- Трехмерная графика

Содержание
- 2. ПЛАН: Трехмерное пространство Пространственные модели Источники света и материалы Графический 3D-конвейер Проекции Буфер глубины Программы трехмерной
- 3. ТРЕХМЕРНОЕ ПРОСТРАНСТВО Трехмерное пространство – это куб в кибернетическом пространстве, создаваемом в памяти компьютера. Наименьшей областью
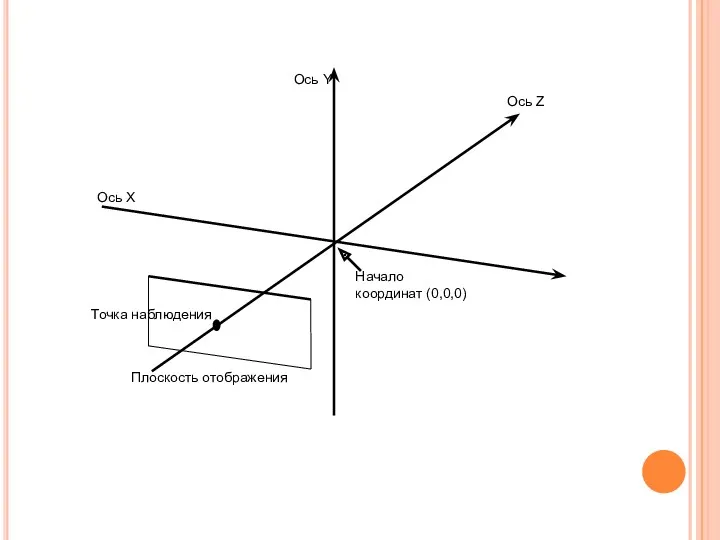
- 4. Точка наблюдения – позиция в трехмерном пространстве, определяющая положение наблюдателя. Воображаемая плоскость, проходящая через точку наблюдения
- 6. В большинстве программ 3D-графики присутствуют следующие сущности трехмерной сцены: объекты; наблюдатель (камера); источники света; свойства материалов
- 7. ПРОСТРАНСТВЕННЫЕ МОДЕЛИ Существует три основных типа моделей описания трехмерных объектов: с помощью проволочной сетки, описание объекта
- 8. ПРОВОЛОЧНАЯ СЕТКА (WIRE-FRAME) Суть: поверхности строится из серий пересекающихся линий, принадлежащих поверхности объекта. Как правило, в
- 9. Описание объекта поверхностями Суть: объект представляется в виде тонких поверхностей, под которым находится пустое незаполненное пространство.
- 10. Описание объекта сплошными телами Суть заключается в представлении сложного объекта в виде объединения простых объемных примитивов.
- 11. ПРОСТРАНСТВЕННЫЕ МОДЕЛИ Основой моделирования объемных тел в трехмерном пространстве являются плоские многоугольники. Многоугольники бывают выпуклыми и
- 12. Для повышения скорости рендеринга на практике многоугольники разбивают на простейшие фигуры — треугольники, поскольку они обладают
- 13. Многоугольники могут содержать треугольники с общими вершинами (так называемые ленты треугольников и веера треугольников), что значительно
- 14. Если вектор нормали направлен к плоскости визуализации, эта сторона объекта считается передней и проецируется на плоскость.
- 15. ТИПЫ ИСТОЧНИКОВ СВЕТА Точечный – источник, светящий во всех направлениях (лампочка).
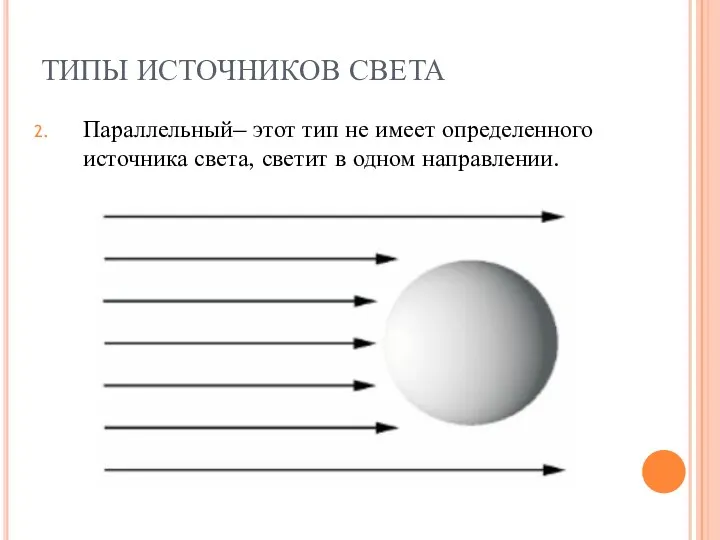
- 16. ТИПЫ ИСТОЧНИКОВ СВЕТА Параллельный– этот тип не имеет определенного источника света, светит в одном направлении.
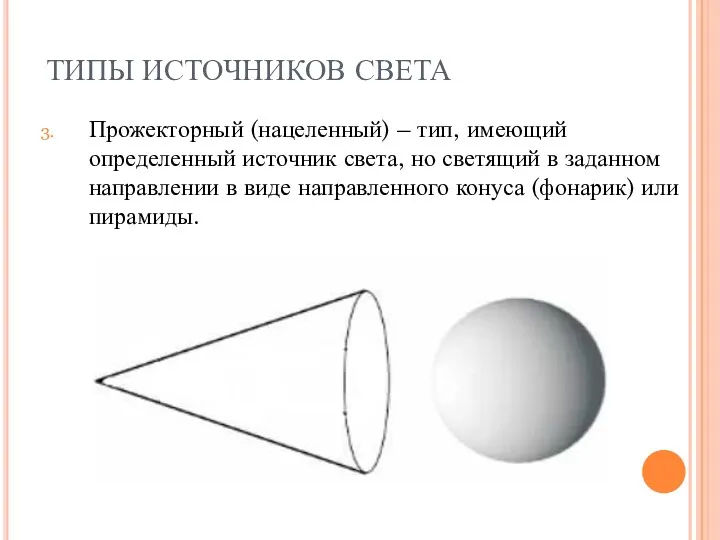
- 17. ТИПЫ ИСТОЧНИКОВ СВЕТА Прожекторный (нацеленный) – тип, имеющий определенный источник света, но светящий в заданном направлении
- 18. ТИПЫ ОТРАЖЕНИЯ СВЕТА ОТ ПОВЕРХНОСТИ При расчете освещенности грани в компьютерной графике учитывают следующие типы отражения
- 19. РАССЕЯННОЕ ОТРАЖЕНИЕ Интенсивность освещения граней объектов рассеянным светом считается постоянной в любой точке пространства. Это обусловлено
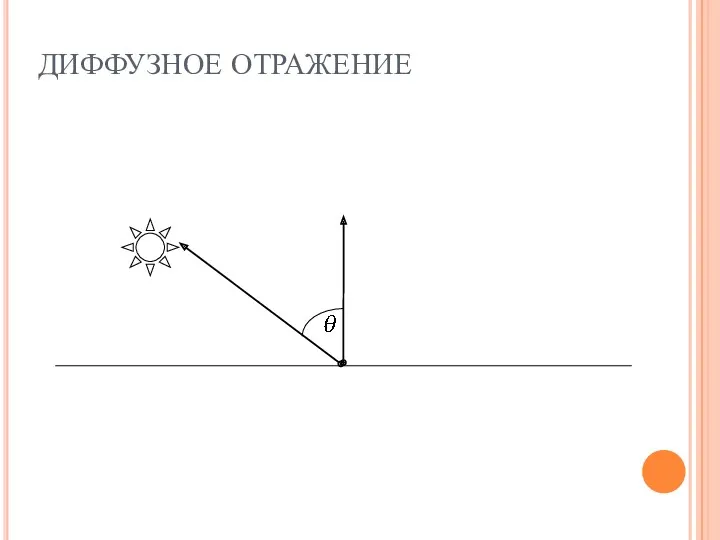
- 20. ДИФФУЗНОЕ ОТРАЖЕНИЕ Интенсивность диффузного отражения пропорциональна косинусу угла между нормалью к поверхности и направлением на источник
- 21. ДИФФУЗНОЕ ОТРАЖЕНИЕ
- 22. ДИФФУЗНОЕ ОТРАЖЕНИЕ Свойством диффузного отражения является равномерность по всем направлениям отраженного света. Поэтому такие объекты имеют
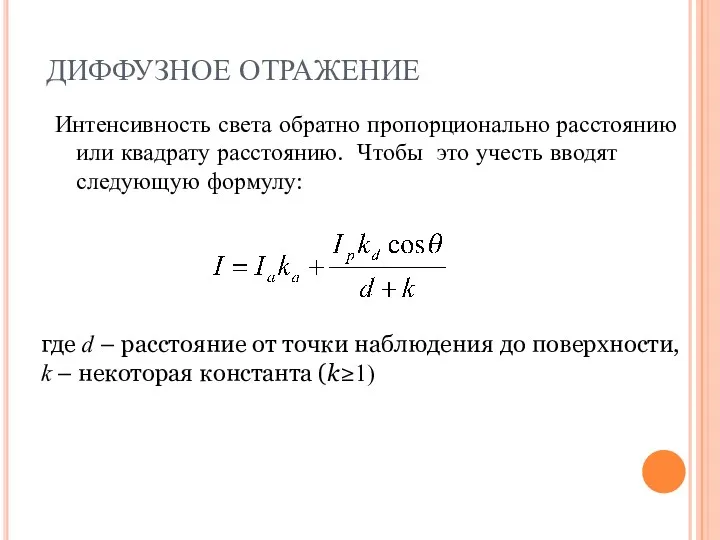
- 23. ДИФФУЗНОЕ ОТРАЖЕНИЕ Интенсивность света обратно пропорционально расстоянию или квадрату расстоянию. Чтобы это учесть вводят следующую формулу:
- 24. ЗЕРКАЛЬНОЕ ОТРАЖЕНИЕ Зеркальное отражение можно получить от любой блестящей поверхности. Блестящие поверхности отражают свет неодинаково по
- 25. ЗЕРКАЛЬНОЕ ОТРАЖЕНИЕ Зеркально отраженный свет можно будет увидеть, если угол между вектором отражения и вектором наблюдения
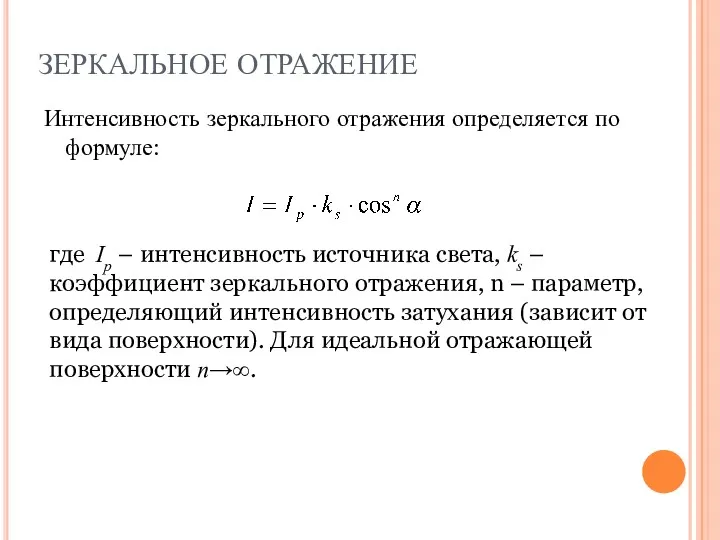
- 26. ЗЕРКАЛЬНОЕ ОТРАЖЕНИЕ Интенсивность зеркального отражения определяется по формуле: где Ip – интенсивность источника света, ks –
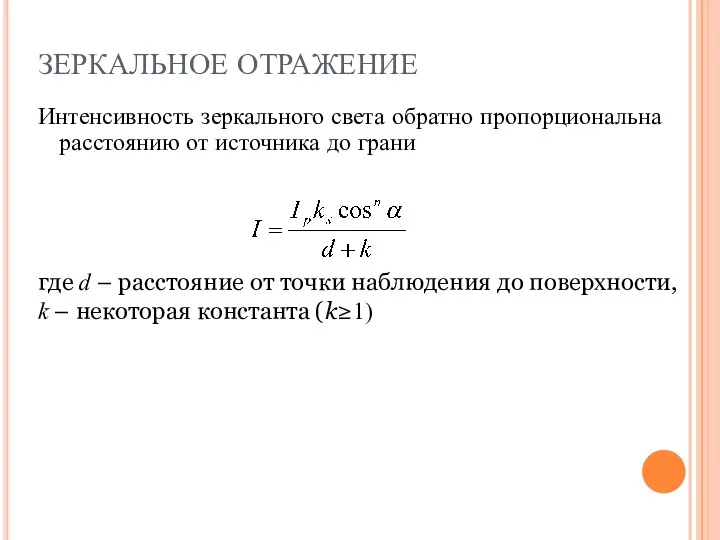
- 27. ЗЕРКАЛЬНОЕ ОТРАЖЕНИЕ Интенсивность зеркального света обратно пропорциональна расстоянию от источника до грани где d – расстояние
- 28. Таким образом, интенсивность грани складывается из трех составляющих: рассеянного света, диффузного света и зеркального света. Формула
- 29. МАТЕРИАЛЫ Материалы – это совокупность настроек, определяющих внешний вид материала. Параметры материала задаются с помощью числовых
- 30. ОСНОВНЫЕ СВОЙСТВА МАТЕРИАЛОВ: Цвет (рассеянный, диффузный, зеркальный) Непрозрачность и прозрачность Отражение – имитация отражения окружающих предметов;
- 31. Текстурные карты – это растровые изображения (в формате jpeg, gif и т.д.) или процедурные (текстуры генерируемые
- 32. Технология композитных текстур: Используются две текстуры: базовая и детальная. Базовая текстура содержит основные элементы и обеспечивает
- 33. ГРАФИЧЕСКИЙ 3D-КОНВЕЙЕР Графический 3D-конвейер – это процесс визуализации трехмерной сцены. Конвейерный принцип обработки информации означает, что
- 34. ЭТАПЫ ГРАФИЧЕСКОГО 3D-КОНВЕЙЕРА Геометрические преобразования Внутреннее представление геометрических объектов должно быть преобразовано на этой стадии в
- 35. ЭТАПЫ ГРАФИЧЕСКОГО 3D-КОНВЕЙЕРА Отсечение Вторая важная операция в графическом конвейере – отсечение (clipping) .
- 36. ЭТАПА ГРАФИЧЕСКОГО 3D-КОНВЕЙЕРА Проективное преобразование Существует множество видов проективного преобразования, некоторые из которых позволяют использовать математический
- 37. ЭТАПЫ ГРАФИЧЕСКОГО 3D-КОНВЕЙЕРА Растровое преобразование Преобразование описания двухмерных объектов в коды засветки пикселей в буфере кадра.
- 38. КАРТИННАЯ ПЛОСКОСТЬ Камеры задают четыре типа параметров, однозначно определяющих характеристики создаваемого ею изображения. Положение камеры задается
- 39. КАРТИННАЯ ПЛОСКОСТЬ Положение камеры (картинной плоскости) определяется некоторой точкой на плоскости, которую будем называть опорной точкой
- 40. КАРТИННАЯ ПЛОСКОСТЬ
- 41. ПРОЕКЦИЙ В общем случае проекции преобразуют точки, заданные в системе координат размерностью n, в системы координат
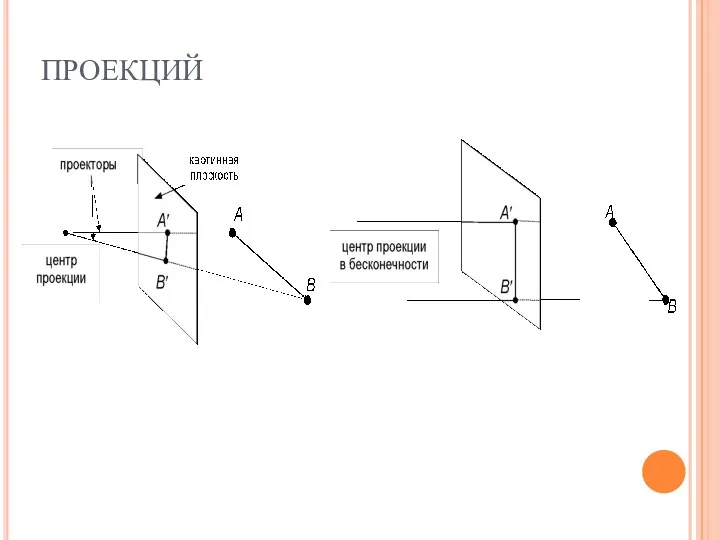
- 42. ПРОЕКЦИЙ Определенный таким образом класс проекций существует под названием плоских геометрических проекций, так как проецирование производится
- 43. ПРОЕКЦИЙ
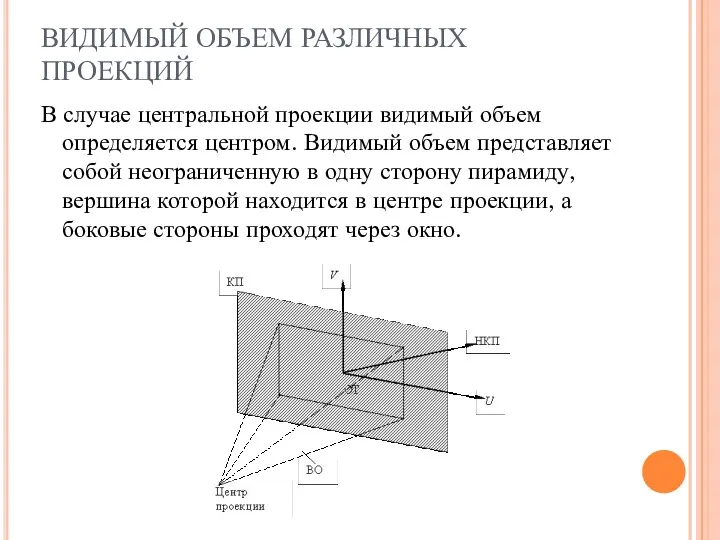
- 44. ВИДИМЫЙ ОБЪЕМ РАЗЛИЧНЫХ ПРОЕКЦИЙ В случае центральной проекции видимый объем определяется центром. Видимый объем представляет собой
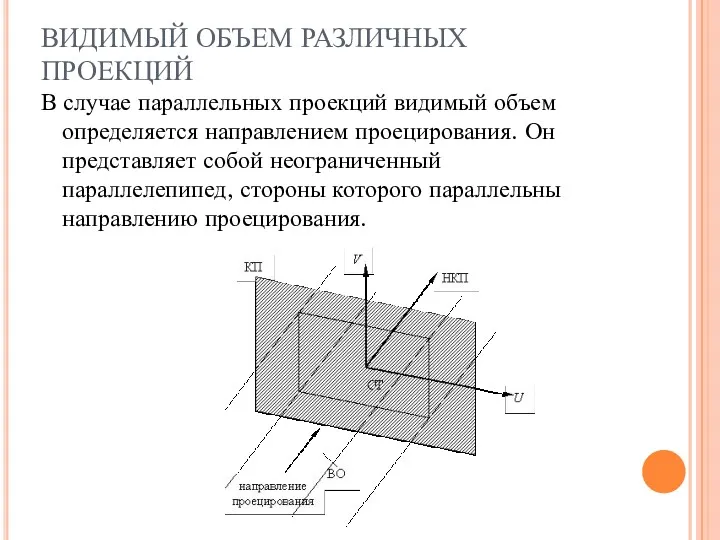
- 45. ВИДИМЫЙ ОБЪЕМ РАЗЛИЧНЫХ ПРОЕКЦИЙ В случае параллельных проекций видимый объем определяется направлением проецирования. Он представляет собой
- 46. ВИДИМЫЙ ОБЪЕМ РАЗЛИЧНЫХ ПРОЕКЦИЙ В общем случае направление проецирования может не совпадать с нормалью картинной плоскости.
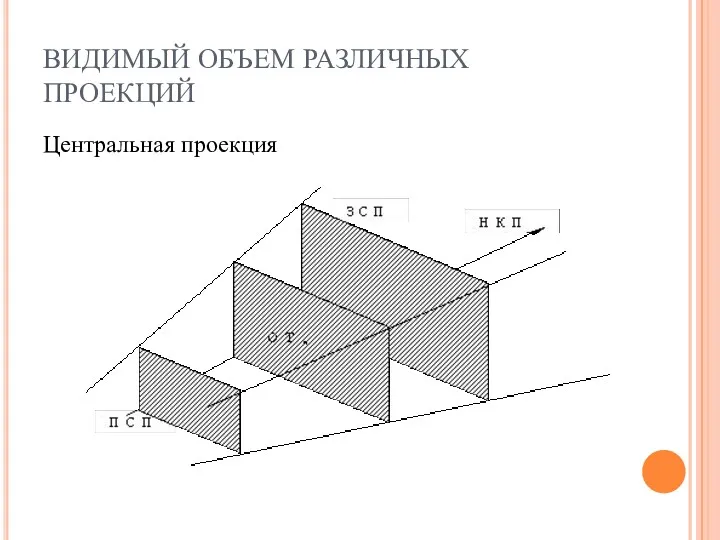
- 47. ВИДИМЫЙ ОБЪЕМ РАЗЛИЧНЫХ ПРОЕКЦИЙ Центральная проекция
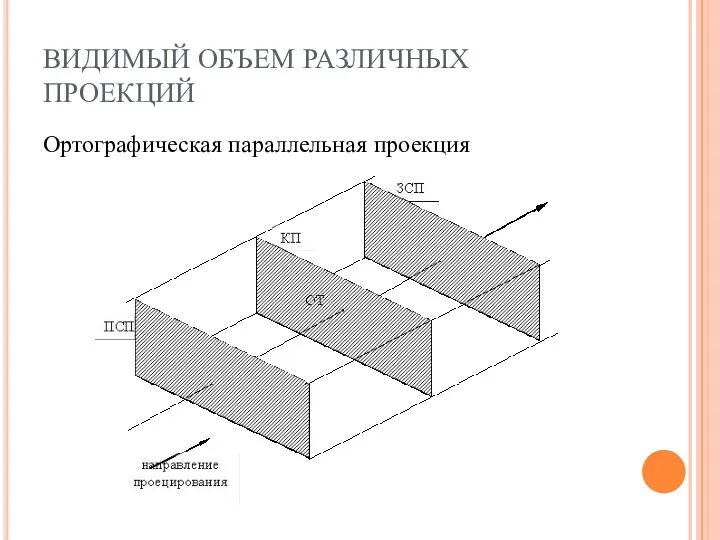
- 48. ВИДИМЫЙ ОБЪЕМ РАЗЛИЧНЫХ ПРОЕКЦИЙ Ортографическая параллельная проекция
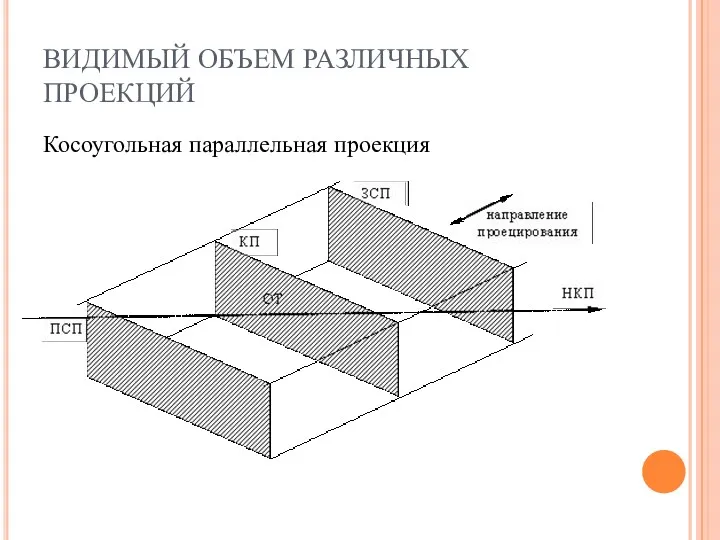
- 49. ВИДИМЫЙ ОБЪЕМ РАЗЛИЧНЫХ ПРОЕКЦИЙ Косоугольная параллельная проекция
- 50. БУФЕР ГЛУБИНЫ Для адекватной визуализации трехмерных объектов в графических библиотеках предусмотрен так называемый буфер глубины или
- 51. ПРИНЦИП РАБОТЫ БУФЕРА ГЛУБИНЫ В начале в z-буфер заносятся (очищается) максимально возможные значения z, а буфер
- 52. ПРОГРАММЫ ТРЕХМЕРНОЙ ГРАФИКИ 3D Studio MAX Corel Bryce Adobe Dimension LightWave 3D Maya Poser Vue d′Esprit
- 54. Скачать презентацию
ПЛАН:
Трехмерное пространство
Пространственные модели
Источники света и материалы
Графический 3D-конвейер
Проекции
Буфер глубины
Программы трехмерной графики
ПЛАН:
Трехмерное пространство
Пространственные модели
Источники света и материалы
Графический 3D-конвейер
Проекции
Буфер глубины
Программы трехмерной графики
ТРЕХМЕРНОЕ ПРОСТРАНСТВО
Трехмерное пространство – это куб в кибернетическом пространстве, создаваемом в
ТРЕХМЕРНОЕ ПРОСТРАНСТВО
Трехмерное пространство – это куб в кибернетическом пространстве, создаваемом в
Точка наблюдения – позиция в трехмерном пространстве, определяющая положение наблюдателя.
Воображаемая
Точка наблюдения – позиция в трехмерном пространстве, определяющая положение наблюдателя.
Воображаемая
В большинстве программ 3D-графики присутствуют следующие сущности трехмерной сцены:
объекты;
наблюдатель (камера);
В большинстве программ 3D-графики присутствуют следующие сущности трехмерной сцены:
объекты;
наблюдатель (камера);
ПРОСТРАНСТВЕННЫЕ МОДЕЛИ
Существует три основных типа моделей описания трехмерных объектов:
с помощью
ПРОСТРАНСТВЕННЫЕ МОДЕЛИ
Существует три основных типа моделей описания трехмерных объектов:
с помощью
ПРОВОЛОЧНАЯ СЕТКА (WIRE-FRAME)
Суть: поверхности строится из серий пересекающихся линий, принадлежащих
ПРОВОЛОЧНАЯ СЕТКА (WIRE-FRAME)
Суть: поверхности строится из серий пересекающихся линий, принадлежащих
Описание объекта поверхностями
Суть: объект представляется в виде тонких поверхностей, под которым
Описание объекта поверхностями
Суть: объект представляется в виде тонких поверхностей, под которым
Описание объекта сплошными телами
Суть заключается в представлении сложного объекта в виде
Описание объекта сплошными телами
Суть заключается в представлении сложного объекта в виде
ПРОСТРАНСТВЕННЫЕ МОДЕЛИ
Основой моделирования объемных тел в трехмерном пространстве являются плоские многоугольники.
Многоугольники
ПРОСТРАНСТВЕННЫЕ МОДЕЛИ
Основой моделирования объемных тел в трехмерном пространстве являются плоские многоугольники.
Многоугольники
Для повышения скорости рендеринга на практике многоугольники разбивают на простейшие фигуры
Для повышения скорости рендеринга на практике многоугольники разбивают на простейшие фигуры
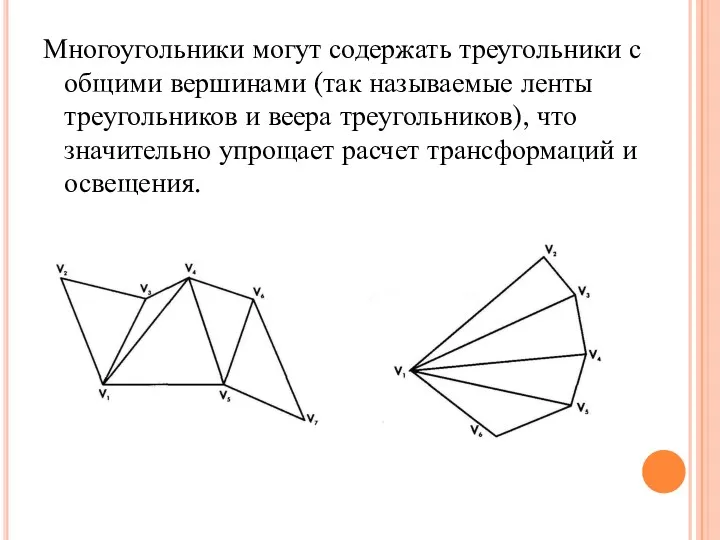
Многоугольники могут содержать треугольники с общими вершинами (так называемые ленты треугольников
Многоугольники могут содержать треугольники с общими вершинами (так называемые ленты треугольников
Если вектор нормали направлен к плоскости визуализации, эта сторона объекта считается
Если вектор нормали направлен к плоскости визуализации, эта сторона объекта считается

ТИПЫ ИСТОЧНИКОВ СВЕТА
Точечный – источник, светящий во всех направлениях (лампочка).
ТИПЫ ИСТОЧНИКОВ СВЕТА
Точечный – источник, светящий во всех направлениях (лампочка).
ТИПЫ ИСТОЧНИКОВ СВЕТА
Параллельный– этот тип не имеет определенного источника света, светит
ТИПЫ ИСТОЧНИКОВ СВЕТА
Параллельный– этот тип не имеет определенного источника света, светит
ТИПЫ ИСТОЧНИКОВ СВЕТА
Прожекторный (нацеленный) – тип, имеющий определенный источник света, но
ТИПЫ ИСТОЧНИКОВ СВЕТА
Прожекторный (нацеленный) – тип, имеющий определенный источник света, но
ТИПЫ ОТРАЖЕНИЯ СВЕТА ОТ ПОВЕРХНОСТИ
При расчете освещенности грани в компьютерной графике
ТИПЫ ОТРАЖЕНИЯ СВЕТА ОТ ПОВЕРХНОСТИ
При расчете освещенности грани в компьютерной графике
РАССЕЯННОЕ ОТРАЖЕНИЕ
Интенсивность освещения граней объектов рассеянным светом считается постоянной в любой
РАССЕЯННОЕ ОТРАЖЕНИЕ
Интенсивность освещения граней объектов рассеянным светом считается постоянной в любой
ДИФФУЗНОЕ ОТРАЖЕНИЕ
Интенсивность диффузного отражения пропорциональна косинусу угла между нормалью к поверхности
ДИФФУЗНОЕ ОТРАЖЕНИЕ
Интенсивность диффузного отражения пропорциональна косинусу угла между нормалью к поверхности
ДИФФУЗНОЕ ОТРАЖЕНИЕ
ДИФФУЗНОЕ ОТРАЖЕНИЕ
ДИФФУЗНОЕ ОТРАЖЕНИЕ
Свойством диффузного отражения является равномерность по всем направлениям отраженного света.
ДИФФУЗНОЕ ОТРАЖЕНИЕ
Свойством диффузного отражения является равномерность по всем направлениям отраженного света.
ДИФФУЗНОЕ ОТРАЖЕНИЕ
Интенсивность света обратно пропорционально расстоянию или квадрату расстоянию. Чтобы это
ДИФФУЗНОЕ ОТРАЖЕНИЕ
Интенсивность света обратно пропорционально расстоянию или квадрату расстоянию. Чтобы это
ЗЕРКАЛЬНОЕ ОТРАЖЕНИЕ
Зеркальное отражение можно получить от любой блестящей поверхности. Блестящие поверхности
ЗЕРКАЛЬНОЕ ОТРАЖЕНИЕ
Зеркальное отражение можно получить от любой блестящей поверхности. Блестящие поверхности

ЗЕРКАЛЬНОЕ ОТРАЖЕНИЕ
Зеркально отраженный свет можно будет увидеть, если угол между вектором
ЗЕРКАЛЬНОЕ ОТРАЖЕНИЕ
Зеркально отраженный свет можно будет увидеть, если угол между вектором
ЗЕРКАЛЬНОЕ ОТРАЖЕНИЕ
Интенсивность зеркального отражения определяется по формуле:
где Ip – интенсивность источника
ЗЕРКАЛЬНОЕ ОТРАЖЕНИЕ
Интенсивность зеркального отражения определяется по формуле:
где Ip – интенсивность источника
ЗЕРКАЛЬНОЕ ОТРАЖЕНИЕ
Интенсивность зеркального света обратно пропорциональна расстоянию от источника до грани
ЗЕРКАЛЬНОЕ ОТРАЖЕНИЕ
Интенсивность зеркального света обратно пропорциональна расстоянию от источника до грани
Таким образом, интенсивность грани складывается из трех составляющих: рассеянного света, диффузного
Таким образом, интенсивность грани складывается из трех составляющих: рассеянного света, диффузного
МАТЕРИАЛЫ
Материалы – это совокупность настроек, определяющих внешний вид материала.
Параметры материала
МАТЕРИАЛЫ
Материалы – это совокупность настроек, определяющих внешний вид материала.
Параметры материала
ОСНОВНЫЕ СВОЙСТВА МАТЕРИАЛОВ:
Цвет (рассеянный, диффузный, зеркальный)
Непрозрачность и прозрачность
Отражение – имитация отражения
ОСНОВНЫЕ СВОЙСТВА МАТЕРИАЛОВ:
Цвет (рассеянный, диффузный, зеркальный)
Непрозрачность и прозрачность
Отражение – имитация отражения
Текстурные карты – это растровые изображения (в формате jpeg, gif и
Текстурные карты – это растровые изображения (в формате jpeg, gif и
Технология композитных текстур:
Используются две текстуры: базовая и детальная.
Базовая текстура содержит
Технология композитных текстур:
Используются две текстуры: базовая и детальная.
Базовая текстура содержит
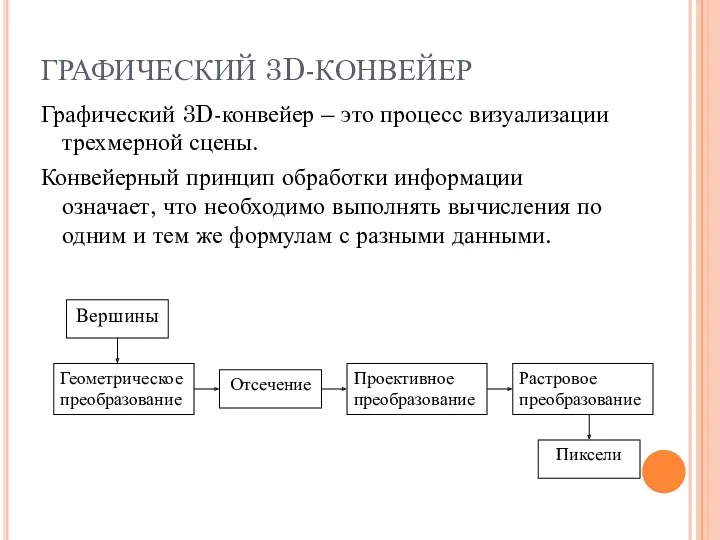
ГРАФИЧЕСКИЙ 3D-КОНВЕЙЕР
Графический 3D-конвейер – это процесс визуализации трехмерной сцены.
Конвейерный принцип обработки
ГРАФИЧЕСКИЙ 3D-КОНВЕЙЕР
Графический 3D-конвейер – это процесс визуализации трехмерной сцены.
Конвейерный принцип обработки

ЭТАПЫ ГРАФИЧЕСКОГО 3D-КОНВЕЙЕРА
Геометрические преобразования
Внутреннее представление геометрических объектов должно быть преобразовано на
ЭТАПЫ ГРАФИЧЕСКОГО 3D-КОНВЕЙЕРА
Геометрические преобразования
Внутреннее представление геометрических объектов должно быть преобразовано на
ЭТАПЫ ГРАФИЧЕСКОГО 3D-КОНВЕЙЕРА
Отсечение
Вторая важная операция в графическом конвейере – отсечение (clipping)
ЭТАПЫ ГРАФИЧЕСКОГО 3D-КОНВЕЙЕРА
Отсечение
Вторая важная операция в графическом конвейере – отсечение (clipping)

ЭТАПА ГРАФИЧЕСКОГО 3D-КОНВЕЙЕРА
Проективное преобразование
Существует множество видов проективного преобразования, некоторые из которых
ЭТАПА ГРАФИЧЕСКОГО 3D-КОНВЕЙЕРА
Проективное преобразование
Существует множество видов проективного преобразования, некоторые из которых
ЭТАПЫ ГРАФИЧЕСКОГО 3D-КОНВЕЙЕРА
Растровое преобразование
Преобразование описания двухмерных объектов в коды засветки пикселей
ЭТАПЫ ГРАФИЧЕСКОГО 3D-КОНВЕЙЕРА
Растровое преобразование
Преобразование описания двухмерных объектов в коды засветки пикселей
КАРТИННАЯ ПЛОСКОСТЬ
Камеры задают четыре типа параметров, однозначно определяющих характеристики создаваемого ею
КАРТИННАЯ ПЛОСКОСТЬ
Камеры задают четыре типа параметров, однозначно определяющих характеристики создаваемого ею
КАРТИННАЯ ПЛОСКОСТЬ
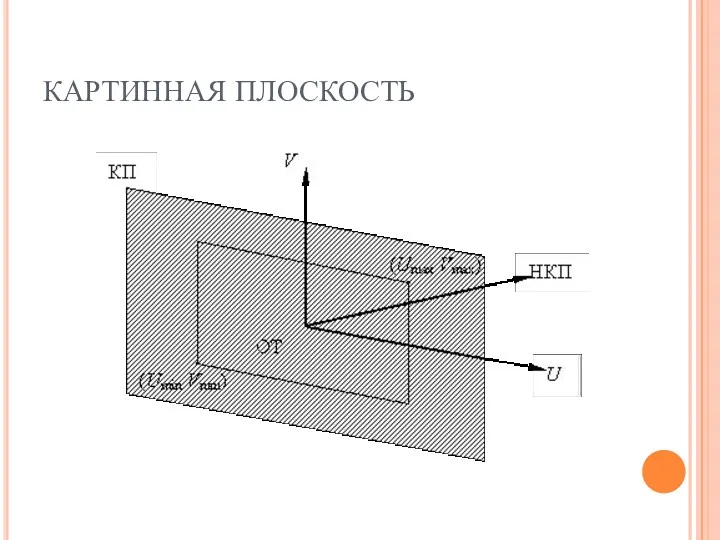
Положение камеры (картинной плоскости) определяется некоторой точкой на плоскости, которую
КАРТИННАЯ ПЛОСКОСТЬ
Положение камеры (картинной плоскости) определяется некоторой точкой на плоскости, которую
КАРТИННАЯ ПЛОСКОСТЬ
КАРТИННАЯ ПЛОСКОСТЬ
ПРОЕКЦИЙ
В общем случае проекции преобразуют точки, заданные в системе координат размерностью
ПРОЕКЦИЙ
В общем случае проекции преобразуют точки, заданные в системе координат размерностью
ПРОЕКЦИЙ
Определенный таким образом класс проекций существует под названием плоских геометрических проекций,
ПРОЕКЦИЙ
Определенный таким образом класс проекций существует под названием плоских геометрических проекций,
ПРОЕКЦИЙ
ПРОЕКЦИЙ
ВИДИМЫЙ ОБЪЕМ РАЗЛИЧНЫХ ПРОЕКЦИЙ
В случае центральной проекции видимый объем определяется центром.
ВИДИМЫЙ ОБЪЕМ РАЗЛИЧНЫХ ПРОЕКЦИЙ
В случае центральной проекции видимый объем определяется центром.
ВИДИМЫЙ ОБЪЕМ РАЗЛИЧНЫХ ПРОЕКЦИЙ
В случае параллельных проекций видимый объем определяется направлением
ВИДИМЫЙ ОБЪЕМ РАЗЛИЧНЫХ ПРОЕКЦИЙ
В случае параллельных проекций видимый объем определяется направлением
ВИДИМЫЙ ОБЪЕМ РАЗЛИЧНЫХ ПРОЕКЦИЙ
В общем случае направление проецирования может не совпадать
ВИДИМЫЙ ОБЪЕМ РАЗЛИЧНЫХ ПРОЕКЦИЙ
В общем случае направление проецирования может не совпадать
ВИДИМЫЙ ОБЪЕМ РАЗЛИЧНЫХ ПРОЕКЦИЙ
Центральная проекция
ВИДИМЫЙ ОБЪЕМ РАЗЛИЧНЫХ ПРОЕКЦИЙ
Центральная проекция
ВИДИМЫЙ ОБЪЕМ РАЗЛИЧНЫХ ПРОЕКЦИЙ
Ортографическая параллельная проекция
ВИДИМЫЙ ОБЪЕМ РАЗЛИЧНЫХ ПРОЕКЦИЙ
Ортографическая параллельная проекция
ВИДИМЫЙ ОБЪЕМ РАЗЛИЧНЫХ ПРОЕКЦИЙ
Косоугольная параллельная проекция
ВИДИМЫЙ ОБЪЕМ РАЗЛИЧНЫХ ПРОЕКЦИЙ
Косоугольная параллельная проекция
БУФЕР ГЛУБИНЫ
Для адекватной визуализации трехмерных объектов в графических библиотеках предусмотрен так
БУФЕР ГЛУБИНЫ
Для адекватной визуализации трехмерных объектов в графических библиотеках предусмотрен так
ПРИНЦИП РАБОТЫ БУФЕРА ГЛУБИНЫ
В начале в z-буфер заносятся (очищается) максимально возможные
ПРИНЦИП РАБОТЫ БУФЕРА ГЛУБИНЫ
В начале в z-буфер заносятся (очищается) максимально возможные
ПРОГРАММЫ ТРЕХМЕРНОЙ ГРАФИКИ
3D Studio MAX
Corel Bryce
Adobe Dimension
LightWave 3D
Maya
Poser
ПРОГРАММЫ ТРЕХМЕРНОЙ ГРАФИКИ
3D Studio MAX
Corel Bryce
Adobe Dimension
LightWave 3D
Maya
Poser
 Сравнительный анализ дизайна интернет-сайтов
Сравнительный анализ дизайна интернет-сайтов Облачные технологии
Облачные технологии Создание фильма в видеоредакторе Windows Movie Maker
Создание фильма в видеоредакторе Windows Movie Maker Основы языка Object Pascal/Delphi
Основы языка Object Pascal/Delphi Теория формальных языков и трансляций
Теория формальных языков и трансляций Spanning Tree Protocol (STP) ( протокол покрывающего дерева)
Spanning Tree Protocol (STP) ( протокол покрывающего дерева) Global Regulatory Reporting
Global Regulatory Reporting Устройство компьютера. Самый умный по информатике
Устройство компьютера. Самый умный по информатике Глобальная компьютерная сеть Интернет
Глобальная компьютерная сеть Интернет Решение квадратного уравнения: алгоритм и программа
Решение квадратного уравнения: алгоритм и программа Programming Declarant's Assistant
Programming Declarant's Assistant Сетевые модели с вероятностной оценкой продолжительности работ
Сетевые модели с вероятностной оценкой продолжительности работ Типология журналистики. Журналистика, как система средств массовой информации
Типология журналистики. Журналистика, как система средств массовой информации Сетевое оборудование
Сетевое оборудование Регистрация на сайте 1-9-90.com
Регистрация на сайте 1-9-90.com Мектепке дейінгі мекемедегі Логопед жұмысында компьютерлік технологияларды қолдану
Мектепке дейінгі мекемедегі Логопед жұмысында компьютерлік технологияларды қолдану Презентация. Простые типы данных
Презентация. Простые типы данных Робота з файлами. Текстові файли. Лекция 17
Робота з файлами. Текстові файли. Лекция 17 Windows 10
Windows 10 BHP. Grafika komputerowa
BHP. Grafika komputerowa Аспектно ориентированное программирование в PHP
Аспектно ориентированное программирование в PHP Электронная почта
Электронная почта Организация вычислений в электронных таблицах. Обработка числовой информации в электронных таблицах. Информатика. 9 класс
Организация вычислений в электронных таблицах. Обработка числовой информации в электронных таблицах. Информатика. 9 класс Ajax. Идея заложенная в Аjax
Ajax. Идея заложенная в Аjax Сетевое и системное администрирование
Сетевое и системное администрирование Отримання ключа електронного цифрового підпису
Отримання ключа електронного цифрового підпису Кроссбраузерность
Кроссбраузерность Training Module Overview
Training Module Overview