- Manipulator Kinematics, Link Description, Link Connections

Содержание

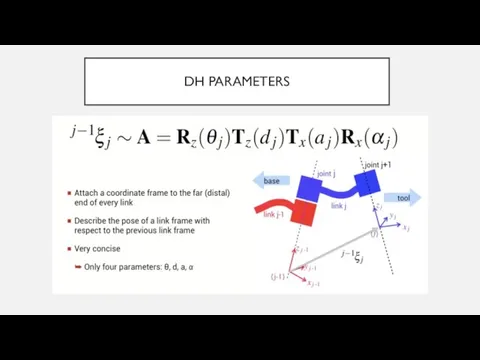
DH PARAMETERS
DH PARAMETERS
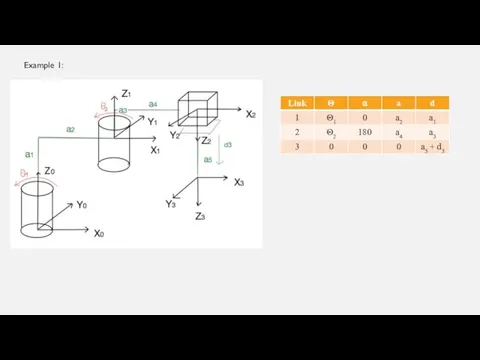
Example 1:
Example 1:

Example 2:
Example 2:
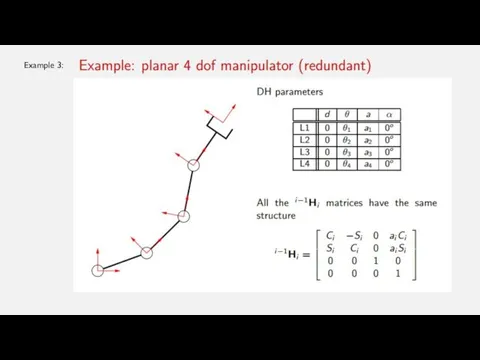
Example 3:
Example 3:

Example 4:
Example 4:

Where, the Rx, Rz – base rotation matrices
Pd, Pa - vectors
Where, the Rx, Rz – base rotation matrices
Pd, Pa - vectors

Denavit Hartenberg matrix:
Final will be:
Denavit Hartenberg matrix:
Final will be:
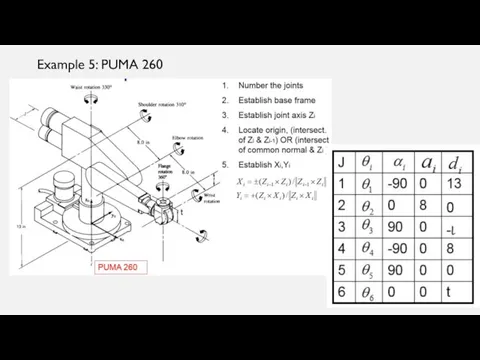
Example 5: PUMA 260
Example 5: PUMA 260

CODE EXAMPLE IN MATLAB
We can animate a path:
CODE EXAMPLE IN MATLAB
We can animate a path:
 Свойства степени с натуральным показателем. 7 класс
Свойства степени с натуральным показателем. 7 класс Круги Эйлера в решении задач
Круги Эйлера в решении задач Производная
Производная Сложение и вычитание простых чисел
Сложение и вычитание простых чисел Исторические вехи развития теории надежности
Исторические вехи развития теории надежности Энтропийные методы исследования экономических процессов. Лекция 4
Энтропийные методы исследования экономических процессов. Лекция 4 Весёлая геометрия
Весёлая геометрия Осевая и центральная симметрии
Осевая и центральная симметрии В школе тётушки Совы. Умножение и деление двузначного числа на однозначное
В школе тётушки Совы. Умножение и деление двузначного числа на однозначное Обобщающий урок по теме: Признаки равенства треугольников
Обобщающий урок по теме: Признаки равенства треугольников НОД по математическому развитию в старшей группе компенсирующей направленности (для детей с нарушением зрения)
НОД по математическому развитию в старшей группе компенсирующей направленности (для детей с нарушением зрения) Презентация по теме: Многоугольники 2 класс.( Программа Начальная школа XXI века)
Презентация по теме: Многоугольники 2 класс.( Программа Начальная школа XXI века) Мастер класс Универсальная математическая игра Ах эти веселые осьминожки
Мастер класс Универсальная математическая игра Ах эти веселые осьминожки Функцияның өсу кему белгілері
Функцияның өсу кему белгілері Методика решения задач Задача на встречное движение
Методика решения задач Задача на встречное движение Признаки делимости на 2; 3; 5; 9; 10
Признаки делимости на 2; 3; 5; 9; 10 Сумма углов треугольника
Сумма углов треугольника Урок-сказка по теме Натуральные числа по мотивам сказки Золотой ключик
Урок-сказка по теме Натуральные числа по мотивам сказки Золотой ключик Проценты 5 класс
Проценты 5 класс Линейная функция и её график
Линейная функция и её график Таблица сложения
Таблица сложения Շրջանագծի շոշափող
Շրջանագծի շոշափող Сходимость знакоположительных рядов
Сходимость знакоположительных рядов Метрология основное
Метрология основное Сравнение десятичных дробей
Сравнение десятичных дробей Одночлены
Одночлены Законы распределения случайных величин. Лекция 2
Законы распределения случайных величин. Лекция 2 Простейшие вероятностные задачи (11 класс)
Простейшие вероятностные задачи (11 класс)