- Введение: Системы распознавания образов

Содержание
- 2. темы
- 3. Лабораторные работы
- 4. Оценка Лабы (50%) РК (20%) Тесты на лекциях(20%) Посещение(10%)
- 5. Тема 1. Введение План: Область применения, задачи, история развития и основные идеи и практика распознавания образов.
- 6. Примеры Чтение книги Собака узнает хозяина или другую собаку Росянка опознает муху Замок и ключ :-)
- 7. Определение Распознавание образов – это научная дисциплина, целью которой является разделение объектов по нескольким категориям или
- 8. Основная ИДЕЯ Разделение основывается на прецедентах. Прецедент – это образ, правильное отнесение к категории которого известно.
- 9. История Нейрофизиология и психология конец 19 века, начало 20-го века (Павлов - собака) Р.Фишер – дискриминантный
- 10. Фигуры В.М.Глушков, В.С.Михалевич, В.С.Пугачев, НП.Бусленко, Ю.И.Журавлев, Я.З.Цыпкин, А.Г.Ивахненко, М.А.Айзерман, Э.М.Браверман, М.М.Бонгард, В.Н.Вапник, Г.П.Тартаковский, В.Г.Репин, Л.А.Растригин, А.Л.Горелик
- 11. Основные цели разработки систем распознавания Освобождение человека от однообразных рутинных операций для решения других более важных
- 12. Великая ЦЕЛЬ Создать искусственную систему, которая сама решит любую задачу эффективно Случай 1: Случай 2: Чайник
- 13. Образ не объект Описание не полностью представляет объект Описание зависит от задач Описание содержит погрешности представления
- 14. Образ не объект Совокупность признаков, относящихся к одному образу, называется вектором признаков. Вектора признаков принимают значения
- 15. Класс классы - это объединения объектов (явлений), отличающиеся общими свойствами, интересующими человека. цель распознавания – принятие
- 16. Классификация Систем распознавания Однородность: -простые; -сложные Способ получения апостериорной информации -одноуровневые; -многоуровневые. Количество первоначальной априорной информации
- 17. Схема системы распознавания
- 18. Этапы формирования системы распознавания Генерация признаков – выявление признаков, которые наиболее полно описывают объект. Селекция признаков
- 19. Основные задачи при построении систем распознавания образов Построение признаков Селекция признаков Подавление помех Преобразование признаков Отнесение
- 20. литература Методы современной и классической теории управления. Т5. - 2004 Математические методы распознавания образов. Курс лекций.
- 21. Тема 2. Задача распознавания образов как выделение характерных признаков План: Общая задача классификации. Классы. Описания классов
- 22. Задача классификации (что делает) Разделить объекты на 2 группы и сказать к какой из них относиться
- 23. Задача классификации (по существу) Разбиение пространства признаков на области по одной для каждого класса Дуда Р.,
- 24. Гипотеза компактности Классическая. Реализация одного и того же образа, обычно, отображается признаком пространства геометрически близкими точками.
- 25. Рабочие утверждения Необработанное представление информации увеличивает ошибку обобщения нейронной сети и время на ее обучение. Состав
- 26. Проблема Необходимо отобрать интересные составляющие описания объекта – селекция :А КАК? Необходимо определить правильное преобразование описания
- 27. Описание классов по примерами по признакам (эталоны) Столы для работы Столы для обеда
- 28. Описание классов структурами Столы для работы Столы для обеда столешница Боковая опора Боковая опора Ящики столешница
- 29. Описания классов вероятностное Ширина стола , м 0 0.5 1 1.5 2 Р(класс i) Рабочий стол
- 30. Логическое описание образа Обеденный стол содержит несколько( не менее 1) ножки и немного ящиков (не более
- 31. Расстояния между объектами – object distance Метрики : Минковский (упорядоченные признаки) Меры: Хемминг (номинальные признаки) Число
- 32. Датчик Преобразование внешнего мира в цифровое описание доступное компьютерной обработке Аналогво-Цифровое Преобразование – АЦП – Digitizer
- 33. Получение пиксельного изображения Спроецированное изображение непрерывное, с гладкими границами На матрице оно дискретизируется По пространству (пиксельная
- 34. Типы изображений Рисунок Фотография Оптическое электронное
- 35. Глубина цвета - Depth of color Квантование цвета Число разрядов для представления цвета 1- бинарный 8-полноцветный
- 36. Чувствительность человека
- 37. color model - RGB
- 38. RGB R G B
- 39. Вопрос Представить функцию в цифровой форме на отрезке [-π, π] с интервалом дискретизации π/4, с 3-мя
- 41. Скачать презентацию

темы
темы
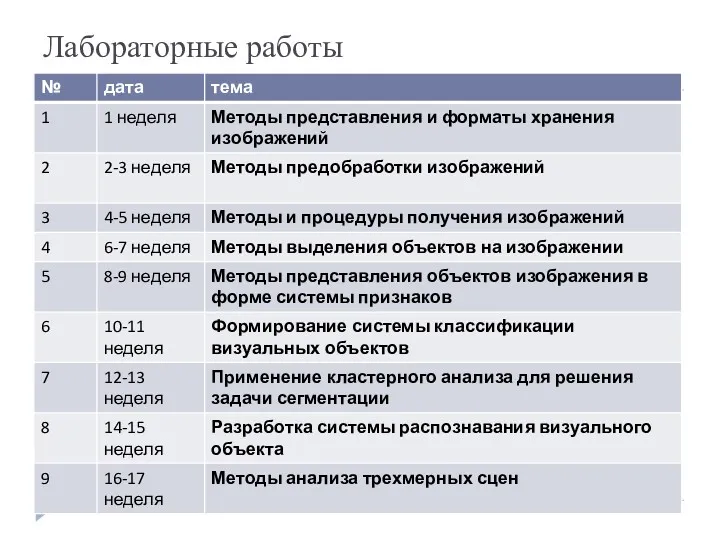
Лабораторные работы
Лабораторные работы
Оценка
Лабы (50%)
РК (20%)
Тесты на лекциях(20%)
Посещение(10%)
Оценка
Лабы (50%)
РК (20%)
Тесты на лекциях(20%)
Посещение(10%)
Тема 1. Введение
План:
Область применения, задачи, история развития и основные идеи и
Тема 1. Введение
План:
Область применения, задачи, история развития и основные идеи и
Примеры
Чтение книги
Собака узнает хозяина или другую собаку
Росянка опознает муху
Замок и ключ
Примеры
Чтение книги
Собака узнает хозяина или другую собаку
Росянка опознает муху
Замок и ключ
Определение
Распознавание образов – это научная дисциплина, целью которой является разделение объектов
Определение
Распознавание образов – это научная дисциплина, целью которой является разделение объектов
Основная ИДЕЯ
Разделение основывается на прецедентах.
Прецедент – это образ, правильное отнесение
Основная ИДЕЯ
Разделение основывается на прецедентах.
Прецедент – это образ, правильное отнесение
История
Нейрофизиология и психология конец 19 века, начало 20-го века (Павлов -
История
Нейрофизиология и психология конец 19 века, начало 20-го века (Павлов -
Фигуры
В.М.Глушков,
В.С.Михалевич,
В.С.Пугачев,
НП.Бусленко,
Ю.И.Журавлев,
Я.З.Цыпкин,
А.Г.Ивахненко,
М.А.Айзерман,
Э.М.Браверман,
М.М.Бонгард,
В.Н.Вапник,
Г.П.Тартаковский,
Фигуры
В.М.Глушков,
В.С.Михалевич,
В.С.Пугачев,
НП.Бусленко,
Ю.И.Журавлев,
Я.З.Цыпкин,
А.Г.Ивахненко,
М.А.Айзерман,
Э.М.Браверман,
М.М.Бонгард,
В.Н.Вапник,
Г.П.Тартаковский,
Основные цели разработки систем распознавания
Освобождение человека от однообразных рутинных операций для
Основные цели разработки систем распознавания
Освобождение человека от однообразных рутинных операций для
Великая ЦЕЛЬ
Создать искусственную систему, которая сама решит любую задачу эффективно
Случай 1: Случай
Великая ЦЕЛЬ
Создать искусственную систему, которая сама решит любую задачу эффективно
Случай 1: Случай
Образ не объект
Описание не полностью представляет объект
Описание зависит от задач
Описание содержит
Образ не объект
Описание не полностью представляет объект
Описание зависит от задач
Описание содержит
Образ не объект
Совокупность признаков, относящихся к одному образу, называется вектором признаков.
Вектора
Образ не объект
Совокупность признаков, относящихся к одному образу, называется вектором признаков.
Вектора
Класс
классы - это объединения объектов (явлений), отличающиеся общими свойствами, интересующими
Класс
классы - это объединения объектов (явлений), отличающиеся общими свойствами, интересующими
Классификация Систем распознавания
Однородность:
-простые;
-сложные
Способ получения апостериорной информации
-одноуровневые;
-многоуровневые.
Количество первоначальной априорной информации
Без
Классификация Систем распознавания
Однородность:
-простые;
-сложные
Способ получения апостериорной информации
-одноуровневые;
-многоуровневые.
Количество первоначальной априорной информации
Без

Схема системы распознавания
Схема системы распознавания
Этапы формирования системы распознавания
Генерация признаков – выявление признаков, которые наиболее полно
Этапы формирования системы распознавания
Генерация признаков – выявление признаков, которые наиболее полно
Основные задачи при построении систем распознавания образов
Построение признаков
Селекция признаков
Подавление помех
Преобразование признаков
Отнесение
Основные задачи при построении систем распознавания образов
Построение признаков
Селекция признаков
Подавление помех
Преобразование признаков
Отнесение
литература
Методы современной и классической теории управления. Т5. - 2004
Математические методы
литература
Методы современной и классической теории управления. Т5. - 2004
Математические методы
Тема 2. Задача распознавания образов как выделение характерных признаков
План:
Общая задача
Тема 2. Задача распознавания образов как выделение характерных признаков
План:
Общая задача

Задача классификации (что делает)
Разделить объекты на 2 группы и сказать к
Задача классификации (что делает)
Разделить объекты на 2 группы и сказать к

Задача классификации (по существу)
Разбиение пространства признаков на области по одной для
Задача классификации (по существу)
Разбиение пространства признаков на области по одной для
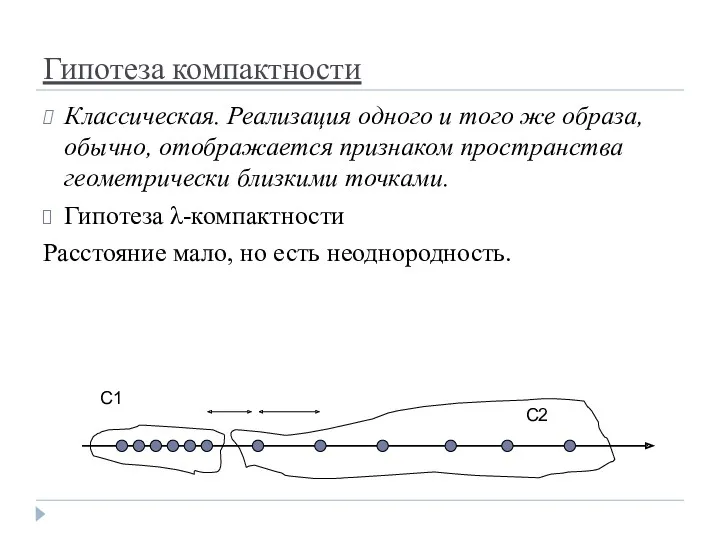
Гипотеза компактности
Классическая. Реализация одного и того же образа, обычно, отображается признаком
Гипотеза компактности
Классическая. Реализация одного и того же образа, обычно, отображается признаком
Рабочие утверждения
Необработанное представление информации увеличивает ошибку обобщения нейронной сети и время
Рабочие утверждения
Необработанное представление информации увеличивает ошибку обобщения нейронной сети и время
Проблема
Необходимо отобрать интересные составляющие описания объекта – селекция :А КАК?
Необходимо определить
Проблема
Необходимо отобрать интересные составляющие описания объекта – селекция :А КАК?
Необходимо определить
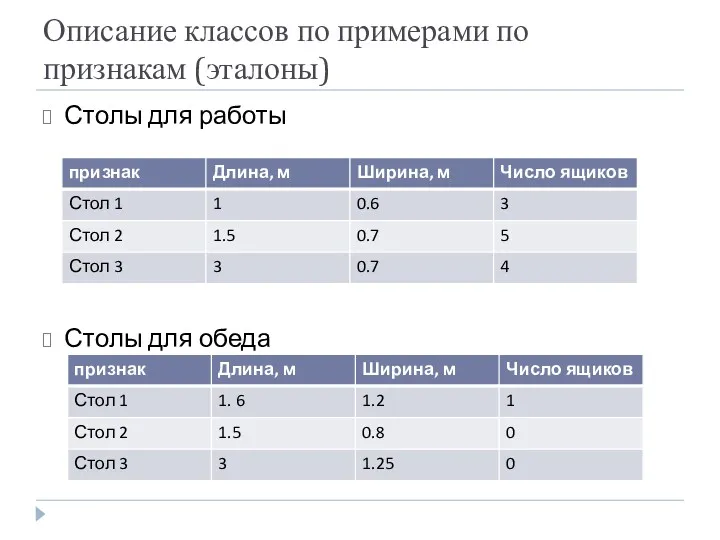
Описание классов по примерами по признакам (эталоны)
Столы для работы
Столы для обеда
Описание классов по примерами по признакам (эталоны)
Столы для работы
Столы для обеда
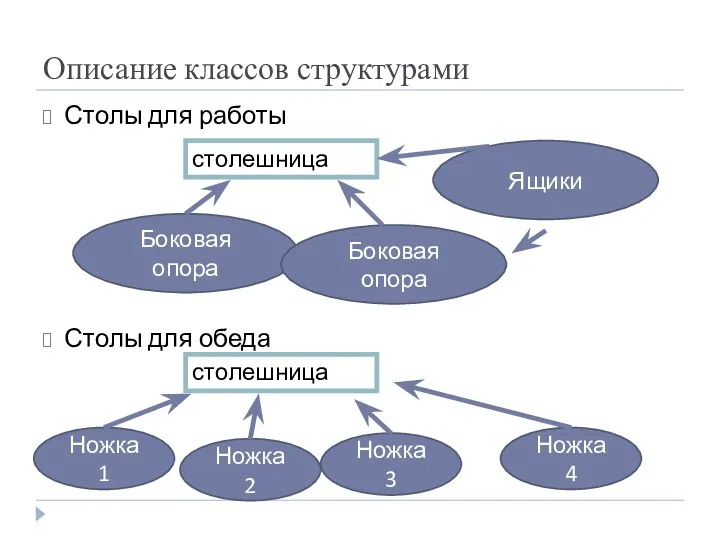
Описание классов структурами
Столы для работы
Столы для обеда
столешница
Боковая опора
Боковая опора
Ящики
столешница
Ножка 1
Ножка 2
Ножка
Описание классов структурами
Столы для работы
Столы для обеда
столешница
Боковая опора
Боковая опора
Ящики
столешница
Ножка 1
Ножка 2
Ножка

Описания классов вероятностное
Ширина стола , м
0 0.5 1 1.5 2
Р(класс i)
Рабочий стол
обеденный стол
Описания классов вероятностное
Ширина стола , м
0 0.5 1 1.5 2
Р(класс i)
Рабочий стол
обеденный стол
Логическое описание образа
Обеденный стол содержит несколько( не менее 1) ножки и
Логическое описание образа
Обеденный стол содержит несколько( не менее 1) ножки и
Расстояния между объектами – object distance
Метрики : Минковский (упорядоченные признаки)
Меры: Хемминг
Расстояния между объектами – object distance
Метрики : Минковский (упорядоченные признаки)
Меры: Хемминг
Датчик
Преобразование внешнего мира в цифровое описание доступное компьютерной обработке
Аналогво-Цифровое Преобразование –
Датчик
Преобразование внешнего мира в цифровое описание доступное компьютерной обработке
Аналогво-Цифровое Преобразование –
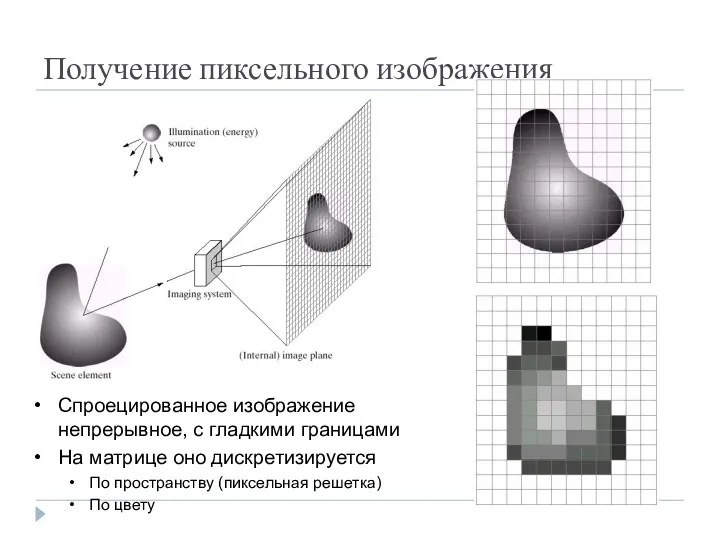
Получение пиксельного изображения
Спроецированное изображение непрерывное, с гладкими границами
На матрице оно дискретизируется
По
Получение пиксельного изображения
Спроецированное изображение непрерывное, с гладкими границами
На матрице оно дискретизируется
По
Типы изображений
Рисунок
Фотография
Оптическое
электронное
Типы изображений
Рисунок
Фотография
Оптическое
электронное
Глубина цвета - Depth of color
Квантование цвета
Число разрядов для представления цвета
1-
Глубина цвета - Depth of color
Квантование цвета
Число разрядов для представления цвета
1-
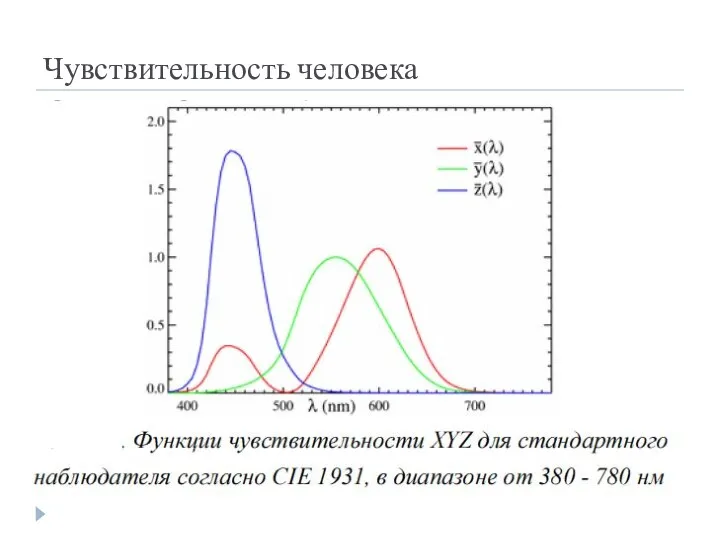
Чувствительность человека
Чувствительность человека
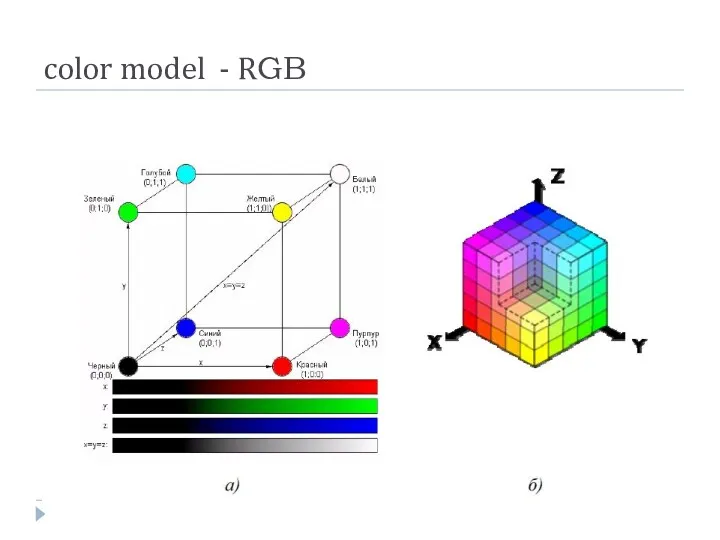
color model - RGB
color model - RGB
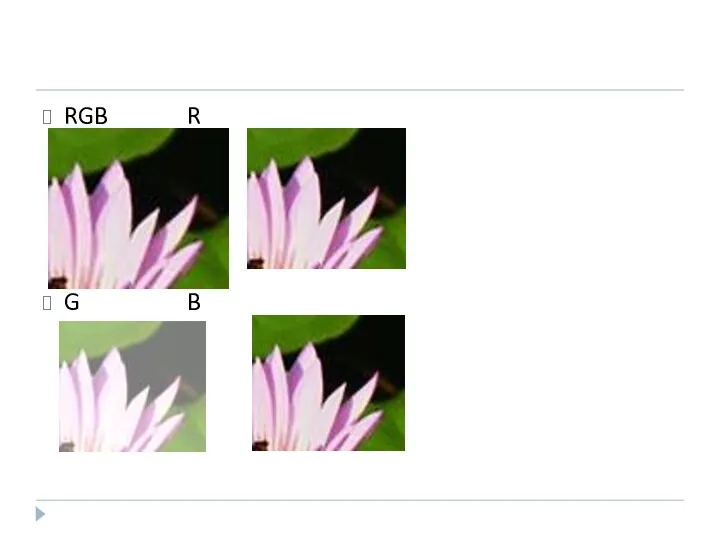
RGB R
G B
RGB R
G B
![Вопрос Представить функцию в цифровой форме на отрезке [-π, π]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/228836/slide-38.jpg)
Вопрос
Представить функцию в цифровой форме на отрезке [-π, π] с интервалом
Вопрос
Представить функцию в цифровой форме на отрезке [-π, π] с интервалом
 5_C__Dinamicheskie_struktury_dannykh (1)
5_C__Dinamicheskie_struktury_dannykh (1) ЕАС ОПС Реализация лотерейных билетов и выплата выигрышей
ЕАС ОПС Реализация лотерейных билетов и выплата выигрышей MATLAB ортасында матрицалармен жұмыс
MATLAB ортасында матрицалармен жұмыс Правила безпечної роботи в Інтернеті
Правила безпечної роботи в Інтернеті Веб-сайт для создания блогов
Веб-сайт для создания блогов Организация поиска патентной и непатентной информации
Организация поиска патентной и непатентной информации История создания и развития ПК
История создания и развития ПК Рекомендации по использованию электронных ресурсов при аттестации с целью установления высшей квалификационных категорий
Рекомендации по использованию электронных ресурсов при аттестации с целью установления высшей квалификационных категорий Анимация Power Point
Анимация Power Point Онтологии. RDF
Онтологии. RDF Автоматизированные системы специального назначения. Методы и средства защиты информации от НСД в ОС СН
Автоматизированные системы специального назначения. Методы и средства защиты информации от НСД в ОС СН Интенсив-курс по React JS. Занятие 5. Redux
Интенсив-курс по React JS. Занятие 5. Redux Реляционная база данных. Bigdata. Основные понятия базы данных
Реляционная база данных. Bigdata. Основные понятия базы данных Теория и средства передачи данных (Модуль 4. Сетевые технологии)
Теория и средства передачи данных (Модуль 4. Сетевые технологии) Курсы по тестированию IT LABS. UNIX. Основные команды. Man. (Урок 6)
Курсы по тестированию IT LABS. UNIX. Основные команды. Man. (Урок 6) Определение количества информации. Емкость знака
Определение количества информации. Емкость знака Медіавіконце: Вікіпедія і вікіпедисти
Медіавіконце: Вікіпедія і вікіпедисти Введение в структурированный язык запросов
Введение в структурированный язык запросов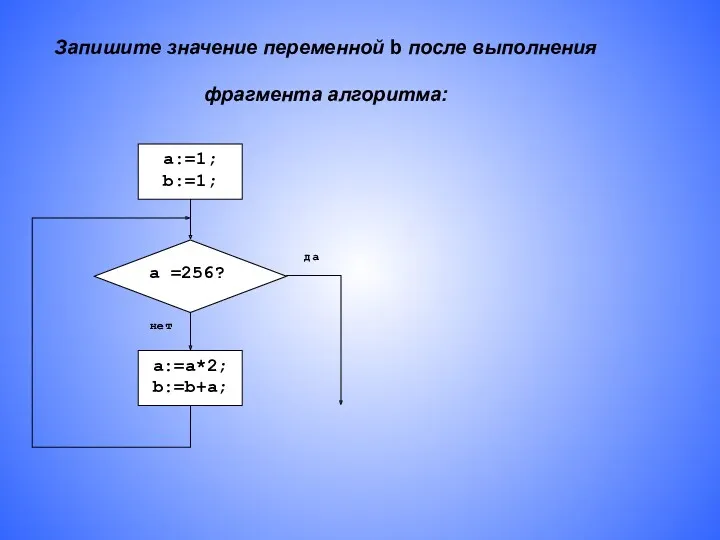 Значение переменной b после выполнения фрагмента алгоритма
Значение переменной b после выполнения фрагмента алгоритма Огляд введення та виведення в С++
Огляд введення та виведення в С++ Объекты и их имена. Признаки объектов.
Объекты и их имена. Признаки объектов. СМИ. Газета. Журналы. Радио. Телевидение. Интернет
СМИ. Газета. Журналы. Радио. Телевидение. Интернет Создание сайта. Роль дизайна web-сайта в формировании бренда
Создание сайта. Роль дизайна web-сайта в формировании бренда Ontologies and the Semantik Web
Ontologies and the Semantik Web Медиа-карта сайтов Красноярского края
Медиа-карта сайтов Красноярского края Отчёт по SMM. Кинотеатр Сатурн IMAX: январь 2020
Отчёт по SMM. Кинотеатр Сатурн IMAX: январь 2020 Элементы алгебры логики. Математические основы информатики
Элементы алгебры логики. Математические основы информатики Использование ИКТ на уроках истории и обществознания как средство повышения качества знаний учащихся
Использование ИКТ на уроках истории и обществознания как средство повышения качества знаний учащихся