- Математические модели объектов проектирования

Содержание
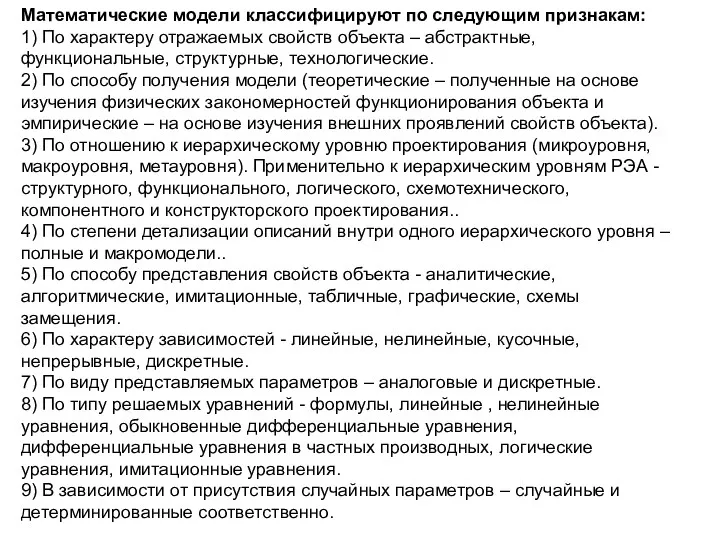
- 2. Математические модели классифицируют по следующим признакам: 1) По характеру отражаемых свойств объекта – абстрактные, функциональные, структурные,
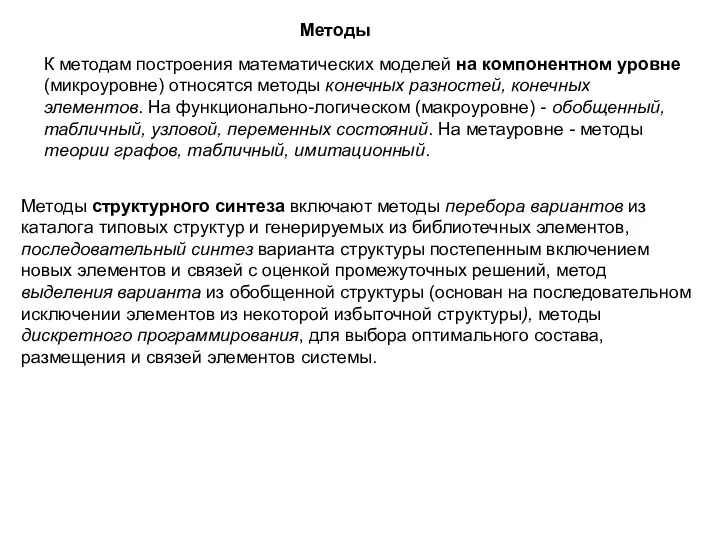
- 3. Методы К методам построения математических моделей на компонентном уровне (микроуровне) относятся методы конечных разностей, конечных элементов.
- 4. Структурное проектирование РЭА Исходными данными для проектирования структурной схемы являются: типы блоков с известными параметрами и
- 5. Рис. 3.— Блок схема процесса проектирования структуры
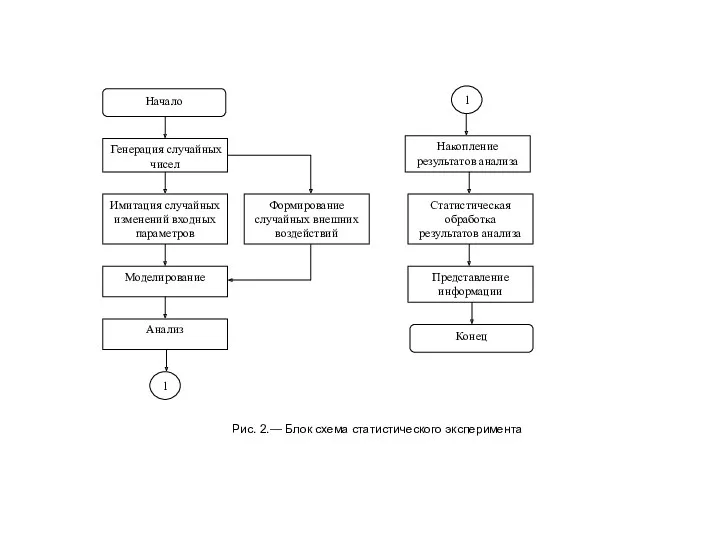
- 6. Рис. 2.— Блок схема статистического эксперимента
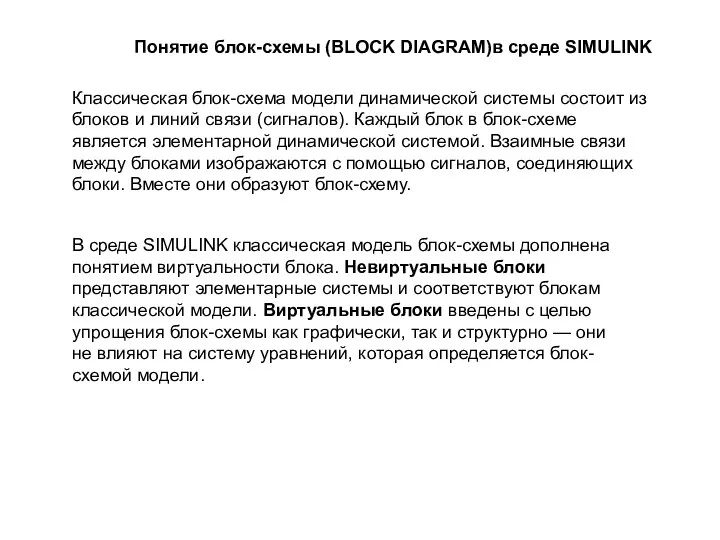
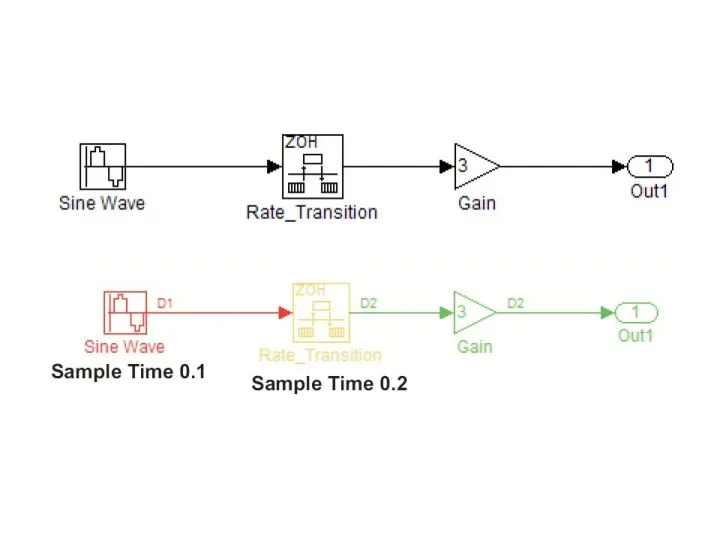
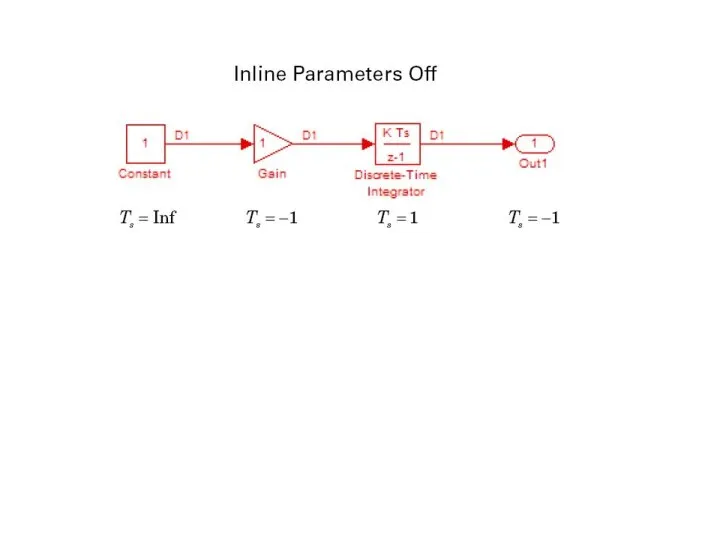
- 7. Понятие блок-схемы (BLOCK DIAGRAM)в среде SIMULINK Классическая блок-схема модели динамической системы состоит из блоков и линий
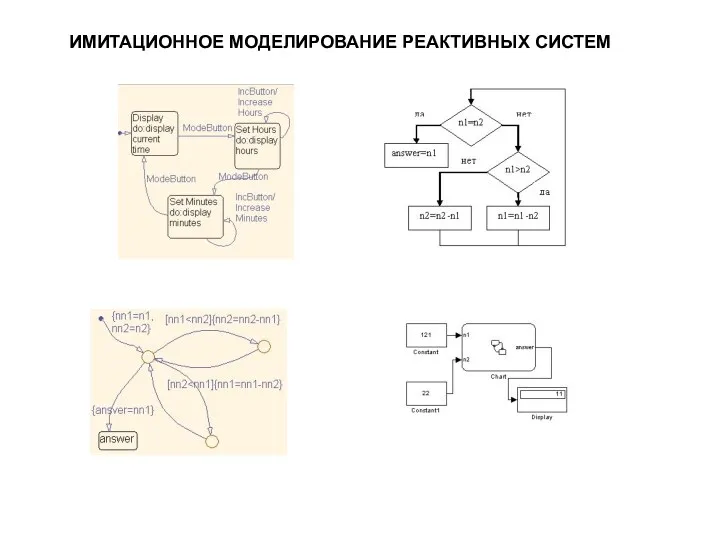
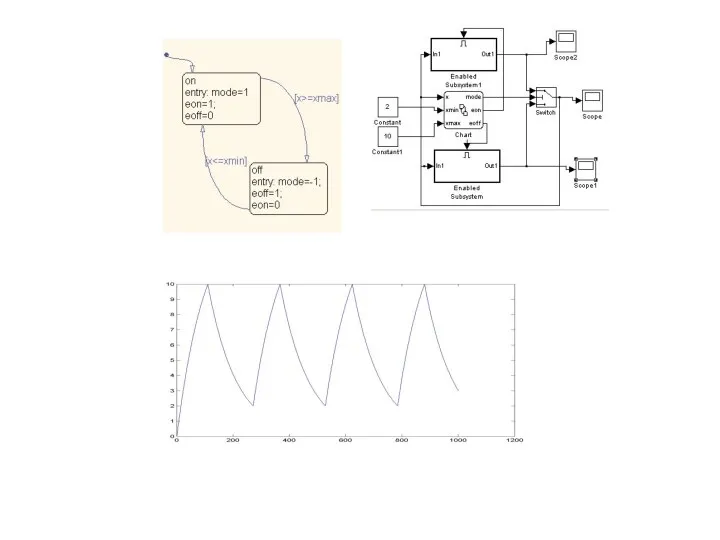
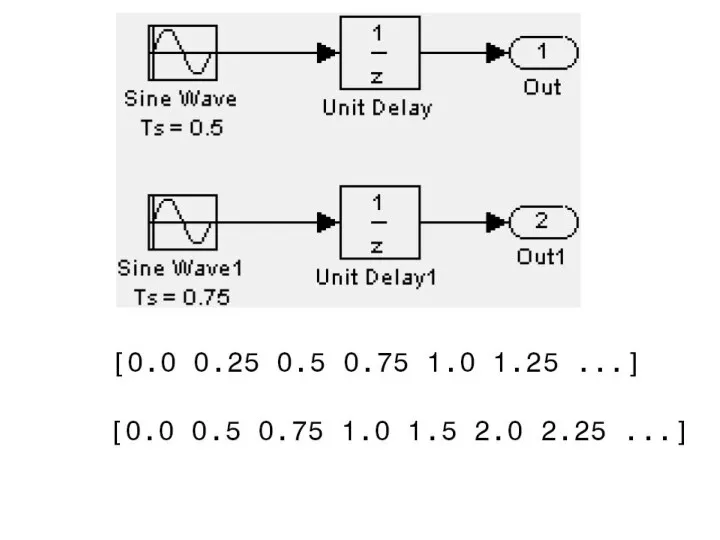
- 8. ИМИТАЦИОННОЕ МОДЕЛИРОВАНИЕ РЕАКТИВНЫХ СИСТЕМ
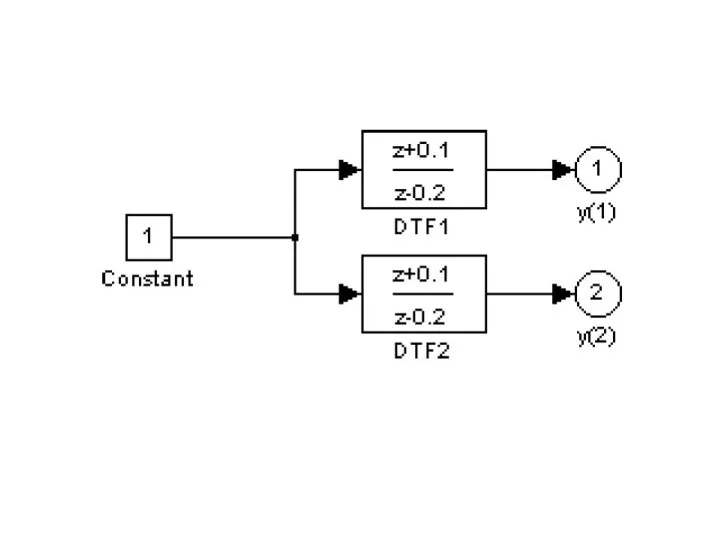
- 9. В среде SIMULINK блок-схемы описывают во времени зависимости между сигналами и переменными состояния. Моделирование блок-схемы выполняется
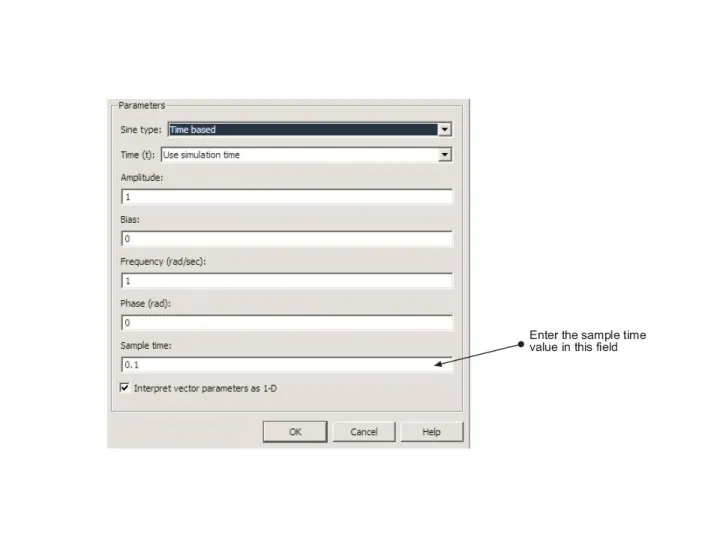
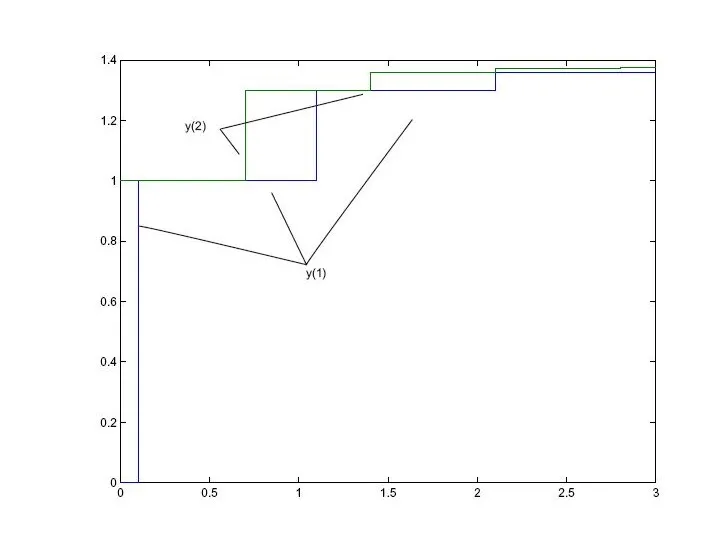
- 10. Сигналы представляют собой величины, которые изменяются во времени и которые определены для всех моментов времени между
- 12. Понятие состояния (STATE) в среде SIMULINK Обычно текущие значения выходных параметров системы и, соответственно, модели являются
- 24. Скачать презентацию
Математические модели классифицируют по следующим признакам:
1) По характеру отражаемых свойств объекта – абстрактные,
Математические модели классифицируют по следующим признакам:
1) По характеру отражаемых свойств объекта – абстрактные,
Методы
К методам построения математических моделей на компонентном уровне (микроуровне) относятся методы конечных разностей,
Методы
К методам построения математических моделей на компонентном уровне (микроуровне) относятся методы конечных разностей,
Структурное проектирование РЭА
Исходными данными для проектирования структурной схемы являются: типы блоков с известными
Структурное проектирование РЭА
Исходными данными для проектирования структурной схемы являются: типы блоков с известными
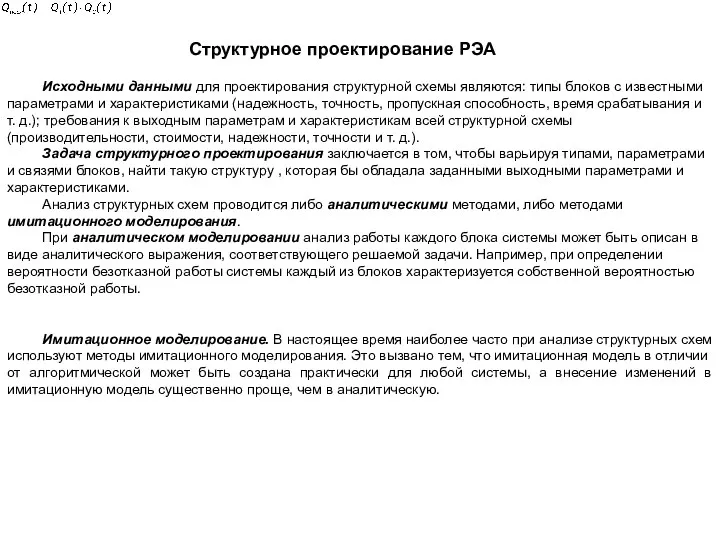
Рис. 3.— Блок схема процесса проектирования структуры
Рис. 3.— Блок схема процесса проектирования структуры
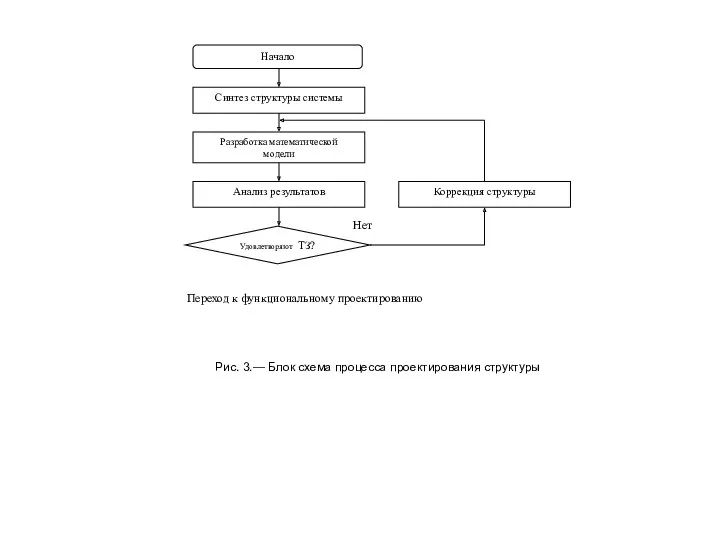
Рис. 2.— Блок схема статистического эксперимента
Рис. 2.— Блок схема статистического эксперимента
Понятие блок-схемы (BLOCK DIAGRAM)в среде SIMULINK
Классическая блок-схема модели динамической системы состоит из
Понятие блок-схемы (BLOCK DIAGRAM)в среде SIMULINK
Классическая блок-схема модели динамической системы состоит из
ИМИТАЦИОННОЕ МОДЕЛИРОВАНИЕ РЕАКТИВНЫХ СИСТЕМ
ИМИТАЦИОННОЕ МОДЕЛИРОВАНИЕ РЕАКТИВНЫХ СИСТЕМ
В среде SIMULINK блок-схемы описывают во времени зависимости между сигналами и переменными состояния.
В среде SIMULINK блок-схемы описывают во времени зависимости между сигналами и переменными состояния.
Сигналы представляют собой величины, которые изменяются во времени и которые определены для всех
Сигналы представляют собой величины, которые изменяются во времени и которые определены для всех
Понятие состояния (STATE) в среде SIMULINK
Обычно текущие значения выходных параметров системы и,
Понятие состояния (STATE) в среде SIMULINK
Обычно текущие значения выходных параметров системы и,

 Раскрытие скобок
Раскрытие скобок Решение задач. Закрепление.
Решение задач. Закрепление. Теорема Менелая
Теорема Менелая Возникновение и развитие алгебры
Возникновение и развитие алгебры Взаимное пересечение поверхностей
Взаимное пересечение поверхностей Умножение и деление чисел с разными знаками
Умножение и деление чисел с разными знаками Игра-тренажер 1 класс Сложение с переходом через 10
Игра-тренажер 1 класс Сложение с переходом через 10 Подготовка к ЕГЭ, ГИА. Задачи на часы
Подготовка к ЕГЭ, ГИА. Задачи на часы ДУ высших порядков. Задача Коши для уравнения порядка n
ДУ высших порядков. Задача Коши для уравнения порядка n Задачи по теории вероятностей. Бросают кубики
Задачи по теории вероятностей. Бросают кубики Координаты и векторы
Координаты и векторы Тераэдр, параллелепипед
Тераэдр, параллелепипед Умножение многочлена на многочлен
Умножение многочлена на многочлен Состав числа
Состав числа Состав двузначных чисел(Математика 2 класс)
Состав двузначных чисел(Математика 2 класс) Анализ упражнений на нумерацию чисел концентра сотня в учебниках по математике Л.Г. Петерсон
Анализ упражнений на нумерацию чисел концентра сотня в учебниках по математике Л.Г. Петерсон Блиц опрос (работа в парах)
Блиц опрос (работа в парах) Проценты. 6 класс
Проценты. 6 класс Магические числа. 5 класс
Магические числа. 5 класс Презентация Построй дом к уроку математике по теме Вычитание однозначного числа из двузначного без перехода через разряд
Презентация Построй дом к уроку математике по теме Вычитание однозначного числа из двузначного без перехода через разряд Нахождение части целого на основе формального правила
Нахождение части целого на основе формального правила Квадратное неравенство
Квадратное неравенство Эконометрика. Эконометрическое моделирование
Эконометрика. Эконометрическое моделирование Сумма углов треугольника
Сумма углов треугольника Все вокруг геометрия
Все вокруг геометрия Сфера и её элементы. Уравнение сферы в заданной системе координат
Сфера и её элементы. Уравнение сферы в заданной системе координат Урок математики Виды треугольников Слайд Виды треугольников (по углам)
Урок математики Виды треугольников Слайд Виды треугольников (по углам) Метрологические характеристики технических измерений
Метрологические характеристики технических измерений