- Решение системы линейных уравнений

Содержание
- 2. Системой линейных алгебраических уравнений (СЛАУ) называется система вида: Сокращенно это можно записать как
- 3. Или в сокращенной покомпонентной записи: Упорядоченный набор значений {x1 ,x2,..,xn } называется решением системы, если при
- 4. СЛАУ называется совместной, если она имеет, хотя бы одно решение. В противном случае система называется несовместной.
- 5. Система называется однородной, если все правые части уравнений, входящих в нее, равны нулю. Система называется квадратной,
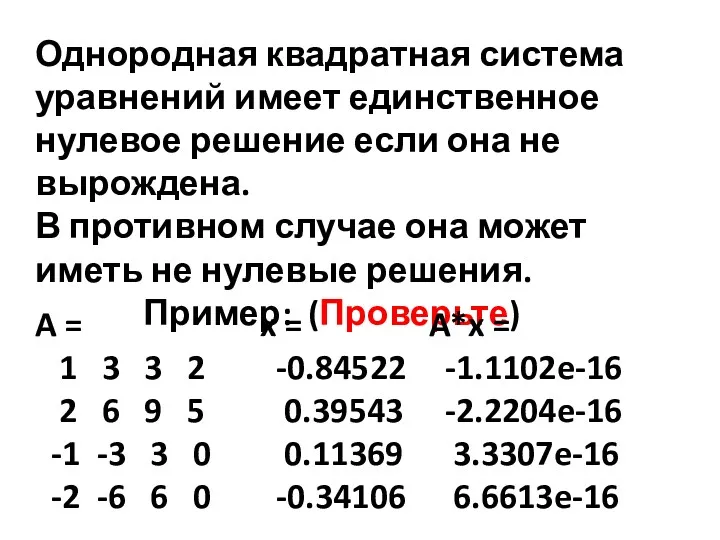
- 6. Однородная квадратная система уравнений имеет единственное нулевое решение если она не вырождена. В противном случае она
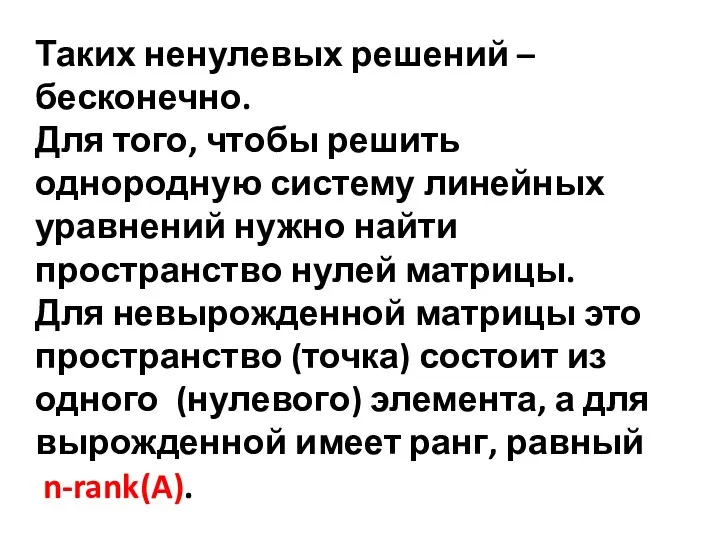
- 7. Таких ненулевых решений – бесконечно. Для того, чтобы решить однородную систему линейных уравнений нужно найти пространство
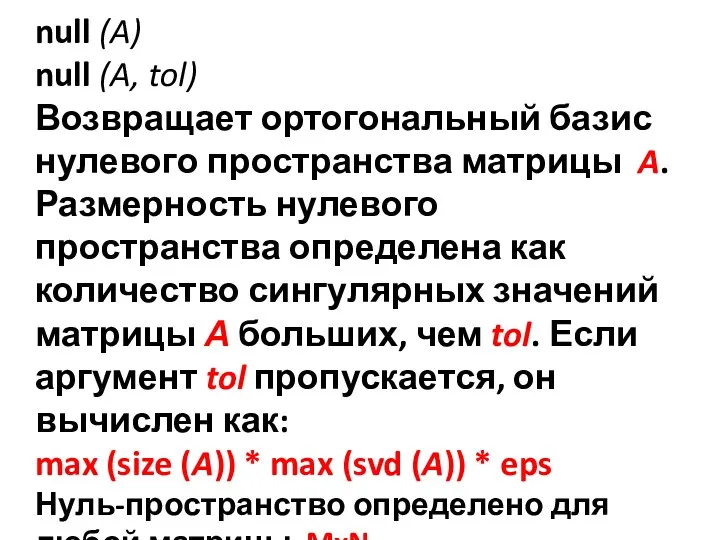
- 8. null (A) null (A, tol) Возвращает ортогональный базис нулевого пространства матрицы A. Размерность нулевого пространства определена
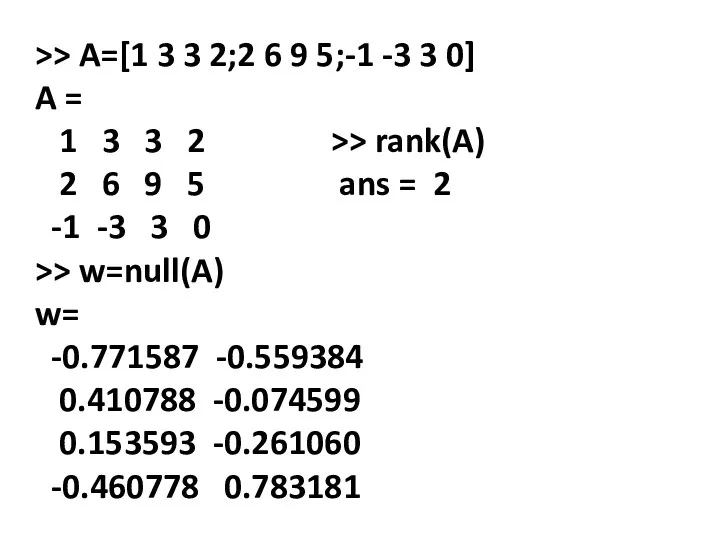
- 9. >> A=[1 3 3 2;2 6 9 5;-1 -3 3 0] A = 1 3 3
- 10. A*w ans = 1.1102e-16 6.6613e-16 1.7764e-15 1.7764e-15 3.0531e-15 1.1102e-16
- 11. >> A2=[1 2 3;4 5 6;7 8 9] A2 = 1 2 3 4 5 6
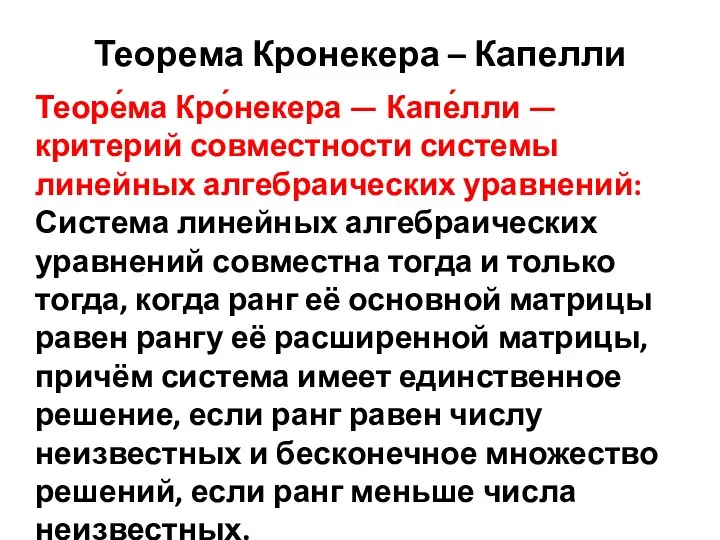
- 12. Теорема Кронекера – Капелли Теоре́ма Кро́некера — Капе́лли — критерий совместности системы линейных алгебраических уравнений: Система
- 13. A3 = 1 3 3 2 1 2 6 9 5 -1 -1 -3 3 0
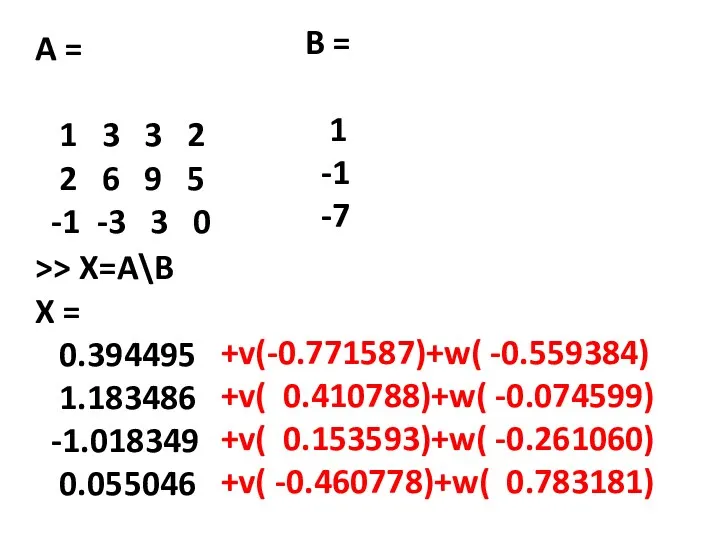
- 14. A = 1 3 3 2 2 6 9 5 -1 -3 3 0 B =
- 15. >> B=A*X B = В – восстановлен! 1.00000 -1.00000 -7.00000
- 16. A = 1 3 3 2 2 6 9 5 -1 -3 3 0 B =
- 17. Обращение прямоугольных матриц. Псевдообратная матрица Если A— квадратная и неособенная матрица, то для нее существует обратная
- 18. В случае, когда A— квадратная неособенная матрица, псевдообратная матрица A+ совпадает с обратной A-1. Свойства псевдообратной
- 19. Если Ax=b несовместная система линейных алгебраических уравнений, то решая его с помощью псевдообратной матрицы получим приближенное
- 20. Для вычисления псевдообратной матрицы используется функция: pinv (x) pinv (x, tol) Сингулярные значения матрицы А меньшие,
- 21. >> A2=[1 2 3;4 5 6;7 8 9] A2 = >> rank(A2) 1 2 3 ans
- 22. >> AR=[A2 [1;1;1]] AR = 1 2 3 1 4 5 6 1 7 8 9
- 23. >> AR=[A2 [1;1;0]] AR = 1 2 3 1 4 5 6 1 7 8 9
- 24. Таким образом, для численного решения системы линейных уравнений можно применять оператор «\», то есть систему Ах=b,
- 25. Собственные значения и собственные векторы квадратной матрицы Задача на собственные значения для квадратной матрицы имеет вид:
- 26. Совокупность всех собственных векторов, относящихся к одному и тому же собственному значению, вместе с нулевым вектором,
- 27. Матрица А приводима к диагональному виду тогда и только тогда, когда существует базис в n-мерном пространстве,
- 28. Матрица А называется неотрицательно определенной, если: Для любого вектора Х Матрица А называется симметрической, если: Ан
- 29. [V, lambda] = eig (A) – вычисление матрицы собственных векторов (V) и диагональной матрицы собственных значений
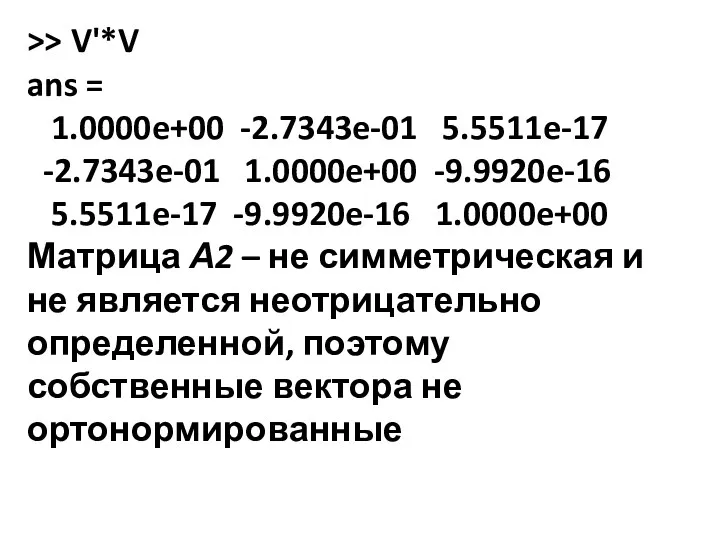
- 30. >> V'*V ans = 1.0000e+00 -2.7343e-01 5.5511e-17 -2.7343e-01 1.0000e+00 -9.9920e-16 5.5511e-17 -9.9920e-16 1.0000e+00 Матрица А2 –
- 31. Теплицева матрица На всех диагоналях одинаковые значения
- 32. toeplitz (c) toeplitz (c, r) Возвращает матрицу Теплица созданную из вектора c (в первом случае). Во
- 33. Создадим матрицу >> r=0.9; >> n=5;a=(0:n-1).^2; >> c=r.^a; >> K=toeplitz (c) K = 1.00000 0.90000 0.65610
- 34. Найдем собственные вектора и собственные значения этой матрицы >> [V,D]=eig(K); V = -1.6166e-01 3.8166e-01 5.7288e-01 -5.9526e-01
- 35. >> V'*V ans = 1.0000e+00 1.1102e-16 6.9389e-17 -4.1633e-17 -9.0206e-17 1.1102e-16 1.0000e+00 -1.6653e-16 5.5511e-17 5.5511e-17 6.9389e-17 -1.6653e-16
- 36. Большую роль в линейной алгебре играют сингулярные числа матрицы. Собственные значения введены для квадратных матриц, а
- 37. s = svd (A) [U, S, V] = svd (A) Эта функция вычисляет факторизацию матрицы А(mxn)
- 38. Выполнить факторизацию матриц: A=[1 2 3;4 5 6;7 8 9] B=[1 2 3;2 3 4 ;3
- 39. A = 1 3 3 2 2 6 9 5 -1 -3 3 0 >> [U
- 40. V = -0.168187 -0.251905 -0.771587 -0.559384 -0.504560 -0.755716 0.410788 -0.074599 -0.738535 0.602348 0.153593 -0.261060 -0.414365 -0.051123
- 42. Скачать презентацию
Системой линейных алгебраических уравнений (СЛАУ) называется система вида:
Сокращенно это можно записать как
Системой линейных алгебраических уравнений (СЛАУ) называется система вида:
Сокращенно это можно записать как
Или в сокращенной покомпонентной записи:
Упорядоченный набор значений {x1 ,x2,..,xn }
называется решением
Или в сокращенной покомпонентной записи:
Упорядоченный набор значений {x1 ,x2,..,xn }
называется решением
СЛАУ называется совместной, если она имеет, хотя бы одно решение.
В противном случае
СЛАУ называется совместной, если она имеет, хотя бы одно решение.
В противном случае
Система называется однородной, если все правые части уравнений, входящих в нее, равны
Система называется однородной, если все правые части уравнений, входящих в нее, равны
Однородная квадратная система уравнений имеет единственное нулевое решение если она не
Однородная квадратная система уравнений имеет единственное нулевое решение если она не
Таких ненулевых решений – бесконечно.
Для того, чтобы решить однородную систему линейных
Таких ненулевых решений – бесконечно.
Для того, чтобы решить однородную систему линейных
null (A)
null (A, tol)
Возвращает ортогональный базис нулевого пространства матрицы A.
Размерность нулевого
null (A)
null (A, tol)
Возвращает ортогональный базис нулевого пространства матрицы A.
Размерность нулевого
>> A=[1 3 3 2;2 6 9 5;-1 -3 3 0]
A
>> A=[1 3 3 2;2 6 9 5;-1 -3 3 0]
A
A*w
ans =
1.1102e-16 6.6613e-16
1.7764e-15 1.7764e-15
3.0531e-15 1.1102e-16
A*w
ans =
1.1102e-16 6.6613e-16
1.7764e-15 1.7764e-15
3.0531e-15 1.1102e-16
![>> A2=[1 2 3;4 5 6;7 8 9] A2 =](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/327666/slide-10.jpg)
>> A2=[1 2 3;4 5 6;7 8 9]
A2 =
1 2
>> A2=[1 2 3;4 5 6;7 8 9]
A2 =
1 2
Теорема Кронекера – Капелли
Теоре́ма Кро́некера — Капе́лли — критерий совместности системы линейных алгебраических
Теорема Кронекера – Капелли
Теоре́ма Кро́некера — Капе́лли — критерий совместности системы линейных алгебраических
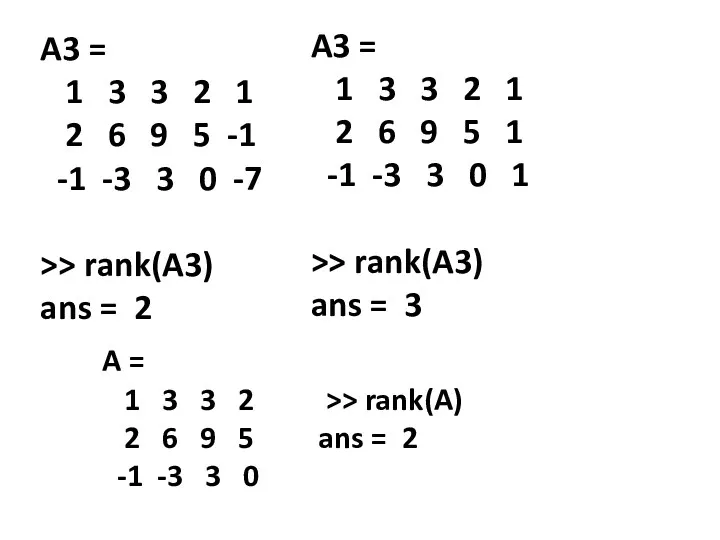
A3 =
1 3 3 2 1
2 6 9 5
A3 =
1 3 3 2 1
2 6 9 5
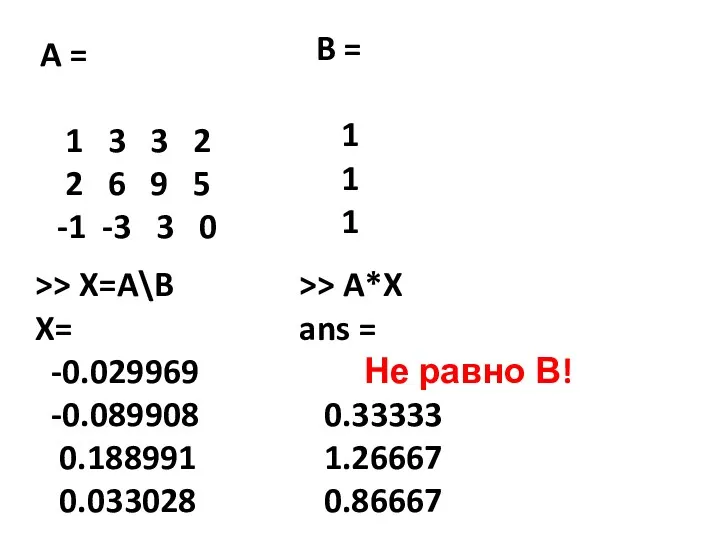
A =
1 3 3 2
2 6 9 5
-1
A =
1 3 3 2
2 6 9 5
-1
>> B=A*X
B =
В – восстановлен!
1.00000
-1.00000
-7.00000
>> B=A*X
B =
В – восстановлен!
1.00000
-1.00000
-7.00000
A =
1 3 3 2
2 6 9 5
-1
A =
1 3 3 2
2 6 9 5
-1
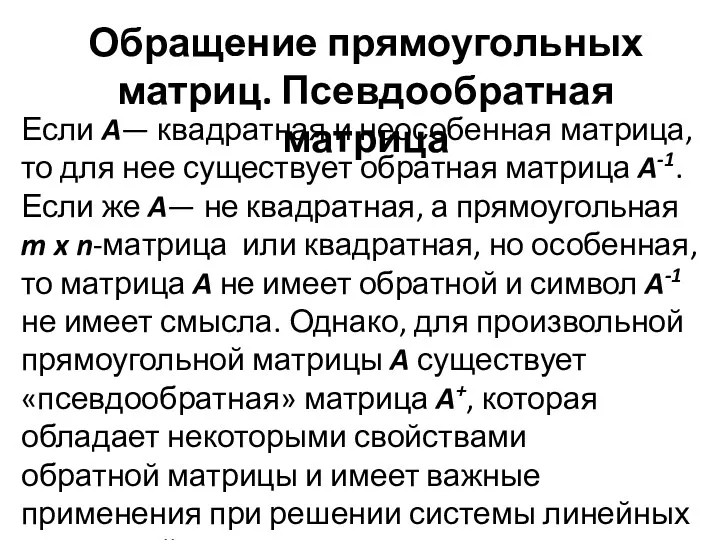
Обращение прямоугольных матриц. Псевдообратная матрица
Если A— квадратная и неособенная матрица, то
Обращение прямоугольных матриц. Псевдообратная матрица
Если A— квадратная и неособенная матрица, то
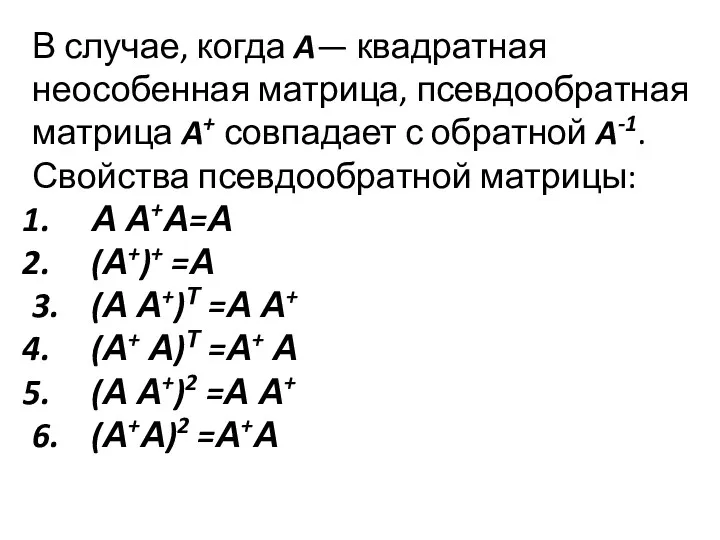
В случае, когда A— квадратная неособенная матрица, псевдообратная матрица A+ совпадает
В случае, когда A— квадратная неособенная матрица, псевдообратная матрица A+ совпадает
Если Ax=b несовместная система линейных алгебраических уравнений, то решая его с
Если Ax=b несовместная система линейных алгебраических уравнений, то решая его с
Для вычисления псевдообратной матрицы используется функция:
pinv (x)
pinv (x, tol)
Сингулярные значения матрицы
Для вычисления псевдообратной матрицы используется функция:
pinv (x)
pinv (x, tol)
Сингулярные значения матрицы
![>> A2=[1 2 3;4 5 6;7 8 9] A2 =](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/327666/slide-20.jpg)
>> A2=[1 2 3;4 5 6;7 8 9]
A2 = >> rank(A2)
>> A2=[1 2 3;4 5 6;7 8 9]
A2 = >> rank(A2)
![>> AR=[A2 [1;1;1]] AR = 1 2 3 1 4](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/327666/slide-21.jpg)
>> AR=[A2 [1;1;1]]
AR =
1 2 3 1
4 5 6
>> AR=[A2 [1;1;1]]
AR =
1 2 3 1
4 5 6
![>> AR=[A2 [1;1;0]] AR = 1 2 3 1 4](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/327666/slide-22.jpg)
>> AR=[A2 [1;1;0]]
AR =
1 2 3 1
4 5 6
>> AR=[A2 [1;1;0]]
AR =
1 2 3 1
4 5 6
Таким образом, для численного решения системы линейных уравнений можно применять оператор
Таким образом, для численного решения системы линейных уравнений можно применять оператор
Собственные значения и собственные векторы квадратной матрицы
Задача на собственные значения для
Собственные значения и собственные векторы квадратной матрицы
Задача на собственные значения для
Совокупность всех собственных векторов, относящихся к одному и тому же собственному
Совокупность всех собственных векторов, относящихся к одному и тому же собственному
Матрица А приводима к диагональному виду тогда и только тогда, когда
Матрица А приводима к диагональному виду тогда и только тогда, когда
Матрица А называется неотрицательно определенной, если:
Для любого вектора Х
Матрица А
Матрица А называется неотрицательно определенной, если:
Для любого вектора Х
Матрица А
![[V, lambda] = eig (A) – вычисление матрицы собственных векторов](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/327666/slide-28.jpg)
[V, lambda] = eig (A) – вычисление матрицы собственных векторов (V)
[V, lambda] = eig (A) – вычисление матрицы собственных векторов (V)
>> V'*V
ans =
1.0000e+00 -2.7343e-01 5.5511e-17
-2.7343e-01 1.0000e+00 -9.9920e-16
5.5511e-17 -9.9920e-16
>> V'*V
ans =
1.0000e+00 -2.7343e-01 5.5511e-17
-2.7343e-01 1.0000e+00 -9.9920e-16
5.5511e-17 -9.9920e-16

Теплицева матрица
На всех диагоналях одинаковые значения
Теплицева матрица
На всех диагоналях одинаковые значения
toeplitz (c)
toeplitz (c, r)
Возвращает матрицу Теплица созданную из вектора c (в
toeplitz (c)
toeplitz (c, r)
Возвращает матрицу Теплица созданную из вектора c (в
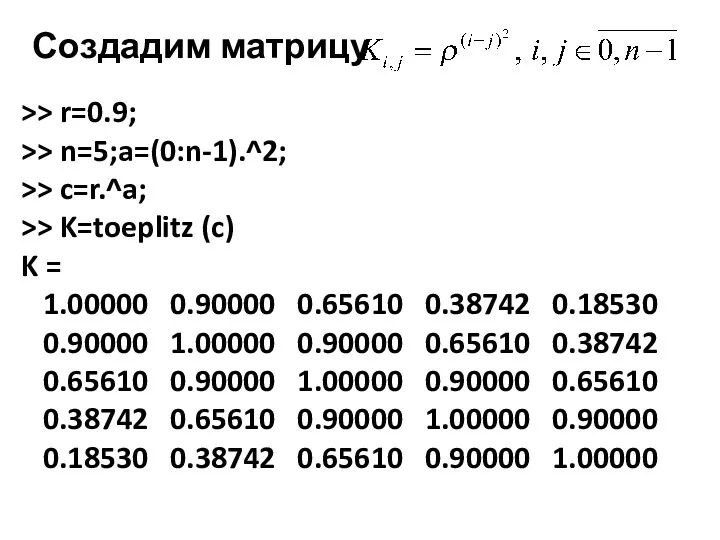
Создадим матрицу
>> r=0.9;
>> n=5;a=(0:n-1).^2;
>> c=r.^a;
>> K=toeplitz (c)
K =
1.00000 0.90000
Создадим матрицу
>> r=0.9;
>> n=5;a=(0:n-1).^2;
>> c=r.^a;
>> K=toeplitz (c)
K =
1.00000 0.90000
![Найдем собственные вектора и собственные значения этой матрицы >> [V,D]=eig(K);](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/327666/slide-33.jpg)
Найдем собственные вектора и собственные значения этой матрицы
>> [V,D]=eig(K);
V =
-1.6166e-01
Найдем собственные вектора и собственные значения этой матрицы
>> [V,D]=eig(K);
V =
-1.6166e-01
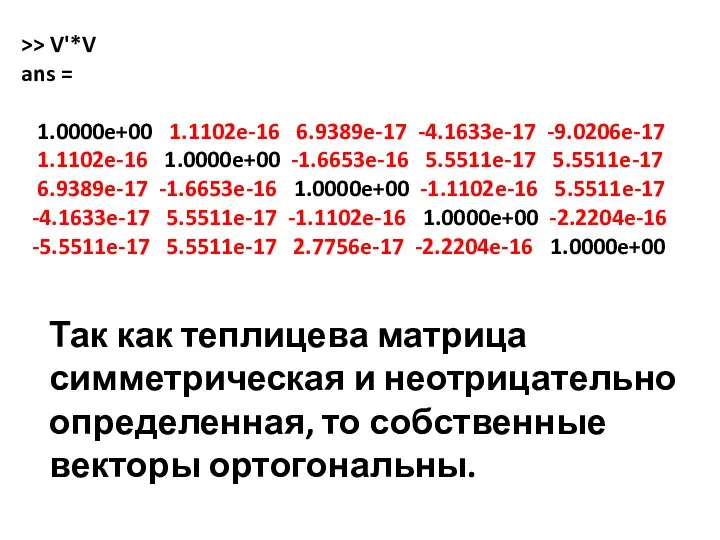
>> V'*V
ans =
1.0000e+00 1.1102e-16 6.9389e-17 -4.1633e-17 -9.0206e-17
1.1102e-16 1.0000e+00 -1.6653e-16
>> V'*V
ans =
1.0000e+00 1.1102e-16 6.9389e-17 -4.1633e-17 -9.0206e-17
1.1102e-16 1.0000e+00 -1.6653e-16
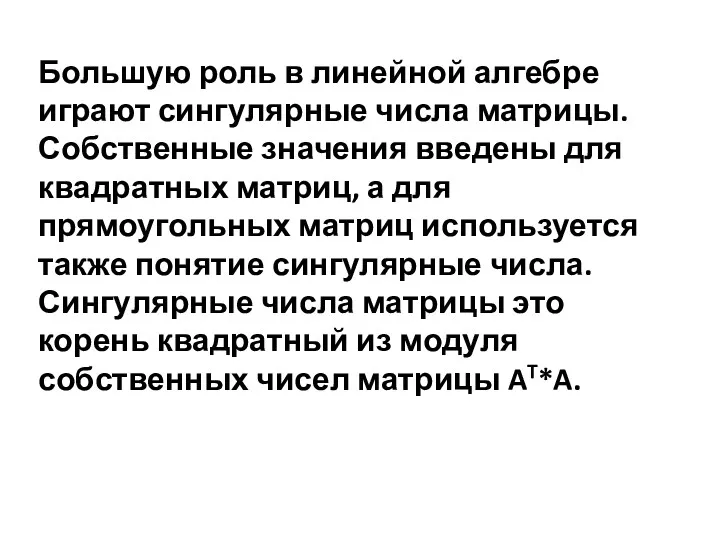
Большую роль в линейной алгебре играют сингулярные числа матрицы.
Собственные значения введены
Большую роль в линейной алгебре играют сингулярные числа матрицы.
Собственные значения введены
![s = svd (A) [U, S, V] = svd (A)](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/327666/slide-36.jpg)
s = svd (A)
[U, S, V] = svd (A)
Эта функция вычисляет
s = svd (A)
[U, S, V] = svd (A)
Эта функция вычисляет
![Выполнить факторизацию матриц: A=[1 2 3;4 5 6;7 8 9]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/327666/slide-37.jpg)
Выполнить факторизацию матриц:
A=[1 2 3;4 5 6;7 8 9] B=[1 2
Выполнить факторизацию матриц:
A=[1 2 3;4 5 6;7 8 9] B=[1 2
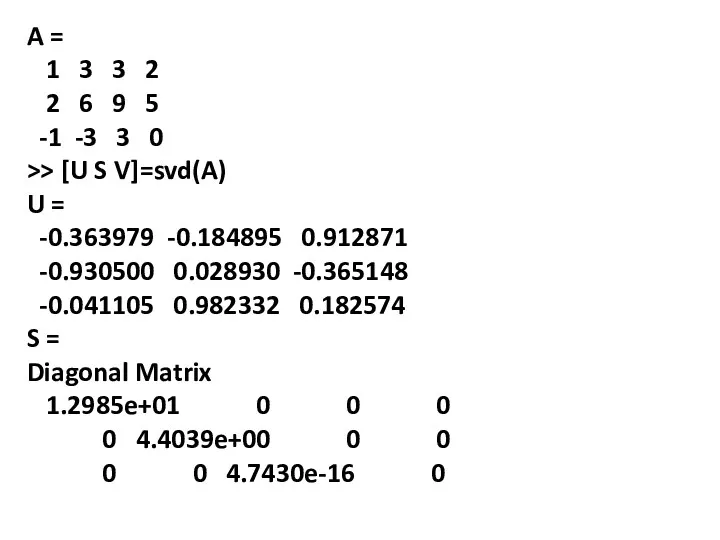
A =
1 3 3 2
2 6 9 5
-1
A =
1 3 3 2
2 6 9 5
-1
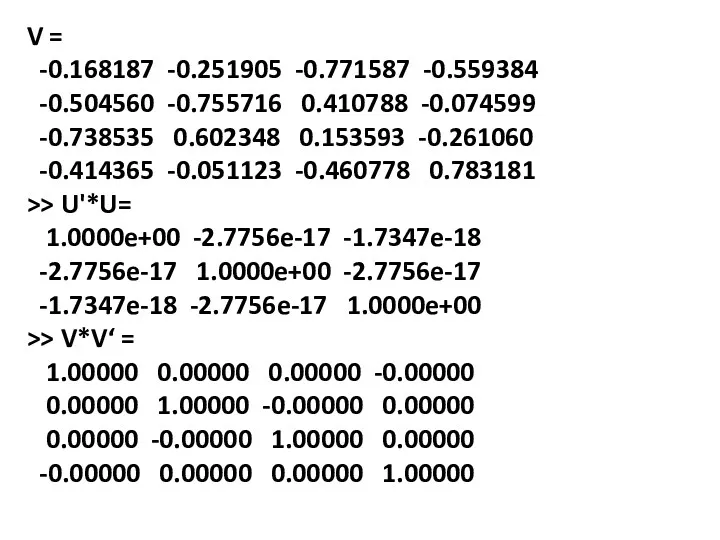
V =
-0.168187 -0.251905 -0.771587 -0.559384
-0.504560 -0.755716 0.410788 -0.074599
-0.738535
V =
-0.168187 -0.251905 -0.771587 -0.559384
-0.504560 -0.755716 0.410788 -0.074599
-0.738535
 Определение значений коэффициентов квадратичной функции по графику
Определение значений коэффициентов квадратичной функции по графику Умножение и деление чисел с разными знаками
Умножение и деление чисел с разными знаками Число 9. Цифра 9. Урок с использованием ИКТ
Число 9. Цифра 9. Урок с использованием ИКТ Площадь. Формула площади прямоугольника
Площадь. Формула площади прямоугольника Решение квадратных уравнений
Решение квадратных уравнений Умножение и деление десятичных дробей
Умножение и деление десятичных дробей Теория множеств. Основные понятия теории множеств
Теория множеств. Основные понятия теории множеств Теорема о сумме углов треугольника
Теорема о сумме углов треугольника Презентация СПОСОБ СЛОЖЕНИЯ СТОЛБИКОМ. СЛОЖЕНИЕ ДВУЗНАЧНЫХ И ТРЕХЗНАЧНЫХ ЧИСЕЛ С ПЕРЕХОДОМ ЧЕРЕЗ РАЗРЯД
Презентация СПОСОБ СЛОЖЕНИЯ СТОЛБИКОМ. СЛОЖЕНИЕ ДВУЗНАЧНЫХ И ТРЕХЗНАЧНЫХ ЧИСЕЛ С ПЕРЕХОДОМ ЧЕРЕЗ РАЗРЯД презентация устный счёт - внетабличное умножение и деление 4 класс
презентация устный счёт - внетабличное умножение и деление 4 класс Методика изучения задач на построение в школьном курсе планиметрии
Методика изучения задач на построение в школьном курсе планиметрии Функция. Свойства функции
Функция. Свойства функции Теорема Виета. Устная работа. Проверка выполнения домашней работы
Теорема Виета. Устная работа. Проверка выполнения домашней работы Неопределённый интеграл, его свойства . Непосредственное интегрирование. Метод замены переменной в неопределенном интеграле
Неопределённый интеграл, его свойства . Непосредственное интегрирование. Метод замены переменной в неопределенном интеграле Тождественные преобразования. 7 класс
Тождественные преобразования. 7 класс Решение показательных уравнений методом введения новой переменной
Решение показательных уравнений методом введения новой переменной Решение неравенств с одной переменной
Решение неравенств с одной переменной Сфера, шар основные характеристики
Сфера, шар основные характеристики Неделя математики
Неделя математики Вилкова М.В. Тренажер по математике. 3 - 4 классы.
Вилкова М.В. Тренажер по математике. 3 - 4 классы. Как и почему возникла теория вероятностей?
Как и почему возникла теория вероятностей? Измерительные инструменты: история и современность
Измерительные инструменты: история и современность Законы распределения случайных величин
Законы распределения случайных величин Размещения. Повторение и закрепление пройденного материала
Размещения. Повторение и закрепление пройденного материала Способы работы статистических данных
Способы работы статистических данных Линейная функция y = k∙x + b и её график
Линейная функция y = k∙x + b и её график Презентация урока математики во 2 классе
Презентация урока математики во 2 классе Движение по окружности. Задачи на ЕГЭ
Движение по окружности. Задачи на ЕГЭ