- Математические модели систем автоматического управления

Содержание
- 2. Математическую модель САУ используют для изучения работы систем автоматического регулирования при установившемся режиме работы, а также
- 3. Дифференциальное уравнение САУ ai, bi - постоянные коэффициенты, у – управляемая (выходная) величина, х – входная
- 4. Дифференциальное уравнение САУ В операторной форме это уравнение: D(p) – оператор левой части М(р) – оператор
- 5. Дифференциальное уравнение САУ Часто используют понятие передаточной функции, выражение которой получают: Передаточная функция – это отношение
- 6. Преобразование Лапласа Для решения дифференциального уравнения системы используют метод анализа, основанный на преобразованиях Лапласа. Тема 6.
- 7. Преобразование Лапласа Тема 6. «Математические модели САУ»
- 8. Преобразование Лапласа Применив преобразование Лапласа к дифференциальному уравнению, получим связь изображений входной и выходной функций: Тема
- 9. Амплитудно-фазовая частотная (АФЧ) характеристика системы Если в выражение передаточной функции подставить вместо оператора р мнимую переменную
- 10. Линейные системы Для линейных систем передаточная функция исчерпывающе характеризует поведение системы при любых возмущениях, так как
- 11. ПРИМЕР: Пусть передаточная функция имеет вид: Тема 6. «Математические модели САУ» Поскольку изображение функции изменения выходного
- 12. Замечание Тема 6. «Математические модели САУ» Для получения математической модели автоматической системы необходимо все реальные элементы
- 13. Типовые динамические звенья и способы их соединения. Тема 6. «Математические модели САУ» Типовое динамическое звено –
- 14. БЕЗЫНЕРЦИОННЫЕ ЗВЕНЬЯ. Тема 6. «Математические модели САУ» Звенья у которых при скачкообразном изменении входного сигнала, выходной
- 15. БЕЗЫНЕРЦИОННЫЕ ЗВЕНЬЯ. Тема 6. «Математические модели САУ» К безынерционным звеньям можно отнести передаточные механизмы, усилители, насосы
- 16. ИНЕРЦИОННЫЕ ЗВЕНЬЯ. Тема 6. «Математические модели САУ» при скачкообразном изменении входного сигнала, выходной сигнал стремиться к
- 17. ИНЕРЦИОННЫЕ ЗВЕНЬЯ. Тема 6. «Математические модели САУ» К инерционным звеньям можно отнести баки с жидкостью, электродвигатели
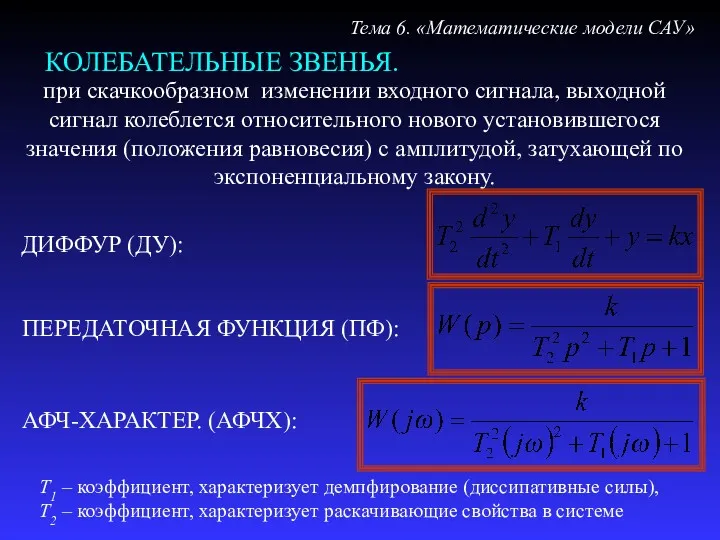
- 18. КОЛЕБАТЕЛЬНЫЕ ЗВЕНЬЯ. Тема 6. «Математические модели САУ» при скачкообразном изменении входного сигнала, выходной сигнал колеблется относительного
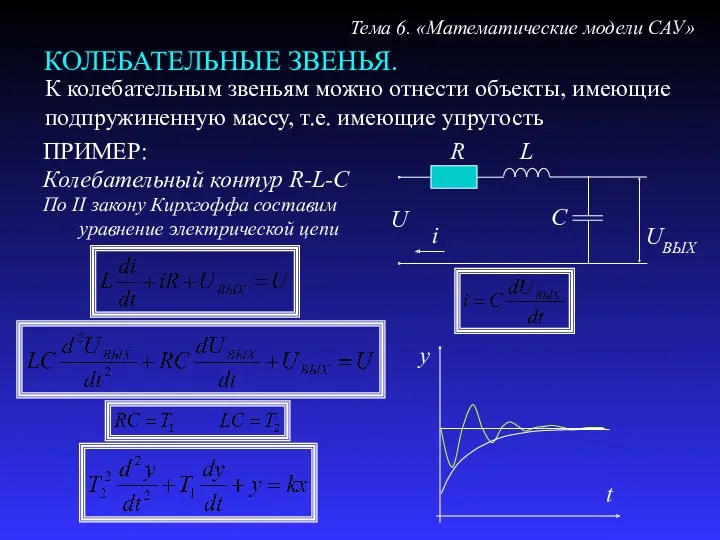
- 19. КОЛЕБАТЕЛЬНЫЕ ЗВЕНЬЯ. Тема 6. «Математические модели САУ» К колебательным звеньям можно отнести объекты, имеющие подпружиненную массу,
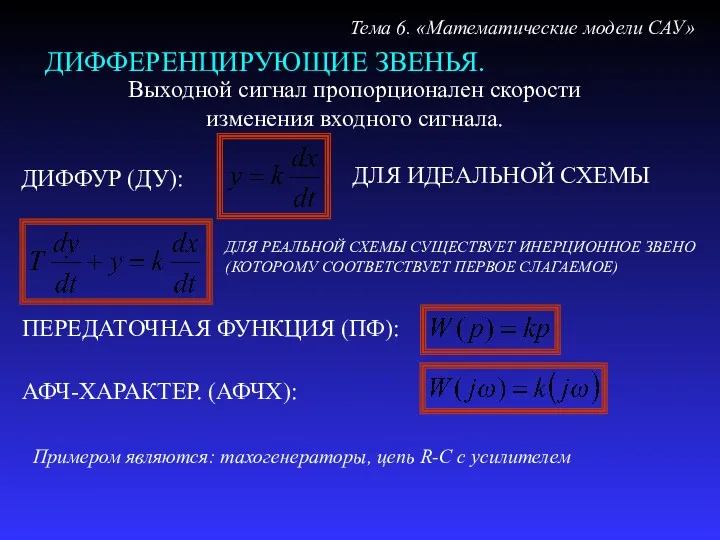
- 20. ДИФФЕРЕНЦИРУЮЩИЕ ЗВЕНЬЯ. Тема 6. «Математические модели САУ» Выходной сигнал пропорционален скорости изменения входного сигнала. ДИФФУР (ДУ):
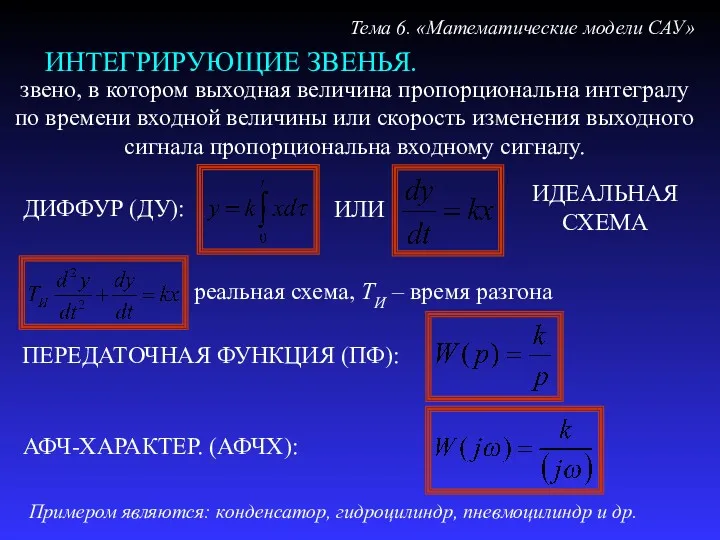
- 21. ИНТЕГРИРУЮЩИЕ ЗВЕНЬЯ. Тема 6. «Математические модели САУ» звено, в котором выходная величина пропорциональна интегралу по времени
- 22. СОЕДИНЕНИЯ ЗВЕНЬЕВ Тема 6. «Математические модели САУ» К ОСНОВНЫМ (СТАНДАРТНЫМ) СОЕДИНЕНИЯМ ЗВЕНЬЕВ ОТНОСЯТСЯ: 4. ЗВЕНО, ОХВАЧЕННОЕ
- 23. ПОСЛЕДОВАТЕЛЬНОЕ СОЕДИНЕНИЕ Тема 6. «Математические модели САУ» ОПРЕДЕЛИТЬ ПЕРЕДАТОЧНУЮ ФУНКЦИЮ
- 24. ПАРАЛЛЕЛЬНОЕ СОЕДИНЕНИЕ Тема 6. «Математические модели САУ» ОПРЕДЕЛИТЬ ПЕРЕДАТОЧНУЮ ФУНКЦИЮ
- 25. ОХВАЧЕННОЕ ЕДИНИЧНОЙ ОБРАТНОЙ СВЯЗЬЮ Тема 6. «Математические модели САУ» ОПРЕДЕЛИТЬ ПЕРЕДАТОЧНУЮ ФУНКЦИЮ
- 26. ОБРАТНАЯ СВЯЗЬ ЧЕРЕЗ ПРОМЕЖУТОЧНОЕ ЗВЕНО Тема 6. «Математические модели САУ» ОПРЕДЕЛИТЬ ПЕРЕДАТОЧНУЮ ФУНКЦИЮ
- 27. ТЕХНОЛОГИЯ ПОЛУЧЕНИЯ МАТЕМАТИЧЕСКОЙ МОДЕЛИ АВТОМАТИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ Тема 6. «Математические модели САУ» Для получения математической модели
- 28. ПРИМЕР ПОЛУЧЕНИЯ МАТЕМАТИЧЕСКОЙ МОДЕЛИ АВТОМАТИЧЕСКОЙ СИСТЕМЫ Тема 6. «Математические модели САУ» САУ регулирования напряжения генератора с
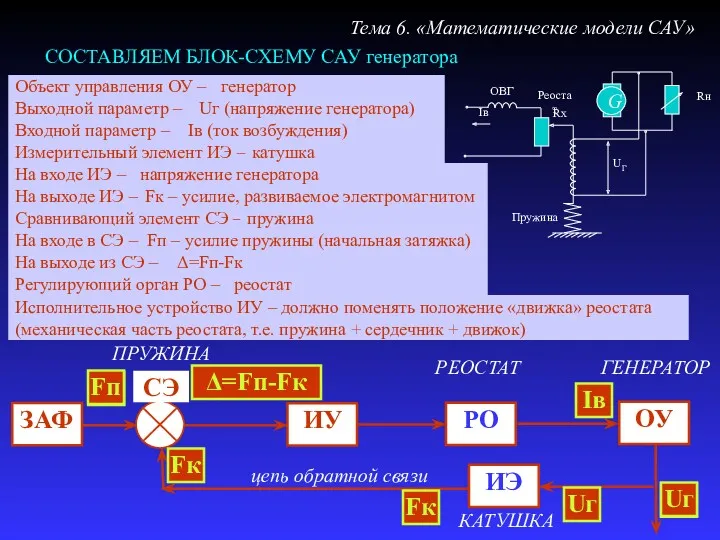
- 29. Выходной параметр – СОСТАВЛЯЕМ БЛОК-СХЕМУ САУ генератора Тема 6. «Математические модели САУ» Uг (напряжение генератора) Объект
- 30. ЗАМЕНЯЕМ ЭЛЕМЕНТЫ АВТОМАТИКИ ТИПОВЫМИ ДИНАМИЧЕСКИМИ ЗВЕНЬЯМИ Тема 6. «Математические модели САУ» Объект управления ОУ: Катушка –
- 31. ПРОДОЛЖЕНИЕ Тема 6. «Математические модели САУ» Исполнительное устройство ИУ: Реостат – безынерционное звено (с некоторым допущением)
- 32. СТРОИМ СТРУКТУРНУЮ СХЕМУ САУ, заменяя функциональные блоки типовыми звеньями Тема 6. «Математические модели САУ» W3(p) W1(p)
- 33. ПРИВОДИМ СХЕМУ К ПРОСТОМУ ВИДУ Тема 6. «Математические модели САУ» Получим типовое соединение – соединение с
- 34. ПОЛУЧАЕМ МАТЕМАТИЧЕСКУЮ МОДЕЛЬ САУ Тема 6. «Математические модели САУ» ИМЕЕМ ПЕРЕДАТОЧНУЮ ФУНКЦИЮ САУ ПРИРАВНИВАЕМ ЗНАМЕНАТЕЛЬ К
- 35. ПРИМЕНЕНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ Тема 6. «Математические модели САУ» МАТЕМАТИЧЕСКУЮ МОДЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯ ПРМИЕНЯЮТ ПРИ ОЦЕНКЕ УСТОЙЧИВОСТИ
- 36. Тема 6.1 УСТОЙЧИВОСТЬ АВТОМАТИЧЕСКИХ СИСТЕМ Тема 6. «Математические модели САУ»
- 37. Устойчивость – свойство возвращаться в состояние устойчивого равновесия после снятия возмущения, нарушевшего равновесное состояние. Тема 6.
- 38. Метод динамических характеристик Тема 6. «Математические модели САУ» t Δy 1 2 3 4 1 –
- 39. Метод корней характеристического уравнения Тема 6. «Математические модели САУ» ИСПОЛЬЗУЮТ ХАРАКТЕРИСТИЧЕСКОЕ УРАВНЕНИЕ – МАТЕМАТИЧЕСКУЮ МОДЕЛЬ САУ
- 40. Специальные критерии устойчивости систем Тема 6. «Математические модели САУ» Алгебраические критерии: критерий Гурвица, критерий Раусса Частотный
- 41. Критерий Гурвица Тема 6. «Математические модели САУ» ИЗ КОЭФФИЦИЕНТОВ УРАВНЕНИЯ ФОРМИРУЕМ ДИАГОНАЛЬНЫЙ МИНОР заполним диагональ минора
- 42. Критерий Раусса Тема 6. «Математические модели САУ» СОСТАВИМ СПЕЦИАЛЬНУЮ ТАБЛИЦУ первая строка заполняется коэффициентами с четными
- 43. Критерий Михайлова Тема 6. «Математические модели САУ» Запишем уравнение в форме полинома через оператор Лапласса четные
- 44. Точки пересечения с осями комплексной плоскости Тема 6. «Математические модели САУ» Пересечение с мнимой осью ПУСТЬ
- 46. Скачать презентацию
Математическую модель САУ используют
для изучения работы систем автоматического регулирования при
Математическую модель САУ используют
для изучения работы систем автоматического регулирования при
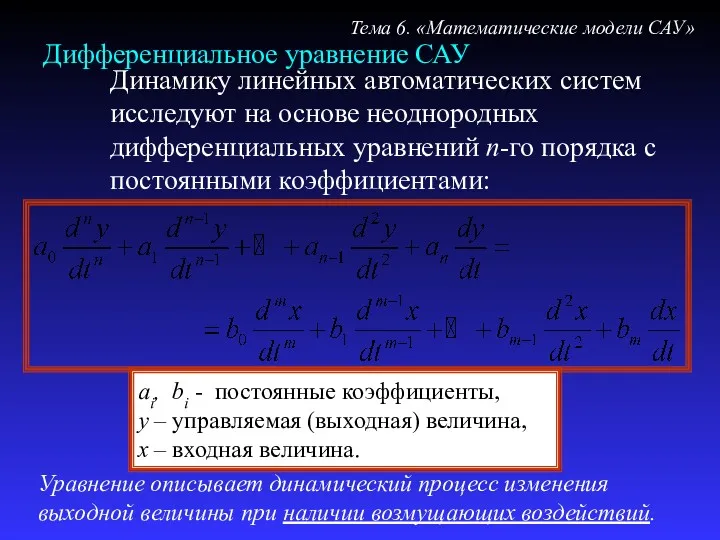
Дифференциальное уравнение САУ
ai, bi - постоянные коэффициенты,
у – управляемая (выходная) величина,
х
Дифференциальное уравнение САУ
ai, bi - постоянные коэффициенты,
у – управляемая (выходная) величина,
х
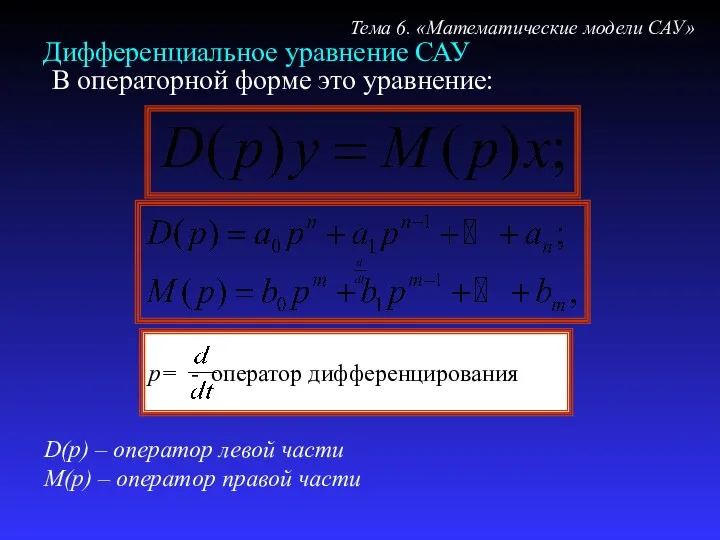
Дифференциальное уравнение САУ
В операторной форме это уравнение:
D(p) – оператор левой части
М(р)
Дифференциальное уравнение САУ
В операторной форме это уравнение:
D(p) – оператор левой части
М(р)
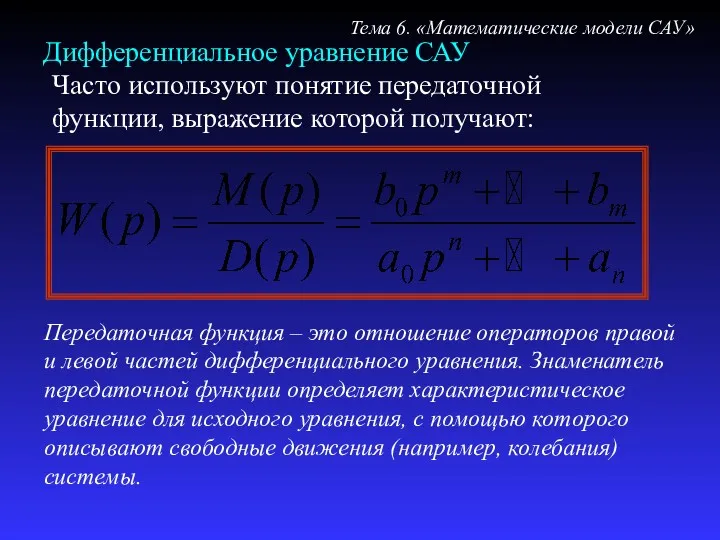
Дифференциальное уравнение САУ
Часто используют понятие передаточной
функции, выражение которой получают:
Передаточная функция
Дифференциальное уравнение САУ
Часто используют понятие передаточной
функции, выражение которой получают:
Передаточная функция
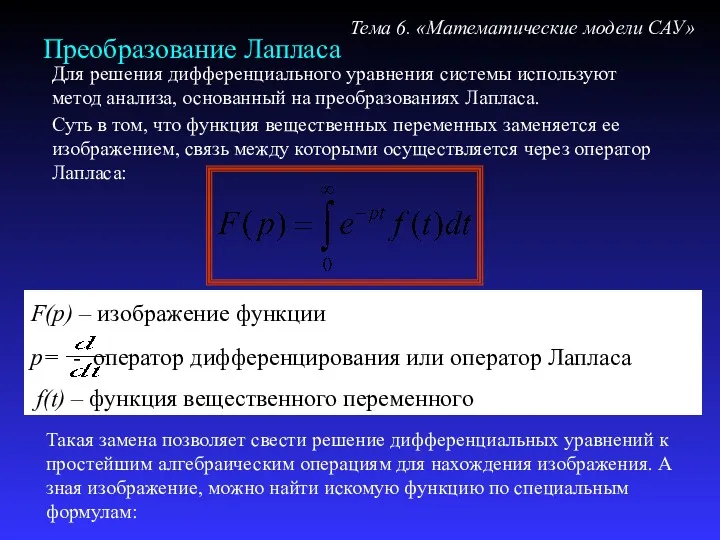
Преобразование Лапласа
Для решения дифференциального уравнения системы используют
метод анализа, основанный на
Преобразование Лапласа
Для решения дифференциального уравнения системы используют метод анализа, основанный на
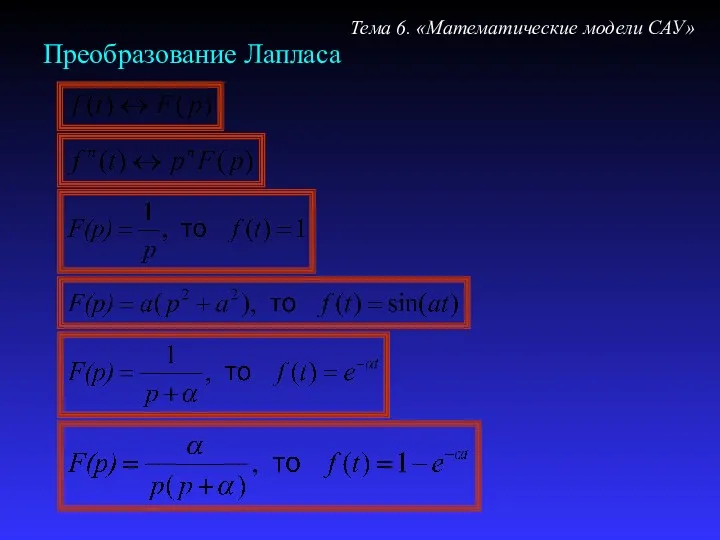
Преобразование Лапласа
Тема 6. «Математические модели САУ»
Преобразование Лапласа
Тема 6. «Математические модели САУ»
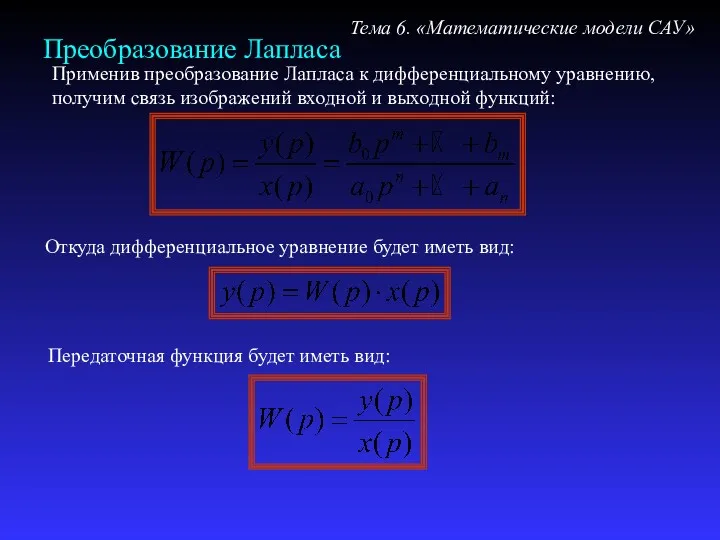
Преобразование Лапласа
Применив преобразование Лапласа к дифференциальному уравнению, получим связь изображений входной
Преобразование Лапласа
Применив преобразование Лапласа к дифференциальному уравнению, получим связь изображений входной
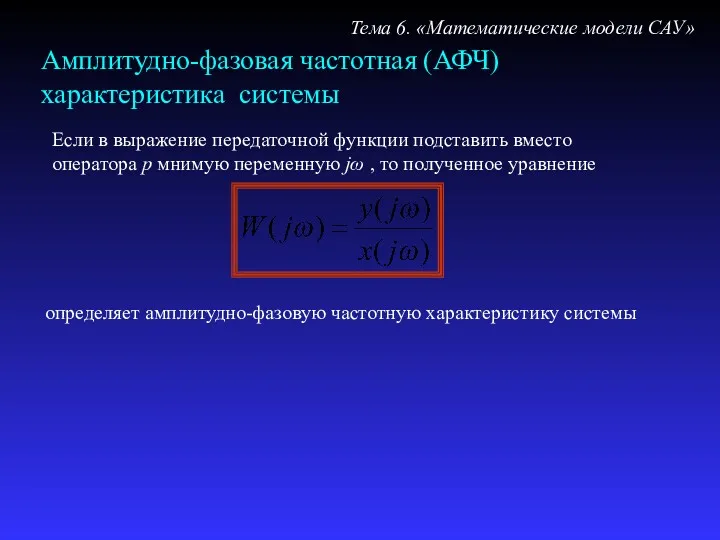
Амплитудно-фазовая частотная (АФЧ) характеристика системы
Если в выражение передаточной функции подставить вместо
Амплитудно-фазовая частотная (АФЧ) характеристика системы
Если в выражение передаточной функции подставить вместо
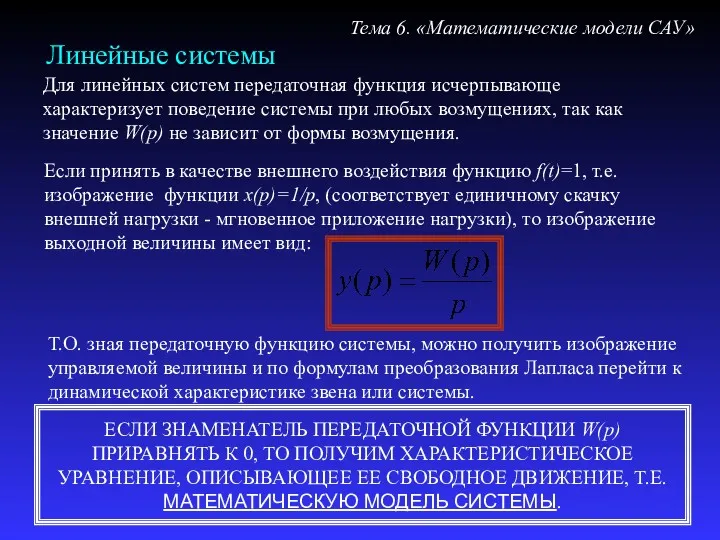
Линейные системы
Для линейных систем передаточная функция исчерпывающе характеризует поведение системы при
Линейные системы
Для линейных систем передаточная функция исчерпывающе характеризует поведение системы при
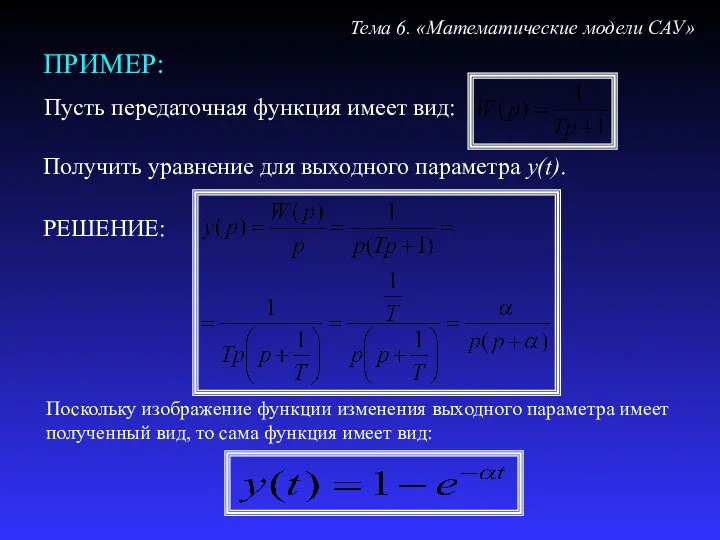
ПРИМЕР:
Пусть передаточная функция имеет вид:
Тема 6. «Математические модели САУ»
Поскольку изображение функции
ПРИМЕР:
Пусть передаточная функция имеет вид:
Тема 6. «Математические модели САУ»
Поскольку изображение функции
Замечание
Тема 6. «Математические модели САУ»
Для получения математической модели автоматической системы необходимо
Замечание
Тема 6. «Математические модели САУ»
Для получения математической модели автоматической системы необходимо
Типовые динамические звенья и способы их соединения.
Тема 6. «Математические модели САУ»
Типовое
Типовые динамические звенья и способы их соединения.
Тема 6. «Математические модели САУ»
Типовое
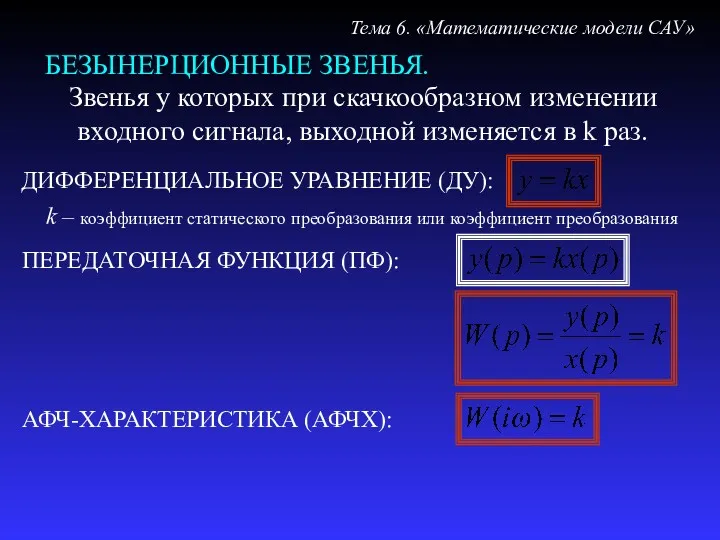
БЕЗЫНЕРЦИОННЫЕ ЗВЕНЬЯ.
Тема 6. «Математические модели САУ»
Звенья у которых при скачкообразном изменении
БЕЗЫНЕРЦИОННЫЕ ЗВЕНЬЯ.
Тема 6. «Математические модели САУ»
Звенья у которых при скачкообразном изменении
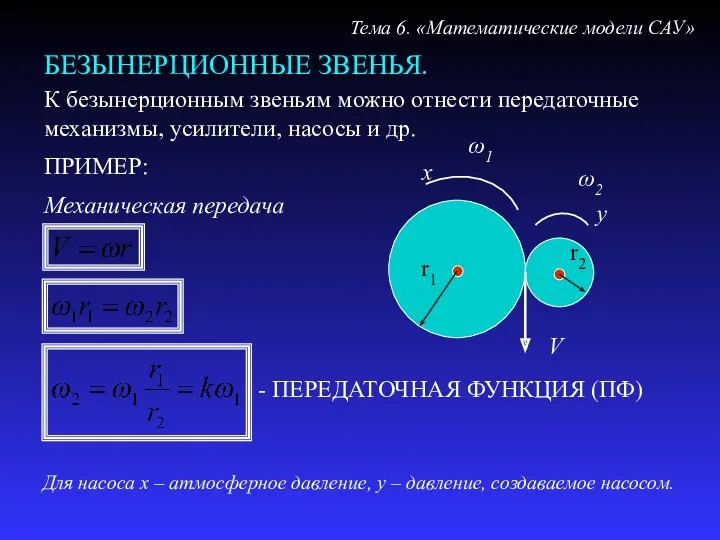
БЕЗЫНЕРЦИОННЫЕ ЗВЕНЬЯ.
Тема 6. «Математические модели САУ»
К безынерционным звеньям можно отнести передаточные
БЕЗЫНЕРЦИОННЫЕ ЗВЕНЬЯ.
Тема 6. «Математические модели САУ»
К безынерционным звеньям можно отнести передаточные
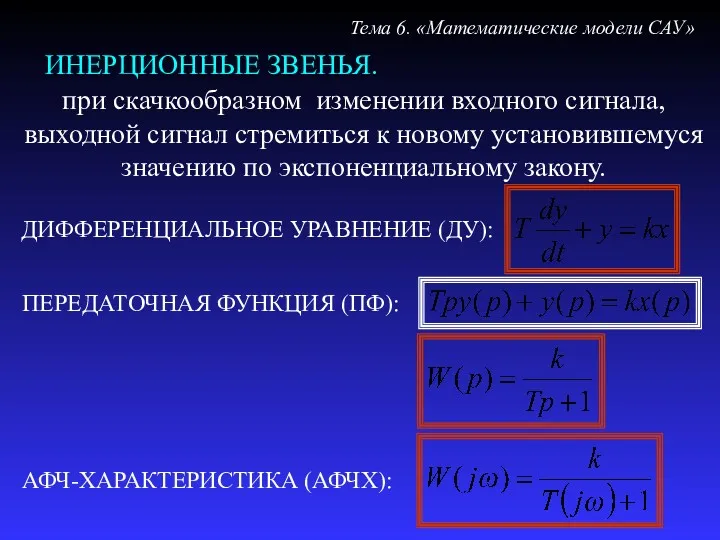
ИНЕРЦИОННЫЕ ЗВЕНЬЯ.
Тема 6. «Математические модели САУ»
при скачкообразном изменении входного сигнала, выходной
ИНЕРЦИОННЫЕ ЗВЕНЬЯ.
Тема 6. «Математические модели САУ»
при скачкообразном изменении входного сигнала, выходной
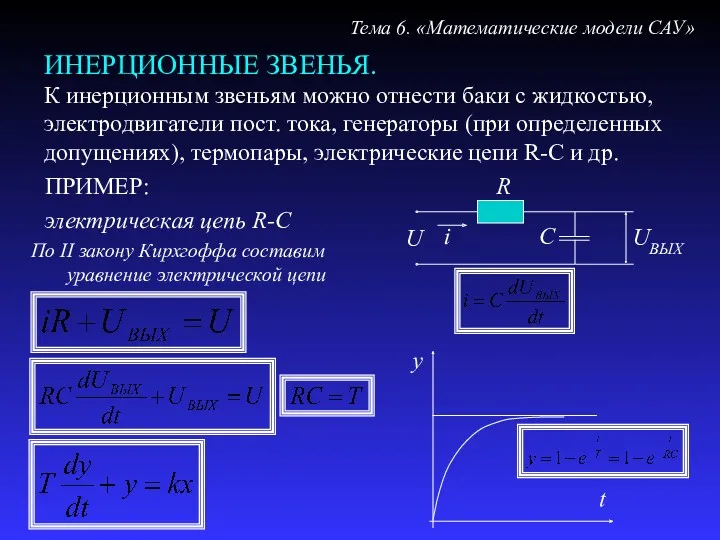
ИНЕРЦИОННЫЕ ЗВЕНЬЯ.
Тема 6. «Математические модели САУ»
К инерционным звеньям можно отнести баки
ИНЕРЦИОННЫЕ ЗВЕНЬЯ.
Тема 6. «Математические модели САУ»
К инерционным звеньям можно отнести баки
КОЛЕБАТЕЛЬНЫЕ ЗВЕНЬЯ.
Тема 6. «Математические модели САУ»
при скачкообразном изменении входного сигнала, выходной
КОЛЕБАТЕЛЬНЫЕ ЗВЕНЬЯ.
Тема 6. «Математические модели САУ»
при скачкообразном изменении входного сигнала, выходной
КОЛЕБАТЕЛЬНЫЕ ЗВЕНЬЯ.
Тема 6. «Математические модели САУ»
К колебательным звеньям можно отнести объекты,
КОЛЕБАТЕЛЬНЫЕ ЗВЕНЬЯ.
Тема 6. «Математические модели САУ»
К колебательным звеньям можно отнести объекты,
ДИФФЕРЕНЦИРУЮЩИЕ ЗВЕНЬЯ.
Тема 6. «Математические модели САУ»
Выходной сигнал пропорционален скорости
изменения входного
ДИФФЕРЕНЦИРУЮЩИЕ ЗВЕНЬЯ.
Тема 6. «Математические модели САУ»
Выходной сигнал пропорционален скорости изменения входного
ИНТЕГРИРУЮЩИЕ ЗВЕНЬЯ.
Тема 6. «Математические модели САУ»
звено, в котором выходная величина пропорциональна
ИНТЕГРИРУЮЩИЕ ЗВЕНЬЯ.
Тема 6. «Математические модели САУ»
звено, в котором выходная величина пропорциональна
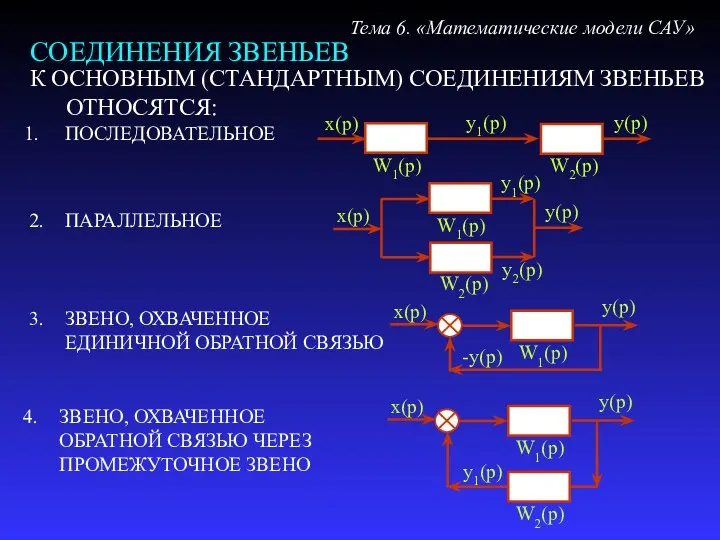
СОЕДИНЕНИЯ ЗВЕНЬЕВ
Тема 6. «Математические модели САУ»
К ОСНОВНЫМ (СТАНДАРТНЫМ) СОЕДИНЕНИЯМ ЗВЕНЬЕВ ОТНОСЯТСЯ:
4. ЗВЕНО,
СОЕДИНЕНИЯ ЗВЕНЬЕВ
Тема 6. «Математические модели САУ»
К ОСНОВНЫМ (СТАНДАРТНЫМ) СОЕДИНЕНИЯМ ЗВЕНЬЕВ ОТНОСЯТСЯ:
4. ЗВЕНО,
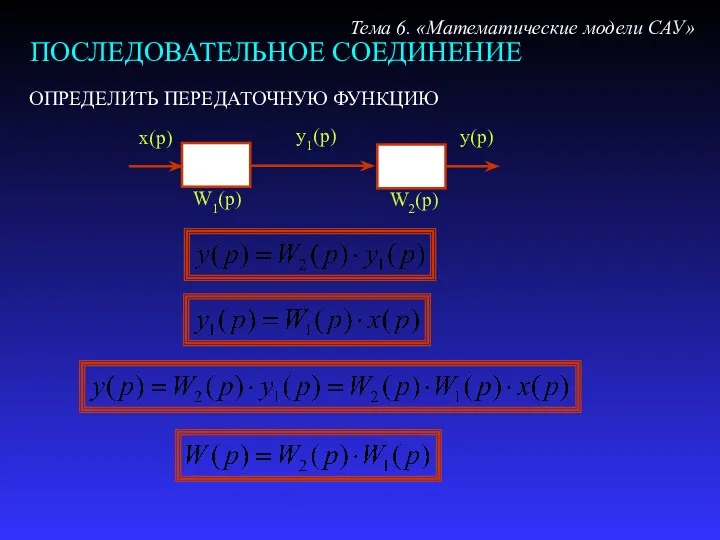
ПОСЛЕДОВАТЕЛЬНОЕ СОЕДИНЕНИЕ
Тема 6. «Математические модели САУ»
ОПРЕДЕЛИТЬ ПЕРЕДАТОЧНУЮ ФУНКЦИЮ
ПОСЛЕДОВАТЕЛЬНОЕ СОЕДИНЕНИЕ
Тема 6. «Математические модели САУ»
ОПРЕДЕЛИТЬ ПЕРЕДАТОЧНУЮ ФУНКЦИЮ
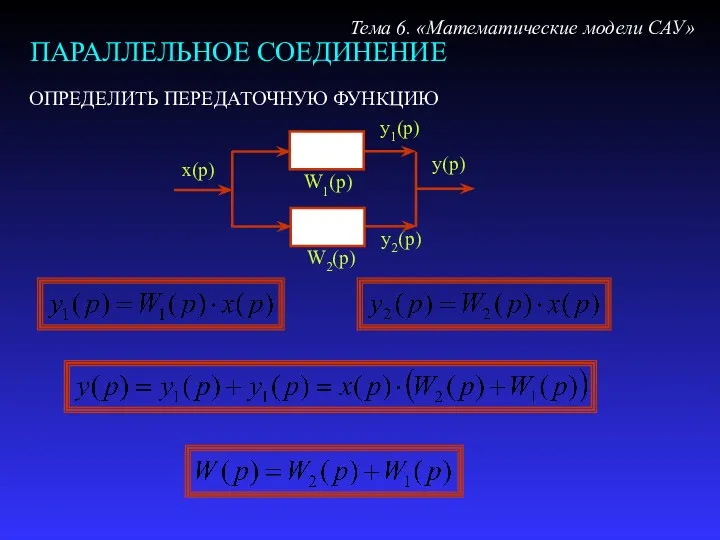
ПАРАЛЛЕЛЬНОЕ СОЕДИНЕНИЕ
Тема 6. «Математические модели САУ»
ОПРЕДЕЛИТЬ ПЕРЕДАТОЧНУЮ ФУНКЦИЮ
ПАРАЛЛЕЛЬНОЕ СОЕДИНЕНИЕ
Тема 6. «Математические модели САУ»
ОПРЕДЕЛИТЬ ПЕРЕДАТОЧНУЮ ФУНКЦИЮ
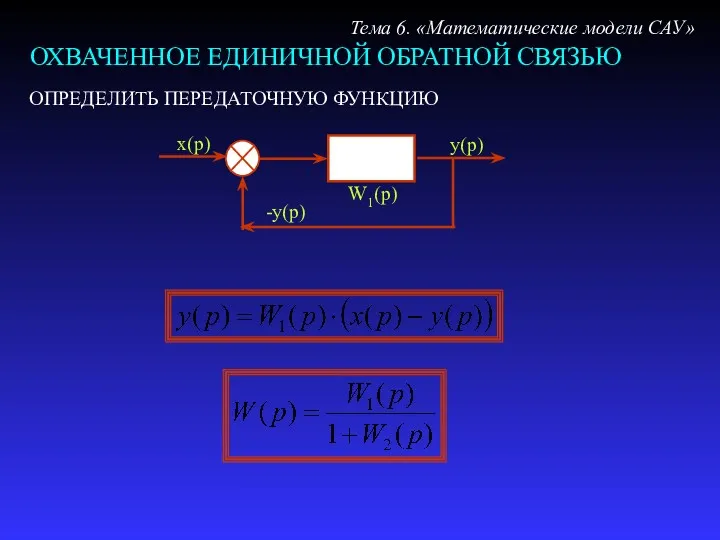
ОХВАЧЕННОЕ ЕДИНИЧНОЙ ОБРАТНОЙ СВЯЗЬЮ
Тема 6. «Математические модели САУ»
ОПРЕДЕЛИТЬ ПЕРЕДАТОЧНУЮ ФУНКЦИЮ
ОХВАЧЕННОЕ ЕДИНИЧНОЙ ОБРАТНОЙ СВЯЗЬЮ
Тема 6. «Математические модели САУ»
ОПРЕДЕЛИТЬ ПЕРЕДАТОЧНУЮ ФУНКЦИЮ
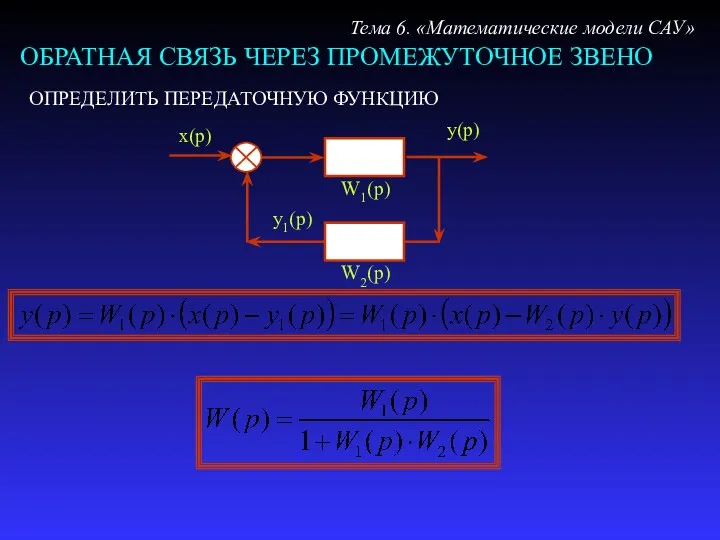
ОБРАТНАЯ СВЯЗЬ ЧЕРЕЗ ПРОМЕЖУТОЧНОЕ ЗВЕНО
Тема 6. «Математические модели САУ»
ОПРЕДЕЛИТЬ ПЕРЕДАТОЧНУЮ ФУНКЦИЮ
ОБРАТНАЯ СВЯЗЬ ЧЕРЕЗ ПРОМЕЖУТОЧНОЕ ЗВЕНО
Тема 6. «Математические модели САУ»
ОПРЕДЕЛИТЬ ПЕРЕДАТОЧНУЮ ФУНКЦИЮ
ТЕХНОЛОГИЯ ПОЛУЧЕНИЯ МАТЕМАТИЧЕСКОЙ МОДЕЛИ АВТОМАТИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ
Тема 6. «Математические модели САУ»
Для
ТЕХНОЛОГИЯ ПОЛУЧЕНИЯ МАТЕМАТИЧЕСКОЙ МОДЕЛИ АВТОМАТИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ
Тема 6. «Математические модели САУ»
Для

ПРИМЕР ПОЛУЧЕНИЯ МАТЕМАТИЧЕСКОЙ МОДЕЛИ АВТОМАТИЧЕСКОЙ СИСТЕМЫ
Тема 6. «Математические модели САУ»
САУ регулирования
ПРИМЕР ПОЛУЧЕНИЯ МАТЕМАТИЧЕСКОЙ МОДЕЛИ АВТОМАТИЧЕСКОЙ СИСТЕМЫ
Тема 6. «Математические модели САУ»
САУ регулирования
Выходной параметр –
СОСТАВЛЯЕМ БЛОК-СХЕМУ САУ генератора
Тема 6. «Математические модели САУ»
Uг
Выходной параметр –
СОСТАВЛЯЕМ БЛОК-СХЕМУ САУ генератора
Тема 6. «Математические модели САУ»
Uг
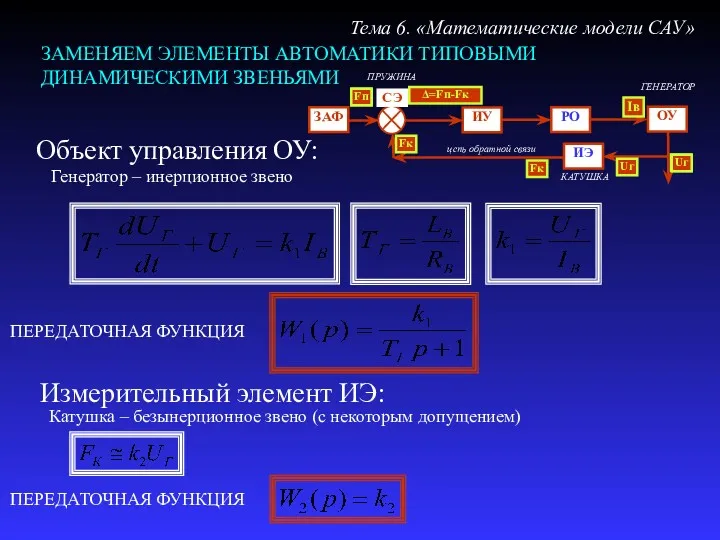
ЗАМЕНЯЕМ ЭЛЕМЕНТЫ АВТОМАТИКИ ТИПОВЫМИ ДИНАМИЧЕСКИМИ ЗВЕНЬЯМИ
Тема 6. «Математические модели САУ»
Объект управления
ЗАМЕНЯЕМ ЭЛЕМЕНТЫ АВТОМАТИКИ ТИПОВЫМИ ДИНАМИЧЕСКИМИ ЗВЕНЬЯМИ
Тема 6. «Математические модели САУ»
Объект управления
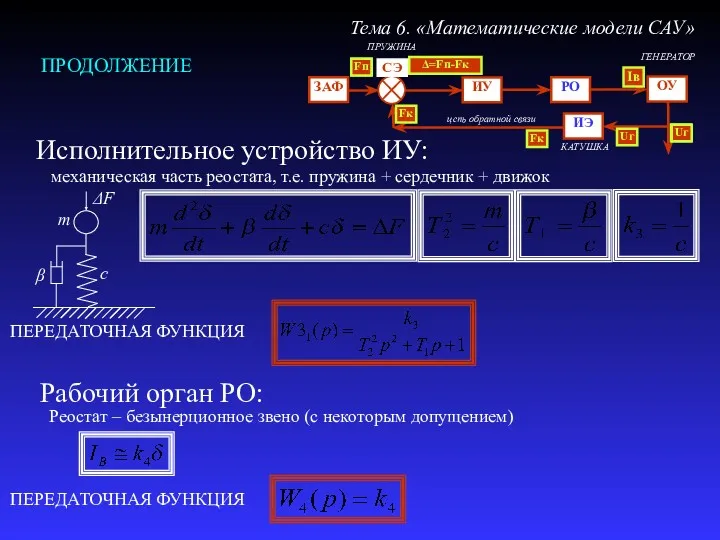
ПРОДОЛЖЕНИЕ
Тема 6. «Математические модели САУ»
Исполнительное устройство ИУ:
Реостат – безынерционное звено
ПРОДОЛЖЕНИЕ
Тема 6. «Математические модели САУ»
Исполнительное устройство ИУ:
Реостат – безынерционное звено
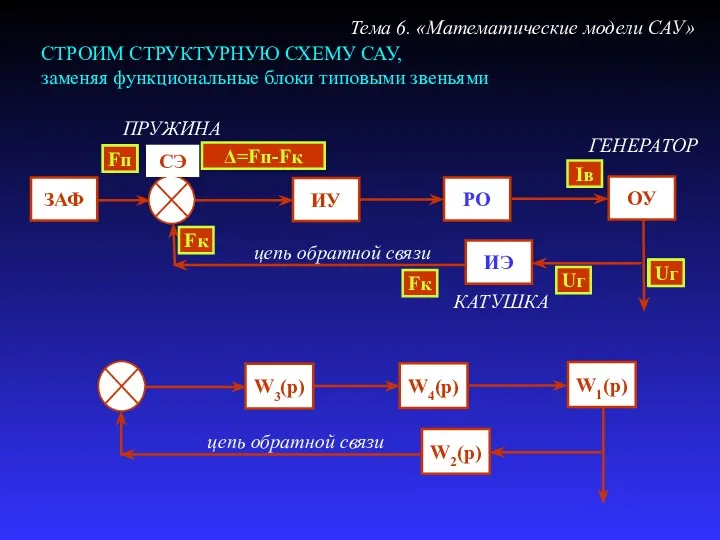
СТРОИМ СТРУКТУРНУЮ СХЕМУ САУ,
заменяя функциональные блоки типовыми звеньями
Тема 6. «Математические
СТРОИМ СТРУКТУРНУЮ СХЕМУ САУ,
заменяя функциональные блоки типовыми звеньями
Тема 6. «Математические
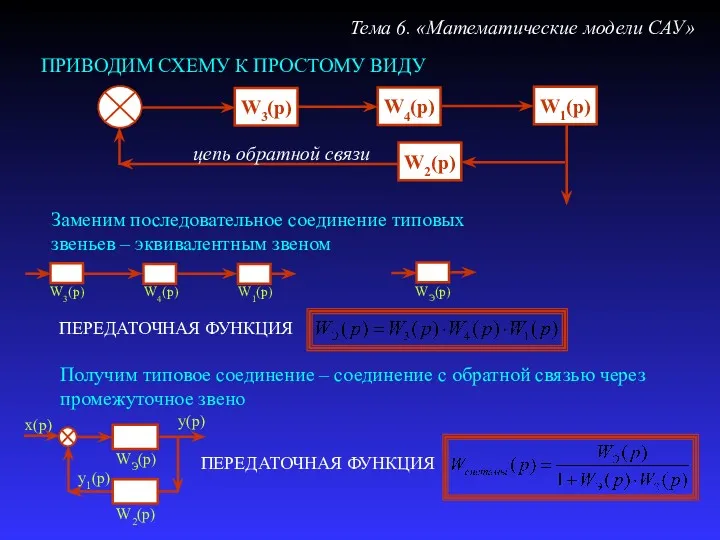
ПРИВОДИМ СХЕМУ К ПРОСТОМУ ВИДУ
Тема 6. «Математические модели САУ»
Получим типовое соединение
ПРИВОДИМ СХЕМУ К ПРОСТОМУ ВИДУ
Тема 6. «Математические модели САУ»
Получим типовое соединение
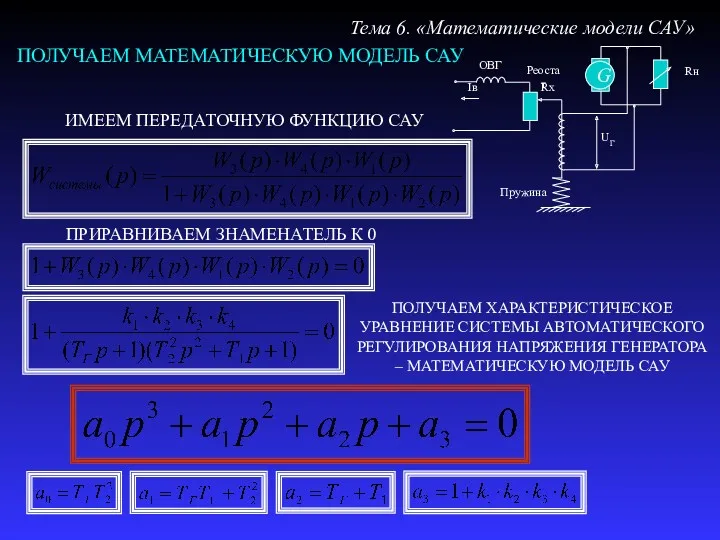
ПОЛУЧАЕМ МАТЕМАТИЧЕСКУЮ МОДЕЛЬ САУ
Тема 6. «Математические модели САУ»
ИМЕЕМ ПЕРЕДАТОЧНУЮ ФУНКЦИЮ САУ
ПРИРАВНИВАЕМ
ПОЛУЧАЕМ МАТЕМАТИЧЕСКУЮ МОДЕЛЬ САУ
Тема 6. «Математические модели САУ»
ИМЕЕМ ПЕРЕДАТОЧНУЮ ФУНКЦИЮ САУ
ПРИРАВНИВАЕМ
ПРИМЕНЕНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ
Тема 6. «Математические модели САУ»
МАТЕМАТИЧЕСКУЮ МОДЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯ ПРМИЕНЯЮТ
ПРИМЕНЕНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ
Тема 6. «Математические модели САУ»
МАТЕМАТИЧЕСКУЮ МОДЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯ ПРМИЕНЯЮТ
Тема 6.1
УСТОЙЧИВОСТЬ АВТОМАТИЧЕСКИХ СИСТЕМ
Тема 6. «Математические модели САУ»
Тема 6.1
УСТОЙЧИВОСТЬ АВТОМАТИЧЕСКИХ СИСТЕМ
Тема 6. «Математические модели САУ»
Устойчивость –
свойство возвращаться в состояние устойчивого равновесия после снятия возмущения,
Устойчивость –
свойство возвращаться в состояние устойчивого равновесия после снятия возмущения,
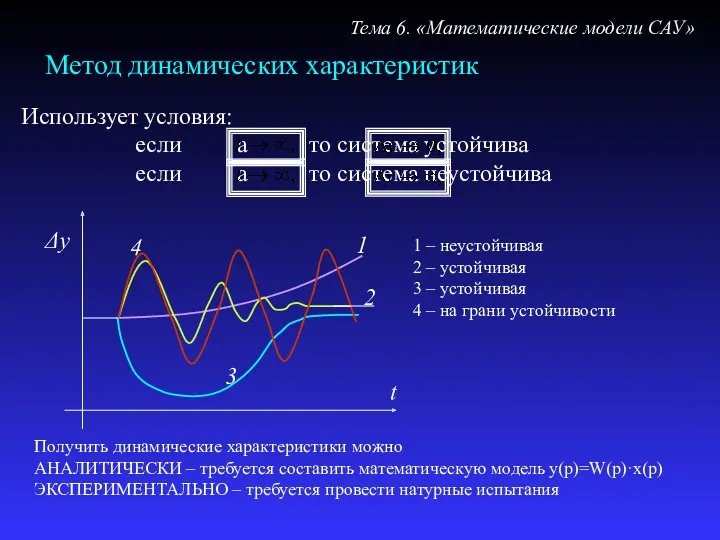
Метод динамических характеристик
Тема 6. «Математические модели САУ»
t
Δy
1
2
3
4
1 – неустойчивая
2 – устойчивая
3
Метод динамических характеристик
Тема 6. «Математические модели САУ»
t
Δy
1
2
3
4
1 – неустойчивая
2 – устойчивая
3
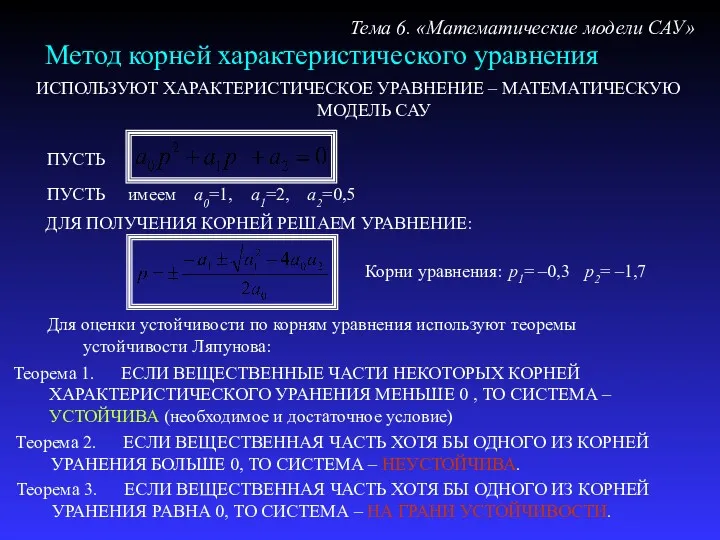
Метод корней характеристического уравнения
Тема 6. «Математические модели САУ»
ИСПОЛЬЗУЮТ ХАРАКТЕРИСТИЧЕСКОЕ УРАВНЕНИЕ –
Метод корней характеристического уравнения
Тема 6. «Математические модели САУ»
ИСПОЛЬЗУЮТ ХАРАКТЕРИСТИЧЕСКОЕ УРАВНЕНИЕ –
Специальные критерии устойчивости систем
Тема 6. «Математические модели САУ»
Алгебраические критерии:
критерий Гурвица,
критерий
Специальные критерии устойчивости систем
Тема 6. «Математические модели САУ»
Алгебраические критерии:
критерий Гурвица,
критерий
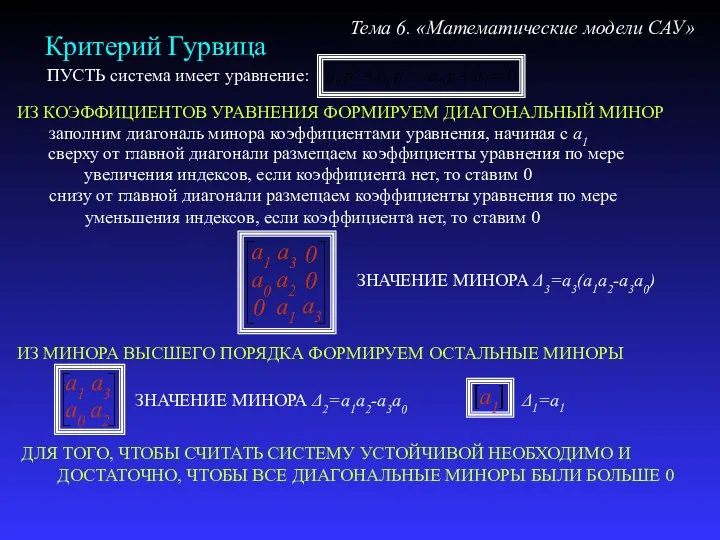
Критерий Гурвица
Тема 6. «Математические модели САУ»
ИЗ КОЭФФИЦИЕНТОВ УРАВНЕНИЯ ФОРМИРУЕМ ДИАГОНАЛЬНЫЙ МИНОР
заполним
Критерий Гурвица
Тема 6. «Математические модели САУ»
ИЗ КОЭФФИЦИЕНТОВ УРАВНЕНИЯ ФОРМИРУЕМ ДИАГОНАЛЬНЫЙ МИНОР
заполним
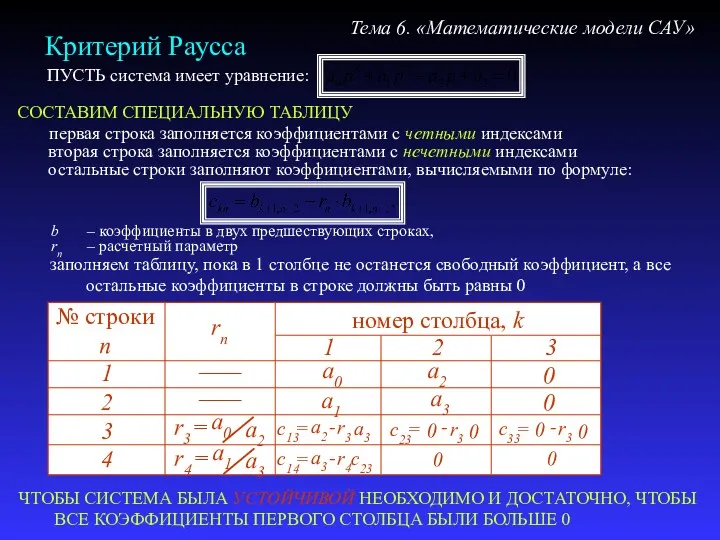
Критерий Раусса
Тема 6. «Математические модели САУ»
СОСТАВИМ СПЕЦИАЛЬНУЮ ТАБЛИЦУ
первая строка заполняется коэффициентами
Критерий Раусса
Тема 6. «Математические модели САУ»
СОСТАВИМ СПЕЦИАЛЬНУЮ ТАБЛИЦУ
первая строка заполняется коэффициентами
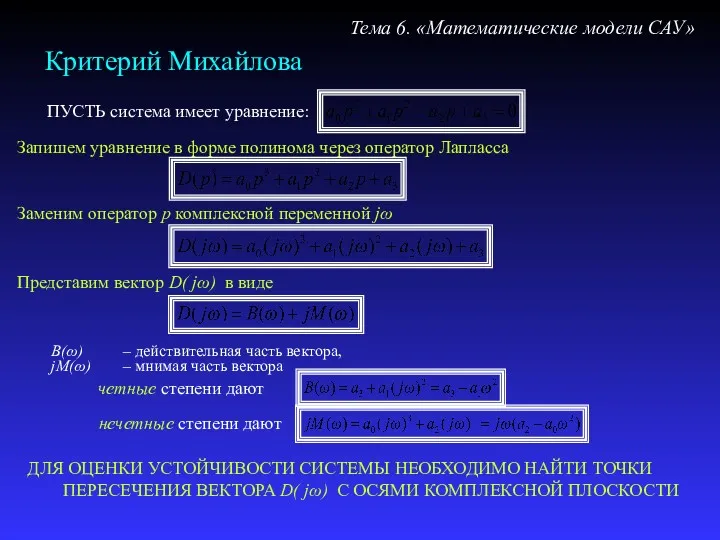
Критерий Михайлова
Тема 6. «Математические модели САУ»
Запишем уравнение в форме полинома через
Критерий Михайлова
Тема 6. «Математические модели САУ»
Запишем уравнение в форме полинома через
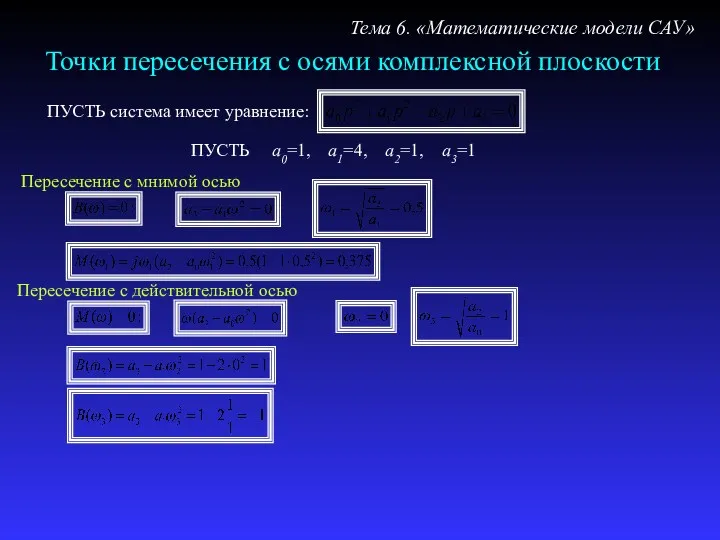
Точки пересечения с осями комплексной плоскости
Тема 6. «Математические модели САУ»
Пересечение с
Точки пересечения с осями комплексной плоскости
Тема 6. «Математические модели САУ»
Пересечение с
 Решение задач на составление уравнений
Решение задач на составление уравнений График линейного уравнения с двумя переменными
График линейного уравнения с двумя переменными Конус. Конусы вокруг нас
Конус. Конусы вокруг нас Презентации Состав чисел от 1 до 10
Презентации Состав чисел от 1 до 10 Тела вращения. Площади поверхности и объёмы
Тела вращения. Площади поверхности и объёмы Множества. Последовательность
Множества. Последовательность Игра Что? Где? Когда? по математике. (10 класс)
Игра Что? Где? Когда? по математике. (10 класс) Урок математики в 1 классе Двузначные числа. Чтение и запись.Закрепление УМК Гармония
Урок математики в 1 классе Двузначные числа. Чтение и запись.Закрепление УМК Гармония Длина окружности
Длина окружности ЕГЭ профиль: задание 9. Графики и функции
ЕГЭ профиль: задание 9. Графики и функции Сложение и вычитание в пределах 20
Сложение и вычитание в пределах 20 Презентация Арифметические диктанты 2 класс.
Презентация Арифметические диктанты 2 класс. Степени с действительным показателем. Степень с натуральным показателем
Степени с действительным показателем. Степень с натуральным показателем Сложение чисел. Сложение вида □+6, Сложение вида □+7
Сложение чисел. Сложение вида □+6, Сложение вида □+7 Контрольная работа по математике 4 класс
Контрольная работа по математике 4 класс Исследование расположения корней квадратного трехчлена
Исследование расположения корней квадратного трехчлена Комбинаторное правило умножения. Урок №2
Комбинаторное правило умножения. Урок №2 РАЗВИТИЯ МАТЕМАТИЧЕСКИХ ПРЕДСТАВЛЕНИЙ У ДОШКОЛЬНИКОВ В СВЕТЕ РЕАЛИЗАЦИИ ФЕДЕРАЛЬНЫХ ГОСУДАРСТВЕННЫХ ОБРАЗОВАТЕЛЬНЫХ СТАНДАРТОВ ДОШКОЛЬНОГО ОБРАЗОВАНИЯ
РАЗВИТИЯ МАТЕМАТИЧЕСКИХ ПРЕДСТАВЛЕНИЙ У ДОШКОЛЬНИКОВ В СВЕТЕ РЕАЛИЗАЦИИ ФЕДЕРАЛЬНЫХ ГОСУДАРСТВЕННЫХ ОБРАЗОВАТЕЛЬНЫХ СТАНДАРТОВ ДОШКОЛЬНОГО ОБРАЗОВАНИЯ Случаи деления, когда делитель больше делимого
Случаи деления, когда делитель больше делимого Арифметическая прогрессия
Арифметическая прогрессия Тест по математике для 4 класса(Программа Школа России)
Тест по математике для 4 класса(Программа Школа России) Логика и основы алгоритмизации инженерных задач
Логика и основы алгоритмизации инженерных задач Математика. Изучение нового материала.
Математика. Изучение нового материала. Прогрессии и их применение в жизни
Прогрессии и их применение в жизни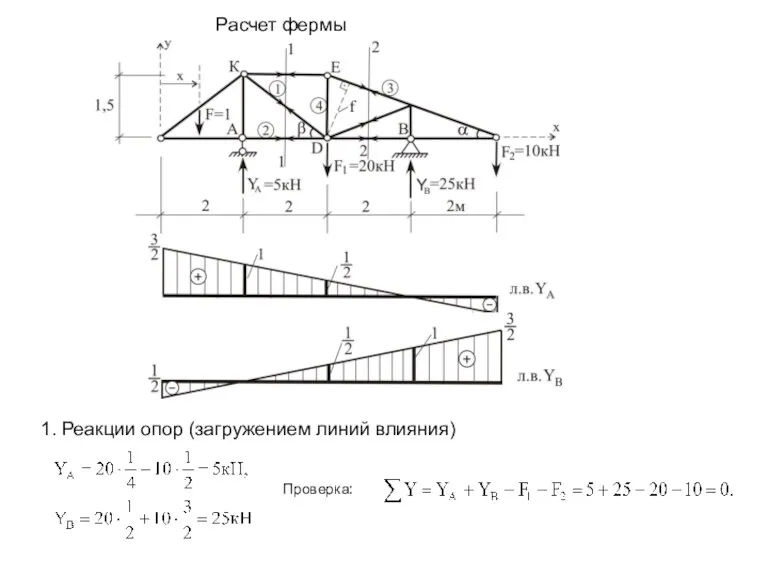 Расчет фермы
Расчет фермы Структура исследовательского проекта по математике
Структура исследовательского проекта по математике Решение дробных рациональных уравнений
Решение дробных рациональных уравнений Уравнения, приводимые к квадратным acosx +b cosx + c = 0
Уравнения, приводимые к квадратным acosx +b cosx + c = 0