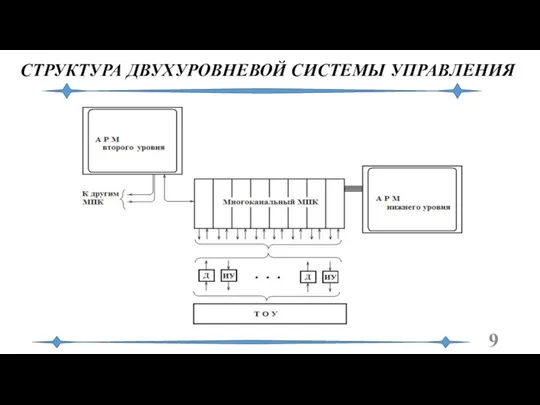
СТРУКТУРА ДВУХУРОВНЕВОЙ СИСТЕМЫ УПРАВЛЕНИЯ
СТРУКТУРА ДВУХУРОВНЕВОЙ СИСТЕМЫ УПРАВЛЕНИЯ
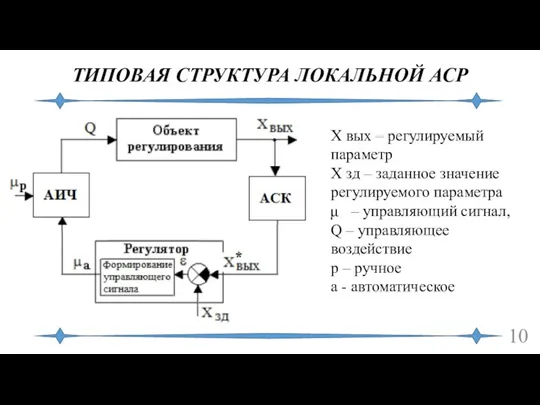
ТИПОВАЯ СТРУКТУРА ЛОКАЛЬНОЙ АСР
Х вых – регулируемый параметр
Х зд – заданное
ТИПОВАЯ СТРУКТУРА ЛОКАЛЬНОЙ АСР
Х вых – регулируемый параметр
Х зд – заданное
КЛАССИФИКАЦИЯ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
начать 21.09.15
КЛАССИФИКАЦИЯ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
начать 21.09.15
ОБЪЕКТЫ АВТОМАТИЗАЦИИ
ХАРАКТЕРИСТИКИ КАНАЛОВ
ПЕРЕДАЧИ
СТАТИЧЕСКИЕ
ДИНАМИЧЕСКИЕ
ВОЗМУЩЕНИЯ
КОНТРОЛИРУЕМЫЕ НЕКОНТРОЛИРУЕМЫЕ
ВХОДНЫЕ ПРЕМЕННЫЕ
УПРАВЛЯЮЩИЕ ВОЗДЕЙСТВИЯ НЕЗАВИСИМЫЕ
ПЕРЕМЕННЫЕ
ВЫХОДНЫЕ ПЕРЕМЕННЫЕ
КОНТРОЛИРУЕМЫЕ РЕГУЛИРУЕМЫЕ НЕЗАВИСИМЫЕ
ПЕРЕМЕННЫЕ
МНОГОМЕРНЫЙ
ОБЪЕКТЫ АВТОМАТИЗАЦИИ
ХАРАКТЕРИСТИКИ КАНАЛОВ
ПЕРЕДАЧИ
СТАТИЧЕСКИЕ
ДИНАМИЧЕСКИЕ
ВОЗМУЩЕНИЯ
КОНТРОЛИРУЕМЫЕ НЕКОНТРОЛИРУЕМЫЕ
ВХОДНЫЕ ПРЕМЕННЫЕ
УПРАВЛЯЮЩИЕ ВОЗДЕЙСТВИЯ НЕЗАВИСИМЫЕ
ПЕРЕМЕННЫЕ
ВЫХОДНЫЕ ПЕРЕМЕННЫЕ
КОНТРОЛИРУЕМЫЕ РЕГУЛИРУЕМЫЕ НЕЗАВИСИМЫЕ
ПЕРЕМЕННЫЕ
МНОГОМЕРНЫЙ
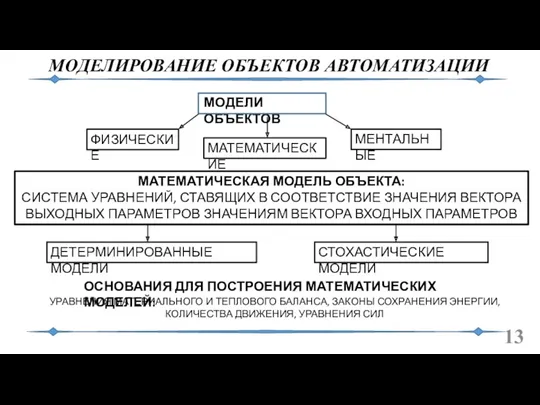
МОДЕЛИРОВАНИЕ ОБЪЕКТОВ АВТОМАТИЗАЦИИ
МОДЕЛИ ОБЪЕКТОВ
ФИЗИЧЕСКИЕ
МАТЕМАТИЧЕСКИЕ
МЕНТАЛЬНЫЕ
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА:
СИСТЕМА УРАВНЕНИЙ, СТАВЯЩИХ В СООТВЕТСТВИЕ ЗНАЧЕНИЯ
МОДЕЛИРОВАНИЕ ОБЪЕКТОВ АВТОМАТИЗАЦИИ
МОДЕЛИ ОБЪЕКТОВ
ФИЗИЧЕСКИЕ
МАТЕМАТИЧЕСКИЕ
МЕНТАЛЬНЫЕ
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА:
СИСТЕМА УРАВНЕНИЙ, СТАВЯЩИХ В СООТВЕТСТВИЕ ЗНАЧЕНИЯ
СВОЙСТВА ОБЪЕКТОВ АВТОМАТИЗАЦИИ
ЕМКОСТЬ – СПОСОБНОСТЬ ОБЪЕКТА АККУМУЛИРОВАТЬ ВЕЩЕСТВО ИЛИ ЭНЕРГИЮ
НАГРУЗКА –
СВОЙСТВА ОБЪЕКТОВ АВТОМАТИЗАЦИИ
ЕМКОСТЬ – СПОСОБНОСТЬ ОБЪЕКТА АККУМУЛИРОВАТЬ ВЕЩЕСТВО ИЛИ ЭНЕРГИЮ
НАГРУЗКА –
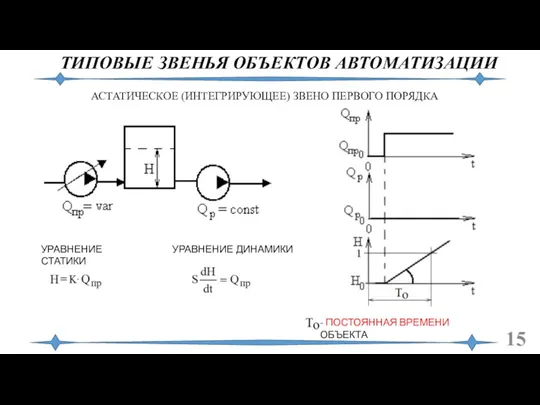
ТИПОВЫЕ ЗВЕНЬЯ ОБЪЕКТОВ АВТОМАТИЗАЦИИ
АСТАТИЧЕСКОЕ (ИНТЕГРИРУЮЩЕЕ) ЗВЕНО ПЕРВОГО ПОРЯДКА
УРАВНЕНИЕ ДИНАМИКИ
УРАВНЕНИЕ СТАТИКИ
-
ТИПОВЫЕ ЗВЕНЬЯ ОБЪЕКТОВ АВТОМАТИЗАЦИИ
АСТАТИЧЕСКОЕ (ИНТЕГРИРУЮЩЕЕ) ЗВЕНО ПЕРВОГО ПОРЯДКА
УРАВНЕНИЕ ДИНАМИКИ
УРАВНЕНИЕ СТАТИКИ
-
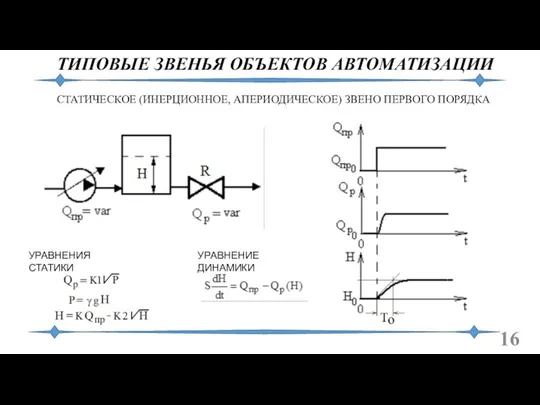
ТИПОВЫЕ ЗВЕНЬЯ ОБЪЕКТОВ АВТОМАТИЗАЦИИ
СТАТИЧЕСКОЕ (ИНЕРЦИОННОЕ, АПЕРИОДИЧЕСКОЕ) ЗВЕНО ПЕРВОГО ПОРЯДКА
УРАВНЕНИЯ СТАТИКИ
УРАВНЕНИЕ
ТИПОВЫЕ ЗВЕНЬЯ ОБЪЕКТОВ АВТОМАТИЗАЦИИ
СТАТИЧЕСКОЕ (ИНЕРЦИОННОЕ, АПЕРИОДИЧЕСКОЕ) ЗВЕНО ПЕРВОГО ПОРЯДКА
УРАВНЕНИЯ СТАТИКИ
УРАВНЕНИЕ
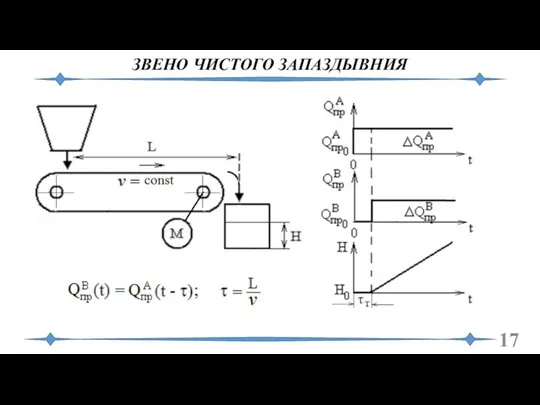
ЗВЕНО ЧИСТОГО ЗАПАЗДЫВНИЯ
ЗВЕНО ЧИСТОГО ЗАПАЗДЫВНИЯ
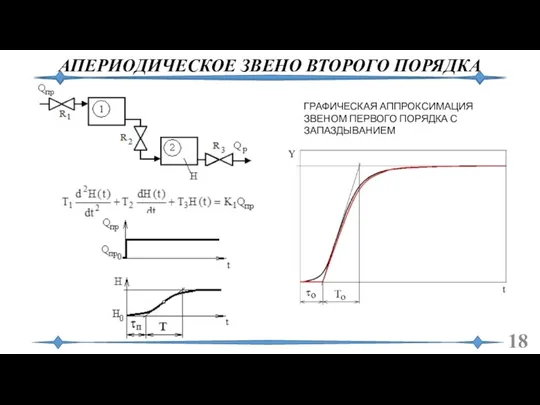
АПЕРИОДИЧЕСКОЕ ЗВЕНО ВТОРОГО ПОРЯДКА
ГРАФИЧЕСКАЯ АППРОКСИМАЦИЯ ЗВЕНОМ ПЕРВОГО ПОРЯДКА С ЗАПАЗДЫВАНИЕМ
АПЕРИОДИЧЕСКОЕ ЗВЕНО ВТОРОГО ПОРЯДКА
ГРАФИЧЕСКАЯ АППРОКСИМАЦИЯ ЗВЕНОМ ПЕРВОГО ПОРЯДКА С ЗАПАЗДЫВАНИЕМ
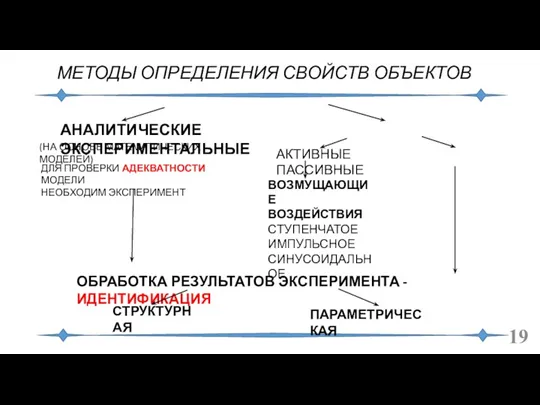
МЕТОДЫ ОПРЕДЕЛЕНИЯ СВОЙСТВ ОБЪЕКТОВ
АНАЛИТИЧЕСКИЕ ЭКСПЕРИМЕНТАЛЬНЫЕ
ВОЗМУЩАЮЩИЕ
ВОЗДЕЙСТВИЯ
СТУПЕНЧАТОЕ
ИМПУЛЬСНОЕ
СИНУСОИДАЛЬНОЕ
(НА ОСНОВЕ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ)
ДЛЯ ПРОВЕРКИ АДЕКВАТНОСТИ
МЕТОДЫ ОПРЕДЕЛЕНИЯ СВОЙСТВ ОБЪЕКТОВ
АНАЛИТИЧЕСКИЕ ЭКСПЕРИМЕНТАЛЬНЫЕ
ВОЗМУЩАЮЩИЕ
ВОЗДЕЙСТВИЯ
СТУПЕНЧАТОЕ
ИМПУЛЬСНОЕ
СИНУСОИДАЛЬНОЕ
(НА ОСНОВЕ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ)
ДЛЯ ПРОВЕРКИ АДЕКВАТНОСТИ
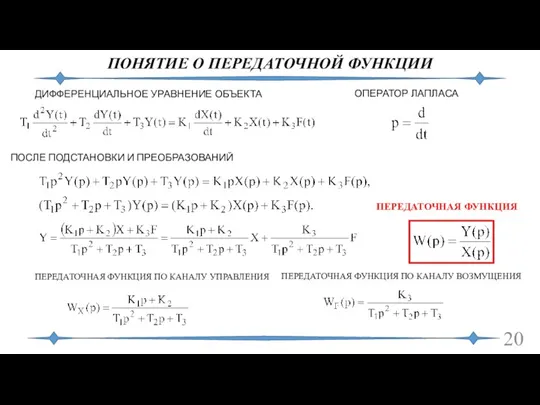
ПОНЯТИЕ О ПЕРЕДАТОЧНОЙ ФУНКЦИИ
ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ ОБЪЕКТА
ОПЕРАТОР ЛАПЛАСА
ПОСЛЕ ПОДСТАНОВКИ И ПРЕОБРАЗОВАНИЙ
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
ПОНЯТИЕ О ПЕРЕДАТОЧНОЙ ФУНКЦИИ
ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ ОБЪЕКТА
ОПЕРАТОР ЛАПЛАСА
ПОСЛЕ ПОДСТАНОВКИ И ПРЕОБРАЗОВАНИЙ
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
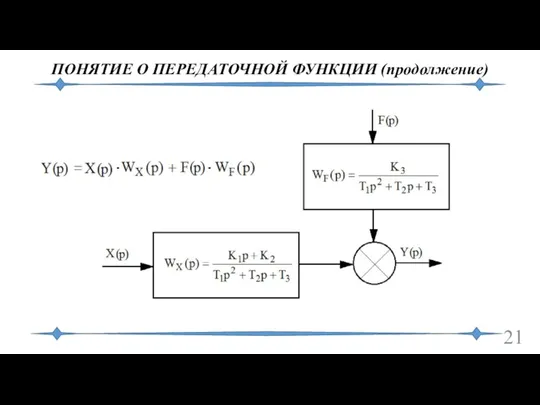
ПОНЯТИЕ О ПЕРЕДАТОЧНОЙ ФУНКЦИИ (продолжение)
ПОНЯТИЕ О ПЕРЕДАТОЧНОЙ ФУНКЦИИ (продолжение)
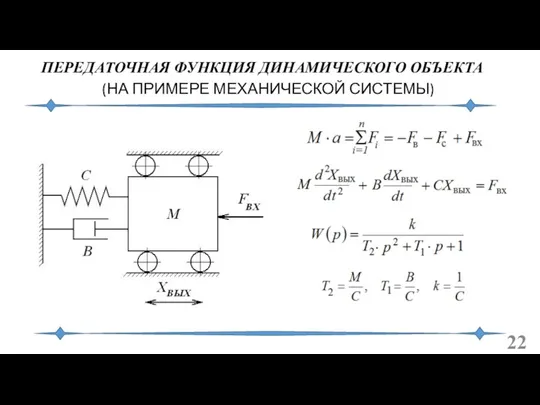
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ДИНАМИЧЕСКОГО ОБЪЕКТА
(НА ПРИМЕРЕ МЕХАНИЧЕСКОЙ СИСТЕМЫ)
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ДИНАМИЧЕСКОГО ОБЪЕКТА
(НА ПРИМЕРЕ МЕХАНИЧЕСКОЙ СИСТЕМЫ)
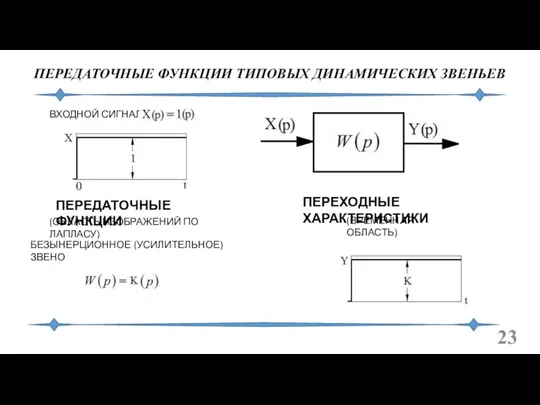
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ
ПЕРЕХОДНЫЕ ХАРАКТЕРИСТИКИ
ВХОДНОЙ СИГНАЛ
БЕЗЫНЕРЦИОННОЕ (УСИЛИТЕЛЬНОЕ) ЗВЕНО
(ВРЕМЕННАЯ ОБЛАСТЬ)
(ОБЛАСТЬ
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ
ПЕРЕХОДНЫЕ ХАРАКТЕРИСТИКИ
ВХОДНОЙ СИГНАЛ
БЕЗЫНЕРЦИОННОЕ (УСИЛИТЕЛЬНОЕ) ЗВЕНО
(ВРЕМЕННАЯ ОБЛАСТЬ)
(ОБЛАСТЬ
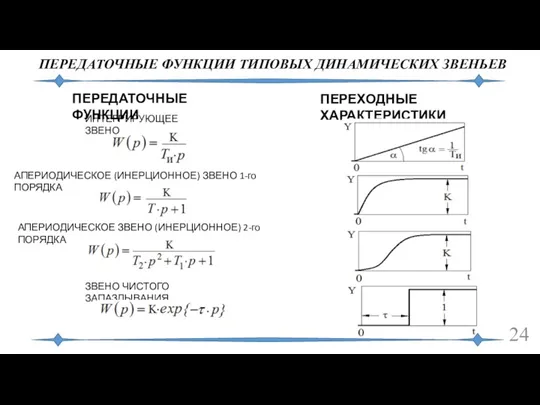
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ
ПЕРЕХОДНЫЕ ХАРАКТЕРИСТИКИ
ИНТЕГРИРУЮЩЕЕ ЗВЕНО
АПЕРИОДИЧЕСКОЕ (ИНЕРЦИОННОЕ) ЗВЕНО 1-го
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ
ПЕРЕХОДНЫЕ ХАРАКТЕРИСТИКИ
ИНТЕГРИРУЮЩЕЕ ЗВЕНО
АПЕРИОДИЧЕСКОЕ (ИНЕРЦИОННОЕ) ЗВЕНО 1-го
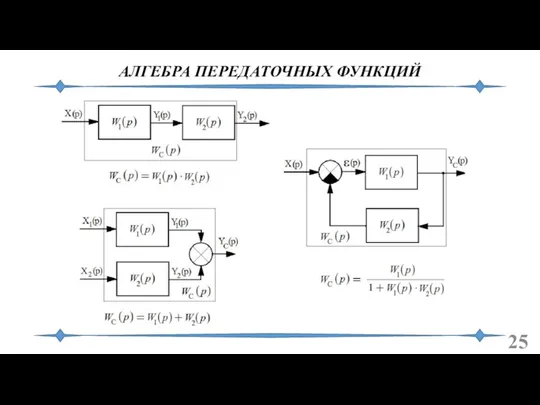
АЛГЕБРА ПЕРЕДАТОЧНЫХ ФУНКЦИЙ
АЛГЕБРА ПЕРЕДАТОЧНЫХ ФУНКЦИЙ
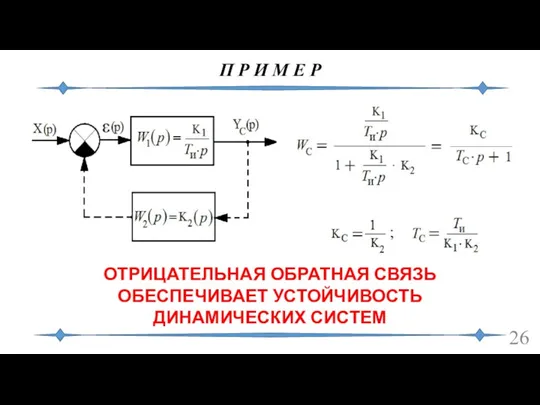
П Р И М Е Р
ОТРИЦАТЕЛЬНАЯ ОБРАТНАЯ СВЯЗЬ ОБЕСПЕЧИВАЕТ УСТОЙЧИВОСТЬ ДИНАМИЧЕСКИХ
П Р И М Е Р
ОТРИЦАТЕЛЬНАЯ ОБРАТНАЯ СВЯЗЬ ОБЕСПЕЧИВАЕТ УСТОЙЧИВОСТЬ ДИНАМИЧЕСКИХ
ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ ИЗМЕРЕНИЙ
ФИЗИЧЕСКАЯ ВЕЛИЧИНА – СВОЙСТВО ПРЕДМЕТОВ ИЛИ ЯВЛЕНИЙ, ОДИНАКОВОЕ
ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ ИЗМЕРЕНИЙ
ФИЗИЧЕСКАЯ ВЕЛИЧИНА – СВОЙСТВО ПРЕДМЕТОВ ИЛИ ЯВЛЕНИЙ, ОДИНАКОВОЕ
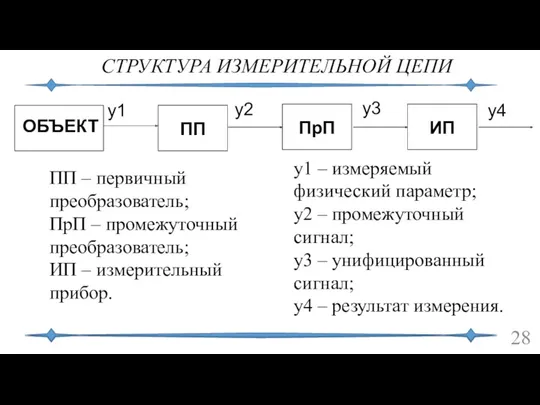
СТРУКТУРА ИЗМЕРИТЕЛЬНОЙ ЦЕПИ
ПП – первичный преобразователь;
ПрП – промежуточный преобразователь;
ИП – измерительный
СТРУКТУРА ИЗМЕРИТЕЛЬНОЙ ЦЕПИ
ПП – первичный преобразователь;
ПрП – промежуточный преобразователь;
ИП – измерительный
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ПРОЦЕССА И СРЕДСТВ ИЗМЕРЕНИЙ
ПОГРЕШНОСТЬ ИЗМЕРЕНИЯ – разность между результатом
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ПРОЦЕССА И СРЕДСТВ ИЗМЕРЕНИЙ
ПОГРЕШНОСТЬ ИЗМЕРЕНИЯ – разность между результатом
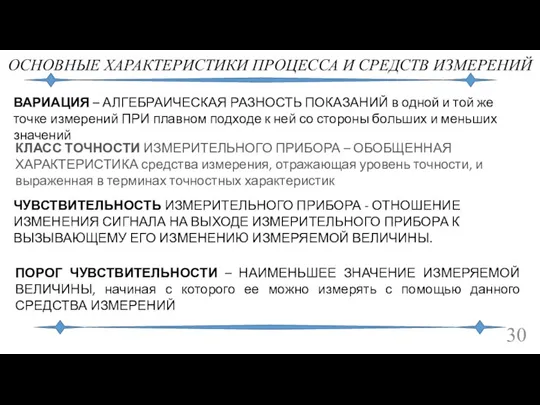
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ПРОЦЕССА И СРЕДСТВ ИЗМЕРЕНИЙ
ЧУВСТВИТЕЛЬНОСТЬ ИЗМЕРИТЕЛЬНОГО ПРИБОРА - ОТНОШЕНИЕ ИЗМЕНЕНИЯ СИГНАЛА
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ПРОЦЕССА И СРЕДСТВ ИЗМЕРЕНИЙ
ЧУВСТВИТЕЛЬНОСТЬ ИЗМЕРИТЕЛЬНОГО ПРИБОРА - ОТНОШЕНИЕ ИЗМЕНЕНИЯ СИГНАЛА
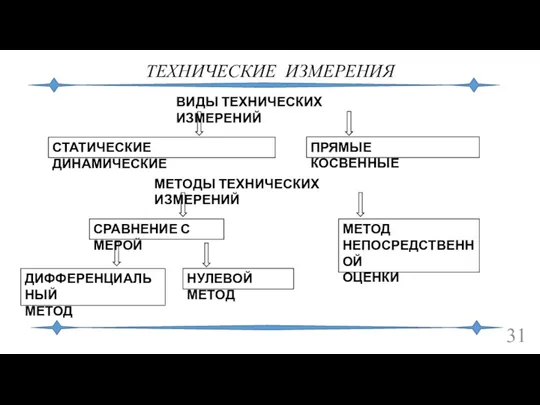
ТЕХНИЧЕСКИЕ ИЗМЕРЕНИЯ
СТАТИЧЕСКИЕ ДИНАМИЧЕСКИЕ
ПРЯМЫЕ КОСВЕННЫЕ
МЕТОДЫ ТЕХНИЧЕСКИХ ИЗМЕРЕНИЙ
ВИДЫ ТЕХНИЧЕСКИХ ИЗМЕРЕНИЙ
СРАВНЕНИЕ С МЕРОЙ
МЕТОД
НЕПОСРЕДСТВЕННОЙ
ТЕХНИЧЕСКИЕ ИЗМЕРЕНИЯ
СТАТИЧЕСКИЕ ДИНАМИЧЕСКИЕ
ПРЯМЫЕ КОСВЕННЫЕ
МЕТОДЫ ТЕХНИЧЕСКИХ ИЗМЕРЕНИЙ
ВИДЫ ТЕХНИЧЕСКИХ ИЗМЕРЕНИЙ
СРАВНЕНИЕ С МЕРОЙ
МЕТОД
НЕПОСРЕДСТВЕННОЙ
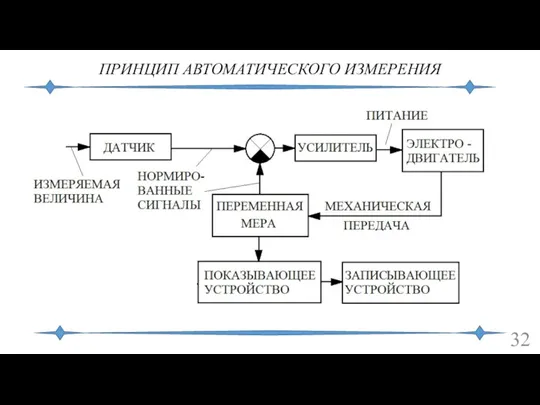
ПРИНЦИП АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ
ПРИНЦИП АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ
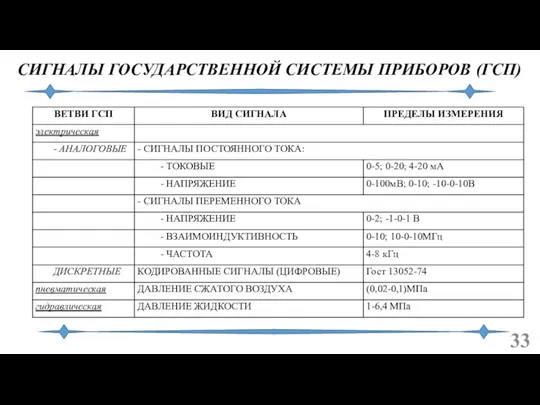
СИГНАЛЫ ГОСУДАРСТВЕННОЙ СИСТЕМЫ ПРИБОРОВ (ГСП)
СИГНАЛЫ ГОСУДАРСТВЕННОЙ СИСТЕМЫ ПРИБОРОВ (ГСП)
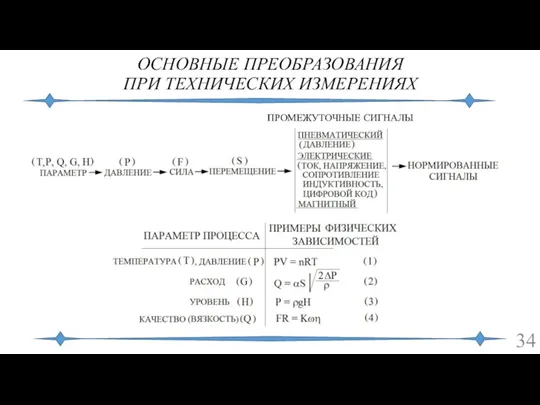
ОСНОВНЫЕ ПРЕОБРАЗОВАНИЯ
ПРИ ТЕХНИЧЕСКИХ ИЗМЕРЕНИЯХ
ПРОМЕЖУТОЧНЫЕ СИГНАЛЫ
ОСНОВНЫЕ ПРЕОБРАЗОВАНИЯ
ПРИ ТЕХНИЧЕСКИХ ИЗМЕРЕНИЯХ
ПРОМЕЖУТОЧНЫЕ СИГНАЛЫ
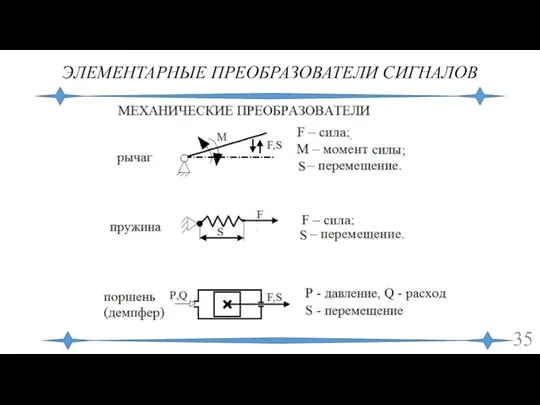
ЭЛЕМЕНТАРНЫЕ ПРЕОБРАЗОВАТЕЛИ СИГНАЛОВ
ЭЛЕМЕНТАРНЫЕ ПРЕОБРАЗОВАТЕЛИ СИГНАЛОВ
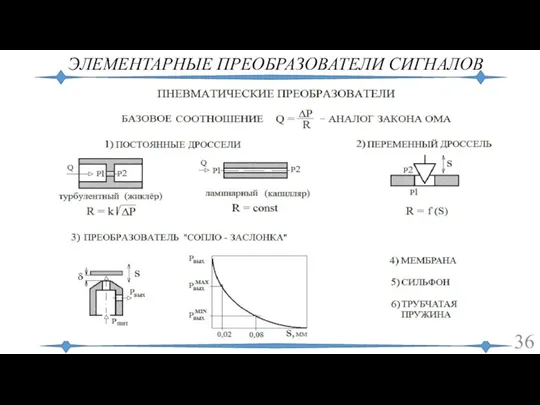
ЭЛЕМЕНТАРНЫЕ ПРЕОБРАЗОВАТЕЛИ СИГНАЛОВ
ЭЛЕМЕНТАРНЫЕ ПРЕОБРАЗОВАТЕЛИ СИГНАЛОВ
ЭЛЕМЕНТАРНЫЕ ПРЕОБРАЗОВАТЕЛИ СИГНАЛОВ
Разделить на два слайда, добавив
Магнитоэлектрический пр-тель
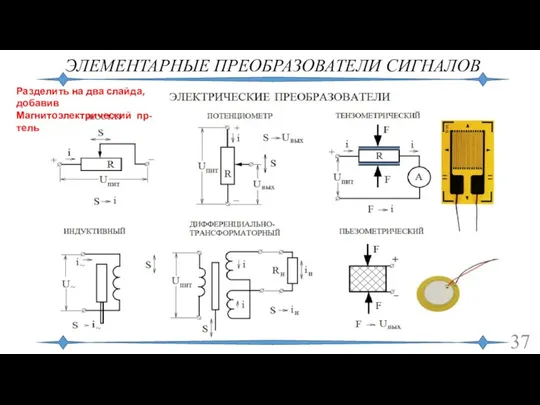
ЭЛЕМЕНТАРНЫЕ ПРЕОБРАЗОВАТЕЛИ СИГНАЛОВ
Разделить на два слайда, добавив
Магнитоэлектрический пр-тель
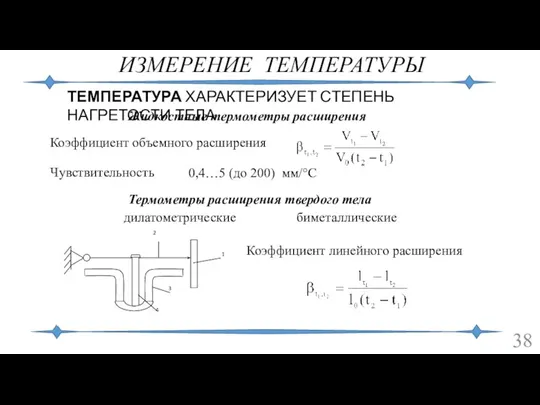
ИЗМЕРЕНИЕ ТЕМПЕРАТУРЫ
Жидкостные термометры расширения
ТЕМПЕРАТУРА ХАРАКТЕРИЗУЕТ СТЕПЕНЬ НАГРЕТОСТИ ТЕЛА
Коэффициент линейного расширения
Чувствительность
ИЗМЕРЕНИЕ ТЕМПЕРАТУРЫ
Жидкостные термометры расширения
ТЕМПЕРАТУРА ХАРАКТЕРИЗУЕТ СТЕПЕНЬ НАГРЕТОСТИ ТЕЛА
Коэффициент линейного расширения
Чувствительность
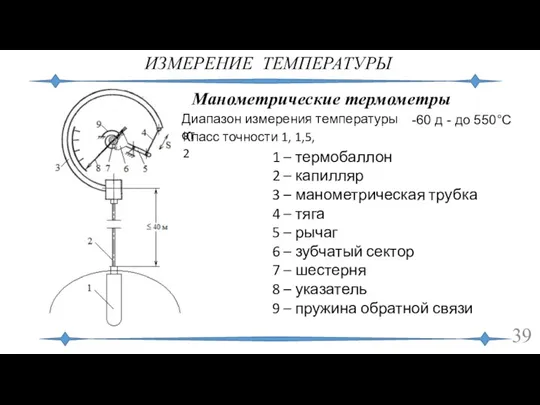
ИЗМЕРЕНИЕ ТЕМПЕРАТУРЫ
Манометрические термометры
-60 д - до 550°С
Диапазон измерения температуры от
1
ИЗМЕРЕНИЕ ТЕМПЕРАТУРЫ
Манометрические термометры
-60 д - до 550°С
Диапазон измерения температуры от
1
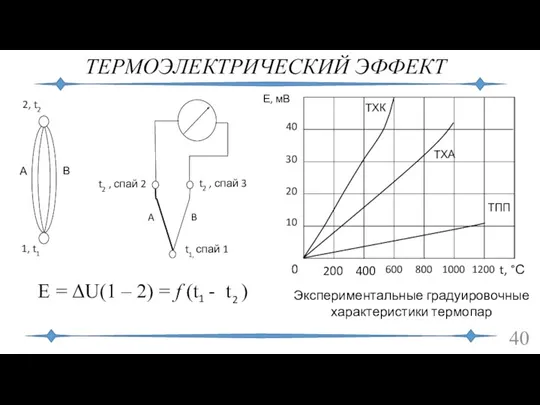
ТЕРМОЭЛЕКТРИЧЕСКИЙ ЭФФЕКТ
Ε = ΔU(1 – 2) = f (t - t
ТЕРМОЭЛЕКТРИЧЕСКИЙ ЭФФЕКТ
Ε = ΔU(1 – 2) = f (t - t
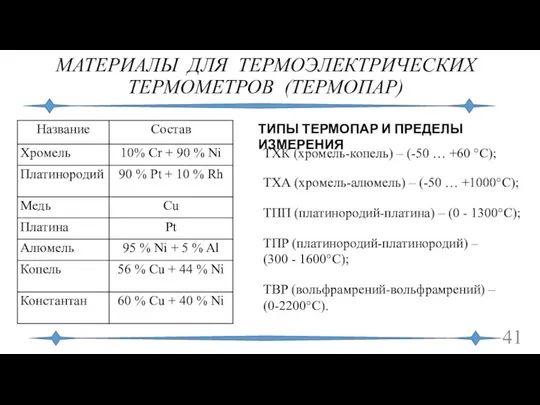
МАТЕРИАЛЫ ДЛЯ ТЕРМОЭЛЕКТРИЧЕСКИХ ТЕРМОМЕТРОВ (ТЕРМОПАР)
ТХК (хромель-копель) – (-50 … +60
МАТЕРИАЛЫ ДЛЯ ТЕРМОЭЛЕКТРИЧЕСКИХ ТЕРМОМЕТРОВ (ТЕРМОПАР)
ТХК (хромель-копель) – (-50 … +60
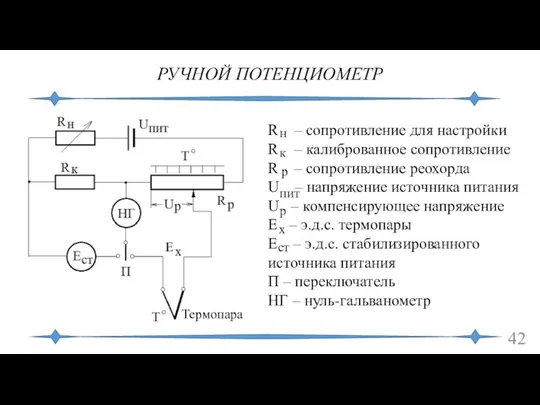
РУЧНОЙ ПОТЕНЦИОМЕТР
R – сопротивление для настройки
R – калиброванное сопротивление
R – сопротивление
РУЧНОЙ ПОТЕНЦИОМЕТР
R – сопротивление для настройки
R – калиброванное сопротивление
R – сопротивление
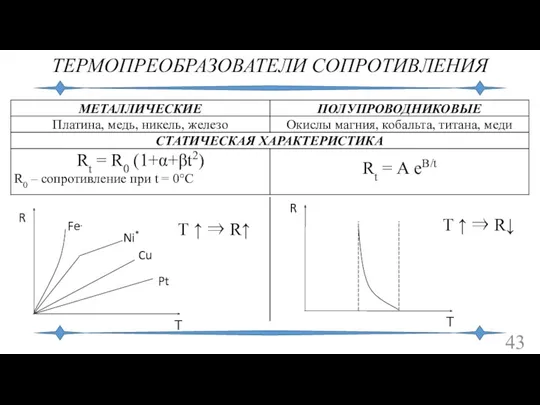
ТЕРМОПРЕОБРАЗОВАТЕЛИ СОПРОТИВЛЕНИЯ
Т ↑ ⇒ R↑
Т ↑ ⇒ R↓
ТЕРМОПРЕОБРАЗОВАТЕЛИ СОПРОТИВЛЕНИЯ
Т ↑ ⇒ R↑
Т ↑ ⇒ R↓
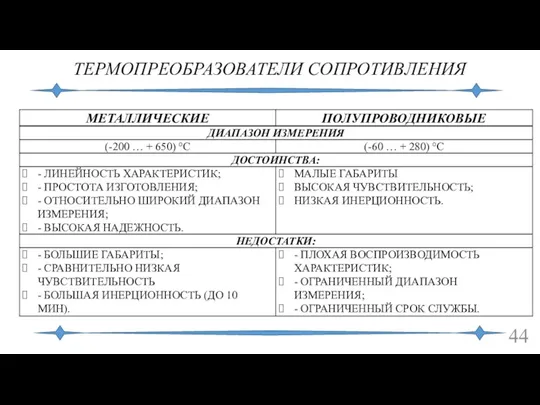
ТЕРМОПРЕОБРАЗОВАТЕЛИ СОПРОТИВЛЕНИЯ
ТЕРМОПРЕОБРАЗОВАТЕЛИ СОПРОТИВЛЕНИЯ
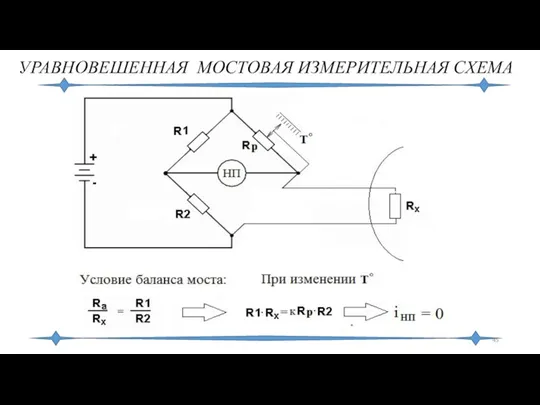
УРАВНОВЕШЕННАЯ МОСТОВАЯ ИЗМЕРИТЕЛЬНАЯ СХЕМА
УРАВНОВЕШЕННАЯ МОСТОВАЯ ИЗМЕРИТЕЛЬНАЯ СХЕМА

ПИРОМЕТРЫ
-50 до 3000°С
ДИАПАЗОН ИЗМЕРЕНИЯ
МОБИЛЬНЫЙ ПИРОМЕТР С ЦИФРОВОЙ ИНДИКАЦИЕЙ РЕЗУЛЬТАТА ИЗМЕРЕНИЯ
ПИРОМЕТРЫ
-50 до 3000°С
ДИАПАЗОН ИЗМЕРЕНИЯ
МОБИЛЬНЫЙ ПИРОМЕТР С ЦИФРОВОЙ ИНДИКАЦИЕЙ РЕЗУЛЬТАТА ИЗМЕРЕНИЯ
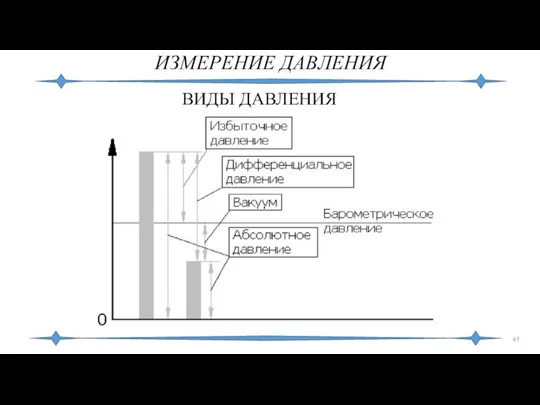
ИЗМЕРЕНИЕ ДАВЛЕНИЯ
ВИДЫ ДАВЛЕНИЯ
ИЗМЕРЕНИЕ ДАВЛЕНИЯ
ВИДЫ ДАВЛЕНИЯ
ПРЕОБРАЗОВАТЕЛИ ДАВЛЕНИЯ
ЖИДКОСТНЫЕ (ОСНОВАННЫЕ НА УРАВНОВЕШИВАНИИ ДАВЛЕНИЯ СТОЛБОМ ЖИДКОСТИ);
ДЕФОРМАЦИОННЫЕ (ДАВЛЕНИЕ ИЗМЕРЯЕТСЯ ПО
ПРЕОБРАЗОВАТЕЛИ ДАВЛЕНИЯ
ЖИДКОСТНЫЕ (ОСНОВАННЫЕ НА УРАВНОВЕШИВАНИИ ДАВЛЕНИЯ СТОЛБОМ ЖИДКОСТИ);
ДЕФОРМАЦИОННЫЕ (ДАВЛЕНИЕ ИЗМЕРЯЕТСЯ ПО
По диапазону измерения
МАНОМЕТРЫ
ДИФФМАНОМЕТРЫ
ВАКУУМЕТРЫ
МАНОВАКУУМЕТРЫ
НАПОРОМЕРЫ
ТЯГОМЕРЫ
ТЯГОНАПОРОМЕРЫ
По диапазону измерения
МАНОМЕТРЫ
ДИФФМАНОМЕТРЫ
ВАКУУМЕТРЫ
МАНОВАКУУМЕТРЫ
НАПОРОМЕРЫ
ТЯГОМЕРЫ
ТЯГОНАПОРОМЕРЫ
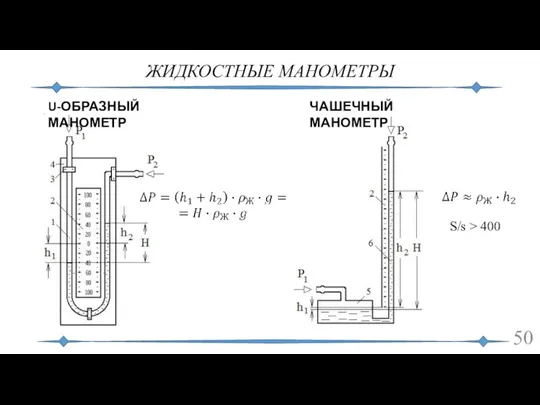
ЖИДКОСТНЫЕ МАНОМЕТРЫ
S/s > 400
U-ОБРАЗНЫЙ МАНОМЕТР
ЧАШЕЧНЫЙ МАНОМЕТР
ЖИДКОСТНЫЕ МАНОМЕТРЫ
S/s > 400
U-ОБРАЗНЫЙ МАНОМЕТР
ЧАШЕЧНЫЙ МАНОМЕТР
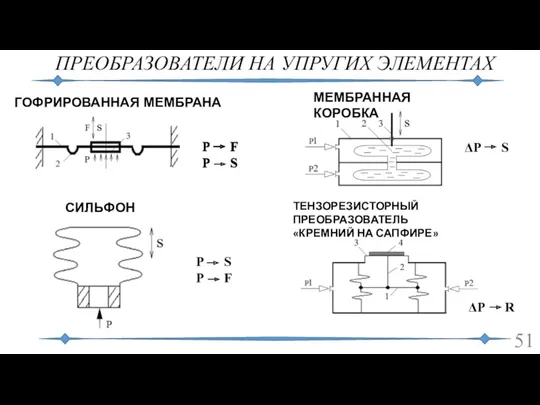
ПРЕОБРАЗОВАТЕЛИ НА УПРУГИХ ЭЛЕМЕНТАХ
ГОФРИРОВАННАЯ МЕМБРАНА
СИЛЬФОН
ТЕНЗОРЕЗИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ
«КРЕМНИЙ НА САПФИРЕ»
МЕМБРАННАЯ КОРОБКА
P
ПРЕОБРАЗОВАТЕЛИ НА УПРУГИХ ЭЛЕМЕНТАХ
ГОФРИРОВАННАЯ МЕМБРАНА
СИЛЬФОН
ТЕНЗОРЕЗИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ
«КРЕМНИЙ НА САПФИРЕ»
МЕМБРАННАЯ КОРОБКА
P

ИНТЕЛЛЕКТНЫЕ ДАТЧИКИ ДАВЛЕНИЯ
МАНОМЕТР
ДИФФЕРЕНЦИАЛЬНЫЙ
МАНОМЕТР
ИНТЕЛЛЕКТНЫЕ ДАТЧИКИ ДАВЛЕНИЯ
МАНОМЕТР
ДИФФЕРЕНЦИАЛЬНЫЙ
МАНОМЕТР
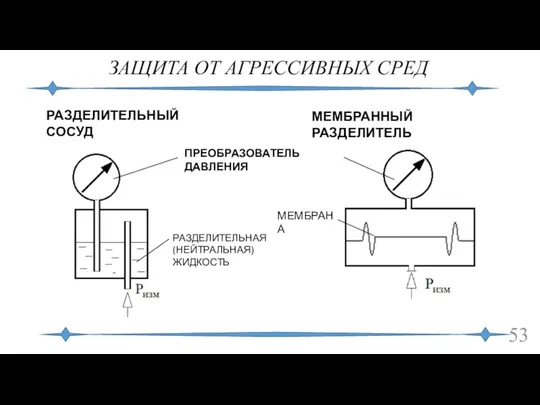
ЗАЩИТА ОТ АГРЕССИВНЫХ СРЕД
РАЗДЕЛИТЕЛЬНЫЙ СОСУД
МЕМБРАННЫЙ РАЗДЕЛИТЕЛЬ
ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ
МЕМБРАНА
РАЗДЕЛИТЕЛЬНАЯ
(НЕЙТРАЛЬНАЯ)
ЖИДКОСТЬ
ЗАЩИТА ОТ АГРЕССИВНЫХ СРЕД
РАЗДЕЛИТЕЛЬНЫЙ СОСУД
МЕМБРАННЫЙ РАЗДЕЛИТЕЛЬ
ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ
МЕМБРАНА
РАЗДЕЛИТЕЛЬНАЯ
(НЕЙТРАЛЬНАЯ)
ЖИДКОСТЬ
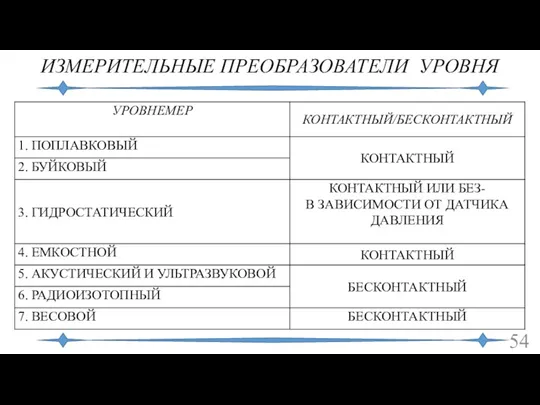
ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ УРОВНЯ
ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ УРОВНЯ
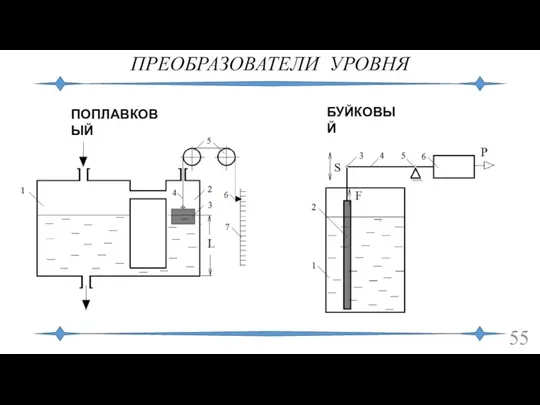
ПРЕОБРАЗОВАТЕЛИ УРОВНЯ
ПОПЛАВКОВЫЙ
БУЙКОВЫЙ
ПРЕОБРАЗОВАТЕЛИ УРОВНЯ
ПОПЛАВКОВЫЙ
БУЙКОВЫЙ
ПРЕОБРАЗОВАТЕЛИ УРОВНЯ
ГИДРОСТАТИЧЕСКИЙ
ДИФМАНОМЕТРИЧЕСКИЙ
ПРЕОБРАЗОВАТЕЛИ УРОВНЯ
ГИДРОСТАТИЧЕСКИЙ
ДИФМАНОМЕТРИЧЕСКИЙ
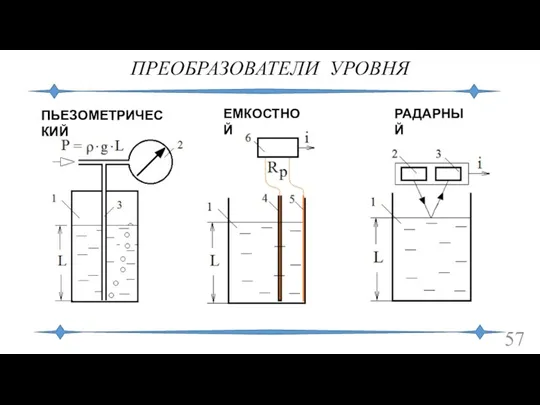
ПРЕОБРАЗОВАТЕЛИ УРОВНЯ
ПЬЕЗОМЕТРИЧЕСКИЙ
ЕМКОСТНОЙ
РАДАРНЫЙ
ПРЕОБРАЗОВАТЕЛИ УРОВНЯ
ПЬЕЗОМЕТРИЧЕСКИЙ
ЕМКОСТНОЙ
РАДАРНЫЙ
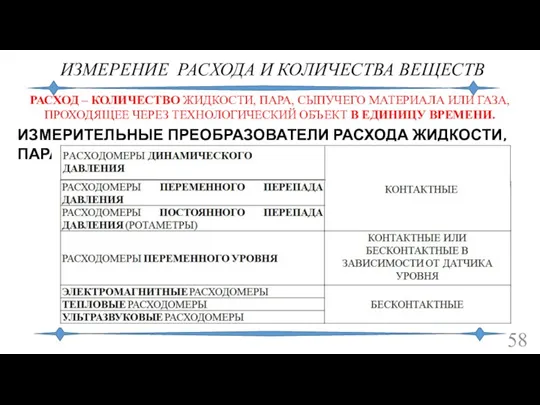
ИЗМЕРЕНИЕ РАСХОДА И КОЛИЧЕСТВА ВЕЩЕСТВ
РАСХОД – КОЛИЧЕСТВО ЖИДКОСТИ, ПАРА, СЫПУЧЕГО МАТЕРИАЛА
ИЗМЕРЕНИЕ РАСХОДА И КОЛИЧЕСТВА ВЕЩЕСТВ
РАСХОД – КОЛИЧЕСТВО ЖИДКОСТИ, ПАРА, СЫПУЧЕГО МАТЕРИАЛА
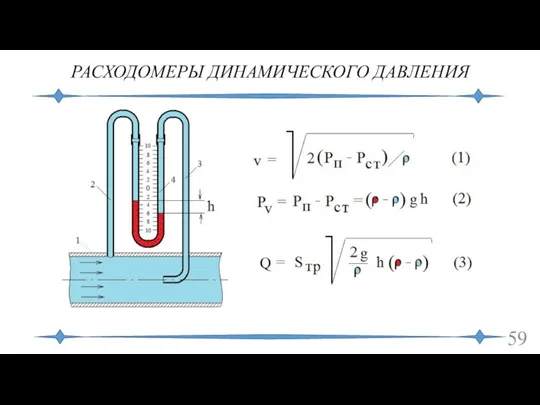
РАСХОДОМЕРЫ ДИНАМИЧЕСКОГО ДАВЛЕНИЯ
РАСХОДОМЕРЫ ДИНАМИЧЕСКОГО ДАВЛЕНИЯ
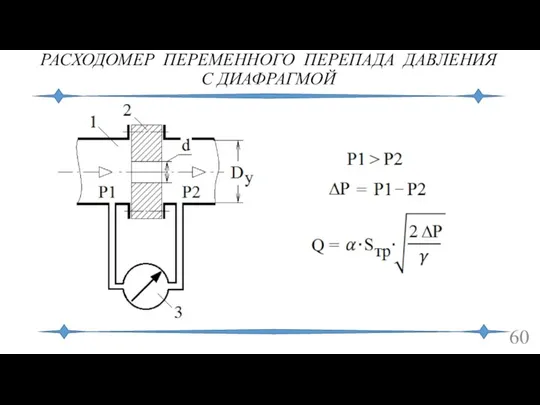
РАСХОДОМЕР ПЕРЕМЕННОГО ПЕРЕПАДА ДАВЛЕНИЯ
С ДИАФРАГМОЙ
РАСХОДОМЕР ПЕРЕМЕННОГО ПЕРЕПАДА ДАВЛЕНИЯ
С ДИАФРАГМОЙ
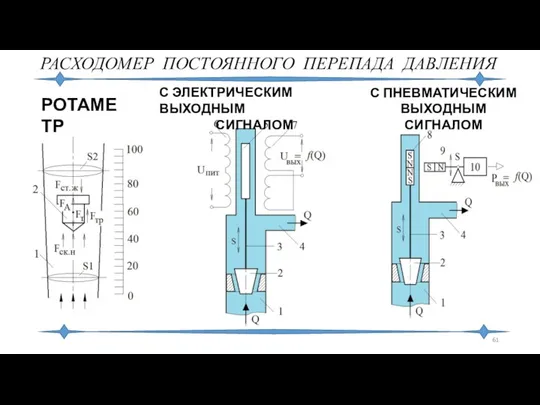
РАСХОДОМЕР ПОСТОЯННОГО ПЕРЕПАДА ДАВЛЕНИЯ
РОТАМЕТР
С ЭЛЕКТРИЧЕСКИМ ВЫХОДНЫМ
СИГНАЛОМ
С ПНЕВМАТИЧЕСКИМ
ВЫХОДНЫМ СИГНАЛОМ
РАСХОДОМЕР ПОСТОЯННОГО ПЕРЕПАДА ДАВЛЕНИЯ
РОТАМЕТР
С ЭЛЕКТРИЧЕСКИМ ВЫХОДНЫМ
СИГНАЛОМ
С ПНЕВМАТИЧЕСКИМ
ВЫХОДНЫМ СИГНАЛОМ
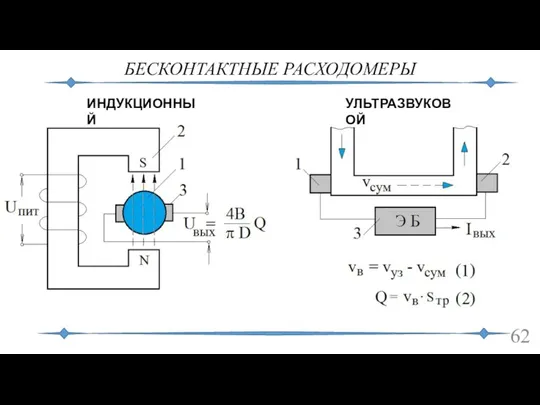
БЕСКОНТАКТНЫЕ РАСХОДОМЕРЫ
ИНДУКЦИОННЫЙ
УЛЬТРАЗВУКОВОЙ
БЕСКОНТАКТНЫЕ РАСХОДОМЕРЫ
ИНДУКЦИОННЫЙ
УЛЬТРАЗВУКОВОЙ
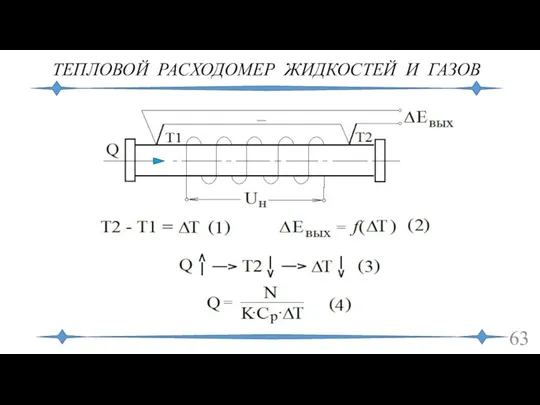
ТЕПЛОВОЙ РАСХОДОМЕР ЖИДКОСТЕЙ И ГАЗОВ
ТЕПЛОВОЙ РАСХОДОМЕР ЖИДКОСТЕЙ И ГАЗОВ
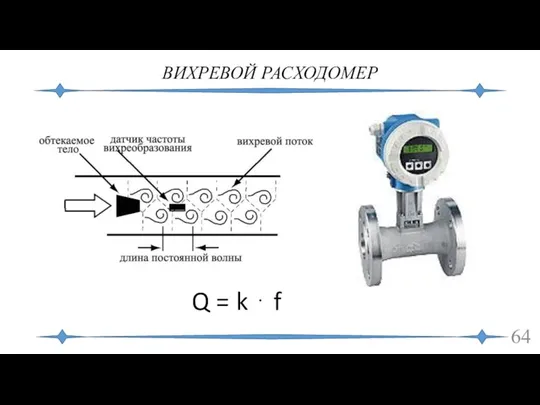
ВИХРЕВОЙ РАСХОДОМЕР
Q = k ⋅ f
ВИХРЕВОЙ РАСХОДОМЕР
Q = k ⋅ f
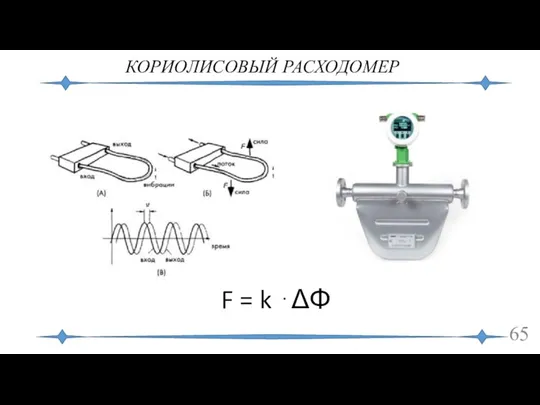
КОРИОЛИСОВЫЙ РАСХОДОМЕР
F = k ⋅ΔΦ
КОРИОЛИСОВЫЙ РАСХОДОМЕР
F = k ⋅ΔΦ
ВОЗМОЖНОСТИ «ИНТЕЛЛЕКТУАЛЬНЫХ» ДАТЧИКОВ
ЦИФРОВАЯ ИНДИКАЦИЯ ТЕКУЩЕГО ЗНАЧЕНИЯ ИЗМЕРЯЕМОГО ПАРАМЕТРА
ЦИФРОВАЯ ИНДИКАЦИЯ ПАРАМЕТРОВ НАСТРОЙКИ
УНИФИЦИРОВАННЫЕ
ВОЗМОЖНОСТИ «ИНТЕЛЛЕКТУАЛЬНЫХ» ДАТЧИКОВ
ЦИФРОВАЯ ИНДИКАЦИЯ ТЕКУЩЕГО ЗНАЧЕНИЯ ИЗМЕРЯЕМОГО ПАРАМЕТРА
ЦИФРОВАЯ ИНДИКАЦИЯ ПАРАМЕТРОВ НАСТРОЙКИ
УНИФИЦИРОВАННЫЕ

ИЗМЕРЕНИЕ РАСХОДА СЫПУЧИХ МАТЕРИАЛОВ
ПРИ КОМПЕНСАЦИИ ПОГРЕШНОСТИ
ДИНАМИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ РАСХОДА
ИЗМЕРЕНИЕ РАСХОДА СЫПУЧИХ МАТЕРИАЛОВ
ПРИ КОМПЕНСАЦИИ ПОГРЕШНОСТИ
ДИНАМИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ РАСХОДА
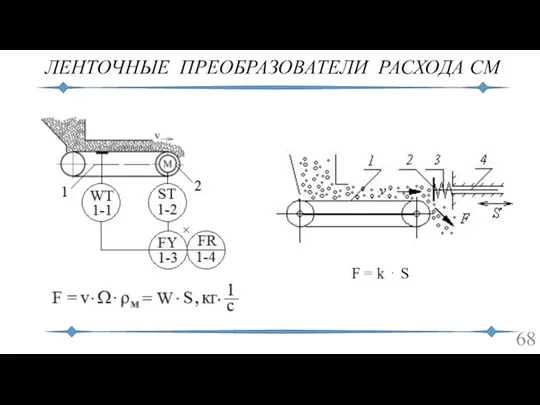
ЛЕНТОЧНЫЕ ПРЕОБРАЗОВАТЕЛИ РАСХОДА СМ
F = k ⋅ S
ЛЕНТОЧНЫЕ ПРЕОБРАЗОВАТЕЛИ РАСХОДА СМ
F = k ⋅ S
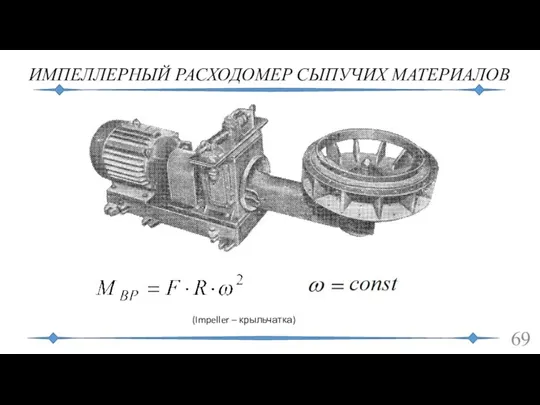
ИМПЕЛЛЕРНЫЙ РАСХОДОМЕР СЫПУЧИХ МАТЕРИАЛОВ
(Impeller – крыльчатка)
ИМПЕЛЛЕРНЫЙ РАСХОДОМЕР СЫПУЧИХ МАТЕРИАЛОВ
(Impeller – крыльчатка)
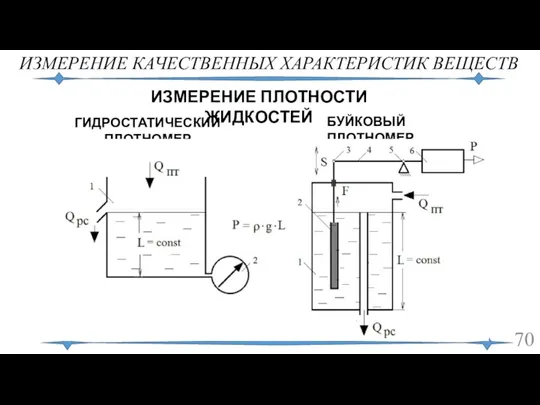
ИЗМЕРЕНИЕ КАЧЕСТВЕННЫХ ХАРАКТЕРИСТИК ВЕЩЕСТВ
БУЙКОВЫЙ ПЛОТНОМЕР
ГИДРОСТАТИЧЕСКИЙ ПЛОТНОМЕР
ИЗМЕРЕНИЕ ПЛОТНОСТИ ЖИДКОСТЕЙ
ИЗМЕРЕНИЕ КАЧЕСТВЕННЫХ ХАРАКТЕРИСТИК ВЕЩЕСТВ
БУЙКОВЫЙ ПЛОТНОМЕР
ГИДРОСТАТИЧЕСКИЙ ПЛОТНОМЕР
ИЗМЕРЕНИЕ ПЛОТНОСТИ ЖИДКОСТЕЙ
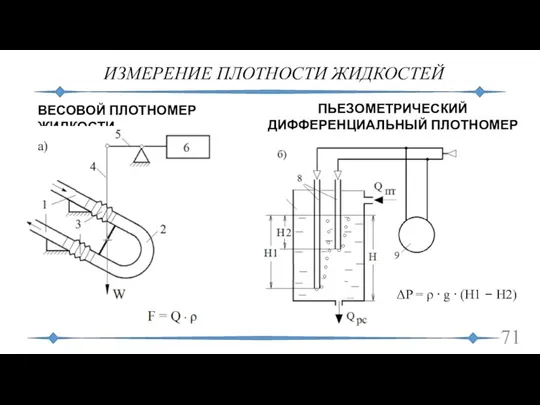
ИЗМЕРЕНИЕ ПЛОТНОСТИ ЖИДКОСТЕЙ
ВЕСОВОЙ ПЛОТНОМЕР ЖИДКОСТИ
ΔP = ρ ⋅ g ⋅ (Η1
ИЗМЕРЕНИЕ ПЛОТНОСТИ ЖИДКОСТЕЙ
ВЕСОВОЙ ПЛОТНОМЕР ЖИДКОСТИ
ΔP = ρ ⋅ g ⋅ (Η1
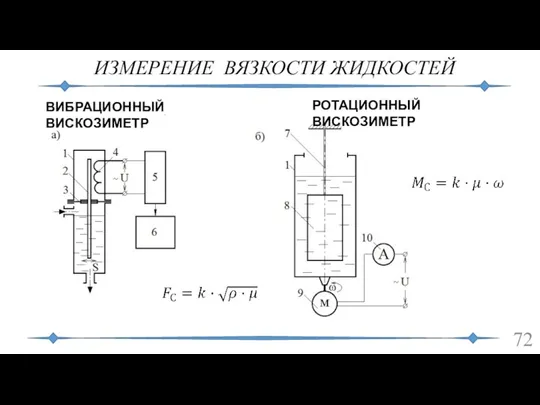
ИЗМЕРЕНИЕ ВЯЗКОСТИ ЖИДКОСТЕЙ
РОТАЦИОННЫЙ ВИСКОЗИМЕТР
ВИБРАЦИОННЫЙ ВИСКОЗИМЕТР
ИЗМЕРЕНИЕ ВЯЗКОСТИ ЖИДКОСТЕЙ
РОТАЦИОННЫЙ ВИСКОЗИМЕТР
ВИБРАЦИОННЫЙ ВИСКОЗИМЕТР
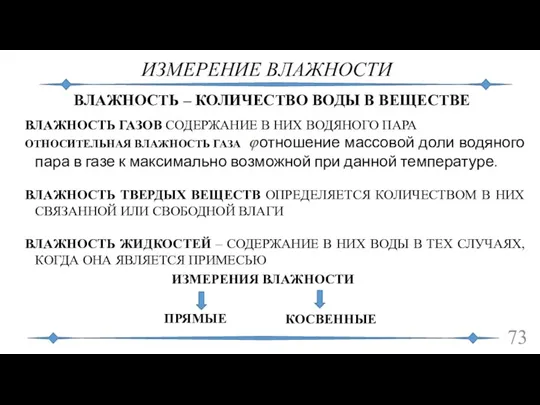
ИЗМЕРЕНИЕ ВЛАЖНОСТИ
ВЛАЖНОСТЬ ГАЗОВ СОДЕРЖАНИЕ В НИХ ВОДЯНОГО ПАРА
ОТНОСИТЕЛЬНАЯ ВЛАЖНОСТЬ ГАЗА
ИЗМЕРЕНИЕ ВЛАЖНОСТИ
ВЛАЖНОСТЬ ГАЗОВ СОДЕРЖАНИЕ В НИХ ВОДЯНОГО ПАРА
ОТНОСИТЕЛЬНАЯ ВЛАЖНОСТЬ ГАЗА
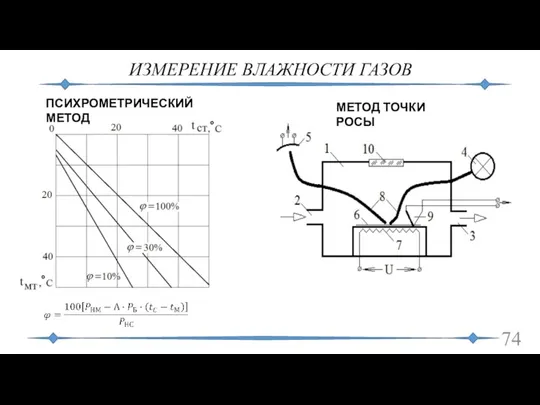
ИЗМЕРЕНИЕ ВЛАЖНОСТИ ГАЗОВ
ПСИХРОМЕТРИЧЕСКИЙ МЕТОД
МЕТОД ТОЧКИ РОСЫ
ИЗМЕРЕНИЕ ВЛАЖНОСТИ ГАЗОВ
ПСИХРОМЕТРИЧЕСКИЙ МЕТОД
МЕТОД ТОЧКИ РОСЫ
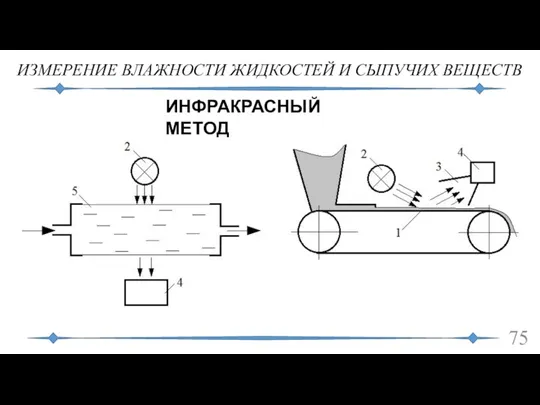
ИЗМЕРЕНИЕ ВЛАЖНОСТИ ЖИДКОСТЕЙ И СЫПУЧИХ ВЕЩЕСТВ
ИНФРАКРАСНЫЙ МЕТОД
ИЗМЕРЕНИЕ ВЛАЖНОСТИ ЖИДКОСТЕЙ И СЫПУЧИХ ВЕЩЕСТВ
ИНФРАКРАСНЫЙ МЕТОД
Промежуточные преобразователи
СНАЧАЛА ДОБАВИТЬ МАГНИТОЭЛЕКТРИЧЕСКИЙ
ПОТОМ «ток-давление» и «сила (перемещение) – ток»
Промежуточные преобразователи
СНАЧАЛА ДОБАВИТЬ МАГНИТОЭЛЕКТРИЧЕСКИЙ
ПОТОМ «ток-давление» и «сила (перемещение) – ток»
УПРАВЛЕНИЕ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
ЦЕЛЬ УПРАВЛЕНИЯ: ДОСТИЖЕНИЕ ЗАДАННОГО ЗНАЧЕНИЯ КРИТЕРИЯ ЭФФЕКТИВНОСТИ (ОПТИМАЛЬНОСТИ)
ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
УПРАВЛЕНИЕ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
ЦЕЛЬ УПРАВЛЕНИЯ: ДОСТИЖЕНИЕ ЗАДАННОГО ЗНАЧЕНИЯ КРИТЕРИЯ ЭФФЕКТИВНОСТИ (ОПТИМАЛЬНОСТИ)
ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
ЗАДАЧИ, РЕШАЕМЫЕ ПРИ РАЗРАБОТКЕ АСУ ТП
ВЫБОР:
РЕГУЛИРУЕМЫХ ПЕРЕМЕННЫХ
КАНАЛОВ ПОДАЧИ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ
КОНТРОЛИРУЕМЫХ ПЕРЕМЕННЫХ
ПЕРЕМЕННЫХ,
ЗАДАЧИ, РЕШАЕМЫЕ ПРИ РАЗРАБОТКЕ АСУ ТП
ВЫБОР:
РЕГУЛИРУЕМЫХ ПЕРЕМЕННЫХ
КАНАЛОВ ПОДАЧИ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ
КОНТРОЛИРУЕМЫХ ПЕРЕМЕННЫХ
ПЕРЕМЕННЫХ,
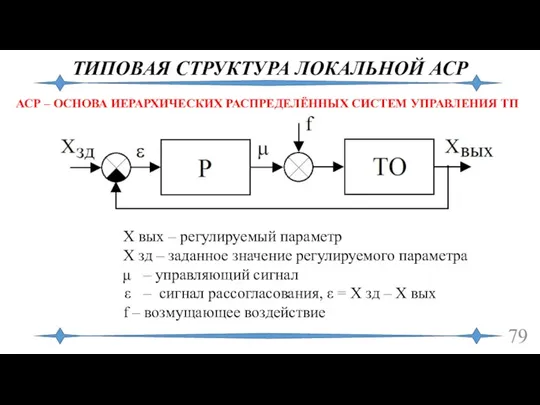
ТИПОВАЯ СТРУКТУРА ЛОКАЛЬНОЙ АСР
Х вых – регулируемый параметр
Х зд – заданное
ТИПОВАЯ СТРУКТУРА ЛОКАЛЬНОЙ АСР
Х вых – регулируемый параметр
Х зд – заданное

ОЦЕНКА ЭФФЕКТИВНОСТИ РАБОТЫ АСР
ПЕРЕХОДНЫЙ ПРОЦЕСС – ИЗМЕНЕНИЕ ВЫХОДНОЙ ПЕРЕМЕННОЙ ЗАМКНУТОЙ АВТОМАТИЧЕСКОЙ
ОЦЕНКА ЭФФЕКТИВНОСТИ РАБОТЫ АСР
ПЕРЕХОДНЫЙ ПРОЦЕСС – ИЗМЕНЕНИЕ ВЫХОДНОЙ ПЕРЕМЕННОЙ ЗАМКНУТОЙ АВТОМАТИЧЕСКОЙ
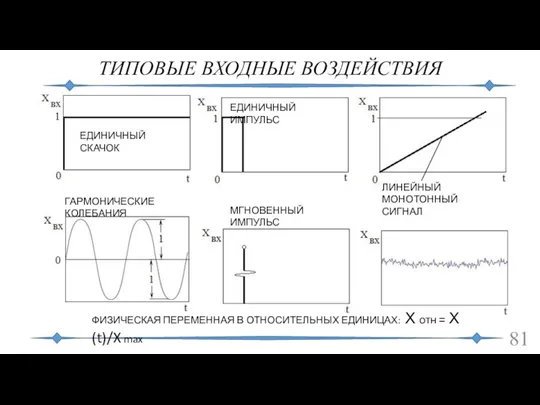
ТИПОВЫЕ ВХОДНЫЕ ВОЗДЕЙСТВИЯ
ЕДИНИЧНЫЙ СКАЧОК
ЕДИНИЧНЫЙ ИМПУЛЬС
ГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ
МГНОВЕННЫЙ ИМПУЛЬС
ФИЗИЧЕСКАЯ ПЕРЕМЕННАЯ В ОТНОСИТЕЛЬНЫХ ЕДИНИЦАХ:
ТИПОВЫЕ ВХОДНЫЕ ВОЗДЕЙСТВИЯ
ЕДИНИЧНЫЙ СКАЧОК
ЕДИНИЧНЫЙ ИМПУЛЬС
ГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ
МГНОВЕННЫЙ ИМПУЛЬС
ФИЗИЧЕСКАЯ ПЕРЕМЕННАЯ В ОТНОСИТЕЛЬНЫХ ЕДИНИЦАХ:
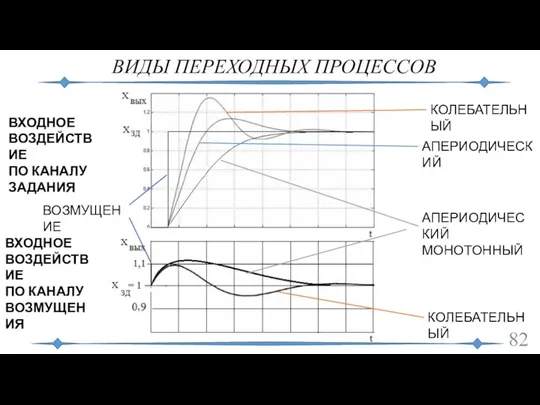
ВИДЫ ПЕРЕХОДНЫХ ПРОЦЕССОВ
ВХОДНОЕ ВОЗДЕЙСТВИЕ
ПО КАНАЛУ ЗАДАНИЯ
ВХОДНОЕ ВОЗДЕЙСТВИЕ
ПО КАНАЛУ ВОЗМУЩЕНИЯ
КОЛЕБАТЕЛЬНЫЙ
АПЕРИОДИЧЕСКИЙ
КОЛЕБАТЕЛЬНЫЙ
АПЕРИОДИЧЕСКИЙ
МОНОТОННЫЙ
ВОЗМУЩЕНИЕ
ВИДЫ ПЕРЕХОДНЫХ ПРОЦЕССОВ
ВХОДНОЕ ВОЗДЕЙСТВИЕ
ПО КАНАЛУ ЗАДАНИЯ
ВХОДНОЕ ВОЗДЕЙСТВИЕ
ПО КАНАЛУ ВОЗМУЩЕНИЯ
КОЛЕБАТЕЛЬНЫЙ
АПЕРИОДИЧЕСКИЙ
КОЛЕБАТЕЛЬНЫЙ
АПЕРИОДИЧЕСКИЙ
МОНОТОННЫЙ
ВОЗМУЩЕНИЕ
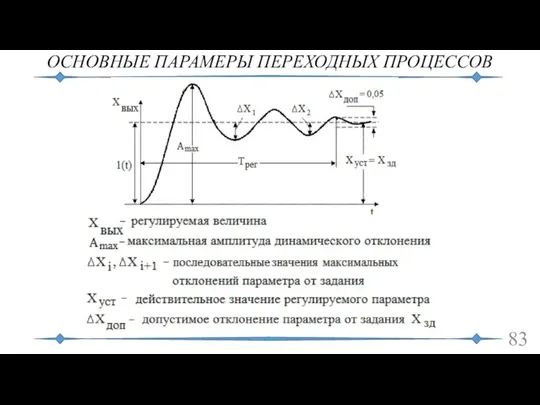
ОСНОВНЫЕ ПАРАМЕРЫ ПЕРЕХОДНЫХ ПРОЦЕССОВ
ОСНОВНЫЕ ПАРАМЕРЫ ПЕРЕХОДНЫХ ПРОЦЕССОВ
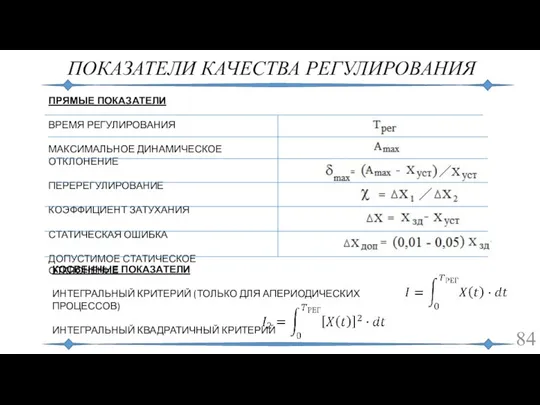
ПОКАЗАТЕЛИ КАЧЕСТВА РЕГУЛИРОВАНИЯ
КОСВЕННЫЕ ПОКАЗАТЕЛИ
ИНТЕГРАЛЬНЫЙ КРИТЕРИЙ (ТОЛЬКО ДЛЯ АПЕРИОДИЧЕСКИХ ПРОЦЕССОВ)
ИНТЕГРАЛЬНЫЙ КВАДРАТИЧНЫЙ КРИТЕРИЙ
ПРЯМЫЕ
ПОКАЗАТЕЛИ КАЧЕСТВА РЕГУЛИРОВАНИЯ
КОСВЕННЫЕ ПОКАЗАТЕЛИ
ИНТЕГРАЛЬНЫЙ КРИТЕРИЙ (ТОЛЬКО ДЛЯ АПЕРИОДИЧЕСКИХ ПРОЦЕССОВ)
ИНТЕГРАЛЬНЫЙ КВАДРАТИЧНЫЙ КРИТЕРИЙ
ПРЯМЫЕ
АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ
РЕГУЛЯТОР – АВТОМАТИЧЕСКОЕ УСТРОЙСТВО, ПРЕДНАЗНАЧЕННОЕ ДЛЯ СТАБИЛИЗАЦИИ ДИНАМИЧЕСКИХ ПАРАМЕТРОВ НА
АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ
РЕГУЛЯТОР – АВТОМАТИЧЕСКОЕ УСТРОЙСТВО, ПРЕДНАЗНАЧЕННОЕ ДЛЯ СТАБИЛИЗАЦИИ ДИНАМИЧЕСКИХ ПАРАМЕТРОВ НА
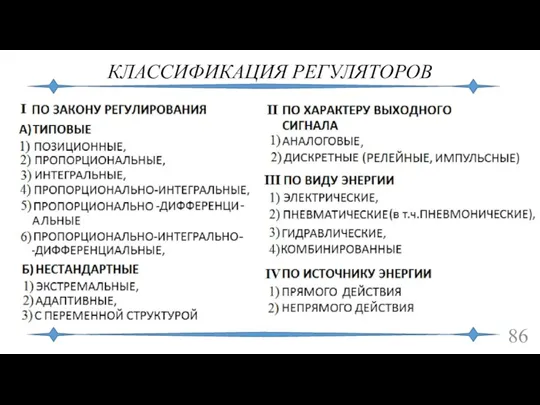
КЛАССИФИКАЦИЯ РЕГУЛЯТОРОВ
КЛАССИФИКАЦИЯ РЕГУЛЯТОРОВ
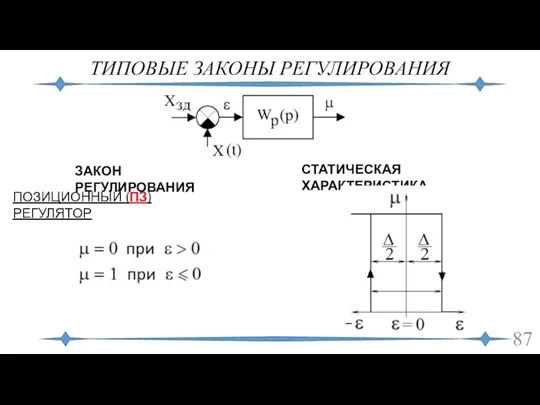
ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
ПОЗИЦИОННЫЙ (ПЗ) РЕГУЛЯТОР
ЗАКОН РЕГУЛИРОВАНИЯ
СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА
ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
ПОЗИЦИОННЫЙ (ПЗ) РЕГУЛЯТОР
ЗАКОН РЕГУЛИРОВАНИЯ
СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА
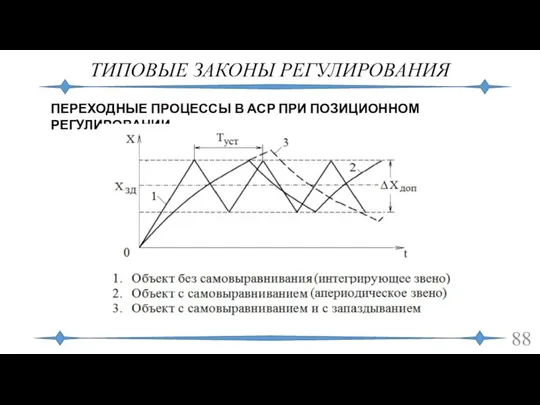
ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
ПЕРЕХОДНЫЕ ПРОЦЕССЫ В АСР ПРИ ПОЗИЦИОННОМ РЕГУЛИРОВАНИИ
ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
ПЕРЕХОДНЫЕ ПРОЦЕССЫ В АСР ПРИ ПОЗИЦИОННОМ РЕГУЛИРОВАНИИ
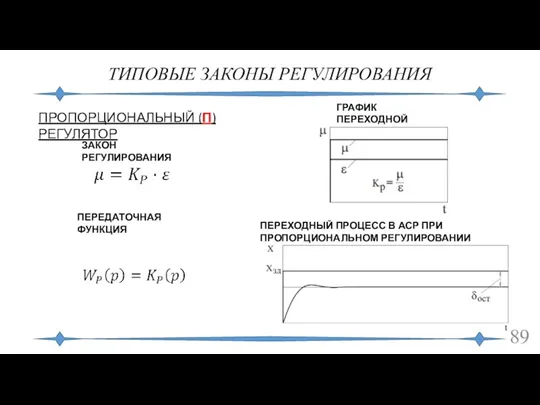
ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
ПРОПОРЦИОНАЛЬНЫЙ (П) РЕГУЛЯТОР
ЗАКОН РЕГУЛИРОВАНИЯ
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
ПЕРЕХОДНЫЙ ПРОЦЕСС В АСР ПРИ
ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
ПРОПОРЦИОНАЛЬНЫЙ (П) РЕГУЛЯТОР
ЗАКОН РЕГУЛИРОВАНИЯ
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
ПЕРЕХОДНЫЙ ПРОЦЕСС В АСР ПРИ
ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
ЗАКОН РЕГУЛИРОВАНИЯ
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
ПЕРЕХОДНЫЙ ПРОЦЕСС В АСР ПРИ ИНТРЕГРАЛЬНОМ
РЕГУЛИРОВАНИИ
ИНТЕГРАЛЬНЫЙ
ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
ЗАКОН РЕГУЛИРОВАНИЯ
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
ПЕРЕХОДНЫЙ ПРОЦЕСС В АСР ПРИ ИНТРЕГРАЛЬНОМ
РЕГУЛИРОВАНИИ
ИНТЕГРАЛЬНЫЙ
ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
ПРОПОРЦИОНАЛЬНО - ИНТЕГРАЛЬНЫЙ (ПИ) РЕГУЛЯТОР
ЗАКОН РЕГУЛИРОВАНИЯ
ПЕРЕХОДНЫЙ ПРОЦЕСС В АСР
ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
ПРОПОРЦИОНАЛЬНО - ИНТЕГРАЛЬНЫЙ (ПИ) РЕГУЛЯТОР
ЗАКОН РЕГУЛИРОВАНИЯ
ПЕРЕХОДНЫЙ ПРОЦЕСС В АСР
ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ (ПИД) РЕГУЛЯТОР
ЗАКОН РЕГУЛИРОВАНИЯ
ПЕРЕХОДНЫЙ ПРОЦЕСС В АСР ПРИ ПИД-РЕГУЛИРОВАНИИ
ПЕРЕДАТОЧНАЯ
ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ (ПИД) РЕГУЛЯТОР
ЗАКОН РЕГУЛИРОВАНИЯ
ПЕРЕХОДНЫЙ ПРОЦЕСС В АСР ПРИ ПИД-РЕГУЛИРОВАНИИ
ПЕРЕДАТОЧНАЯ
ТИПОВЫЕ СТРУКТУРЫ АСР
ОДНОКОНТУРНАЯ АСР
- ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ОБЪЕКТА РЕГУЛИРОВАНИЯ
- ЗАКОН РЕГУЛИРОВАНИЯ В
ТИПОВЫЕ СТРУКТУРЫ АСР
ОДНОКОНТУРНАЯ АСР
- ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ОБЪЕКТА РЕГУЛИРОВАНИЯ
- ЗАКОН РЕГУЛИРОВАНИЯ В
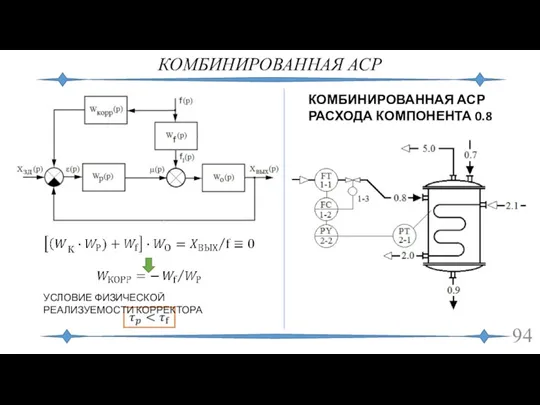
КОМБИНИРОВАННАЯ АСР
УСЛОВИЕ ФИЗИЧЕСКОЙ РЕАЛИЗУЕМОСТИ КОРРЕКТОРА
КОМБИНИРОВАННАЯ АСР РАСХОДА КОМПОНЕНТА 0.8
КОМБИНИРОВАННАЯ АСР
УСЛОВИЕ ФИЗИЧЕСКОЙ РЕАЛИЗУЕМОСТИ КОРРЕКТОРА
КОМБИНИРОВАННАЯ АСР РАСХОДА КОМПОНЕНТА 0.8
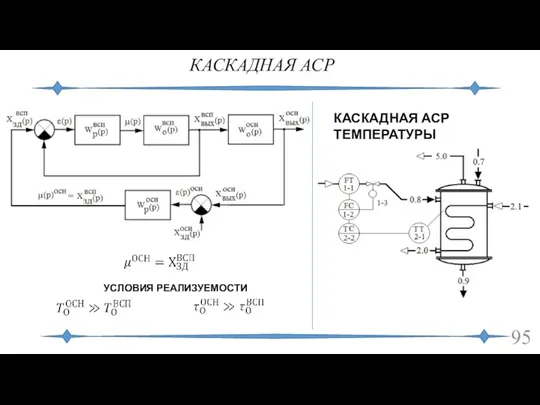
КАСКАДНАЯ АСР
КАСКАДНАЯ АСР ТЕМПЕРАТУРЫ
УСЛОВИЯ РЕАЛИЗУЕМОСТИ
КАСКАДНАЯ АСР
КАСКАДНАЯ АСР ТЕМПЕРАТУРЫ
УСЛОВИЯ РЕАЛИЗУЕМОСТИ
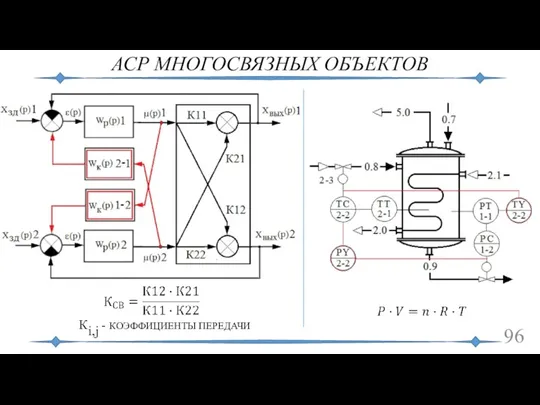
АСР МНОГОСВЯЗНЫХ ОБЪЕКТОВ
К - КОЭФФИЦИЕНТЫ ПЕРЕДАЧИ
i,j
АСР МНОГОСВЯЗНЫХ ОБЪЕКТОВ
К - КОЭФФИЦИЕНТЫ ПЕРЕДАЧИ
i,j
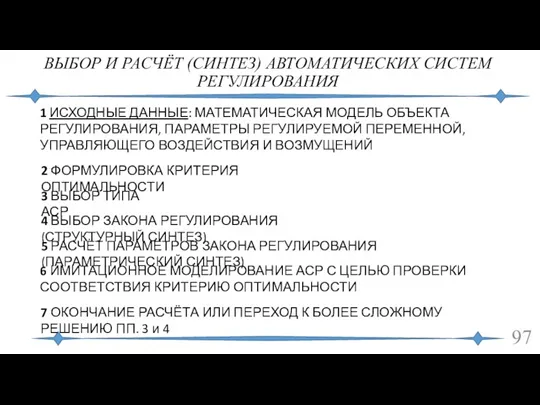
ВЫБОР И РАСЧЁТ (СИНТЕЗ) АВТОМАТИЧЕСКИХ СИСТЕМ РЕГУЛИРОВАНИЯ
2 ФОРМУЛИРОВКА КРИТЕРИЯ ОПТИМАЛЬНОСТИ
1 ИСХОДНЫЕ
ВЫБОР И РАСЧЁТ (СИНТЕЗ) АВТОМАТИЧЕСКИХ СИСТЕМ РЕГУЛИРОВАНИЯ
2 ФОРМУЛИРОВКА КРИТЕРИЯ ОПТИМАЛЬНОСТИ
1 ИСХОДНЫЕ
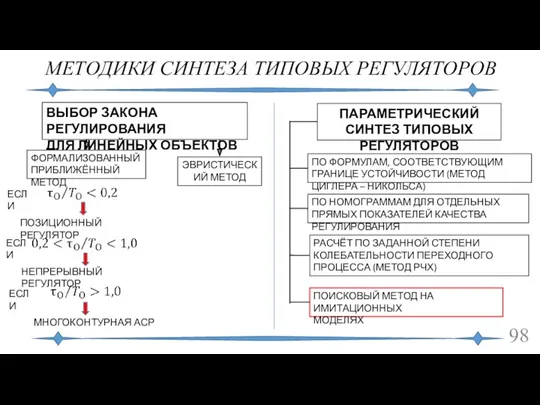
МЕТОДИКИ СИНТЕЗА ТИПОВЫХ РЕГУЛЯТОРОВ
ВЫБОР ЗАКОНА РЕГУЛИРОВАНИЯ
ДЛЯ ЛИНЕЙНЫХ ОБЪЕКТОВ
ФОРМАЛИЗОВАННЫЙ
ПРИБЛИЖЁННЫЙ МЕТОД
ЭВРИСТИЧЕСКИЙ МЕТОД
ПОЗИЦИОННЫЙ РЕГУЛЯТОР
НЕПРЕРЫВНЫЙ
МЕТОДИКИ СИНТЕЗА ТИПОВЫХ РЕГУЛЯТОРОВ
ВЫБОР ЗАКОНА РЕГУЛИРОВАНИЯ
ДЛЯ ЛИНЕЙНЫХ ОБЪЕКТОВ
ФОРМАЛИЗОВАННЫЙ
ПРИБЛИЖЁННЫЙ МЕТОД
ЭВРИСТИЧЕСКИЙ МЕТОД
ПОЗИЦИОННЫЙ РЕГУЛЯТОР
НЕПРЕРЫВНЫЙ
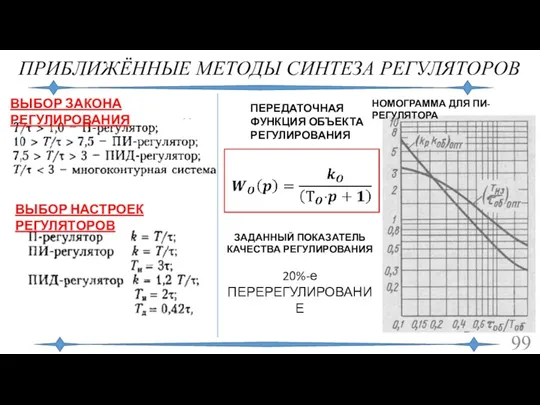
ПРИБЛИЖЁННЫЕ МЕТОДЫ СИНТЕЗА РЕГУЛЯТОРОВ
ВЫБОР ЗАКОНА РЕГУЛИРОВАНИЯ
ВЫБОР НАСТРОЕК РЕГУЛЯТОРОВ
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ОБЪЕКТА РЕГУЛИРОВАНИЯ
НОМОГРАММА
ПРИБЛИЖЁННЫЕ МЕТОДЫ СИНТЕЗА РЕГУЛЯТОРОВ
ВЫБОР ЗАКОНА РЕГУЛИРОВАНИЯ
ВЫБОР НАСТРОЕК РЕГУЛЯТОРОВ
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ОБЪЕКТА РЕГУЛИРОВАНИЯ
НОМОГРАММА

ФИЗИЧЕСКАЯ РЕАЛИЗАЦИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ
БЕЗ ИСПОЛНИТЕЛЬНОЙ ЧАСТИ УПРАВЛЕНИЕ НЕВОЗМОЖНО
ФИЗИЧЕСКАЯ РЕАЛИЗАЦИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ
БЕЗ ИСПОЛНИТЕЛЬНОЙ ЧАСТИ УПРАВЛЕНИЕ НЕВОЗМОЖНО
БАЗОВЫЕ ОПРЕДЕЛЕНИЯ
ЗАДАЧА ИСПОЛНИТЕЛЬНОЙ ЧАСТИ АСР – ПРЕОБРАЗОВАНИЕ УПРАВЛЯЮЩЕГО СИГНАЛА В УПРАВЛЯЮЩЕЕ
БАЗОВЫЕ ОПРЕДЕЛЕНИЯ
ЗАДАЧА ИСПОЛНИТЕЛЬНОЙ ЧАСТИ АСР – ПРЕОБРАЗОВАНИЕ УПРАВЛЯЮЩЕГО СИГНАЛА В УПРАВЛЯЮЩЕЕ
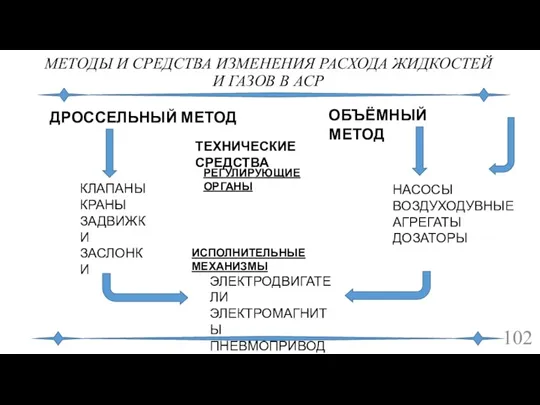
МЕТОДЫ И СРЕДСТВА ИЗМЕНЕНИЯ РАСХОДА ЖИДКОСТЕЙ И ГАЗОВ В АСР
ОБЪЁМНЫЙ МЕТОД
ДРОССЕЛЬНЫЙ
МЕТОДЫ И СРЕДСТВА ИЗМЕНЕНИЯ РАСХОДА ЖИДКОСТЕЙ И ГАЗОВ В АСР
ОБЪЁМНЫЙ МЕТОД
ДРОССЕЛЬНЫЙ
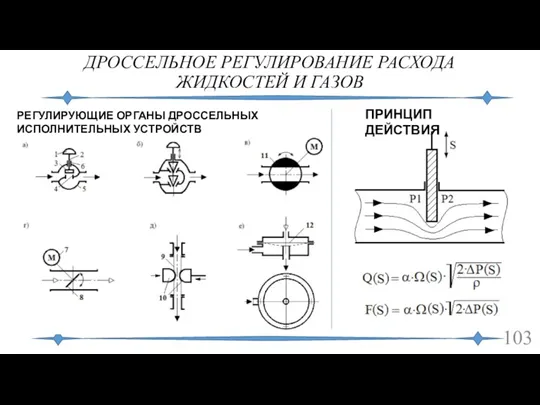
ДРОССЕЛЬНОЕ РЕГУЛИРОВАНИЕ РАСХОДА ЖИДКОСТЕЙ И ГАЗОВ
РЕГУЛИРУЮЩИЕ ОРГАНЫ ДРОССЕЛЬНЫХ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ
ПРИНЦИП ДЕЙСТВИЯ
ДРОССЕЛЬНОЕ РЕГУЛИРОВАНИЕ РАСХОДА ЖИДКОСТЕЙ И ГАЗОВ
РЕГУЛИРУЮЩИЕ ОРГАНЫ ДРОССЕЛЬНЫХ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ
ПРИНЦИП ДЕЙСТВИЯ
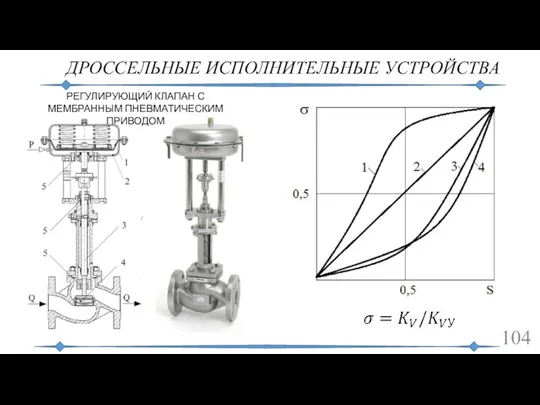
ДРОССЕЛЬНЫЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА
РЕГУЛИРУЮЩИЙ КЛАПАН С МЕМБРАННЫМ ПНЕВМАТИЧЕСКИМ ПРИВОДОМ
ДРОССЕЛЬНЫЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА
РЕГУЛИРУЮЩИЙ КЛАПАН С МЕМБРАННЫМ ПНЕВМАТИЧЕСКИМ ПРИВОДОМ

ДРОССЕЛЬНЫЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА
РЕГУЛИРУЮЩИЙ КЛАПАН
С ЭЛЕКТРОПРИВОДОМ
РЕГУЛИРУЮЩИЙ КЛАПАН
С МЕМБРАННЫМ ПНЕВМОПРИВОДОМ
ПОВОРОТНАЯ ЗАСЛОНКА
ДРОССЕЛЬНЫЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА
РЕГУЛИРУЮЩИЙ КЛАПАН
С ЭЛЕКТРОПРИВОДОМ
РЕГУЛИРУЮЩИЙ КЛАПАН
С МЕМБРАННЫМ ПНЕВМОПРИВОДОМ
ПОВОРОТНАЯ ЗАСЛОНКА
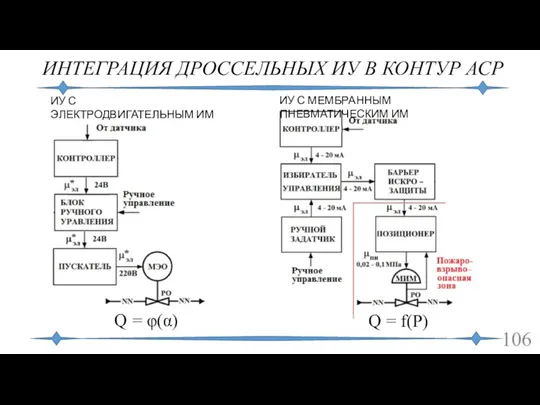
ИНТЕГРАЦИЯ ДРОССЕЛЬНЫХ ИУ В КОНТУР АСР
ИУ С ЭЛЕКТРОДВИГАТЕЛЬНЫМ ИМ
ИУ С МЕМБРАННЫМ
ИНТЕГРАЦИЯ ДРОССЕЛЬНЫХ ИУ В КОНТУР АСР
ИУ С ЭЛЕКТРОДВИГАТЕЛЬНЫМ ИМ
ИУ С МЕМБРАННЫМ
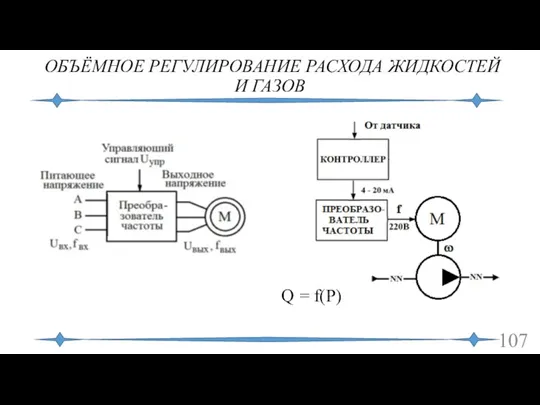
ОБЪЁМНОЕ РЕГУЛИРОВАНИЕ РАСХОДА ЖИДКОСТЕЙ И ГАЗОВ
Q = f(P)
ОБЪЁМНОЕ РЕГУЛИРОВАНИЕ РАСХОДА ЖИДКОСТЕЙ И ГАЗОВ
Q = f(P)

УПРАВЛЕНИЕ РАСХОДОМ СЫПУЧИХ МАТЕРИАЛОВ
МЕХАНИЧЕСКИЕ ПИТАТЕЛИ ДЛЯ СЫПУЧИХ МАТЕРИАЛОВ
УПРАВЛЕНИЕ РАСХОДОМ СЫПУЧИХ МАТЕРИАЛОВ
МЕХАНИЧЕСКИЕ ПИТАТЕЛИ ДЛЯ СЫПУЧИХ МАТЕРИАЛОВ
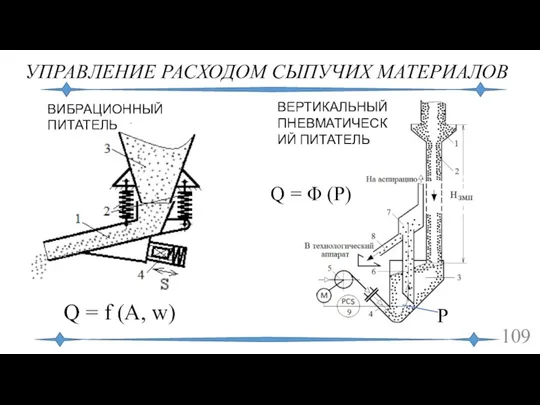
УПРАВЛЕНИЕ РАСХОДОМ СЫПУЧИХ МАТЕРИАЛОВ
ВИБРАЦИОННЫЙ ПИТАТЕЛЬ
ВЕРТИКАЛЬНЫЙ ПНЕВМАТИЧЕСКИЙ ПИТАТЕЛЬ
Q = f (A, w)
Q
УПРАВЛЕНИЕ РАСХОДОМ СЫПУЧИХ МАТЕРИАЛОВ
ВИБРАЦИОННЫЙ ПИТАТЕЛЬ
ВЕРТИКАЛЬНЫЙ ПНЕВМАТИЧЕСКИЙ ПИТАТЕЛЬ
Q = f (A, w)
Q
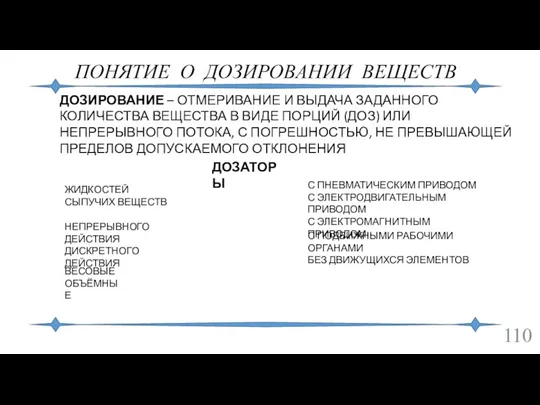
ПОНЯТИЕ О ДОЗИРОВАНИИ ВЕЩЕСТВ
ДОЗИРОВАНИЕ – ОТМЕРИВАНИЕ И ВЫДАЧА ЗАДАННОГО КОЛИЧЕСТВА ВЕЩЕСТВА
ПОНЯТИЕ О ДОЗИРОВАНИИ ВЕЩЕСТВ
ДОЗИРОВАНИЕ – ОТМЕРИВАНИЕ И ВЫДАЧА ЗАДАННОГО КОЛИЧЕСТВА ВЕЩЕСТВА
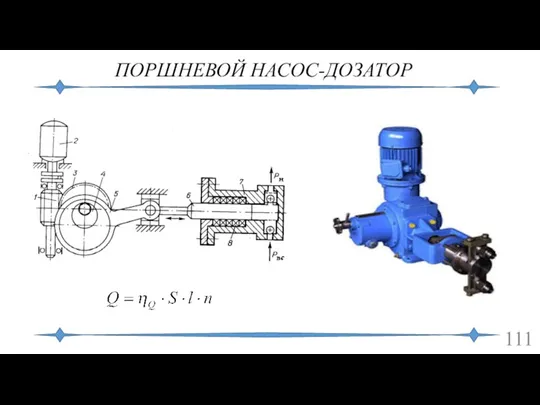
ПОРШНЕВОЙ НАСОС-ДОЗАТОР
ПОРШНЕВОЙ НАСОС-ДОЗАТОР
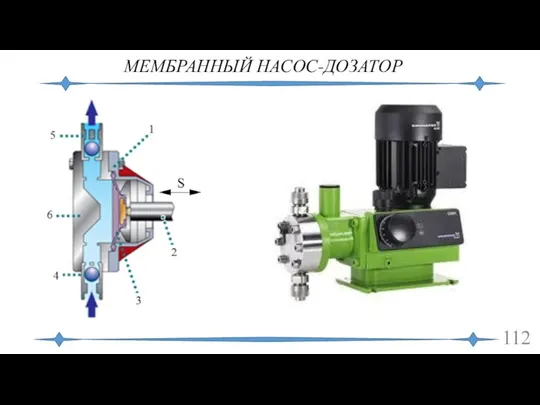
МЕМБРАННЫЙ НАСОС-ДОЗАТОР
МЕМБРАННЫЙ НАСОС-ДОЗАТОР
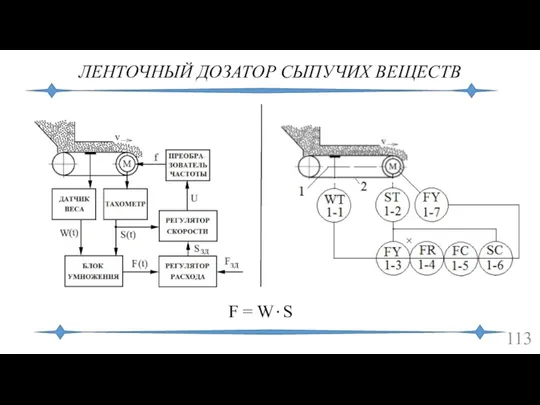
ЛЕНТОЧНЫЙ ДОЗАТОР СЫПУЧИХ ВЕЩЕСТВ
F = W S
.
ЛЕНТОЧНЫЙ ДОЗАТОР СЫПУЧИХ ВЕЩЕСТВ
F = W S
.

ЛЕНТОЧНЫЙ ДОЗАТОР СЫПУЧИХ ВЕЩЕСТВ «ДОЗА»
1 – ЛЕНТОЧНЫЙ ПИТАТЕЛЬ
2 – ШКАФ УПРАВЛЕНИЯ
3
ЛЕНТОЧНЫЙ ДОЗАТОР СЫПУЧИХ ВЕЩЕСТВ «ДОЗА»
1 – ЛЕНТОЧНЫЙ ПИТАТЕЛЬ
2 – ШКАФ УПРАВЛЕНИЯ
3

ЛЕНТОЧНЫЙ АВТОМАТИЧЕСКИЙ ДОЗАТОР
5
4
3
2
1
ЛЕНТОЧНЫЙ АВТОМАТИЧЕСКИЙ ДОЗАТОР
5
4
3
2
1
АТК – МНОГОПАРАМЕТРИЧЕСКАЯ СИСТЕМА
ЭЛЕМЕНТЫ АТК
ПРОЕКТИРОВАНИЕ АТК ТРЕБУЕТ ОПРЕДЕЛЕНИЯ МЕЖДИСЦИПЛИНАРНЫХ СВЯЗЕЙ
АТК – МНОГОПАРАМЕТРИЧЕСКАЯ СИСТЕМА
ЭЛЕМЕНТЫ АТК
ПРОЕКТИРОВАНИЕ АТК ТРЕБУЕТ ОПРЕДЕЛЕНИЯ МЕЖДИСЦИПЛИНАРНЫХ СВЯЗЕЙ
ВОПРОСЫ К ЗАЧЁТУ И ЭКЗАМЕНУ
Автоматизация технологических процессов: основные понятия и определения.
Иерархическая
ВОПРОСЫ К ЗАЧЁТУ И ЭКЗАМЕНУ
Автоматизация технологических процессов: основные понятия и определения.
Иерархическая
ВОПРОСЫ 2
11. Характеристики процесса измерения и средств измерений.
12. Виды технических измерений
13.
ВОПРОСЫ 2
11. Характеристики процесса измерения и средств измерений.
12. Виды технических измерений
13.
ВОПРОСЫ 3
22. Термоэлектрический эффект. Термоэлектрические термометры
23. Потенциометрический метод измерения
24. Термопреобразователи сопротивления.
25.
ВОПРОСЫ 3
22. Термоэлектрический эффект. Термоэлектрические термометры
23. Потенциометрический метод измерения
24. Термопреобразователи сопротивления.
25.
ВОПРОСЫ 4
35.Пьезометрический, радарный и ёмкостной уровнемеры.
36.Измерение расхода и количества вещества. Классификация
ВОПРОСЫ 4
35.Пьезометрический, радарный и ёмкостной уровнемеры.
36.Измерение расхода и количества вещества. Классификация
ВОПРОСЫ 5
46. Измерение вязкости жидкостей. Вибрационный и ротационный вискозиметры.
47. Влажность веществ
ВОПРОСЫ 5
46. Измерение вязкости жидкостей. Вибрационный и ротационный вискозиметры.
47. Влажность веществ
ВОПРОСЫ 6
57. Принцип инвариантности. Комбинированная АСР.
58. Каскадные АСР.
59. АСР многосвязных объектов.
60.
ВОПРОСЫ 6
57. Принцип инвариантности. Комбинированная АСР.
58. Каскадные АСР.
59. АСР многосвязных объектов.
60.
 Microsoft Word 2007. Работа с файлами
Microsoft Word 2007. Работа с файлами Информация. Информационные процессы. (повторение)
Информация. Информационные процессы. (повторение) Сравнительный анализ крупнейших IT компаний России
Сравнительный анализ крупнейших IT компаний России Архитектура машин. Хранение данных. Обработка данных. (Лекции 2-3.3)
Архитектура машин. Хранение данных. Обработка данных. (Лекции 2-3.3) Непозиционные системы счисления
Непозиционные системы счисления Компьютерные презентации. Анимация. 5 класс
Компьютерные презентации. Анимация. 5 класс Генетический алгоритм
Генетический алгоритм Форматирование документа. 9 класс
Форматирование документа. 9 класс Хаб. СмартХаб WeDo 2.0
Хаб. СмартХаб WeDo 2.0 Объектно-ориентированное программирование. Практические работы Pascal ABC
Объектно-ориентированное программирование. Практические работы Pascal ABC Ақпарат және ақпараттық үрдістер
Ақпарат және ақпараттық үрдістер Сети связи следующего поколения (NGN)
Сети связи следующего поколения (NGN) Основы алгоритмизации и процедурное программирование. Простейшие конструкции языка Delphi Pascal
Основы алгоритмизации и процедурное программирование. Простейшие конструкции языка Delphi Pascal Периодические издания
Периодические издания Создание документов в текстовых редакторах. Форматирование документов в текстовых редакторах.
Создание документов в текстовых редакторах. Форматирование документов в текстовых редакторах. Урок информатики в 5 классе по ФГОС
Урок информатики в 5 классе по ФГОС Двумерные массивы
Двумерные массивы Битва на Смешариковом поле. Эпизод третий…
Битва на Смешариковом поле. Эпизод третий… Алгоритм, свойства алгоритма, графическое описания и виды алгоритмов. Тема 1
Алгоритм, свойства алгоритма, графическое описания и виды алгоритмов. Тема 1 Встроенный язык
Встроенный язык Функционирование ЭВМ с канальной организацией
Функционирование ЭВМ с канальной организацией Адресация в сетях TCP/IP
Адресация в сетях TCP/IP Рекурсия и рекурсивные алгоритмы
Рекурсия и рекурсивные алгоритмы Разработка системы сокрытия информации в видеофайлах
Разработка системы сокрытия информации в видеофайлах Как осуществить платеж через портал Госуслуг
Как осуществить платеж через портал Госуслуг Информационное общество
Информационное общество Социальные сети
Социальные сети Публикация в международном издании
Публикация в международном издании