- Симплексный метод

Содержание
- 2. Среди универсальных методов решения задач линейного программирования наиболее распространен симплексный метод (или симплекс-метод), разработанный американским ученым
- 3. Нахождение начального опорного решения и переход к следующему опорному решению проводятся на основе применения метода Жордана-Гаусса
- 4. СИМПЛЕКС-МЕТОД ОСНОВАН НА СЛЕДУЮЩИХ СВОЙСТВАХ ЗЛП: Множество всех планов задачи линейного программирования выпукло. Не существует локального
- 5. СИМПЛЕКСНЫМ МЕТОДОМ называется метод последовательного улучшения плана. Название метода возникло от слова «симплекс», что значит «простейший»
- 6. (1) (2) КАНОНИЧЕСКАЯ ФОРМУЛА ЗЛП
- 7. ИДЕЯ МЕТОДА: найти вначале любую угловую точку многогранника решений, т.е. найти x0 опорное решение системы ограничений
- 8. СУЩНОСТЬ МЕТОДА: Пусть известно первое опорное решение системы ограничений, в ней выделены базисные неизвестные x1, x2,
- 9. - опорное решение. Чтобы перейти к новому опорному решению, надо сменить базис. Какой из векторов ввести
- 10. Умножим первое уравнение системы (1) на c1 , второе – на c2 т.д., m-тое уравнение -
- 11. Обозначим, ; ( j = m + 1, m + 2, …, n) тогда кратко или
- 12. КАК ЗАВИСИТ L ОТ ОЦЕНОЧНОГО КОЭФФИЦИЕНТА ∆J? Если все ∆j > 0, то L увеличить нельзя,
- 13. Пусть вводится в базис, тогда из (1) Получаем (5) и помним, что теперь xj ≠ 0,
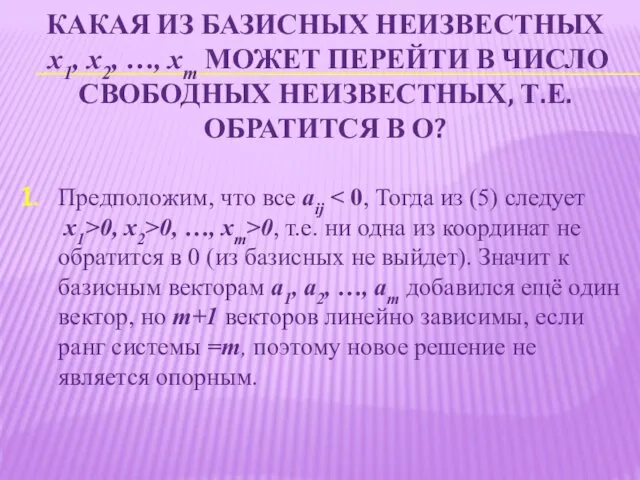
- 14. КАКАЯ ИЗ БАЗИСНЫХ НЕИЗВЕСТНЫХ x1, x2, …, xm МОЖЕТ ПЕРЕЙТИ В ЧИСЛО СВОБОДНЫХ НЕИЗВЕСТНЫХ, Т.Е. ОБРАТИТСЯ
- 15. 2. Предположим, что существует aij Но если в столбце несколько положительных элементов, то при таком выборе
- 16. КРИТЕРИЙ ОПТИМАЛЬНОСТИ Если для найденного опорного решения найдется хотя бы одна отрицательная оценка ∆j 0, то
- 17. ЭКОНОМИКО-МАТЕМАТИЧЕСКИЕ МЕТОДЫ И МОДЕЛИ МЕТОД СИМПЛЕКСНЫХ ТАБЛИЦ
- 18. Пусть дана ЗЛП с системой ограничений, состоящей из m линейных неравенств и n неизвестных: Целевая функция
- 19. ЗАДАЧА КАНОНИЧЕСКОЙ ФОРМЫ: (7)
- 20. Для решения задачи целесообразно использовать метод симплекс-таблиц. СОСТАВИМ ЕЁ ТРАФАРЕТ: Таблица 1.
- 21. В первом столбце таблицы (Cб) - коэффициенты целевой функции при базисных переменных. Во втором столбце (Хб)
- 22. В индексной строке записываем оценки: Наибольшая по модулю отрицательная оценка определяет разрешающий столбец. Разрешающую строку определяем
- 23. План не оптимален. Переходим к новой симплекс-таблице, используя метод Жордана-Гаусса: Элементы разрешающей строки в новой таблице
- 24. Приведём к каноническому виду: В качестве примера решим симплекс-таблицей ВЛП
- 25. Составим симплекс таблицу Таблица 2. Разрешающему столбцу соответствует наименьшая оценка = -4. Разрешающую строку найдем по
- 26. Переходим к новой симплекс-таблице по формуле Жордана-Гаусса. Разрешающему столбцу соответствует наименьшая оценка = -1/3. Разрешающую строку
- 28. Скачать презентацию
Среди универсальных методов решения задач линейного программирования наиболее распространен симплексный метод
Среди универсальных методов решения задач линейного программирования наиболее распространен симплексный метод
Нахождение начального опорного решения и переход к следующему опорному решению проводятся
Нахождение начального опорного решения и переход к следующему опорному решению проводятся
СИМПЛЕКС-МЕТОД ОСНОВАН НА СЛЕДУЮЩИХ СВОЙСТВАХ ЗЛП:
Множество всех планов задачи линейного программирования
СИМПЛЕКС-МЕТОД ОСНОВАН НА СЛЕДУЮЩИХ СВОЙСТВАХ ЗЛП:
Множество всех планов задачи линейного программирования
СИМПЛЕКСНЫМ МЕТОДОМ
называется метод последовательного улучшения плана.
Название метода возникло от слова
СИМПЛЕКСНЫМ МЕТОДОМ
называется метод последовательного улучшения плана.
Название метода возникло от слова
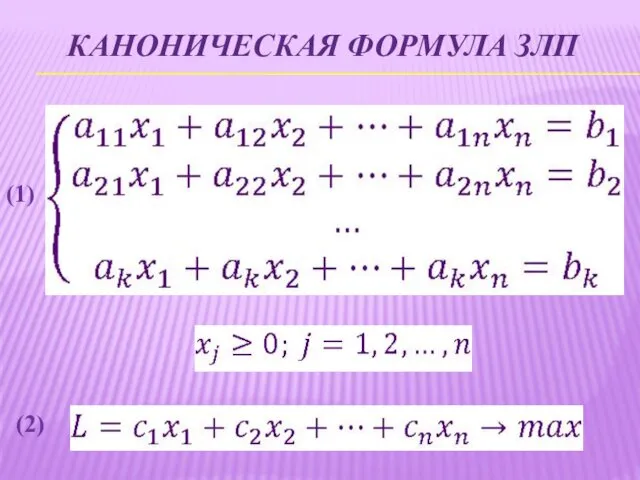
(1)
(2)
КАНОНИЧЕСКАЯ ФОРМУЛА ЗЛП
(1)
(2)
КАНОНИЧЕСКАЯ ФОРМУЛА ЗЛП
ИДЕЯ МЕТОДА:
найти вначале любую угловую точку многогранника решений, т.е. найти x0
ИДЕЯ МЕТОДА:
найти вначале любую угловую точку многогранника решений, т.е. найти x0
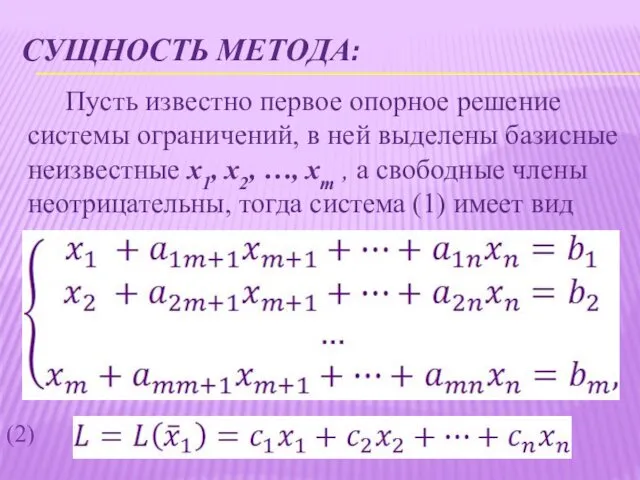
СУЩНОСТЬ МЕТОДА:
Пусть известно первое опорное решение системы ограничений, в ней выделены
СУЩНОСТЬ МЕТОДА:
Пусть известно первое опорное решение системы ограничений, в ней выделены
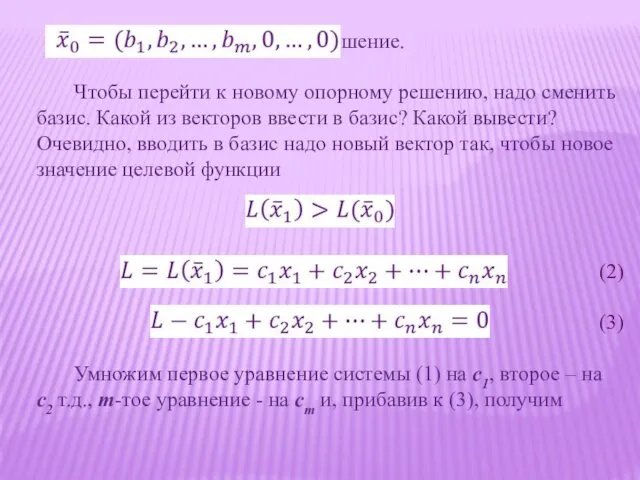
- опорное решение.
Чтобы перейти к новому опорному решению, надо сменить
- опорное решение.
Чтобы перейти к новому опорному решению, надо сменить
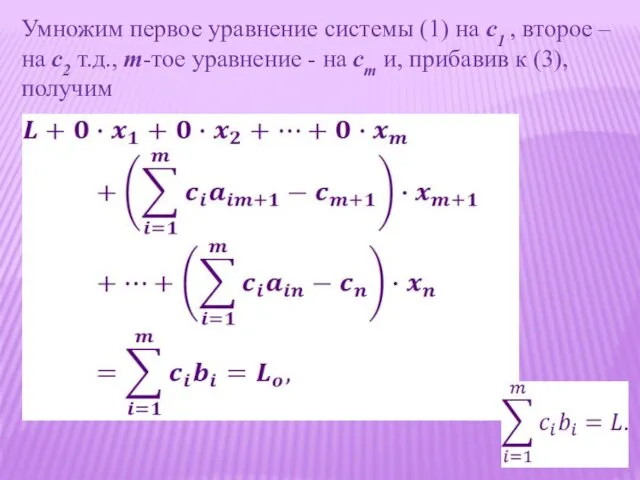
Умножим первое уравнение системы (1) на c1 , второе – на
Умножим первое уравнение системы (1) на c1 , второе – на
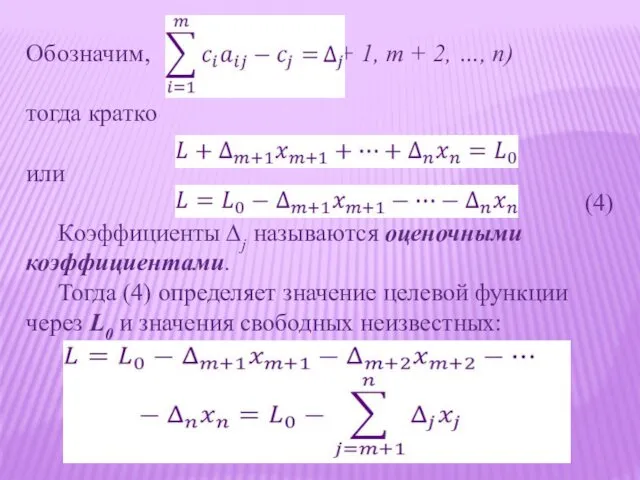
Обозначим, ; ( j = m + 1, m + 2, …,
Обозначим, ; ( j = m + 1, m + 2, …,
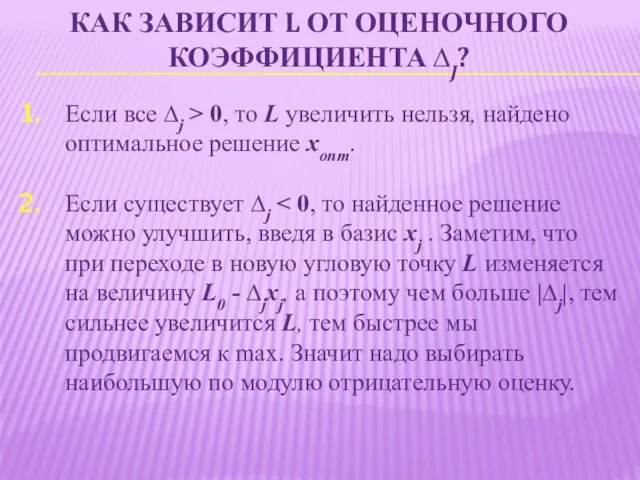
КАК ЗАВИСИТ L ОТ ОЦЕНОЧНОГО КОЭФФИЦИЕНТА ∆J?
Если все ∆j > 0,
КАК ЗАВИСИТ L ОТ ОЦЕНОЧНОГО КОЭФФИЦИЕНТА ∆J?
Если все ∆j > 0,
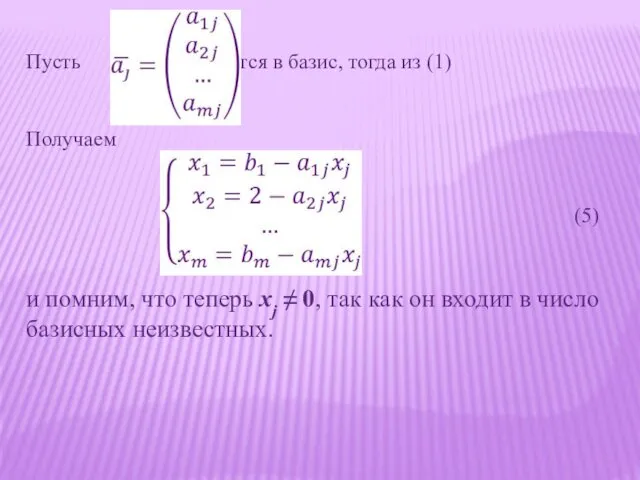
Пусть вводится в базис, тогда из (1)
Получаем
(5)
и помним, что теперь xj
Получаем
(5)
и помним, что теперь xj
КАКАЯ ИЗ БАЗИСНЫХ НЕИЗВЕСТНЫХ
x1, x2, …, xm МОЖЕТ ПЕРЕЙТИ В
КАКАЯ ИЗ БАЗИСНЫХ НЕИЗВЕСТНЫХ x1, x2, …, xm МОЖЕТ ПЕРЕЙТИ В
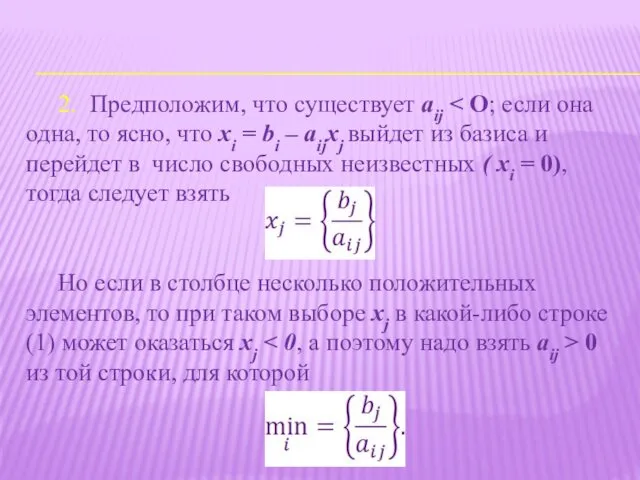
2. Предположим, что существует aij < О; если она одна, то
2. Предположим, что существует aij < О; если она одна, то

КРИТЕРИЙ ОПТИМАЛЬНОСТИ
Если для найденного опорного решения найдется хотя бы одна отрицательная
КРИТЕРИЙ ОПТИМАЛЬНОСТИ
Если для найденного опорного решения найдется хотя бы одна отрицательная
ЭКОНОМИКО-МАТЕМАТИЧЕСКИЕ МЕТОДЫ И МОДЕЛИ
МЕТОД СИМПЛЕКСНЫХ ТАБЛИЦ
ЭКОНОМИКО-МАТЕМАТИЧЕСКИЕ МЕТОДЫ И МОДЕЛИ
МЕТОД СИМПЛЕКСНЫХ ТАБЛИЦ
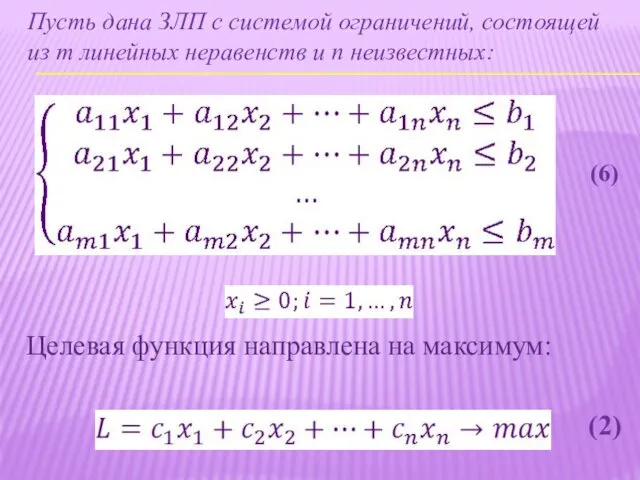
Пусть дана ЗЛП с системой ограничений, состоящей из m линейных неравенств
Пусть дана ЗЛП с системой ограничений, состоящей из m линейных неравенств
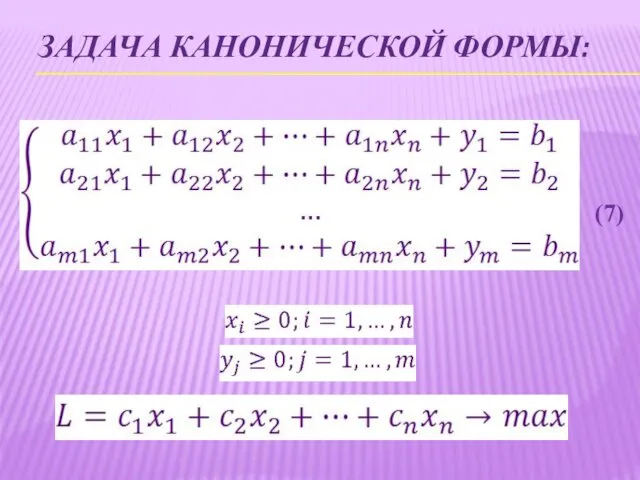
ЗАДАЧА КАНОНИЧЕСКОЙ ФОРМЫ:
(7)
ЗАДАЧА КАНОНИЧЕСКОЙ ФОРМЫ:
(7)
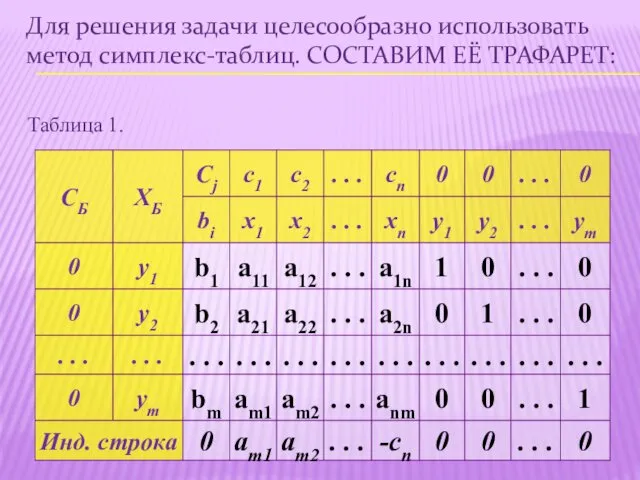
Для решения задачи целесообразно использовать метод симплекс-таблиц. СОСТАВИМ ЕЁ ТРАФАРЕТ:
Таблица 1.
Для решения задачи целесообразно использовать метод симплекс-таблиц. СОСТАВИМ ЕЁ ТРАФАРЕТ:
Таблица 1.
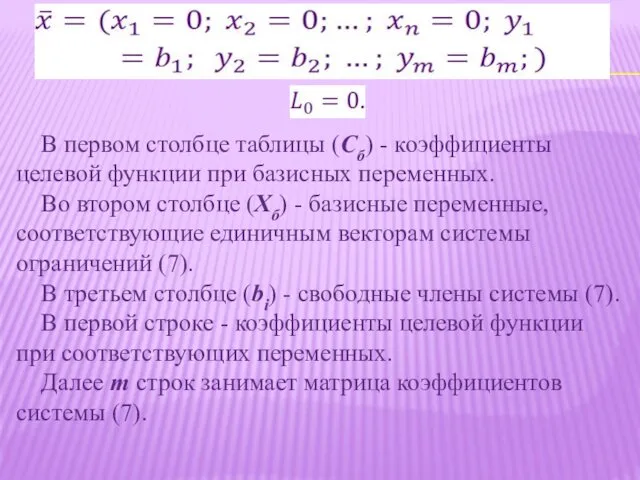
В первом столбце таблицы (Cб) - коэффициенты целевой функции при базисных
В первом столбце таблицы (Cб) - коэффициенты целевой функции при базисных
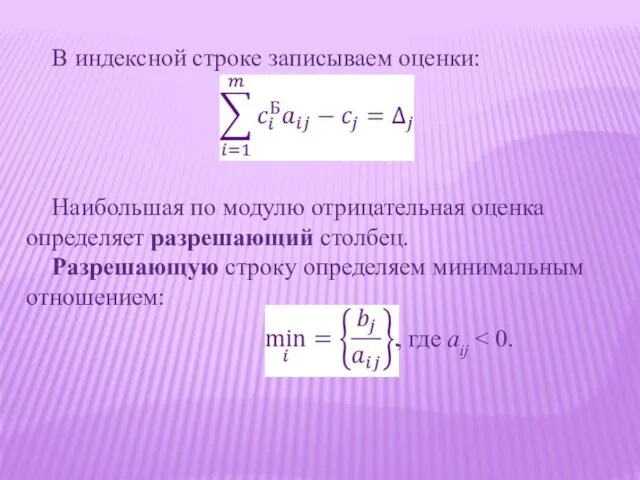
В индексной строке записываем оценки:
Наибольшая по модулю отрицательная оценка определяет разрешающий
В индексной строке записываем оценки:
Наибольшая по модулю отрицательная оценка определяет разрешающий
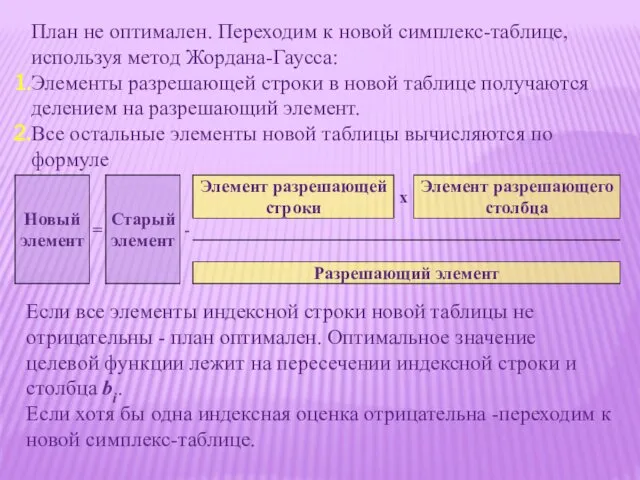
План не оптимален. Переходим к новой симплекс-таблице, используя метод Жордана-Гаусса:
Элементы разрешающей
План не оптимален. Переходим к новой симплекс-таблице, используя метод Жордана-Гаусса:
Элементы разрешающей
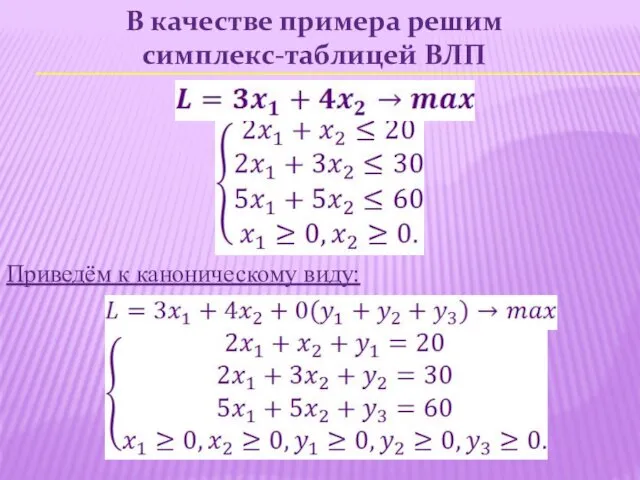
Приведём к каноническому виду:
В качестве примера решим
симплекс-таблицей ВЛП
Приведём к каноническому виду:
В качестве примера решим
симплекс-таблицей ВЛП

Составим симплекс таблицу
Таблица 2.
Разрешающему столбцу соответствует наименьшая оценка = -4.
Разрешающую строку
Составим симплекс таблицу
Таблица 2.
Разрешающему столбцу соответствует наименьшая оценка = -4.
Разрешающую строку
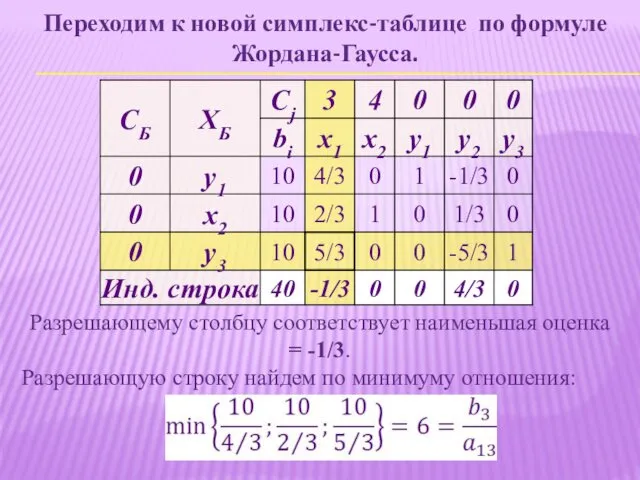
Переходим к новой симплекс-таблице по формуле Жордана-Гаусса.
Разрешающему столбцу соответствует наименьшая оценка
Переходим к новой симплекс-таблице по формуле Жордана-Гаусса.
Разрешающему столбцу соответствует наименьшая оценка
 Урок математики в 1 классе по теме Числа от 0 до 20
Урок математики в 1 классе по теме Числа от 0 до 20 Решение задач на готовых чертежах. Подобные треугольники
Решение задач на готовых чертежах. Подобные треугольники Точечные и интервальные оценки неизвестных параметров распределения
Точечные и интервальные оценки неизвестных параметров распределения Алгебра логики. Основные понятия
Алгебра логики. Основные понятия Использование ИКТ на уроках математики
Использование ИКТ на уроках математики Соотношения между сторонами и углами прямоугольного треугольника
Соотношения между сторонами и углами прямоугольного треугольника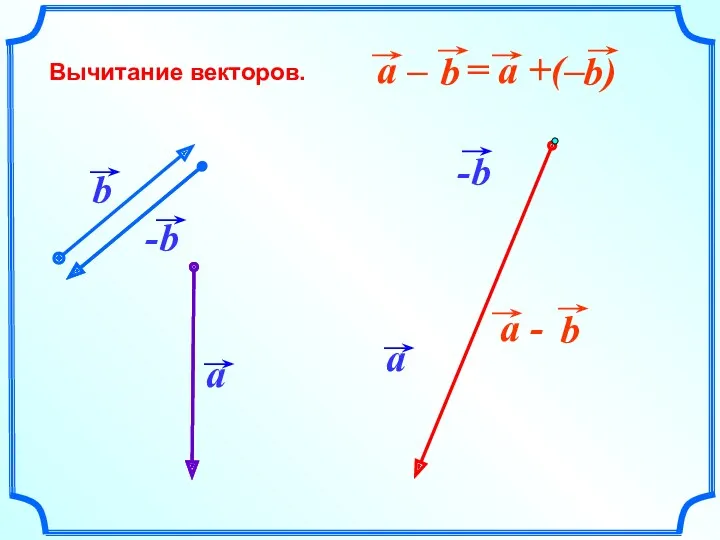 Вычитание и сложение векторов. Правило параллелограмма
Вычитание и сложение векторов. Правило параллелограмма Формулы сокращённого умножения
Формулы сокращённого умножения Что есть Время? Иудейский календарь Исламский календарь
Что есть Время? Иудейский календарь Исламский календарь Параллельный перенос
Параллельный перенос Решение задач с параметром, графическим способом
Решение задач с параметром, графическим способом Задачи повышенной сложности.
Задачи повышенной сложности. Приёмы табличного вычитания однозначных чисел с переходом через десяток
Приёмы табличного вычитания однозначных чисел с переходом через десяток Примеры на вычитание с переходом через десяток в пределах 20. 1 класс
Примеры на вычитание с переходом через десяток в пределах 20. 1 класс Каталог авторских дидактических материалов по интерактивному оборудованию
Каталог авторских дидактических материалов по интерактивному оборудованию презентация по математике
презентация по математике Использование современных технологий на уроках математики
Использование современных технологий на уроках математики Умножение и деление на 10, 100
Умножение и деление на 10, 100 Тетраэдр и параллелепипед
Тетраэдр и параллелепипед Презентация к уроку математики по теме Сложение 1 класс
Презентация к уроку математики по теме Сложение 1 класс Квадратные уравнения
Квадратные уравнения Лекция 10. Математическое описание ЛС. Линейная непрерывная система и ее представления
Лекция 10. Математическое описание ЛС. Линейная непрерывная система и ее представления Состав числа 5 из двух слагаемых
Состав числа 5 из двух слагаемых Пословицы в диаграммах: занимательно о русском языке
Пословицы в диаграммах: занимательно о русском языке Мера центральной тенденции. Средние величины и изучение вариации
Мера центральной тенденции. Средние величины и изучение вариации Устный счёт. Думай, считай, отвечай
Устный счёт. Думай, считай, отвечай Что наша жизнь? – игра… Проект-исследование
Что наша жизнь? – игра… Проект-исследование Тригонометрические уравнения
Тригонометрические уравнения