- Лекция 10. Математическое описание ЛС. Линейная непрерывная система и ее представления

Содержание
- 2. 1 Классификация элементов систем Система автоматического управления – это совокупность элементов, соединенных в замкнутый контур, которые
- 3. По виду энергии, используемой для работы: Электрические Механические Гидравлические Пневматические Комбинированные По характеру математического соответствия между
- 4. При математическом описании элементы называются звеньями САУ. Несмотря на многообразие различного рода элементов (устройств) и независимо
- 5. В позиционном (или усилительном) звене линейной зависимостью y = Ku связаны входная и выходная величина в
- 6. Статические характеристики а – усилительного звена, б – интегрирующего звена, в – дифференцирующего звена
- 7. 2 Уравнения динамики и статики В общем случае линейная система описывается линейным дифференциальным уравнением, представленным в
- 8. Дифференциальные уравнения называют уравнениями динамики, они описывают переходные режимы в системах. Переходной режим возникает при подаче
- 9. 3 Понятие передаточной функции В инженерной практике широко используется метод решения дифференциальных уравнений, основанный на интегральном
- 10. y(t) – оригинал ; Y(s) – изображение функции y(t); s – комплексная переменная; Соответствие между рядом
- 11. При нулевых начальных условиях, т. е. в том случае, если при t (2) Передаточная функция звена
- 12. Примем Прямое преобразование Лапласа
- 13. Передаточные функции звеньев имеют вид: - Позиционное или усилительное звено Интегрирующее звено Дифференцирующее звено Передаточная функция
- 14. Передаточная функция элемента не зависит от того, какой функцией времени является его входное воздействие. Она зависит
- 15. W(s) можно представить следующим образом: где K – коэффициент усиления, – нули системы, т. е. корни
- 16. Для описания моделей систем и действий над ними широко используется система MATLAB и пакет прикладных программ
- 17. zpk-форма нулей, полюсов и коэффициента усиления, в которой передаточная функция описывается двумя векторами-строками и одним числом,
- 18. При описании элементов и систем кроме входных u(t) и выходных y(t) переменных можно выделить некоторые промежуточные
- 19. 4 Передаточные функции различных соединений звеньев При последовательном соединении звеньев с известными передаточными функциями W1(s), W2(s)
- 20. При параллельном соединении звеньев с передаточными функциями W1(s), W2(s) ,…, Wn(s) передаточные функции складываются Y(s) =
- 21. Соединение звеньев с обратной связью имеет прямую цепь передачи сигнала и цепь обратной связи. Для соединения
- 22. 5 Временные характеристики систем и их элементов Типовые воздействия Единичное ступенчатое воздействие Единичное импульсное воздействие, (дельта
- 23. Переходная функция h(t) – это функция, определяющая изменение выходной величины системы (или отдельного элемента) при воздействии
- 24. Импульсная переходная (или весовая) функция w(t) – это функция, определяющая изменение выходной величины системы (или отдельного
- 25. Пример 1: Найти весовую функцию системы, если переходная функция равна Решение: Найдем изображение переходной функции Получаем
- 26. Пример 2. Определить передаточную, переходную и весовую функции звена, которое описывается дифференциальным уравнением Переходя в область
- 28. Скачать презентацию
 Потребительская корзина. Исследование по математике
Потребительская корзина. Исследование по математике Поняття функції. Загальні властивості функцій
Поняття функції. Загальні властивості функцій Описательная статистика. Медиана
Описательная статистика. Медиана Пример решения транспортной задачи (закрытая модель). Исследование операций
Пример решения транспортной задачи (закрытая модель). Исследование операций Элементы математической статистики
Элементы математической статистики Кривые второго порядка
Кривые второго порядка Задачи на нахождение неизвестного по двум разностям 4 класс(практичекий материал)
Задачи на нахождение неизвестного по двум разностям 4 класс(практичекий материал) Математика в ребусах
Математика в ребусах Линии второго порядка на плоскости
Линии второго порядка на плоскости Solving linear recurrence relations
Solving linear recurrence relations Анализ деятельности сложных социально-экономических систем. Часть 1
Анализ деятельности сложных социально-экономических систем. Часть 1 Шар. 6 класс
Шар. 6 класс Прямоугольный параллелепипед. 5 класс
Прямоугольный параллелепипед. 5 класс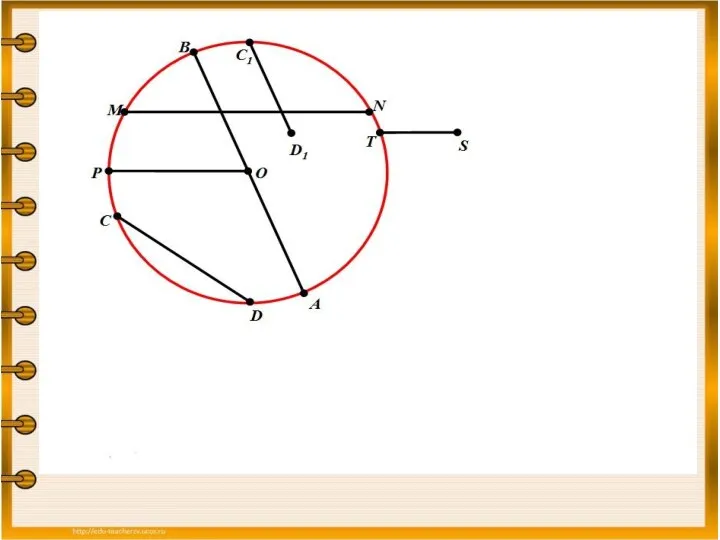 Взаимное расположение прямой и окружности
Взаимное расположение прямой и окружности Геометрические тела на уроках математики
Геометрические тела на уроках математики Многомерная линейная регрессия
Многомерная линейная регрессия Приемы быстрого счета
Приемы быстрого счета Игра-тренажёр по математике Весёлые снежинки. 1 класс. Счёт в пределах 10.
Игра-тренажёр по математике Весёлые снежинки. 1 класс. Счёт в пределах 10. Трикутники навколо нас
Трикутники навколо нас Сумма углов треугольника (7 класс)
Сумма углов треугольника (7 класс) Простые числа. Разложение числа на простые множители
Простые числа. Разложение числа на простые множители Возведение в квадрат суммы и разности двух выражений
Возведение в квадрат суммы и разности двух выражений Предел функции
Предел функции Умножение круглых сотен. 3 класс
Умножение круглых сотен. 3 класс Дроби. Урок-игра Дробный мозгодром. (5 класс)
Дроби. Урок-игра Дробный мозгодром. (5 класс) Вписанная и описанная окружность. ОГЭ (задание № 16)
Вписанная и описанная окружность. ОГЭ (задание № 16) Презентация Решение задач. 1 класс
Презентация Решение задач. 1 класс Размещения. Повторение и закрепление пройденного материала
Размещения. Повторение и закрепление пройденного материала