- Геометрические основы компьютерной графики

Содержание
- 2. Система координат (СК) Для перехода от зрительных геометрических образов к математическому описанию формы объектов и их
- 3. Системы координат Введение системы координат сводится к установлению способа сопоставления каждой точке пространства набора вещественных чисел
- 4. Размерность пространства Число координат в таком наборе определяется размерность пространства Обычно рассматривают двумерные (2D) пространства на
- 5. Геометрия на плоскости В 2D-пространствах графическими элементами являются точки и линии, в 3D-пространствах к ним добавляются
- 6. Декартовы и полярные координаты Координаты (x,y) и (r,ϕ) в этих системах связаны соотношениями: * Геометрические основы
- 7. Точки и линии на плоскости Введем обозначение для точки на плоскости: p = (x, y) ≡
- 8. Координатная и векторная формы Эти соотношения могут быть записаны в координатной или в векторной форме Векторная
- 9. Расстояние d между двумя точками и в декартовых координат выражается формулой: В полярных координатах это расстояние
- 10. Способы описания линии Уравнение линии в неявной форме имеет вид: Параметрическая функция для линии: * Геометрические
- 11. Уравнение прямой Для прямой линии неявное уравнение имеет вид: где коэффициенты A и B одновременно не
- 12. Уравнение прямой В этом случае неявное уравнение прямой записывается в нормальной форме: Для задания прямой вместо
- 13. Параметрическая функция прямой В этом случае для описания прямой удобно использовать параметрическую функцию, которая имеет вид:
- 14. Связь нормали и направляющего вектора Из условия ортогональности векторов N и V следует, что Компоненты нормали
- 15. Отрезки и лучи Параметрическая функция удобна для построения частей прямой – отрезков и лучей (-∞ (
- 16. Линеаризация кривой Для произвольной линии на плоскости в любой регулярной (гладкой и некратной) точке возможна линеаризация,
- 17. Уравнение касательной Уравнение касательной удобно записать в нормальной форме c компонентами вектора нормали вычисленными как частные
- 18. Неявное уравнение касательной Такое уравнение имеет вид: Вектор нормали ортогонален касательной и направлен в ту сторону,
- 19. Параметрическая функция касательной Для линии, заданной параметрически, можно построить параметрическую функцию касательной с компонентами направляющего вектора:
- 20. Способы описания кривых Выбор между описанием линии с помощью уравнения или с помощью параметрических функций определяется
- 21. Способы описания кривых Анализ свойств кривых и вычисление координат точек их пересечения удобно проводить с использованием
- 22. Параметрические кривые Такие кривые называются параметрическими Примеры параметрических кривых: фигуры Лиссажу x = cos(wx*t+wx0), y =
- 23. Параметрические кривые спираль Бернулли x = r0*exp(r1*t) * cos(wx*t+wx0), y = r0*exp(r1*t) * sin(wy*t+wy0); параболическая спираль
- 24. Параметрические кривые циклоида x = r0*exp(r1*t) * cos(wx*t+wx0), y = r0*exp(r1*t) * sin(wy*t+wy0); улитка Паскаля x=(r0*cos(t)+r1)
- 25. Параметрические кривые трисектрисса x = (r0*cos(t)-r1/cos(t)) * cos(wx*t+wx0), y = (r0*cos(t)-r1/cos(t)) * sin(wy*t+wy0); * Геометрические основы
- 26. АФФИННЫЕ ПРЕОБРАЗОВАНИЯ * Геометрические основы
- 27. СК в компьютерной графике В компьютерной графике используются три системы координат: неподвижная мировая система координат (МСК);
- 28. МСК и OСК в 2D-пространстве X Y X’ Y’ * Геометрические основы
- 29. Сцена Сценой называется система объектов, изображение которой должно быть воспроизведено средствами компьютерной графики Сцена является ограниченной
- 30. Координаты точки в МСК и ОСК Пусть некоторой точке P сцены в МСК соответствуют координаты (x,y),
- 31. Обратное преобразование Обратное преобразование имеет вид: В общем случае, переход от МСК к ОСК включает в
- 32. Интерпретация преобразований Эти преобразования можно интерпретировать двояко: как изменение координат некоторой фиксированной точки сцены при изменении
- 33. Интерпретация преобразований В первом случае говорят об изменении координат данной точки сцены Во втором случае –
- 34. Аффинное преобразование В любом случае это отображение является линейным и может быть обобщено следующим образом: *
- 35. Условие обратимости Для обеспечения обратимости аффинного преобразования его коэффициенты должны быть связаны соотношением: * Геометрические основы
- 36. Базовые преобразования Теорема. Любое аффинное преобразование можно представить как суперпозицию поворота, растяжения, отражения и переноса Перечисленные
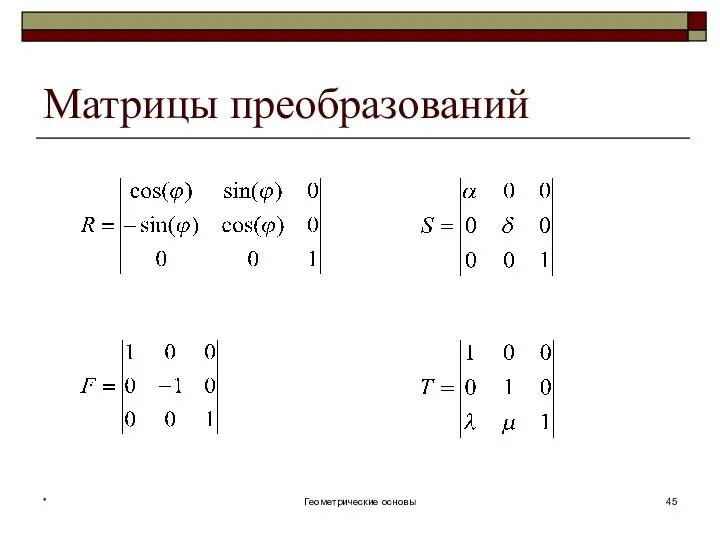
- 37. Преобразование поворота Имеет вид Задается матрицей * Геометрические основы
- 38. Преобразование растяжения Имеет вид Задается матрицей * Геометрические основы
- 39. Преобразование отражения Имеет вид (относительно оси абсцисс) Задается матрицей * Геометрические основы
- 40. Преобразование переноса Имеет вид Задается вектором * Геометрические основы
- 41. Общее преобразование Произвольное аффинное преобразование можно представить в виде: где p = [x, y] – векторное
- 42. Однородные координаты Данное преобразование является неоднородным, т.к. преобразование переноса выполняется аддитивно Для обеспечения его однородности вводят
- 43. Однородные координаты Однородными координатами точки p = [x, y] называется такая тройка чисел x1, x2, x3,
- 44. Однородные координаты Обычно полагают x3 = 1, и тогда в однородных координатах вектор точки имеет вид:
- 45. Матрицы преобразований * Геометрические основы
- 47. Скачать презентацию
Система координат (СК)
Для перехода от зрительных геометрических образов к математическому описанию
Система координат (СК)
Для перехода от зрительных геометрических образов к математическому описанию
Системы координат
Введение системы координат сводится к установлению способа сопоставления каждой точке
Системы координат
Введение системы координат сводится к установлению способа сопоставления каждой точке
Размерность пространства
Число координат в таком наборе определяется размерность пространства
Обычно рассматривают
Размерность пространства
Число координат в таком наборе определяется размерность пространства
Обычно рассматривают
Геометрия на плоскости
В 2D-пространствах графическими элементами являются точки и линии, в
Геометрия на плоскости
В 2D-пространствах графическими элементами являются точки и линии, в
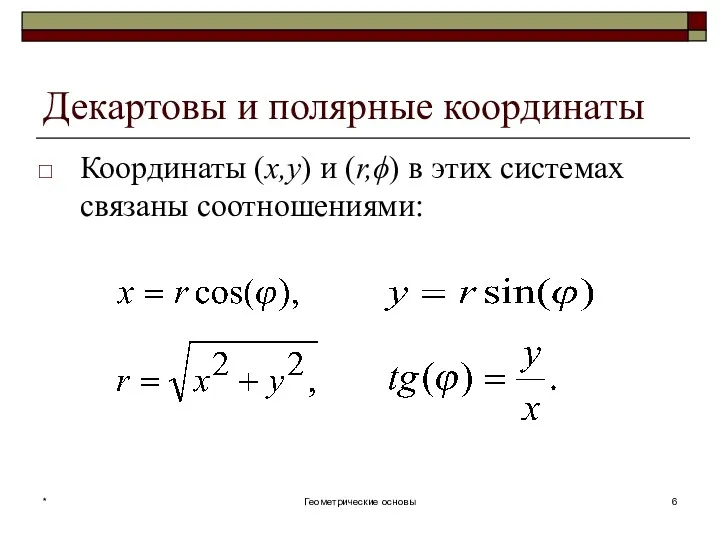
Декартовы и полярные координаты
Координаты (x,y) и (r,ϕ) в этих системах связаны
Декартовы и полярные координаты
Координаты (x,y) и (r,ϕ) в этих системах связаны
Точки и линии на плоскости
Введем обозначение для точки на плоскости:
p =
Точки и линии на плоскости
Введем обозначение для точки на плоскости:
p =
Координатная и векторная формы
Эти соотношения могут быть записаны в координатной или
Координатная и векторная формы
Эти соотношения могут быть записаны в координатной или
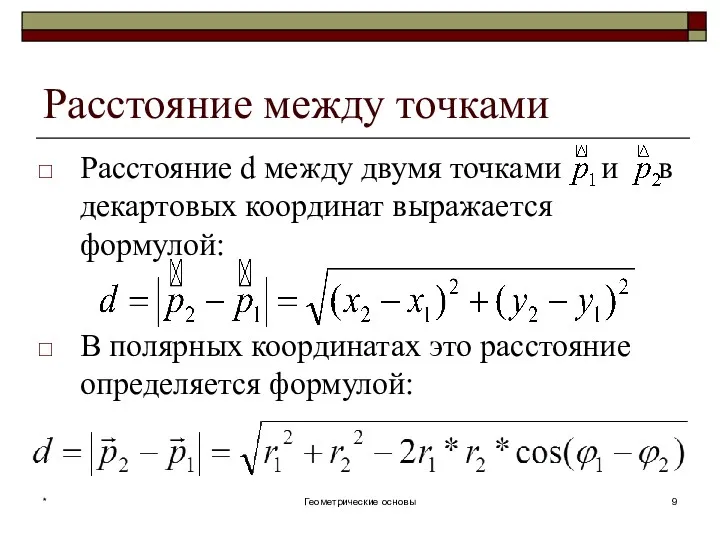
Расстояние d между двумя точками и в декартовых координат выражается формулой:
В
Расстояние d между двумя точками и в декартовых координат выражается формулой:
В
Способы описания линии
Уравнение линии в неявной форме имеет вид:
Параметрическая функция для
Способы описания линии
Уравнение линии в неявной форме имеет вид:
Параметрическая функция для
Уравнение прямой
Для прямой линии неявное уравнение имеет вид:
где коэффициенты A и
Уравнение прямой
Для прямой линии неявное уравнение имеет вид:
где коэффициенты A и
Уравнение прямой
В этом случае неявное уравнение прямой записывается в нормальной форме:
Для
Уравнение прямой
В этом случае неявное уравнение прямой записывается в нормальной форме:
Для
Параметрическая функция прямой
В этом случае для описания прямой удобно использовать параметрическую
Параметрическая функция прямой
В этом случае для описания прямой удобно использовать параметрическую
Связь нормали и направляющего вектора
Из условия ортогональности векторов N и V
Связь нормали и направляющего вектора
Из условия ортогональности векторов N и V
Отрезки и лучи
Параметрическая функция удобна для построения частей прямой – отрезков
Отрезки и лучи
Параметрическая функция удобна для построения частей прямой – отрезков
Линеаризация кривой
Для произвольной линии на плоскости в любой регулярной (гладкой и
Линеаризация кривой
Для произвольной линии на плоскости в любой регулярной (гладкой и
Уравнение касательной
Уравнение касательной удобно записать в нормальной форме c компонентами вектора
Уравнение касательной
Уравнение касательной удобно записать в нормальной форме c компонентами вектора
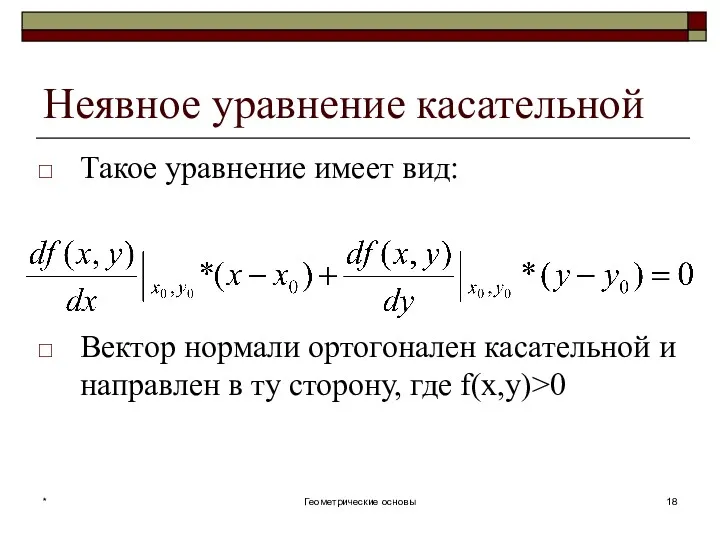
Неявное уравнение касательной
Такое уравнение имеет вид:
Вектор нормали ортогонален касательной и направлен
Неявное уравнение касательной
Такое уравнение имеет вид:
Вектор нормали ортогонален касательной и направлен
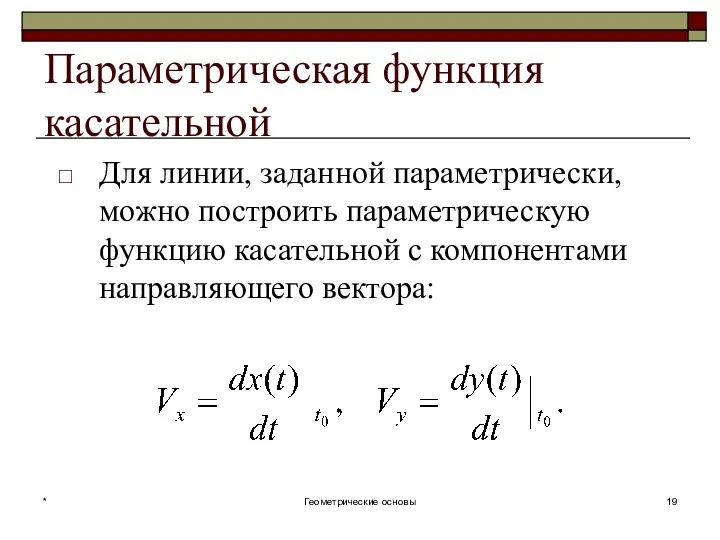
Параметрическая функция касательной
Для линии, заданной параметрически, можно построить параметрическую функцию касательной
Параметрическая функция касательной
Для линии, заданной параметрически, можно построить параметрическую функцию касательной
Способы описания кривых
Выбор между описанием линии с помощью уравнения или с
Способы описания кривых
Выбор между описанием линии с помощью уравнения или с
Способы описания кривых
Анализ свойств кривых и вычисление координат точек их пересечения
Способы описания кривых
Анализ свойств кривых и вычисление координат точек их пересечения
Параметрические кривые
Такие кривые называются параметрическими
Примеры параметрических кривых:
фигуры Лиссажу
x = cos(wx*t+wx0),
Параметрические кривые
Такие кривые называются параметрическими
Примеры параметрических кривых:
фигуры Лиссажу
x = cos(wx*t+wx0),
Параметрические кривые
спираль Бернулли
x = r0*exp(r1*t) * cos(wx*t+wx0),
y = r0*exp(r1*t)
Параметрические кривые
спираль Бернулли
x = r0*exp(r1*t) * cos(wx*t+wx0),
y = r0*exp(r1*t)
Параметрические кривые
циклоида
x = r0*exp(r1*t) * cos(wx*t+wx0),
y = r0*exp(r1*t) * sin(wy*t+wy0);
Параметрические кривые
циклоида
x = r0*exp(r1*t) * cos(wx*t+wx0),
y = r0*exp(r1*t) * sin(wy*t+wy0);
Параметрические кривые
трисектрисса
x = (r0*cos(t)-r1/cos(t)) * cos(wx*t+wx0),
y = (r0*cos(t)-r1/cos(t)) *
Параметрические кривые
трисектрисса
x = (r0*cos(t)-r1/cos(t)) * cos(wx*t+wx0),
y = (r0*cos(t)-r1/cos(t)) *
АФФИННЫЕ ПРЕОБРАЗОВАНИЯ
*
Геометрические основы
АФФИННЫЕ ПРЕОБРАЗОВАНИЯ
*
Геометрические основы
СК в компьютерной графике
В компьютерной графике используются три системы координат:
неподвижная мировая
СК в компьютерной графике
В компьютерной графике используются три системы координат:
неподвижная мировая
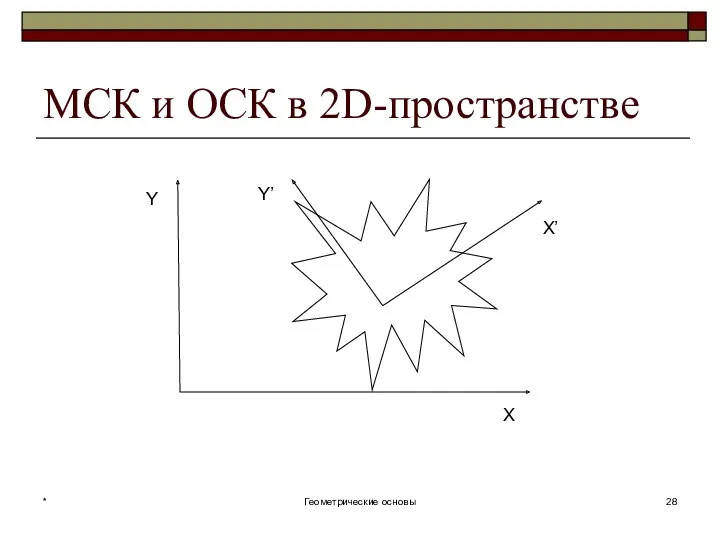
МСК и OСК в 2D-пространстве
X
Y
X’
Y’
*
Геометрические основы
МСК и OСК в 2D-пространстве
X
Y
X’
Y’
*
Геометрические основы
Сцена
Сценой называется система объектов, изображение которой должно быть воспроизведено средствами компьютерной
Сцена
Сценой называется система объектов, изображение которой должно быть воспроизведено средствами компьютерной
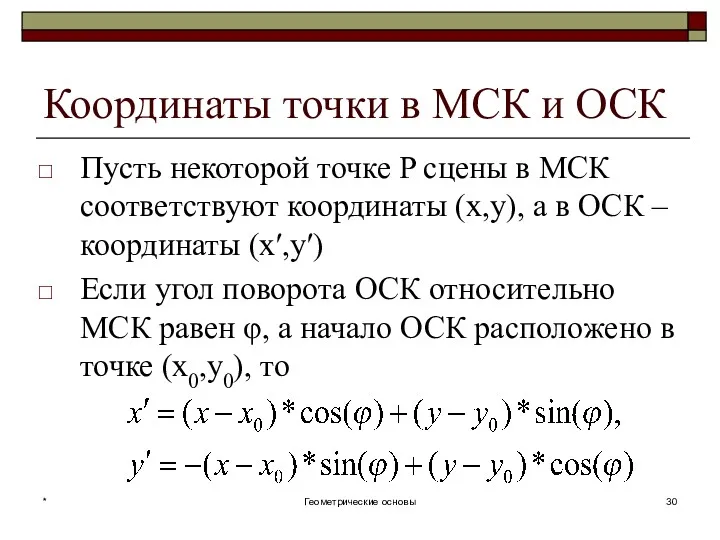
Координаты точки в МСК и ОСК
Пусть некоторой точке P сцены
Координаты точки в МСК и ОСК
Пусть некоторой точке P сцены
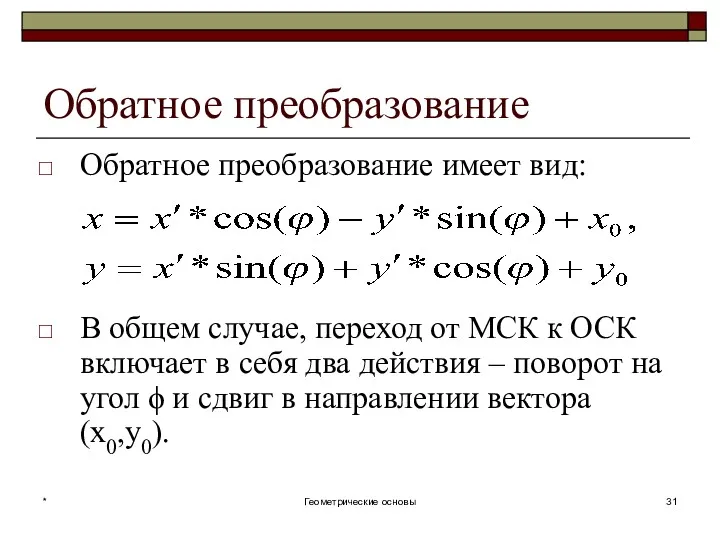
Обратное преобразование
Обратное преобразование имеет вид:
В общем случае, переход от МСК к
Обратное преобразование
Обратное преобразование имеет вид:
В общем случае, переход от МСК к
Интерпретация преобразований
Эти преобразования можно интерпретировать двояко:
как изменение координат некоторой фиксированной точки
Интерпретация преобразований
Эти преобразования можно интерпретировать двояко:
как изменение координат некоторой фиксированной точки
Интерпретация преобразований
В первом случае говорят об изменении координат данной точки сцены
Во
Интерпретация преобразований
В первом случае говорят об изменении координат данной точки сцены
Во
Аффинное преобразование
В любом случае это отображение является линейным и может быть
Аффинное преобразование
В любом случае это отображение является линейным и может быть
Условие обратимости
Для обеспечения обратимости аффинного преобразования его коэффициенты должны быть связаны
Условие обратимости
Для обеспечения обратимости аффинного преобразования его коэффициенты должны быть связаны
Базовые преобразования
Теорема. Любое аффинное преобразование можно представить как суперпозицию поворота, растяжения,
Базовые преобразования
Теорема. Любое аффинное преобразование можно представить как суперпозицию поворота, растяжения,
Преобразование поворота
Имеет вид
Задается матрицей
*
Геометрические основы
Преобразование поворота
Имеет вид
Задается матрицей
*
Геометрические основы
Преобразование растяжения
Имеет вид
Задается матрицей
*
Геометрические основы
Преобразование растяжения
Имеет вид
Задается матрицей
*
Геометрические основы
Преобразование отражения
Имеет вид (относительно оси абсцисс)
Задается матрицей
*
Геометрические основы
Преобразование отражения
Имеет вид (относительно оси абсцисс)
Задается матрицей
*
Геометрические основы
Преобразование переноса
Имеет вид
Задается вектором
*
Геометрические основы
Преобразование переноса
Имеет вид
Задается вектором
*
Геометрические основы
Общее преобразование
Произвольное аффинное преобразование можно представить в виде:
где p = [x,
Общее преобразование
Произвольное аффинное преобразование можно представить в виде:
где p = [x,
Однородные координаты
Данное преобразование является неоднородным, т.к. преобразование переноса выполняется аддитивно
Для обеспечения
Однородные координаты
Данное преобразование является неоднородным, т.к. преобразование переноса выполняется аддитивно
Для обеспечения
![Однородные координаты Однородными координатами точки p = [x, y] называется](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/212074/slide-42.jpg)
Однородные координаты
Однородными координатами точки
p = [x, y] называется такая тройка
Однородные координаты
Однородными координатами точки p = [x, y] называется такая тройка
Однородные координаты
Обычно полагают x3 = 1, и тогда в однородных координатах
Однородные координаты
Обычно полагают x3 = 1, и тогда в однородных координатах
Матрицы преобразований
*
Геометрические основы
Матрицы преобразований
*
Геометрические основы
 Деление с остатком
Деление с остатком Исследование функций и построение графиков. Теоремы Ферма, Ролля, Лагранжа
Исследование функций и построение графиков. Теоремы Ферма, Ролля, Лагранжа Устный счет
Устный счет Пример записи решения задания к Части I РГР №1
Пример записи решения задания к Части I РГР №1 Методы прогнозирования
Методы прогнозирования Интегрирование по частям
Интегрирование по частям Формулы приведения
Формулы приведения Математика и Сказки
Математика и Сказки 20231026_veroyatnost_podborka_zadach
20231026_veroyatnost_podborka_zadach Практикум по решению задачи №20 (базовый уровень)
Практикум по решению задачи №20 (базовый уровень)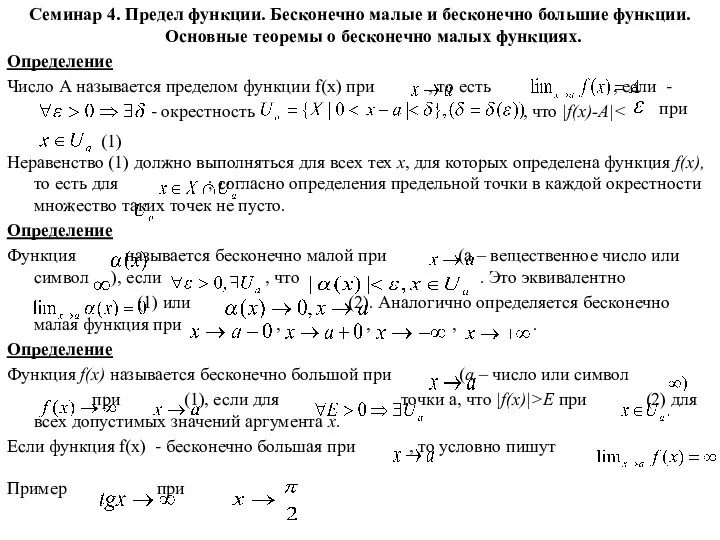 Предел функции. Бесконечно малые и бесконечно большие функции. Теоремы о бесконечно малых функциях. (Семинар 4)
Предел функции. Бесконечно малые и бесконечно большие функции. Теоремы о бесконечно малых функциях. (Семинар 4) Геометрия вокруг нас
Геометрия вокруг нас Статистические характеристики. 8 класс
Статистические характеристики. 8 класс Определители. Вычисление определителей высших порядков. Свойства определителей. Алгебраические дополнения и миноры
Определители. Вычисление определителей высших порядков. Свойства определителей. Алгебраические дополнения и миноры Умножение положительных и отрицательных чисел
Умножение положительных и отрицательных чисел Делимость чисел. Урок №16-19. 6 класс
Делимость чисел. Урок №16-19. 6 класс Элементы теории ошибок измерений. Лекция №6
Элементы теории ошибок измерений. Лекция №6 Построение сечений многогранников
Построение сечений многогранников Интерактивная игра по математике На рыбалке
Интерактивная игра по математике На рыбалке Неделя математики
Неделя математики Теорема Виета. Проблемный урок
Теорема Виета. Проблемный урок Текст задачи, построить чертеж
Текст задачи, построить чертеж Задачи на части. 5 класс
Задачи на части. 5 класс Интерактивная презентация Учим числа. Пишем цифры
Интерактивная презентация Учим числа. Пишем цифры Касательная к окружности
Касательная к окружности Умножение рациональных чисел
Умножение рациональных чисел Математика пәнінен арнайы мектептерге арналған тақырыптық жоспар. Қосу және азайту
Математика пәнінен арнайы мектептерге арналған тақырыптық жоспар. Қосу және азайту Задачи на нахождение неизвестного слагаемого. Тренажёр
Задачи на нахождение неизвестного слагаемого. Тренажёр