- 3 еркіндік дәрежелі дельта-роботты жобалау және басқару

Содержание
- 2. Дипломдық жобаның мақсаты: дәнекерлеу жұмыстары (сурет салу) палеттеу жүктерді тасымалдау жылтырату толтырғыштарды үлестіру механикалық өңдеу құрастыру
- 3. Дельта робот бір-біріне параллельді орналасқан, 3 моторы бар робот. Моторларын қадамдық қозғалтқышпен немесе серво қозғалтқыштарды пайдалана
- 4. 3 еркіндік дәрежелі дельта-роботтың дәлдігі және қателіктері.
- 5. Роботтың жұмыс аймағының жалпы графикалық көрінісі
- 6. Роботтың жұмыс аймағының жалпы графикалық көрінісі жанынан және төбесінен.
- 7. Дельта роботты Жасау үшін екі функцияны қарастырамыз: finverse(x0, y0, z0) → (Ѳ1, Ѳ2, Ѳ3) кинематикалық кері
- 8. Дельта- Роботтың жалпы сұлбасы
- 9. Дельта роботты құру үшін басты қажет материалдар. Робот бекітілетін тұғыр Робот бекітілетін тұғыр Робот буындары мен
- 10. Дельта-робот бөліктері және сервожетектер Негізгі техникалық сипаттамалары: - Редуктор материалы: пластмасса, 2 шарлы мойынтірек орнатылған -
- 11. Жоғарыда таңдалған материалдардан тәжірибелік үш еркіндік дәрежелі дельта-роботты құрастырамыз. Конструкция бірнеше бөлімнен құралады: 1) негізгі үшбұрышты
- 12. 3 еркіндік дәрежелі дельта роботтың макеті
- 13. «SurgiScope» медициналық микроскопы.
- 14. Өндірістерге арналған дельта робот
- 15. Дельта роботтар қәзіргі таңда өндірістерде көптеп қолдануда.Белгілі бір товарды алып ол товарды белгіленген жерге ешбір заттың
- 16. Fritzing –арқылы қосылу сұлбасы
- 17. Дельта робот 3д принтер
- 21. Скачать презентацию
Дипломдық жобаның мақсаты:
дәнекерлеу жұмыстары (сурет салу)
палеттеу
жүктерді тасымалдау
жылтырату
толтырғыштарды
Дипломдық жобаның мақсаты:
дәнекерлеу жұмыстары (сурет салу)
палеттеу
жүктерді тасымалдау
жылтырату
толтырғыштарды
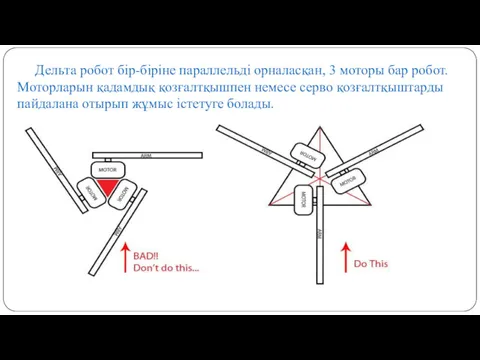
Дельта робот бір-біріне параллельді орналасқан, 3 моторы бар робот. Моторларын қадамдық
Дельта робот бір-біріне параллельді орналасқан, 3 моторы бар робот. Моторларын қадамдық
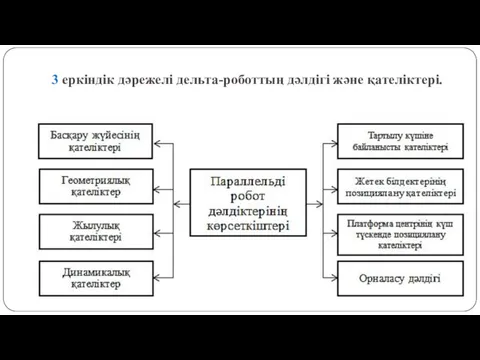
3 еркіндік дәрежелі дельта-роботтың дәлдігі және қателіктері.
3 еркіндік дәрежелі дельта-роботтың дәлдігі және қателіктері.
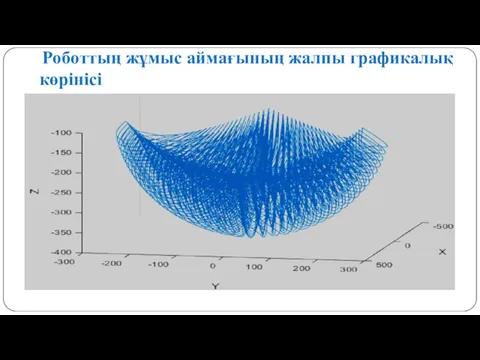
Роботтың жұмыс аймағының жалпы графикалық көрінісі
Роботтың жұмыс аймағының жалпы графикалық көрінісі
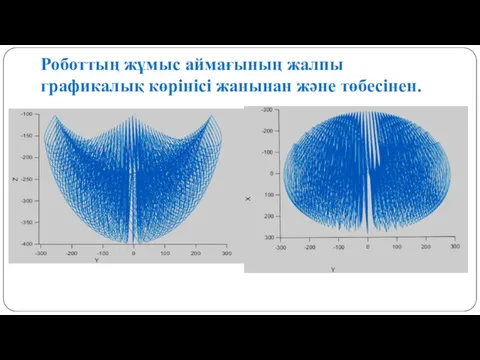
Роботтың жұмыс аймағының жалпы графикалық көрінісі жанынан және төбесінен.
Роботтың жұмыс аймағының жалпы графикалық көрінісі жанынан және төбесінен.
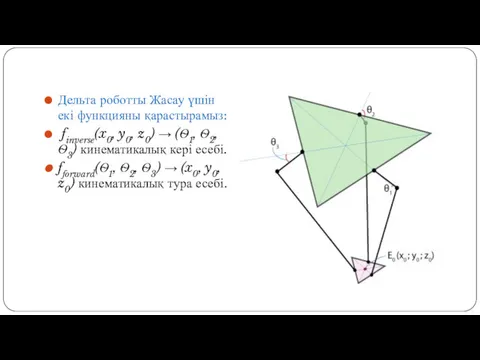
Дельта роботты Жасау үшін екі функцияны қарастырамыз:
finverse(x0, y0, z0) →
Дельта роботты Жасау үшін екі функцияны қарастырамыз:
finverse(x0, y0, z0) →

Дельта- Роботтың жалпы сұлбасы
Дельта- Роботтың жалпы сұлбасы
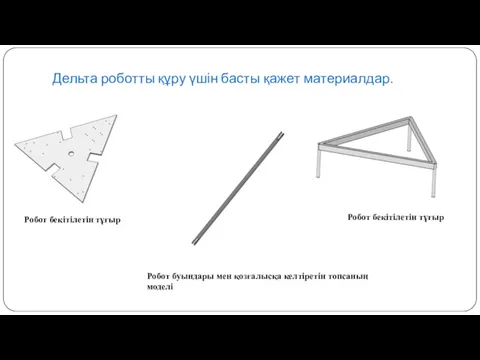
Дельта роботты құру үшін басты қажет материалдар.
Робот бекітілетін тұғыр
Робот бекітілетін тұғыр
Робот
Дельта роботты құру үшін басты қажет материалдар.
Робот бекітілетін тұғыр
Робот бекітілетін тұғыр
Робот

Дельта-робот бөліктері және сервожетектер
Негізгі техникалық сипаттамалары:
- Редуктор материалы: пластмасса, 2 шарлы
Дельта-робот бөліктері және сервожетектер
Негізгі техникалық сипаттамалары:
- Редуктор материалы: пластмасса, 2 шарлы
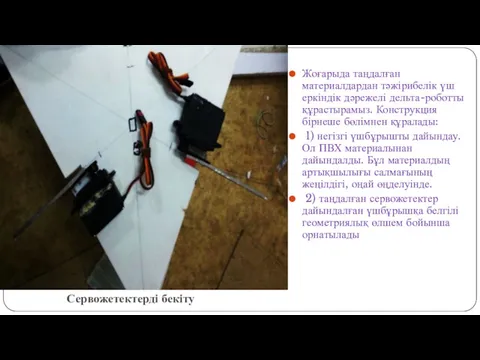
Жоғарыда таңдалған материалдардан тәжірибелік үш еркіндік дәрежелі дельта-роботты құрастырамыз. Конструкция бірнеше
Жоғарыда таңдалған материалдардан тәжірибелік үш еркіндік дәрежелі дельта-роботты құрастырамыз. Конструкция бірнеше
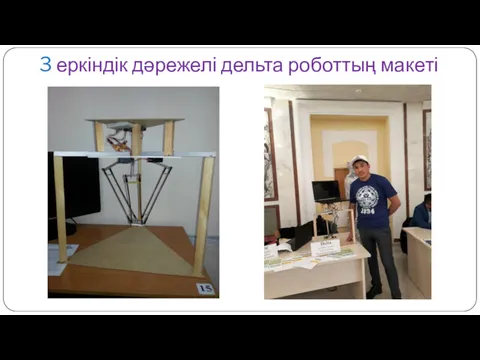
3 еркіндік дәрежелі дельта роботтың макеті
3 еркіндік дәрежелі дельта роботтың макеті

«SurgiScope» медициналық микроскопы.
«SurgiScope» медициналық микроскопы.

Өндірістерге арналған дельта робот
Өндірістерге арналған дельта робот
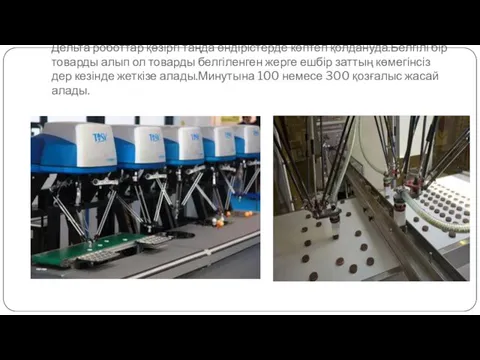
Дельта роботтар қәзіргі таңда өндірістерде көптеп қолдануда.Белгілі бір товарды алып ол
Дельта роботтар қәзіргі таңда өндірістерде көптеп қолдануда.Белгілі бір товарды алып ол
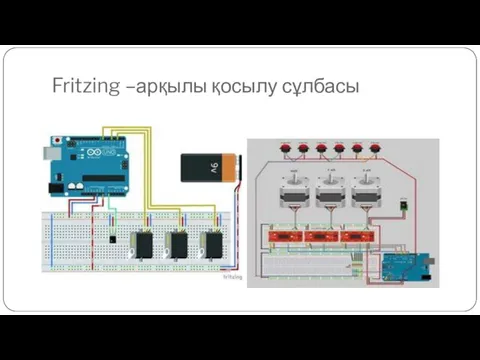
Fritzing –арқылы қосылу сұлбасы
Fritzing –арқылы қосылу сұлбасы

Дельта робот 3д принтер
Дельта робот 3д принтер
 Развитие персонала
Развитие персонала Основы управления персоналом
Основы управления персоналом System reliability
System reliability Менеджмент качества физкультурно-оздоровительных и спортивных услуг: методы определения качества услуг
Менеджмент качества физкультурно-оздоровительных и спортивных услуг: методы определения качества услуг Анализ внутренней и внешней среды при разработке стратегии
Анализ внутренней и внешней среды при разработке стратегии Сущность и содержание менеджмента
Сущность и содержание менеджмента Диаграмма Парето
Диаграмма Парето Лауазымдық нұсқаулық
Лауазымдық нұсқаулық Прединвестиционная фаза проекта
Прединвестиционная фаза проекта Стратегический анализ предприятия
Стратегический анализ предприятия Управленческая деятельность: современные технологии в условиях реализации ФГОС
Управленческая деятельность: современные технологии в условиях реализации ФГОС ВКР: Совершенствование системы управления деятельностью туристской фирмы ООО Инсайт
ВКР: Совершенствование системы управления деятельностью туристской фирмы ООО Инсайт Кадрларды дайындау
Кадрларды дайындау Клиентоориентированность. 3 уровня клиентоориентированности
Клиентоориентированность. 3 уровня клиентоориентированности Виды и технология управленческого консультирования
Виды и технология управленческого консультирования Современные концепции организации
Современные концепции организации Fundamentals of project management
Fundamentals of project management MSF. Microsoft Solutions Framework. (Лекция 10)
MSF. Microsoft Solutions Framework. (Лекция 10) Многомерный стиль руководства
Многомерный стиль руководства Проект переезда в новый офис. Шаблон презентации
Проект переезда в новый офис. Шаблон презентации Совершенствование методов развития персонала организации на примере ООО Венера
Совершенствование методов развития персонала организации на примере ООО Венера Менеджмент в здравоохранении
Менеджмент в здравоохранении Стандарты работы сотрудников автосалонов
Стандарты работы сотрудников автосалонов Автоматизированное управление машиностроительным предприятием
Автоматизированное управление машиностроительным предприятием Управление рисками в IT
Управление рисками в IT Управление рисками, системный анализ и моделирование. Лекции 7-8
Управление рисками, системный анализ и моделирование. Лекции 7-8 Управленческая решетка Блейка-Моутона
Управленческая решетка Блейка-Моутона Стратегический менеджмент
Стратегический менеджмент