- Устойчивость решений дискретных систем

Содержание
- 2. Неподвижная точка x* отображения F называется притягивающей, если все точки из некоторой ее малой окрестности стремятся
- 3. Помимо самого факта существования в дискретных системах решений в виде неподвижных точек (состояний покоя или равновесия
- 4. Найдем условия устойчивости неподвижной точки x*. В связи с тем, что проблема устойчивости связана с анализом
- 5. Введем обозначение Здесь индексы i,k = 1,…, N – размерность отображения (2). Тогда выражение (8) можно
- 6. Неподвижная точка x* исходного отображения (2) является устойчивой, если все мультипликаторы ρk удовлетворяют условию |ρk| Если
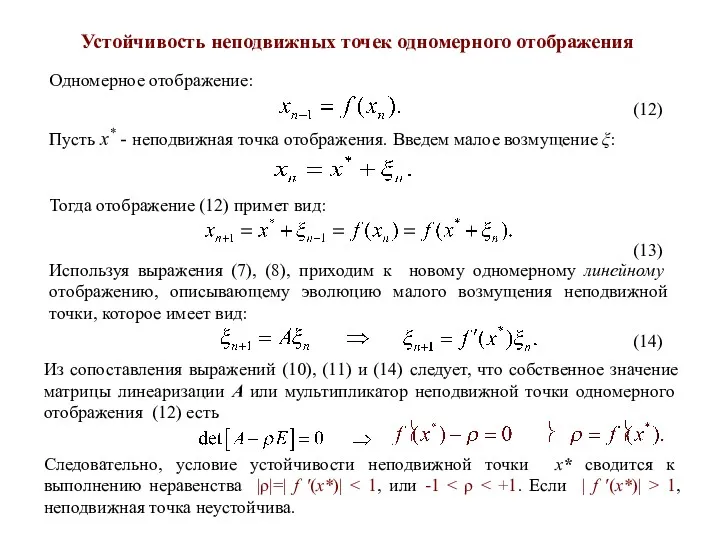
- 7. Устойчивость неподвижных точек одномерного отображения Одномерное отображение: (12) Пусть x* - неподвижная точка отображения. Введем малое
- 8. Геометрически неподвижная точка x* одномерного отображения (12) есть точка пересечения графика функции xn+1 = f(xn) с
- 9. По характеру приближения траектории к неподвижной точке на итерационной диаграмме можно дополнительно выделить два типа неподвижных
- 11. Устойчивый узел (фокус) Типы неподвижных точек в одномерном отображении Состояние нейтрально. Переходные значения параметра называются критическими.
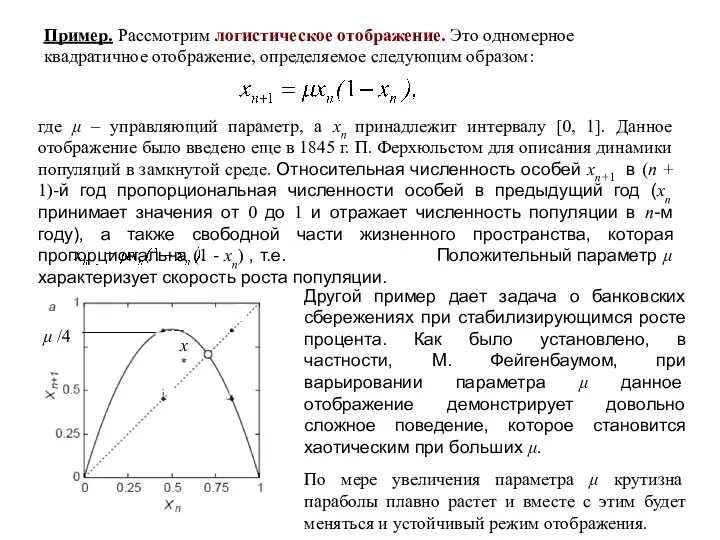
- 12. Пример. Рассмотрим логистическое отображение. Это одномерное квадратичное отображение, определяемое следующим образом: где μ – управляющий параметр,
- 13. Найдем неподвижные точки логистического отображения и исследуем их устойчивость. Согласно определению (5) неподвижная точка отображения определяется
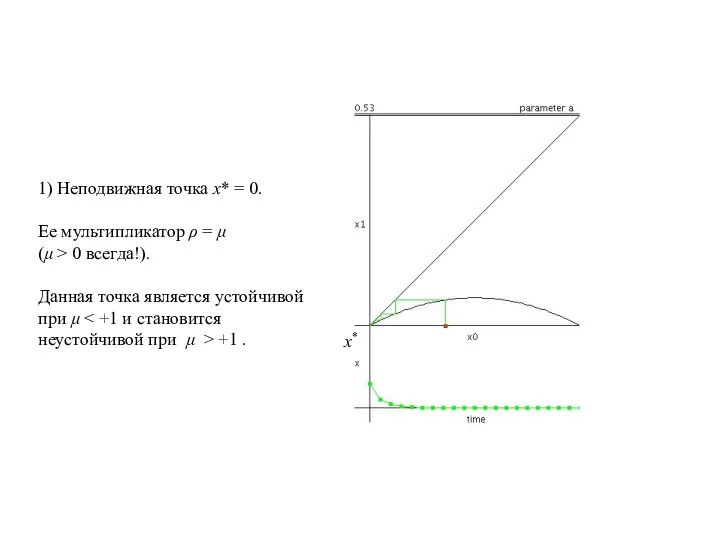
- 14. x* 1) Неподвижная точка x* = 0. Ее мультипликатор ρ = μ (μ > 0 всегда!).
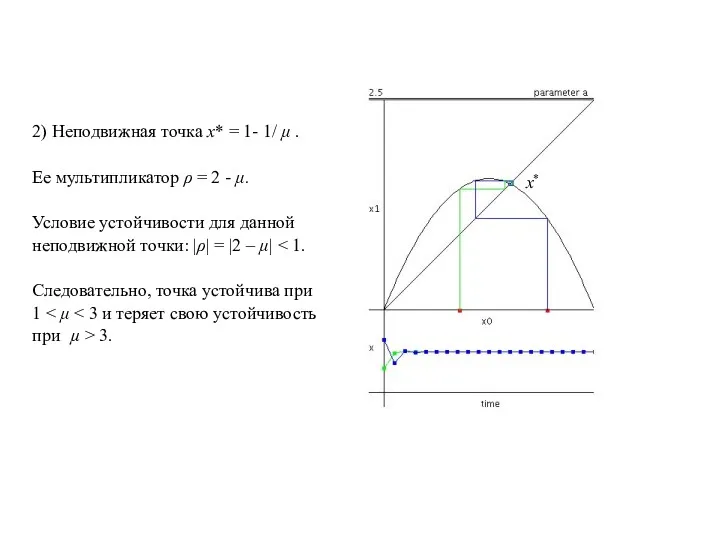
- 15. x* 2) Неподвижная точка x* = 1- 1/ μ . Ее мультипликатор ρ = 2 -
- 16. Рассмотрим 2-й тип частного решения дискретной системы – периодическое решение. Определение. Последовательность точек x*1, x*2, …,
- 17. Устойчивость m-цикла дискретного отображения можно определить, применив рассмотренный выше способ анализа устойчивости неподвижной точки. Матрица линеаризации
- 18. В качестве примера рассмотрим цикл периода 2 (2-цикла) одномерного отображения, для которого выполняется следующее условие: (19)
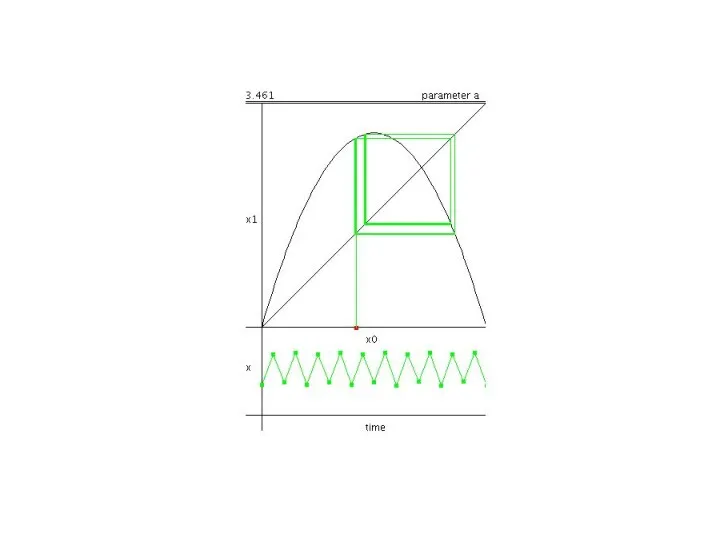
- 19. x1* x2* Цикл периода 2 или 2-цикл логистического отображения
- 20. Сверхустойчивый цикл Из соотношения (22) видно, что устойчивость цикла в целом определяется совокупными свойствами всех его
- 21. Пример. Рассмотрим логистическое отображение. Это одномерное квадратичное отображение, определяемое следующим образом: где μ – управляющий параметр,
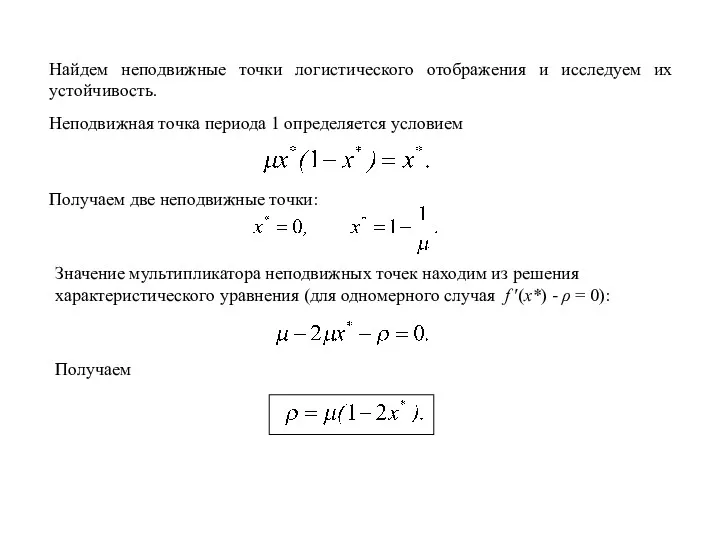
- 22. Найдем неподвижные точки логистического отображения и исследуем их устойчивость. Неподвижная точка периода 1 определяется условием Получаем
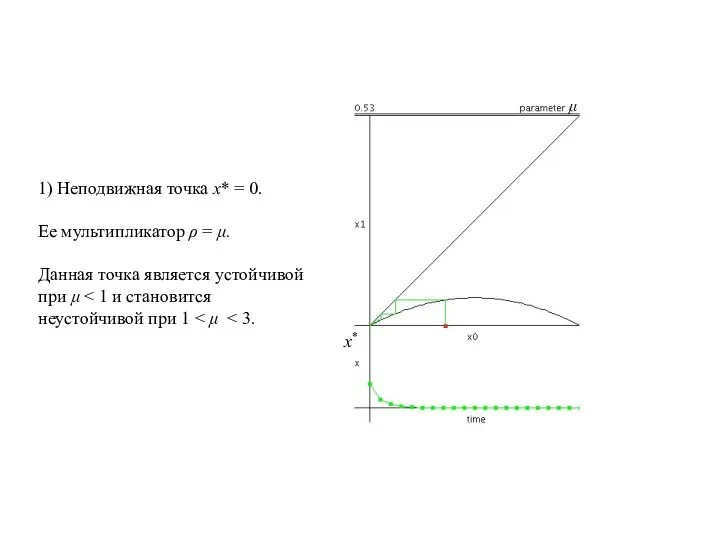
- 23. x* 1) Неподвижная точка x* = 0. Ее мультипликатор ρ = μ. Данная точка является устойчивой
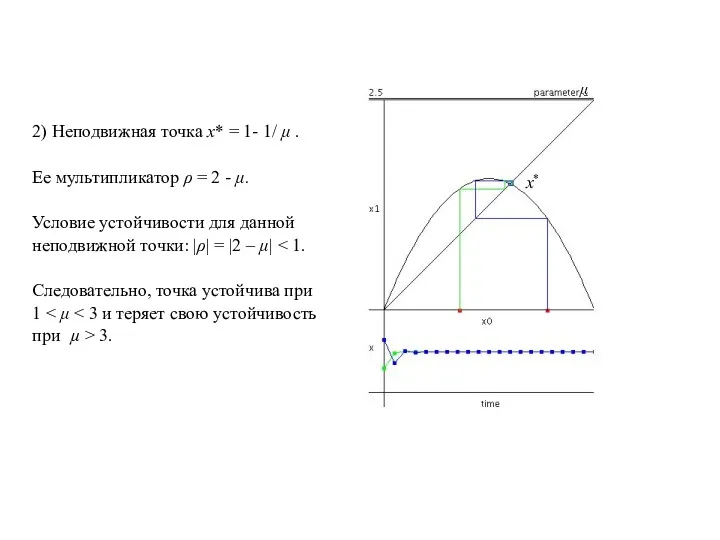
- 24. x* 2) Неподвижная точка x* = 1- 1/ μ . Ее мультипликатор ρ = 2 -
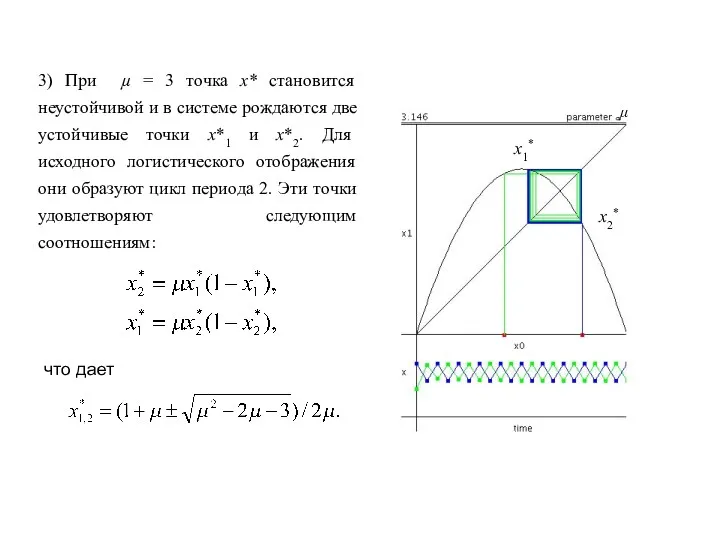
- 25. x1* x2* 3) При µ = 3 точка x* становится неустойчивой и в системе рождаются две
- 26. Условие устойчивости цикла периода 2 определяется с помощью неравенства (22): Вычислим сначала производные функции последования в
- 28. Устойчивость неподвижных точек двумерного отображения (16) (23) (24) (25) (26)
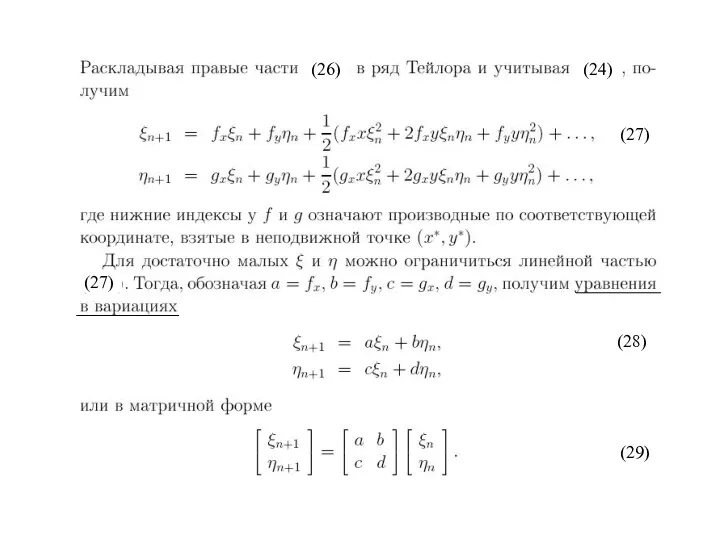
- 29. (19) (17) (20) (21) (22) (20) (26) (24) (27) (27) (28) (29)
- 30. Чтобы найти мультипликаторы неподвижных точек отображения или собственные значения матрицы линеаризации, необходимо найти корни характеристического уравнения
- 31. Типы неподвижных точек в двумерном отображении Как видно из выражения (32), собственные значения ρ1,2 могут быть
- 32. Случай действительных ρ1 и ρ2. 1. ρ1 2. -1 3. 0 4. ρ1 > +1 и
- 33. 6. 0 7. ρ1 > +1 и -1 8. 0 9. ρ1 > +1 и 0
- 34. Таким образом, при действительных ρ1 и ρ2 мы имеем 2 типа неподвижных точек: 1) узел, когда
- 35. Почему неподвижная точка называется седлом или седловой? Седло или седловая неподвижная точка всегда неустойчива. Но в
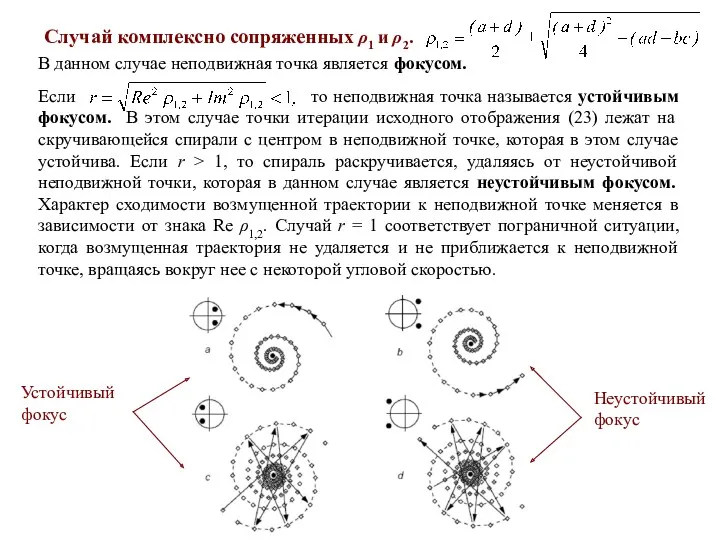
- 36. Случай комплексно сопряженных ρ1 и ρ2. В данном случае неподвижная точка является фокусом. Если то неподвижная
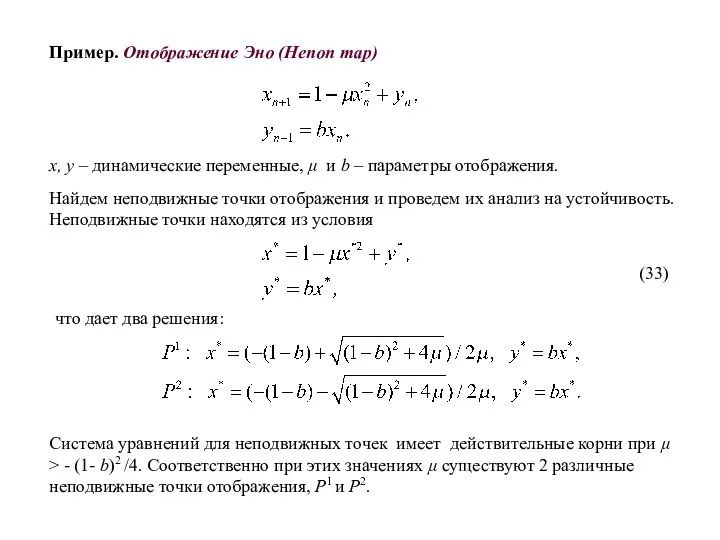
- 37. Пример. Отображение Эно (Henon map) x, y – динамические переменные, μ и b – параметры отображения.
- 38. Уравнение в вариациях для малых отклонений ξ и η от состояния равновесия в матричной форме имеет
- 40. Скачать презентацию
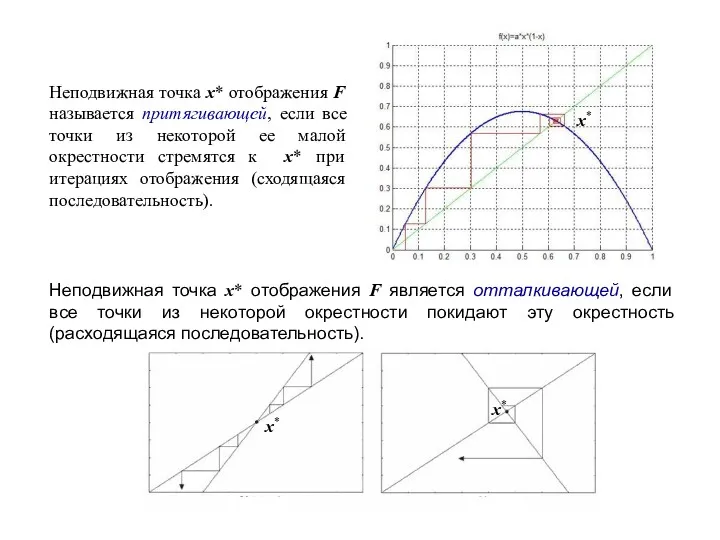
Неподвижная точка x* отображения F называется притягивающей, если все точки из
Неподвижная точка x* отображения F называется притягивающей, если все точки из
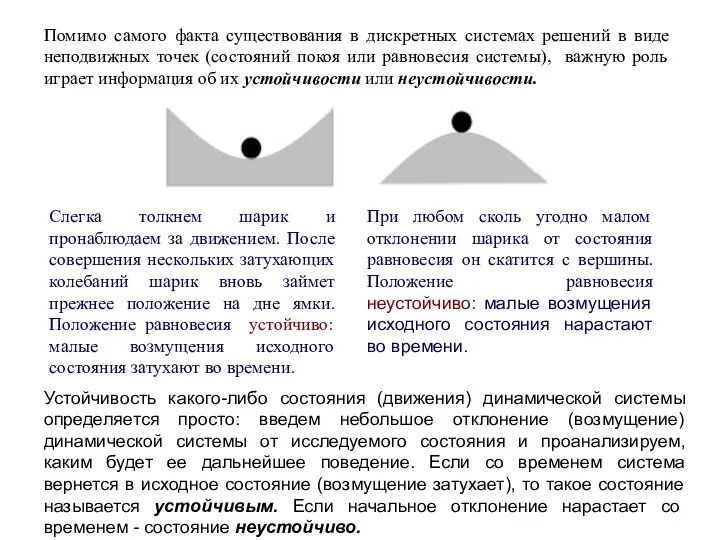
Помимо самого факта существования в дискретных системах решений в виде неподвижных
Помимо самого факта существования в дискретных системах решений в виде неподвижных
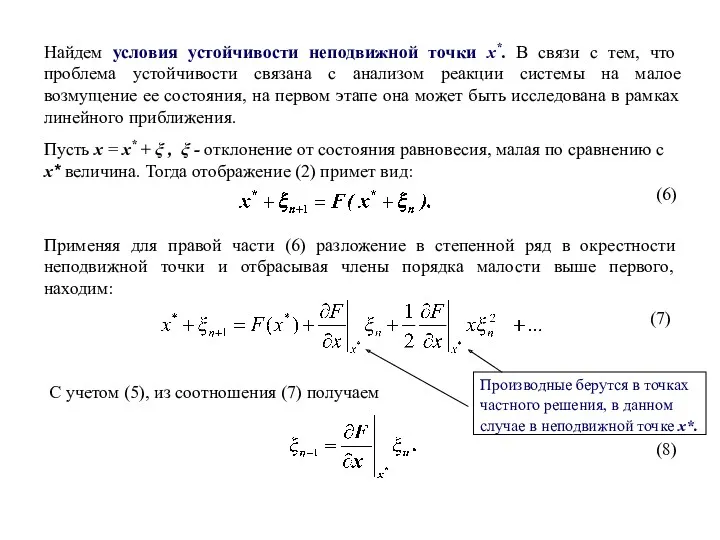
Найдем условия устойчивости неподвижной точки x*. В связи с тем, что
Найдем условия устойчивости неподвижной точки x*. В связи с тем, что
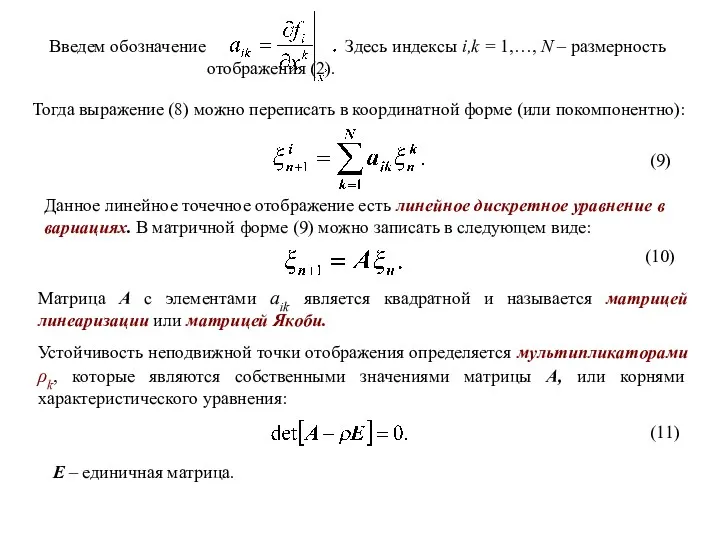
Введем обозначение Здесь индексы i,k = 1,…, N – размерность отображения
Введем обозначение Здесь индексы i,k = 1,…, N – размерность отображения
Неподвижная точка x* исходного отображения (2) является устойчивой, если все мультипликаторы
Неподвижная точка x* исходного отображения (2) является устойчивой, если все мультипликаторы
Устойчивость неподвижных точек одномерного отображения
Одномерное отображение:
(12)
Пусть x* - неподвижная точка отображения.
Устойчивость неподвижных точек одномерного отображения
Одномерное отображение:
(12)
Пусть x* - неподвижная точка отображения.
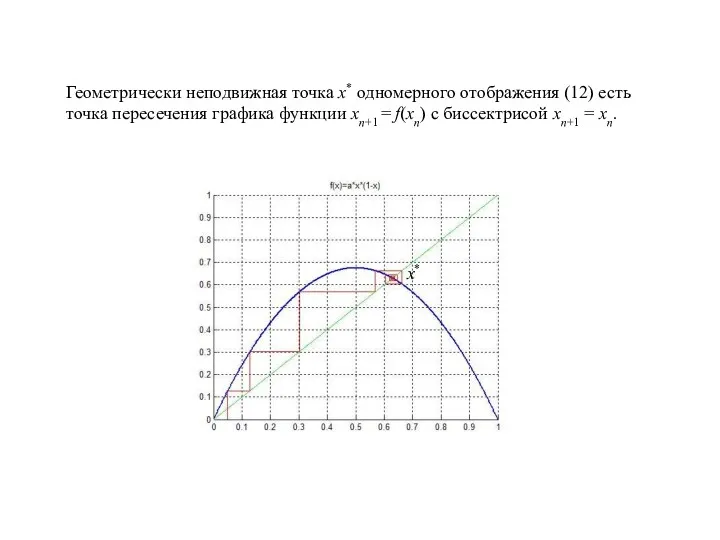
Геометрически неподвижная точка x* одномерного отображения (12) есть точка пересечения графика
Геометрически неподвижная точка x* одномерного отображения (12) есть точка пересечения графика
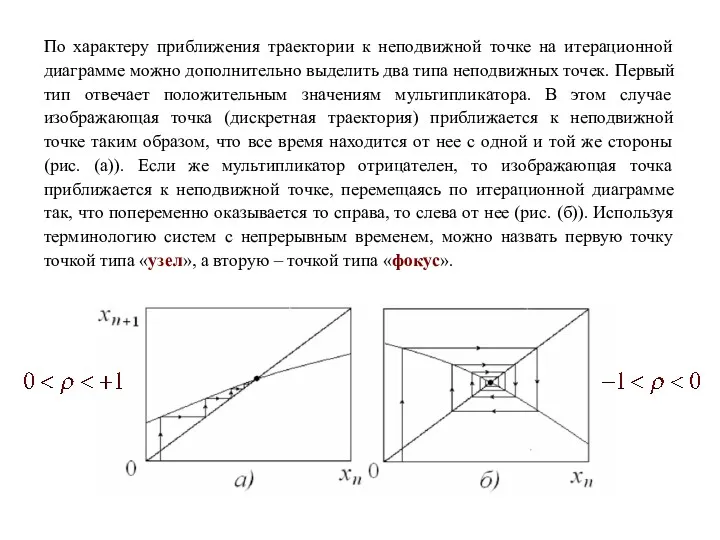
По характеру приближения траектории к неподвижной точке на итерационной диаграмме можно
По характеру приближения траектории к неподвижной точке на итерационной диаграмме можно
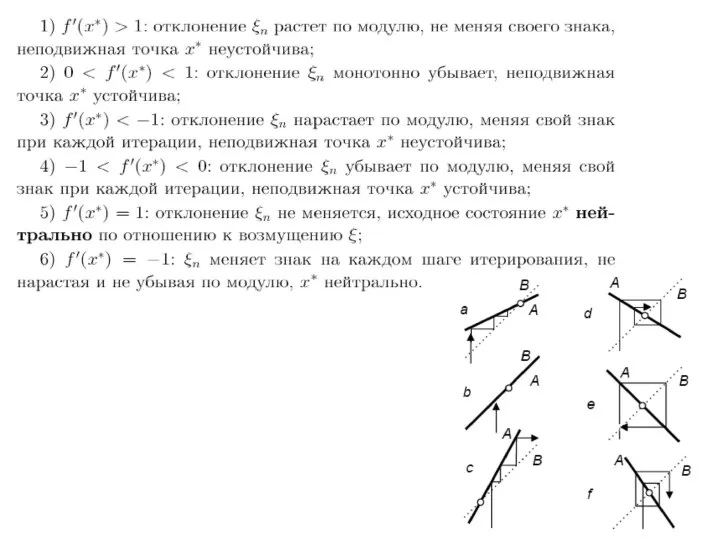
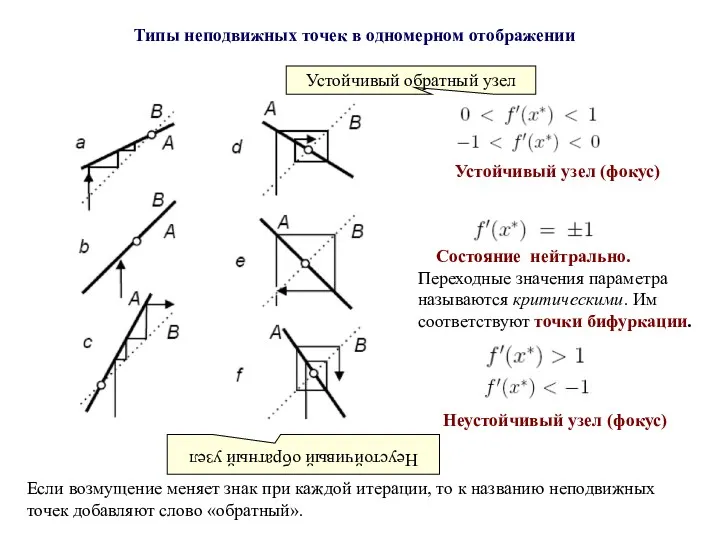
Устойчивый узел (фокус)
Типы неподвижных точек в одномерном отображении
Состояние нейтрально.
Устойчивый узел (фокус)
Типы неподвижных точек в одномерном отображении
Состояние нейтрально.
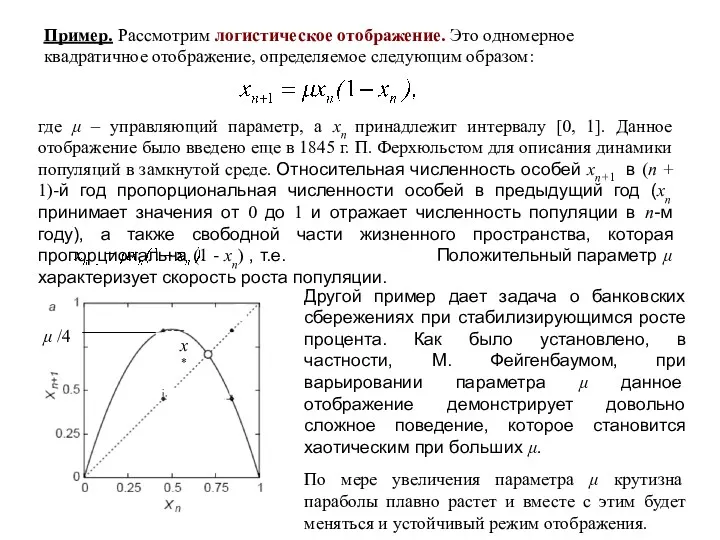
Пример. Рассмотрим логистическое отображение. Это одномерное квадратичное отображение, определяемое следующим образом:
Пример. Рассмотрим логистическое отображение. Это одномерное квадратичное отображение, определяемое следующим образом:
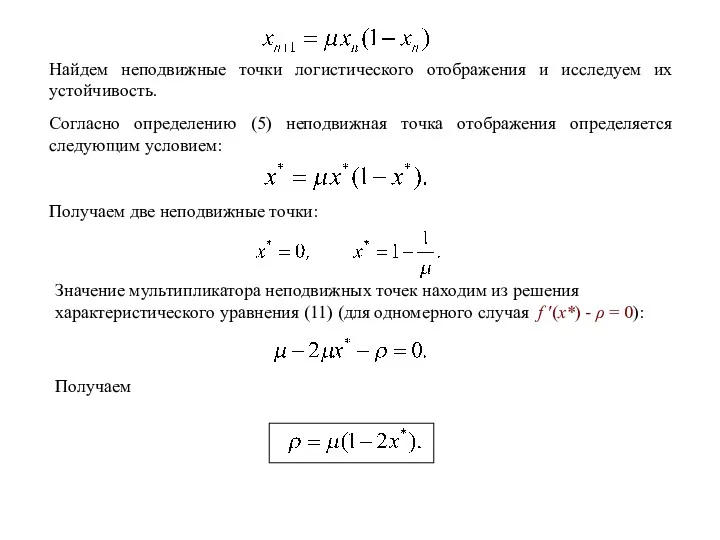
Найдем неподвижные точки логистического отображения и исследуем их устойчивость.
Согласно определению (5)
Найдем неподвижные точки логистического отображения и исследуем их устойчивость.
Согласно определению (5)
x*
1) Неподвижная точка x* = 0.
Ее мультипликатор ρ = μ
x*
1) Неподвижная точка x* = 0.
Ее мультипликатор ρ = μ
x*
2) Неподвижная точка x* = 1- 1/ μ .
Ее мультипликатор
x*
2) Неподвижная точка x* = 1- 1/ μ .
Ее мультипликатор
Рассмотрим 2-й тип частного решения дискретной системы – периодическое решение.
Определение.
Рассмотрим 2-й тип частного решения дискретной системы – периодическое решение.
Определение.
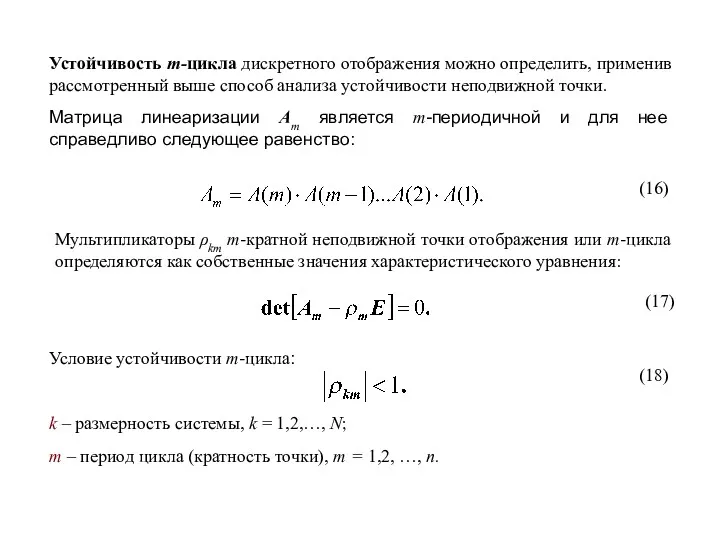
Устойчивость m-цикла дискретного отображения можно определить, применив рассмотренный выше способ анализа
Устойчивость m-цикла дискретного отображения можно определить, применив рассмотренный выше способ анализа
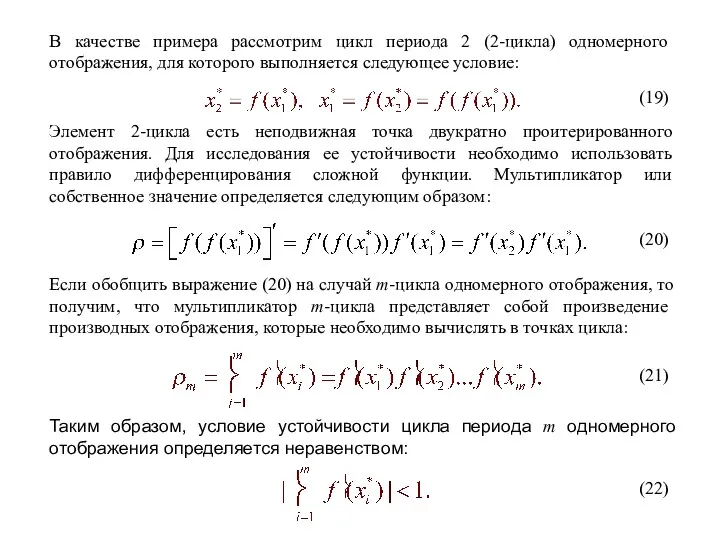
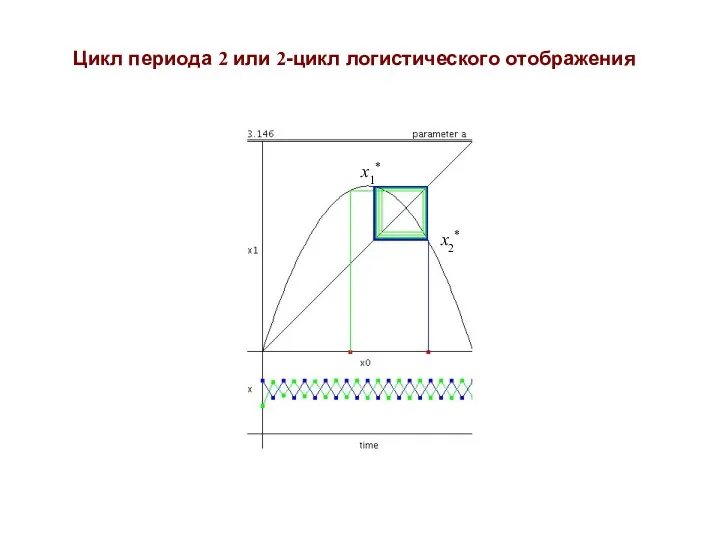
В качестве примера рассмотрим цикл периода 2 (2-цикла) одномерного отображения, для
В качестве примера рассмотрим цикл периода 2 (2-цикла) одномерного отображения, для
x1*
x2*
Цикл периода 2 или 2-цикл логистического отображения
x1*
x2*
Цикл периода 2 или 2-цикл логистического отображения
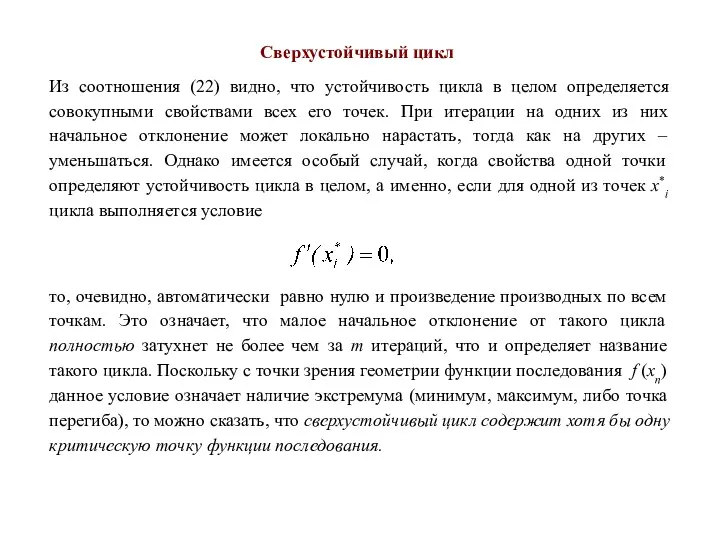
Сверхустойчивый цикл
Из соотношения (22) видно, что устойчивость цикла в целом определяется
Сверхустойчивый цикл
Из соотношения (22) видно, что устойчивость цикла в целом определяется
Пример. Рассмотрим логистическое отображение. Это одномерное квадратичное отображение, определяемое следующим образом:
Пример. Рассмотрим логистическое отображение. Это одномерное квадратичное отображение, определяемое следующим образом:
Найдем неподвижные точки логистического отображения и исследуем их устойчивость.
Неподвижная точка периода
Найдем неподвижные точки логистического отображения и исследуем их устойчивость.
Неподвижная точка периода
x*
1) Неподвижная точка x* = 0.
Ее мультипликатор ρ = μ.
x*
1) Неподвижная точка x* = 0.
Ее мультипликатор ρ = μ.
x*
2) Неподвижная точка x* = 1- 1/ μ .
Ее мультипликатор
x*
2) Неподвижная точка x* = 1- 1/ μ .
Ее мультипликатор
x1*
x2*
3) При µ = 3 точка x* становится неустойчивой и в
x1*
x2*
3) При µ = 3 точка x* становится неустойчивой и в
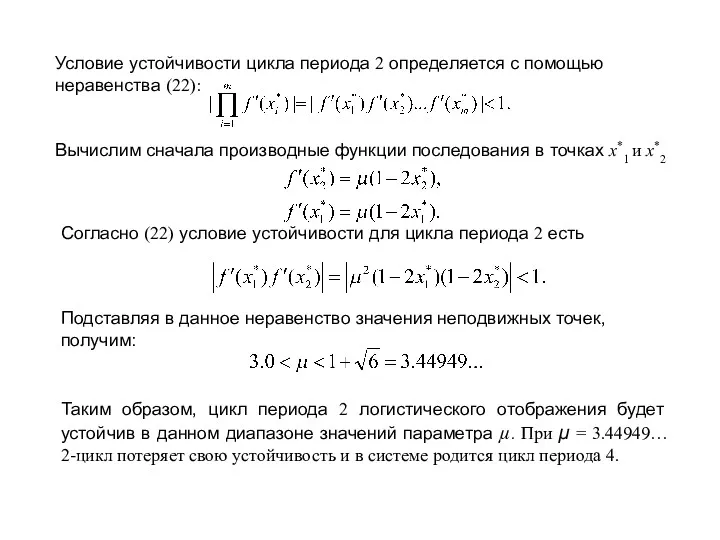
Условие устойчивости цикла периода 2 определяется с помощью неравенства (22):
Вычислим
Условие устойчивости цикла периода 2 определяется с помощью неравенства (22):
Вычислим
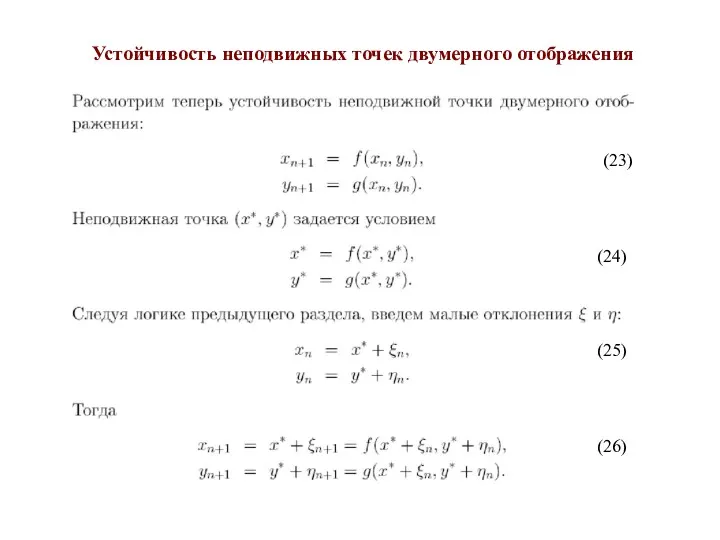
Устойчивость неподвижных точек двумерного отображения
(16)
(23)
(24)
(25)
(26)
Устойчивость неподвижных точек двумерного отображения
(16)
(23)
(24)
(25)
(26)
(19)
(17)
(20)
(21)
(22)
(20)
(26)
(24)
(27)
(27)
(28)
(29)
(19)
(17)
(20)
(21)
(22)
(20)
(26)
(24)
(27)
(27)
(28)
(29)
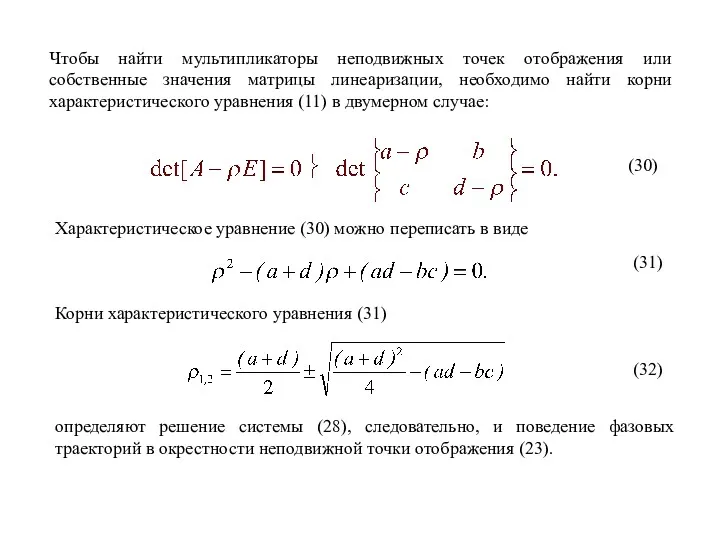
Чтобы найти мультипликаторы неподвижных точек отображения или собственные значения матрицы линеаризации,
Чтобы найти мультипликаторы неподвижных точек отображения или собственные значения матрицы линеаризации,
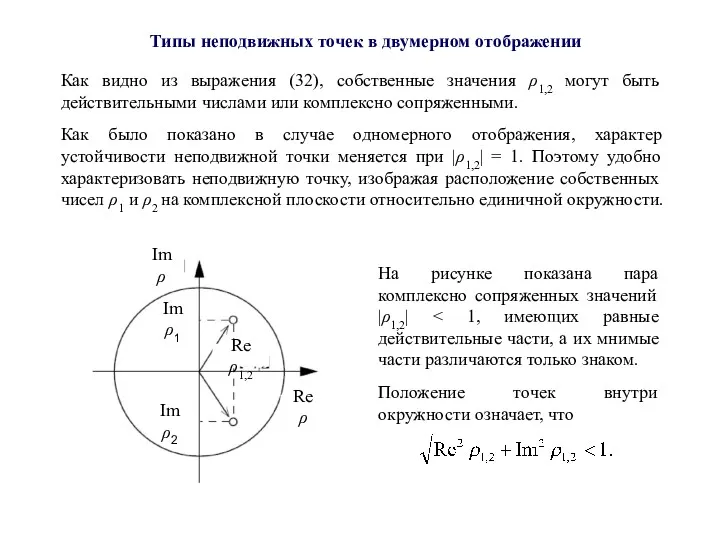
Типы неподвижных точек в двумерном отображении
Как видно из выражения (32), собственные
Типы неподвижных точек в двумерном отображении
Как видно из выражения (32), собственные
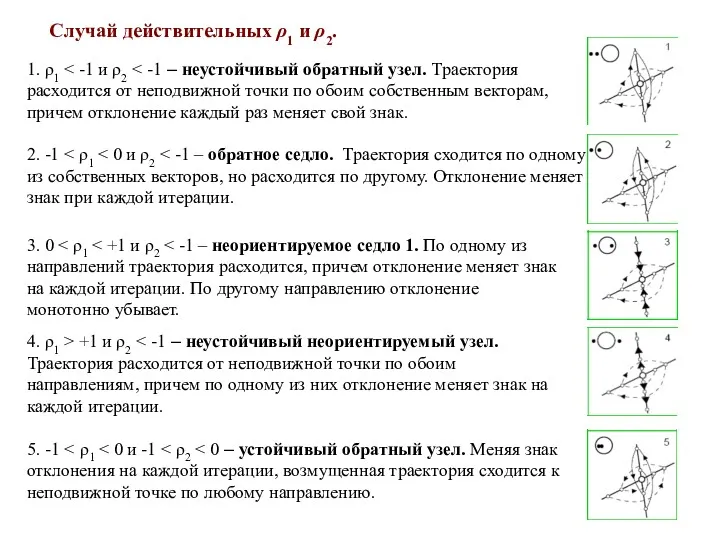
Случай действительных ρ1 и ρ2.
1. ρ1 < -1 и ρ2
Случай действительных ρ1 и ρ2.
1. ρ1 < -1 и ρ2
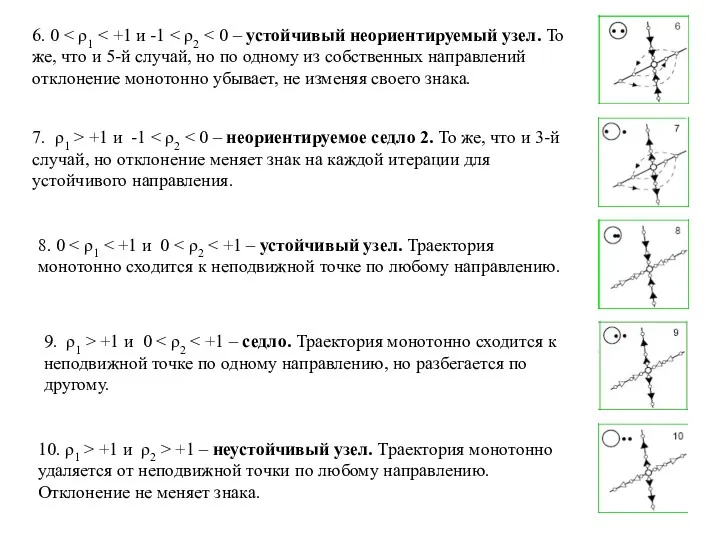
6. 0 < ρ1 < +1 и -1 < ρ2 <
6. 0 < ρ1 < +1 и -1 < ρ2 <
Таким образом, при действительных ρ1 и ρ2 мы имеем 2 типа
Таким образом, при действительных ρ1 и ρ2 мы имеем 2 типа
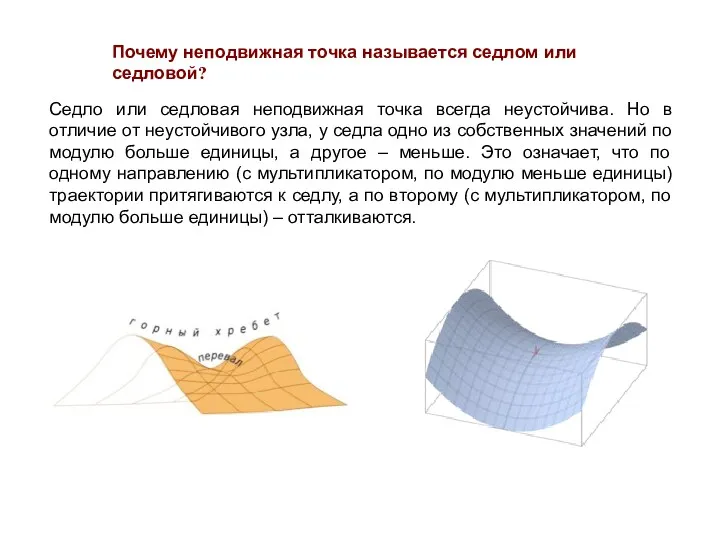
Почему неподвижная точка называется седлом или седловой?
Седло или седловая неподвижная точка
Почему неподвижная точка называется седлом или седловой?
Седло или седловая неподвижная точка
Случай комплексно сопряженных ρ1 и ρ2.
В данном случае неподвижная точка
Случай комплексно сопряженных ρ1 и ρ2.
В данном случае неподвижная точка
Пример. Отображение Эно (Henon map)
x, y – динамические переменные, μ и
Пример. Отображение Эно (Henon map)
x, y – динамические переменные, μ и
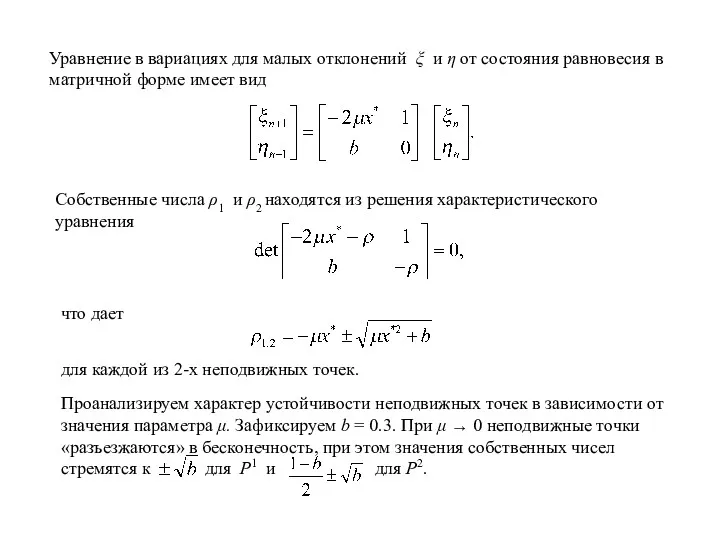
Уравнение в вариациях для малых отклонений ξ и η от состояния
Уравнение в вариациях для малых отклонений ξ и η от состояния
 Решение задач. Составить выражение к задаче
Решение задач. Составить выражение к задаче логические задачи
логические задачи Скобки в числовом выражении
Скобки в числовом выражении Округление десятичных чисел
Округление десятичных чисел Урок 39. Сумма и произведение. Знак умножения.
Урок 39. Сумма и произведение. Знак умножения. Көрсеткіштік теңдеулердің
Көрсеткіштік теңдеулердің Параллельный перенос. Симметрия
Параллельный перенос. Симметрия Авторская мультимедийная игра На что похоже для детей старшего дошкольного возраста.
Авторская мультимедийная игра На что похоже для детей старшего дошкольного возраста. Обыкновенные дроби
Обыкновенные дроби Квадратные уравнения. Решение неполных квадратных уравнений
Квадратные уравнения. Решение неполных квадратных уравнений Тераэдр, параллелепипед
Тераэдр, параллелепипед Порядок действий в выражениях
Порядок действий в выражениях Простые задачи на увеличение числа на несколько единиц
Простые задачи на увеличение числа на несколько единиц Устный счёт к уроку Многозначные числа.Математика. Т.Е.Демидова. 3 класс. Школа 2100.
Устный счёт к уроку Многозначные числа.Математика. Т.Е.Демидова. 3 класс. Школа 2100. Задание В8, открытого банка ЕГЭ по математике
Задание В8, открытого банка ЕГЭ по математике Лекции по теории функции комплексной переменной
Лекции по теории функции комплексной переменной Курс лекций по математике
Курс лекций по математике Математика в сказках. Интегрированный урок по математике и литературе
Математика в сказках. Интегрированный урок по математике и литературе Устный счет по математике
Устный счет по математике Координатная ось
Координатная ось Разложение многочлена на множители способом группировки
Разложение многочлена на множители способом группировки Алгоритмы на графах
Алгоритмы на графах Метод координат. Геометрия 9 класс
Метод координат. Геометрия 9 класс Сложения вида +4
Сложения вида +4 Разность квадратов
Разность квадратов Логарифмы и их свойства
Логарифмы и их свойства Вечер весёлых задач
Вечер весёлых задач Сыбайлас және вертикаль бұрыштар
Сыбайлас және вертикаль бұрыштар