- Квантовая механика и квантовая химия. Лекция № 3

Содержание
- 2. Основными характеристиками физической системы в квантовой физике являются наблюдаемые величины и состояния. Наблюдаемым (динамическим) величинам сопоставляются
- 3. Квантовое состояние — любое возможное состояние, в котором может находиться квантовая система. Описывается: — волновой функцией,
- 4. Лекция № 3 4
- 5. Представление наблюдаемых величин в виде операторов с накладываемыми на них ограничениями делается по двум причинам: 1.
- 6. 2.Согласно принципу суперпозиции одна и та же квантовая частица может находиться одновре-менно во множестве квантовых состояний.
- 7. Состояние квантовой системы описывается волновой функцией Ψ(q1, q2, …, qn, t), которая зависит от координат всех
- 8. Каждый из линейных операторов имеет собственные век-торы и собственные вещественные значения, которые и выступают в роли
- 9. Лекция № 3 Почему векторы? Потому что любое динамичес-кое свойство такой квантовой системы как атом или
- 10. Всем динамическим свойствам в кв. мех. можно сопоста-вить эрмитовы матрицы. Они связаны с преобразованием векторов в
- 11. Элементы a11, a22, …, ann находятся на главной диагонали матрицы An×n . Эти элементы назы-ваются главными
- 12. Квадратная матрица называется диагональной, если все элементы этой матрицы, не лежащие на главной диагонали, равны нулю
- 13. Системы декартовых координат Лабораторная система и системы центра масс: А C В Rц.м Вектор Rц.м задает
- 14. Лабораторная система позволяет определить поступательное движение, невращающаяся сис- тема – рассмотреть вращение молекулы как целого, а
- 15. Матрица, заданная в каждой точке трёхмерного простран-ства, описывающая неоднородность этого пространства, действующая на входящий вектор (изменяет
- 16. Классическое представление момента инерции Лекция № 3 16
- 17. Изолированная молекула из 3 атомов. Масса всех атомов различна. Приложив внешн. силу к центру масс сообщаем
- 18. В этой системе есть некое математическое свойство, которое может поворачивать и масштабировать вектора, не меняя при
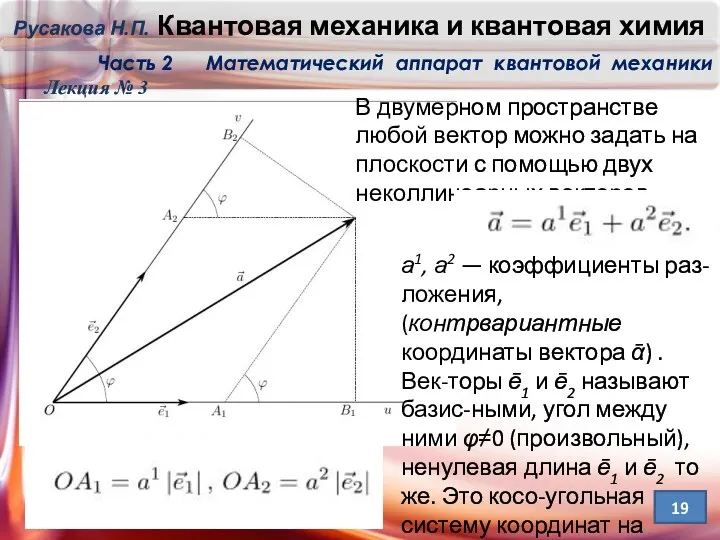
- 19. Лекция № 3 В двумерном пространстве любой вектор можно задать на плоскости с помощью двух неколлинеарных
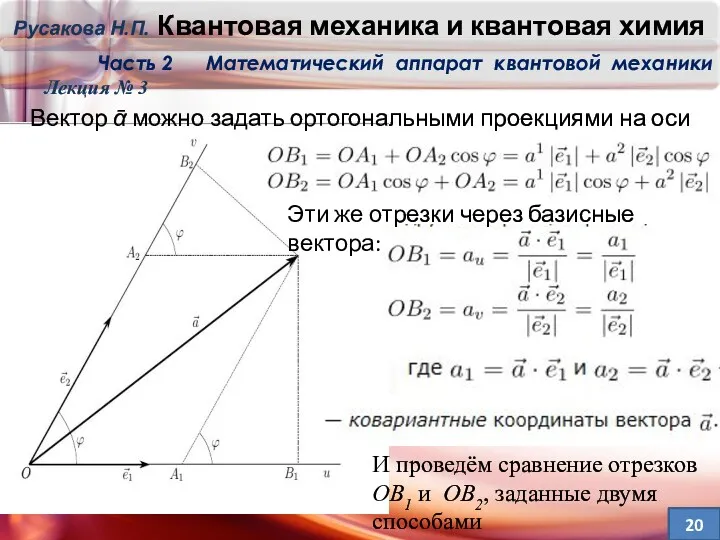
- 20. Лекция № 3 Вектор ᾱ можно задать ортогональными проекциями на оси (v,u) Эти же отрезки через
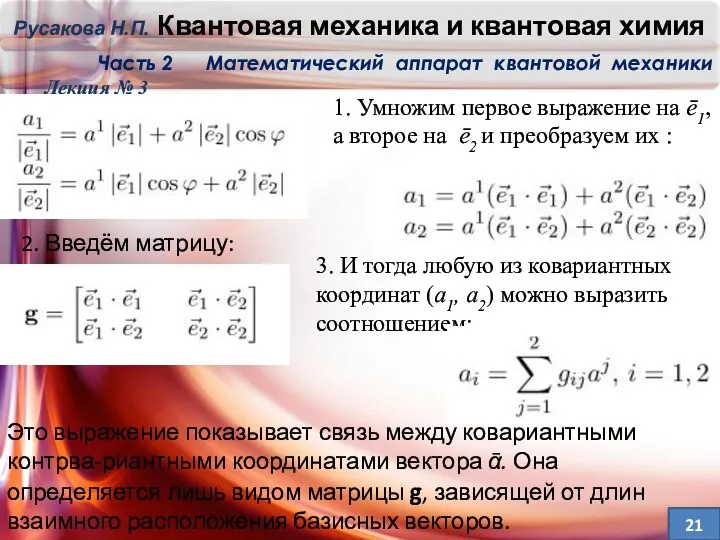
- 21. Лекция № 3 1. Умножим первое выражение на ē1, а второе на ē2 и преобразуем их
- 22. Набор контравариантных и ковариантных компонент, по сути, задают в выбранном базисе один и тот же вектор.
- 23. Спасибо за внимание! Лекция № 3 23
- 25. Скачать презентацию
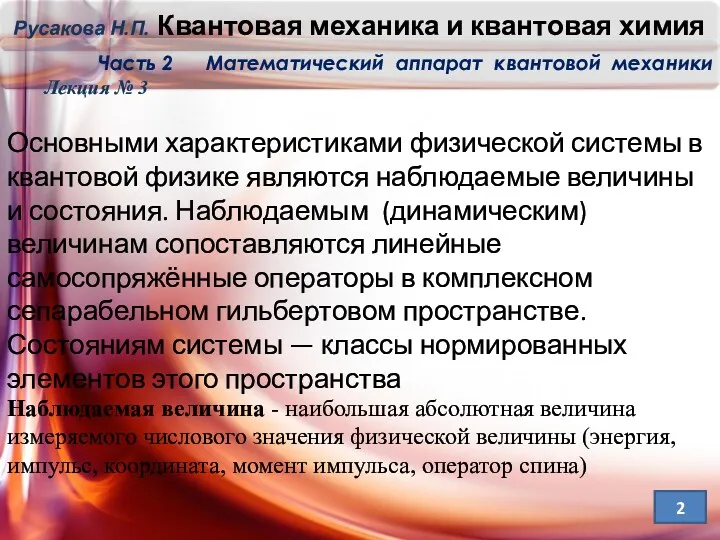
Основными характеристиками физической системы в квантовой физике являются наблюдаемые величины и
Основными характеристиками физической системы в квантовой физике являются наблюдаемые величины и
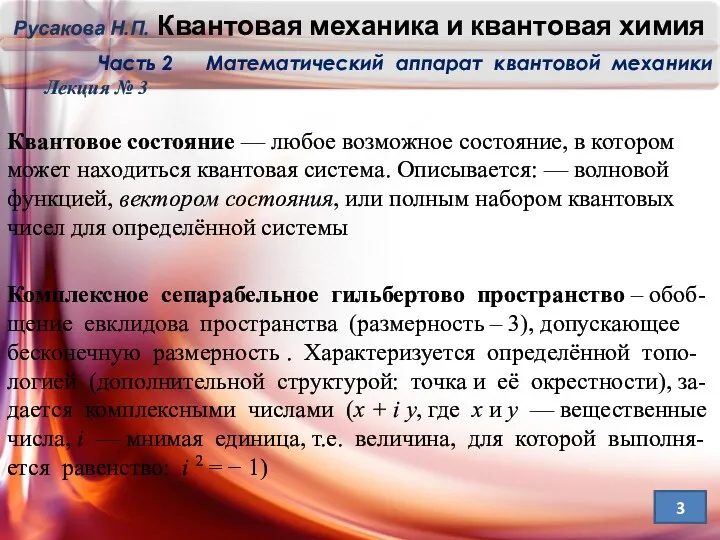
Квантовое состояние — любое возможное состояние, в котором может находиться квантовая система.
Квантовое состояние — любое возможное состояние, в котором может находиться квантовая система.
Лекция № 3
4
Лекция № 3
4
Представление наблюдаемых величин в виде операторов с накладываемыми на них ограничениями
Представление наблюдаемых величин в виде операторов с накладываемыми на них ограничениями
2.Согласно принципу суперпозиции одна и та же квантовая частица может находиться
2.Согласно принципу суперпозиции одна и та же квантовая частица может находиться
Состояние квантовой системы описывается волновой функцией Ψ(q1, q2, …, qn, t),
Состояние квантовой системы описывается волновой функцией Ψ(q1, q2, …, qn, t),
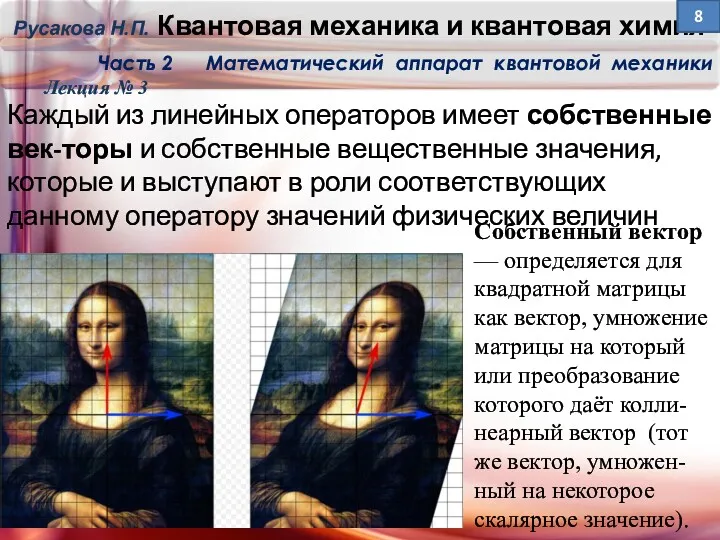
Каждый из линейных операторов имеет собственные век-торы и собственные вещественные значения,
Каждый из линейных операторов имеет собственные век-торы и собственные вещественные значения,
Лекция № 3
Почему векторы?
Потому что любое динамичес-кое свойство такой квантовой системы
Лекция № 3
Почему векторы?
Потому что любое динамичес-кое свойство такой квантовой системы
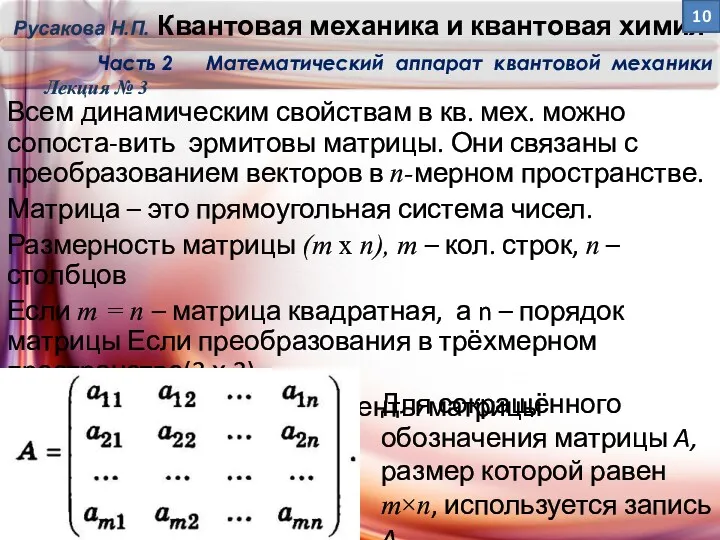
Всем динамическим свойствам в кв. мех. можно сопоста-вить эрмитовы матрицы. Они
Всем динамическим свойствам в кв. мех. можно сопоста-вить эрмитовы матрицы. Они
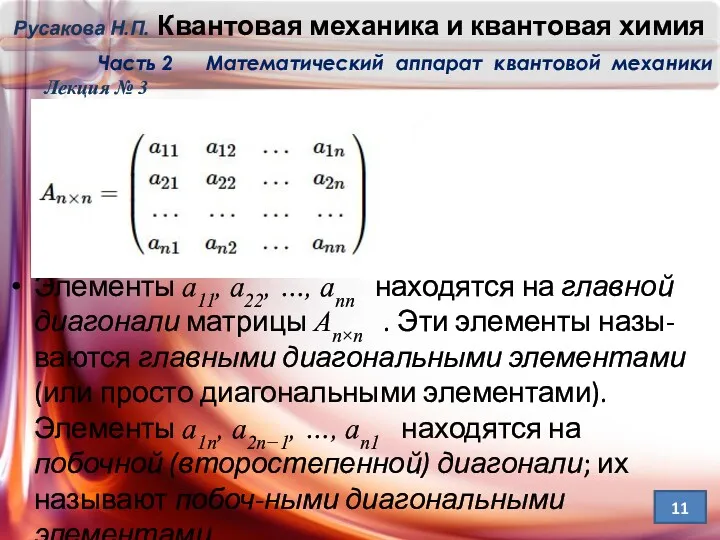
Элементы a11, a22, …, ann находятся на главной диагонали матрицы An×n
Элементы a11, a22, …, ann находятся на главной диагонали матрицы An×n
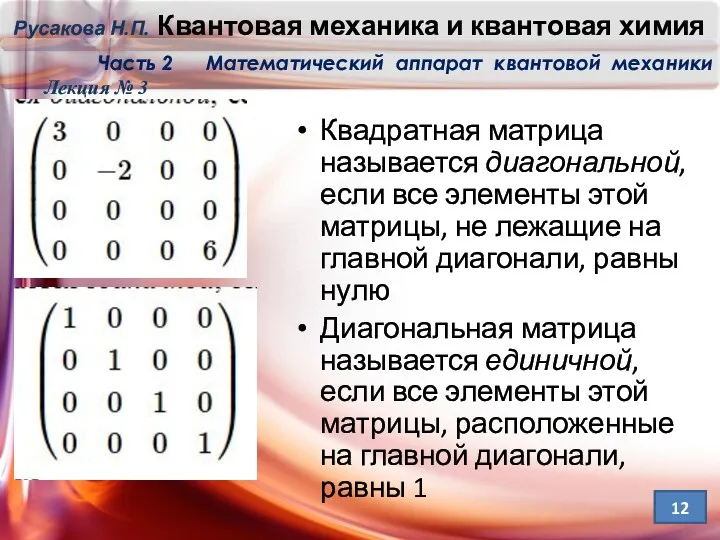
Квадратная матрица называется диагональной, если все элементы этой матрицы, не лежащие
Квадратная матрица называется диагональной, если все элементы этой матрицы, не лежащие

Системы декартовых координат
Лабораторная система и системы центра масс:
А
C
В
Rц.м
Вектор Rц.м задает положение
Системы декартовых координат
Лабораторная система и системы центра масс:
А
C
В
Rц.м
Вектор Rц.м задает положение
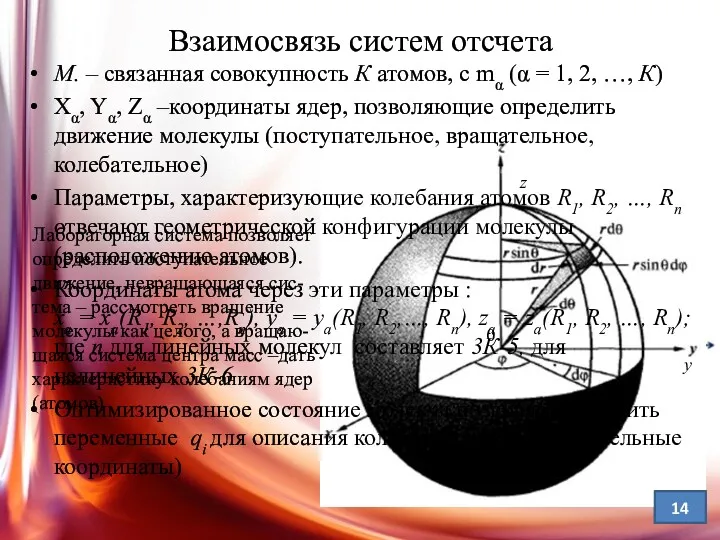
Лабораторная система позволяет определить поступательное движение, невращающаяся сис-
тема – рассмотреть вращение
Лабораторная система позволяет определить поступательное движение, невращающаяся сис- тема – рассмотреть вращение
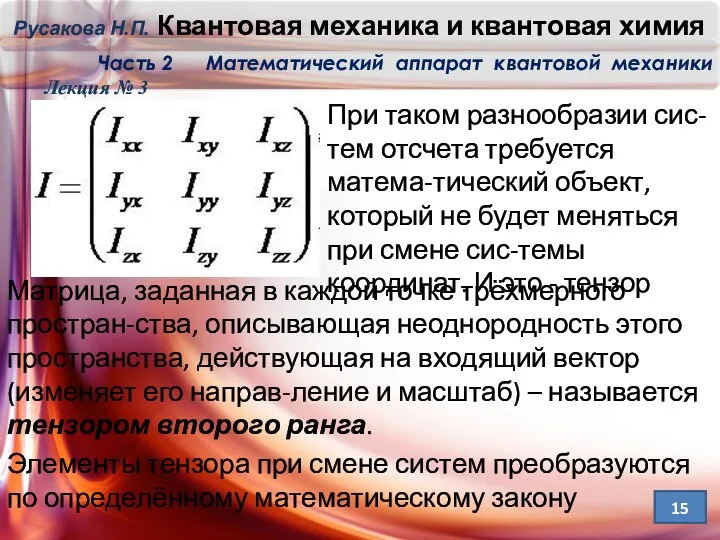
Матрица, заданная в каждой точке трёхмерного простран-ства, описывающая неоднородность этого пространства,
Матрица, заданная в каждой точке трёхмерного простран-ства, описывающая неоднородность этого пространства,
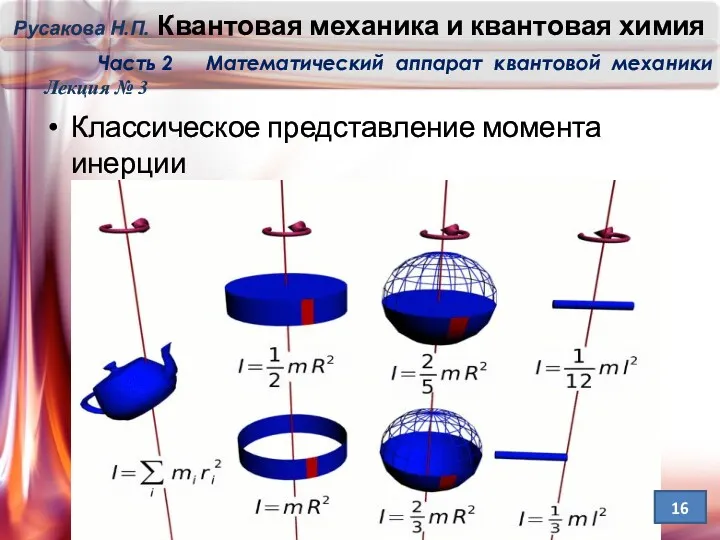
Классическое представление момента инерции
Лекция № 3
16
Классическое представление момента инерции
Лекция № 3
16
Изолированная молекула из 3 атомов. Масса всех атомов различна. Приложив внешн.
Изолированная молекула из 3 атомов. Масса всех атомов различна. Приложив внешн.
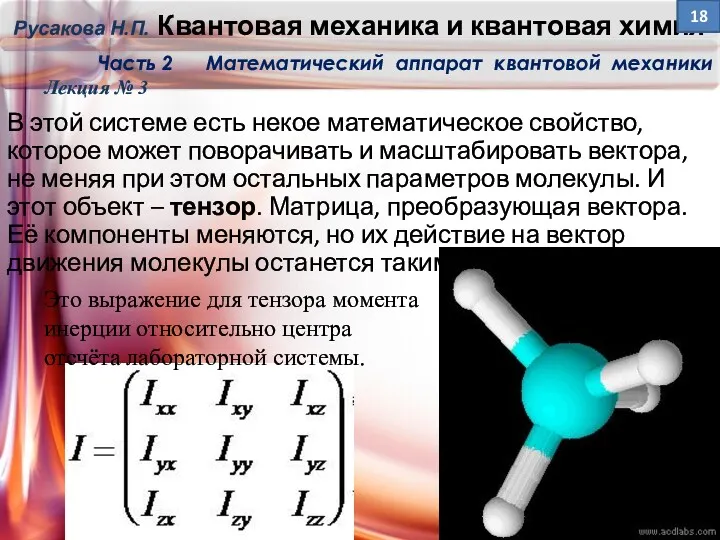
В этой системе есть некое математическое свойство, которое может поворачивать и
В этой системе есть некое математическое свойство, которое может поворачивать и
Лекция № 3
В двумерном пространстве любой вектор можно задать на плоскости
Лекция № 3
В двумерном пространстве любой вектор можно задать на плоскости
Лекция № 3
Вектор ᾱ можно задать ортогональными проекциями на оси (v,u)
Лекция № 3
Вектор ᾱ можно задать ортогональными проекциями на оси (v,u)
Лекция № 3
1. Умножим первое выражение на ē1, а второе на
Лекция № 3
1. Умножим первое выражение на ē1, а второе на
Набор контравариантных и ковариантных компонент, по сути, задают в выбранном базисе
Набор контравариантных и ковариантных компонент, по сути, задают в выбранном базисе
Спасибо за внимание!
Лекция № 3
23
Спасибо за внимание!
Лекция № 3
23
 Открытый урок математики 3 класс
Открытый урок математики 3 класс Случайная величина (СВ) и закон ее распределения
Случайная величина (СВ) и закон ее распределения Расположите в порядке возрастания числа
Расположите в порядке возрастания числа Перетворення подібності та його властивості. Гомотетія
Перетворення подібності та його властивості. Гомотетія Бинарным отношением между элементами
Бинарным отношением между элементами Показательная и логарифмическая функция
Показательная и логарифмическая функция Развитие у детей раннего возраста восприятия цвета, формы и величины
Развитие у детей раннего возраста восприятия цвета, формы и величины Умножение круглых сотен. 3 класс
Умножение круглых сотен. 3 класс Случаи вычитания 12 -
Случаи вычитания 12 - Формулы сокращённого умножения. Урок обобщения. 7 класс
Формулы сокращённого умножения. Урок обобщения. 7 класс Великие математики. Интеллектуальный турнир
Великие математики. Интеллектуальный турнир Введение декартовых координат в пространстве. Формулы середины отрезка и расстояния между двумя точками
Введение декартовых координат в пространстве. Формулы середины отрезка и расстояния между двумя точками Математика в музыке
Математика в музыке Невский проспект Санкт-Петербурга в цифрах. Казанский собор (часть 5)
Невский проспект Санкт-Петербурга в цифрах. Казанский собор (часть 5) еометрические основы построения чертежей. Деление отрезков прямой, углов и окружностей на равные части
еометрические основы построения чертежей. Деление отрезков прямой, углов и окружностей на равные части Решение задач на нахождение дроби от числа. 6 класс
Решение задач на нахождение дроби от числа. 6 класс Модели статистического прогнозирования (11класс)
Модели статистического прогнозирования (11класс) Задачи по математике 5 класс
Задачи по математике 5 класс презентация к уроку математики по теме Устный счет по темеМногозначные числа 2 класс школа 2100
презентация к уроку математики по теме Устный счет по темеМногозначные числа 2 класс школа 2100 Скобки в числовом выражении
Скобки в числовом выражении Симметрия в пространстве. Элементы симметрии правильных многогранников
Симметрия в пространстве. Элементы симметрии правильных многогранников Основы технических измерений
Основы технических измерений Презентация НОД по математике
Презентация НОД по математике Интегральное исчисление
Интегральное исчисление Геометрические задачки на клетчатой бумаге
Геометрические задачки на клетчатой бумаге Состав числа
Состав числа Сравнение чисел. 6 класс
Сравнение чисел. 6 класс Графический метод в изучении коммерческой деятельности
Графический метод в изучении коммерческой деятельности