- Адаптивное управление движением. (Лекция 8)

Содержание
- 2. ВОПРОСЫ АЛГОРИТМЫ АДАПТИВНОГО УПРАВЛЕНИЯ АЛГОРИТМ АДАПТИВНОГО УПРАВЛЕНИЯ С ПОИСКОМ РАЗРЫВА В ПОТОКЕ ДЕТЕКТОРЫ ТРАНСПОРТА. НАЗНАЧЕНИЕ И
- 3. 1 АЛГОРИТМЫ АДАПТИВНОГО УПРАВЛЕНИЯ
- 4. ВОЗМОЖНЫЕ ЭФФЕКТЫ ОТ АДАПТИВНОГО УПРАВЛЕНИЯ
- 5. ГРУППЫ АЛГОРИТМОВ АДАПТИВНОГО УПРАВЛЕНИЯМ ПО СПОСОБУ ПЕРЕРАБОТКИ ИНФОРМАЦИИ АЛГОРИТМЫ, ПРЕДУСМАТРИВАЮЩИЕ ПЕРЕКЛЮЧЕНИЕ СИГНАЛОВ СВЕТОФОРА ПО ИНФОРМАЦИИ О
- 6. АЛГОРИТМЫ СТАТИЧЕСКОЙ ОПТИМИЗАЦИИ, ПОЗВОЛЯЮЩИЕ ПО ИНФОРМАЦИИ О СОСТОЯНИИ ПЕРЕКРЕСТКА В ДАННЫЙ МОМЕНТ ОПРЕДЕЛИТЬ ПАРАМЕТРЫ УПРАВЛЕНИЯ НА
- 7. АЛГОРИТМЫ СЛУЧАЙНОГО ПОИСКА. ПАРАМЕТРЫ УПРАВЛЕНИЯ ИЗМЕНЯЮТСЯ СЛУЧАЙНО С ОДНОВРЕМЕННЫМ АНАЛИЗОМ КРИТЕРИЯ ЭФФЕКТИВНОСТИ. УПРАВЛЕНИЕ СЧИТАЕТСЯ ЭФФЕКТИВНЫМ ПРИ
- 8. ВИДЫ АЛГОРИТМОВ УПРАВЛЕНИЯ 1 ГРУППЫ АЛГОРИТМ ПОИСКА РАЗРЫВА В ПОТОКЕ В НАПРАВЛЕНИИ ДЕЙСТВИЯ РАЗРЕШАЮЩЕГО СИГНАЛА ПРИ
- 9. АЛГОРИТМ ПОИСКА РАЗРЫВА ПРИ ПЕРЕМЕННЫХ УПРАВЛЯЮЩИХ ПАРАМЕТРАХ, ЗАВИСЯЩИХ ОТ УСЛОВИЙ ДВИЖЕНИЯ АЛГОРИТМЫ СРАВНЕНИЯ ТРАНСПОРТНОЙ ЗАДЕРЖКИ НА
- 10. АЛГОРИТМ, ПРЕДУСМАТРИВАЮЩИЙ ЛИШЬ ПРОПУСК ОЧЕРЕДЕЙ, ОБРАЗОВАВШИХСЯ В ПЕРИОД ДЕЙСТВИЯ ЗАПРЕЩАЮЩЕГО СИГНАЛА АЛГОРИТМ, ПРЕДУСМАТРИВАЮЩИЙ ПЕРЕРАСПРЕДЕЛЕНИЕ ДЛИТЕЛЬНОСТИ ФАЗ
- 11. Достоинства алгоритмов поиска разрывов
- 12. 2 АЛГОРИТМ АДАПТИВНОГО УПРАВЛЕНИЯ С ПОИСКОМ РАЗРЫВА В ПОТОКЕ Минимальная длительность основного такта tз min; Максимальная
- 13. МИНИАЛЬНАЯ ДЛИТЕЛЬНОСТЬ ОСНОВНОГО ТАКТА tз min – время необходимое для пропуска ТС, ожидающих разрешающего сигнала и
- 14. где n0 – число автомобилей, стоящих в ожидании разрешающего сигнала между стоп-линией и в среднем приходящихся
- 15. МАКСИМАЛЬНАЯ ДЛИТЕЛЬНОСТЬ ОСНОВНОГО ТАКТА tз mах – предельное значение длительности зеленого сигнала, исключающее неоправданное по отношению
- 16. tз mах = (1,2÷1,3)t0 (3) где t0 – длительность основного такта данной фазы, рассчитанная для случая
- 17. Экипажное время tэк – интервал, определяющий разрыв в потоке и позволяющий ТС пройти расстояние от детектора
- 18. СЛУЧАИ РЕАЛИЗАЦИИ ПОИСКА РАЗРЫВОВ а – отсутствие автомобилей в течение tз min; б – наличие разрыва
- 19. 3 ДЕТЕКТОРЫ ТРАНСПОРТА. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ ДЕТЕКТОРЫ ТРАНСПОРТА (ДТ) предназначены для обнаружения транспортных средств и определения
- 20. СТРУКТУРНАЯ СХЕМА ДТ ЧЭ – чувствительный элемент (блок обнаружения и ввода сигнала) ВУ – выходное устройство
- 21. КЛАССИФИКАЦИЯ ДТ ПО НАЗНАЧЕНИЮ ПО ПРИНЦИПУ ДЕЙСТВИЯ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПО СПЕЦИАЛИЗАЦИИ (ИЗМЕРЯЕМОМУ ПАРАМЕТРУ) ПРОХОДНЫЕ ПРИСУТСТВИЯ ПОЛНОГО
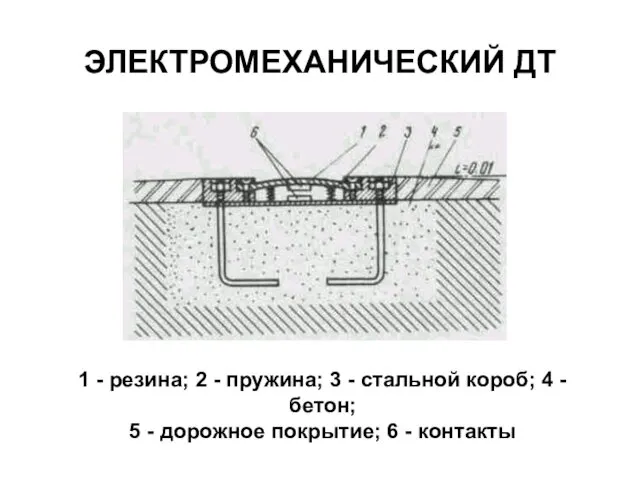
- 22. ЭЛЕКТРОМЕХАНИЧЕСКИЙ ДТ 1 - резина; 2 - пружина; 3 - стальной короб; 4 - бетон; 5
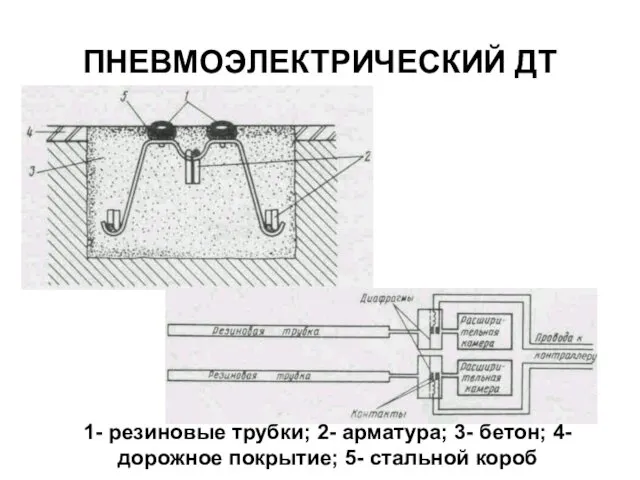
- 23. ПНЕВМОЭЛЕКТРИЧЕСКИЙ ДТ 1- резиновые трубки; 2- арматура; 3- бетон; 4- дорожное покрытие; 5- стальной короб
- 24. ФОТОЭЛЕКТРИЧЕСКИЙ ДТ
- 25. ТЕЛЕВИЗИОННЫЕ ДТ
- 26. ИНДУКТИВНЫЕ ДТ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ИНДУКТИВНОГО ДЕТЕКТОРА 1 – РАМКА; 2 - АВТОМОБИЛЬ
- 27. ИНФРАКРАСНЫЕ ДТ В качестве чувствительного элемента в инфракрасном датчике применён пассивный пироэлектрический элемент, обеспечивающий измерение выходного
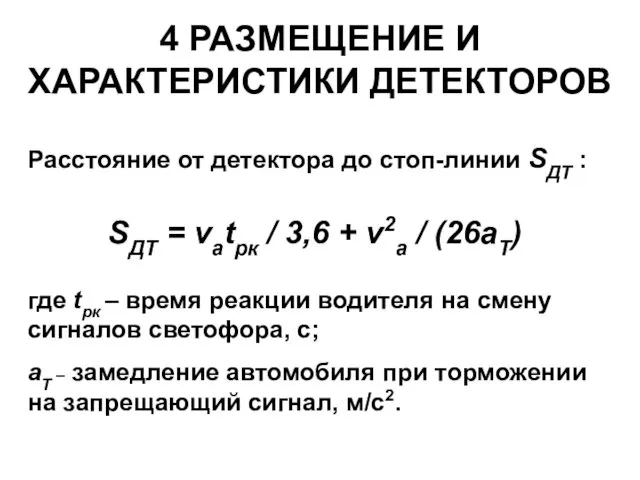
- 28. 4 РАЗМЕЩЕНИЕ И ХАРАКТЕРИСТИКИ ДЕТЕКТОРОВ Расстояние от детектора до стоп-линии SДТ : SДТ = vаtрк /
- 29. Расстояния от места укладки ЧЭ ДТ до стоп-линии
- 30. ВЫБОР МЕСТА РАСПОЛОЖЕНИЯ ДТ Расположение ДТ у перекрестков для реализации локальных и тактических алгоритмов управления и
- 31. Расположение ДТ для обнаружения заторов. ДТ размещают в точках, где располагаемый «конец» очереди может блокировать предыдущий
- 32. ОСНОВНЫЕ ПАРАМЕТРЫ ТРАНСПОРТНОГО ПОТОКА ПОДЛЕЖАЩИЕ РЕГИСТРАЦИИ ДТ Моменты времени проезда АТС заданных сечений дороги; Интенсивность ТП
- 33. Схема измерения времени проезда мерной базы с помощью проходных детекторов
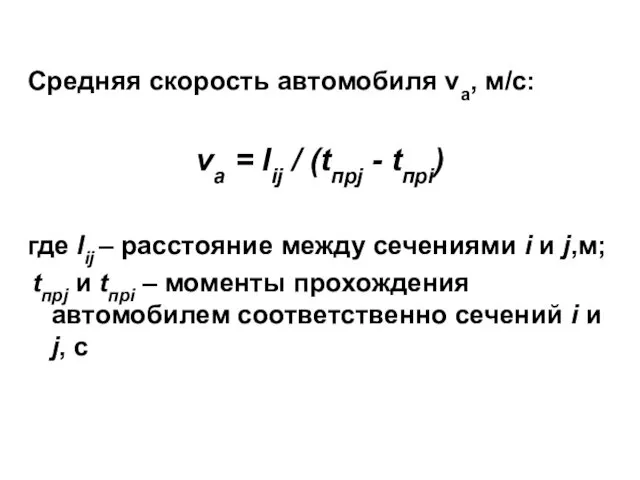
- 34. Средняя скорость автомобиля va, м/с: va = lij / (tпрj - tпрi) где lij – расстояние
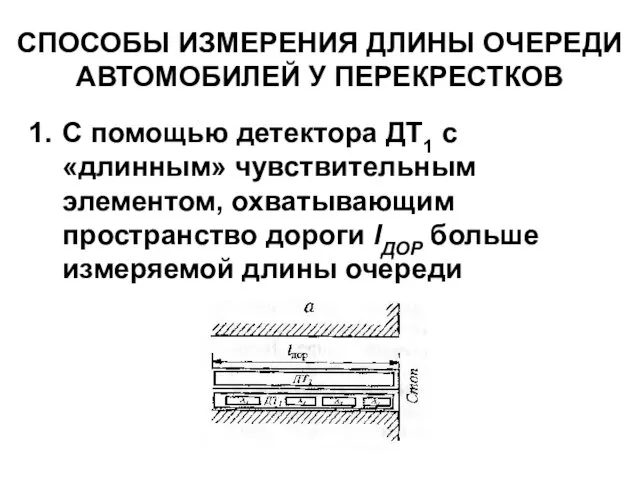
- 35. СПОСОБЫ ИЗМЕРЕНИЯ ДЛИНЫ ОЧЕРЕДИ АВТОМОБИЛЕЙ У ПЕРЕКРЕСТКОВ С помощью детектора ДТ1 с «длинным» чувствительным элементом, охватывающим
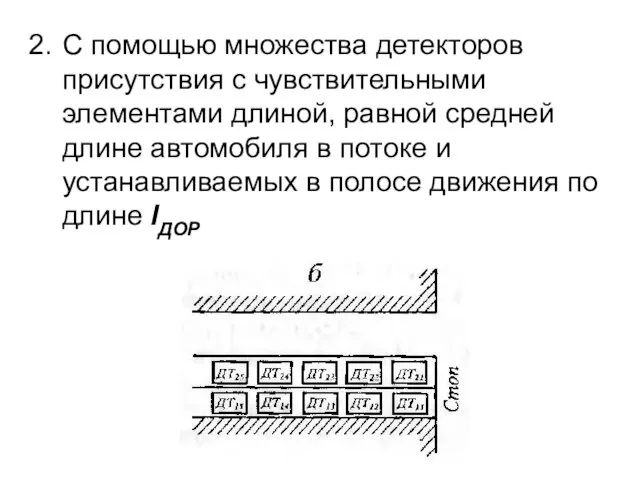
- 36. С помощью множества детекторов присутствия с чувствительными элементами длиной, равной средней длине автомобиля в потоке и
- 37. С помощью детекторов присутствия, устанавливаемых в определенных «граничных» сечениях 1 дороги и измеряющих занятость дороги в
- 39. Скачать презентацию
ВОПРОСЫ
АЛГОРИТМЫ АДАПТИВНОГО УПРАВЛЕНИЯ
АЛГОРИТМ АДАПТИВНОГО УПРАВЛЕНИЯ С ПОИСКОМ РАЗРЫВА В ПОТОКЕ
ДЕТЕКТОРЫ ТРАНСПОРТА.
ВОПРОСЫ
АЛГОРИТМЫ АДАПТИВНОГО УПРАВЛЕНИЯ
АЛГОРИТМ АДАПТИВНОГО УПРАВЛЕНИЯ С ПОИСКОМ РАЗРЫВА В ПОТОКЕ
ДЕТЕКТОРЫ ТРАНСПОРТА.

1 АЛГОРИТМЫ АДАПТИВНОГО УПРАВЛЕНИЯ
1 АЛГОРИТМЫ АДАПТИВНОГО УПРАВЛЕНИЯ

ВОЗМОЖНЫЕ ЭФФЕКТЫ ОТ АДАПТИВНОГО УПРАВЛЕНИЯ
ВОЗМОЖНЫЕ ЭФФЕКТЫ ОТ АДАПТИВНОГО УПРАВЛЕНИЯ
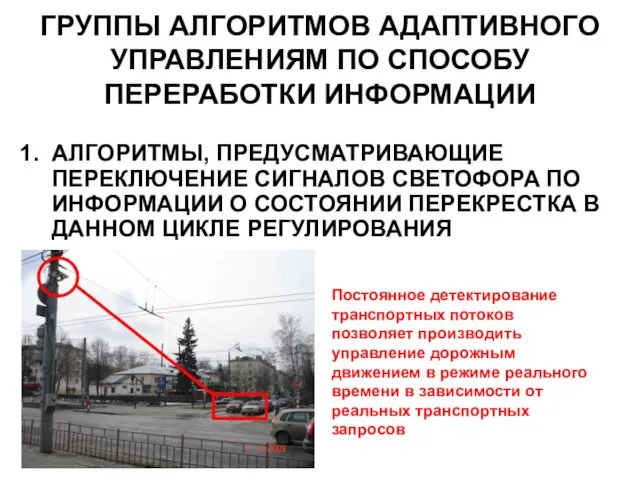
ГРУППЫ АЛГОРИТМОВ АДАПТИВНОГО УПРАВЛЕНИЯМ ПО СПОСОБУ ПЕРЕРАБОТКИ ИНФОРМАЦИИ
АЛГОРИТМЫ, ПРЕДУСМАТРИВАЮЩИЕ ПЕРЕКЛЮЧЕНИЕ СИГНАЛОВ
ГРУППЫ АЛГОРИТМОВ АДАПТИВНОГО УПРАВЛЕНИЯМ ПО СПОСОБУ ПЕРЕРАБОТКИ ИНФОРМАЦИИ
АЛГОРИТМЫ, ПРЕДУСМАТРИВАЮЩИЕ ПЕРЕКЛЮЧЕНИЕ СИГНАЛОВ
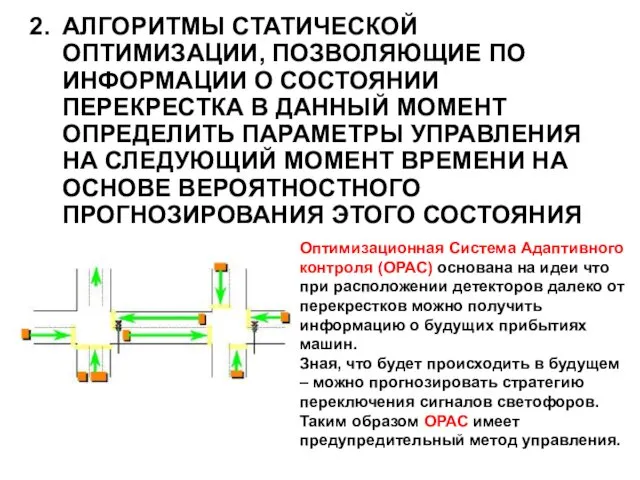
АЛГОРИТМЫ СТАТИЧЕСКОЙ ОПТИМИЗАЦИИ, ПОЗВОЛЯЮЩИЕ ПО ИНФОРМАЦИИ О СОСТОЯНИИ ПЕРЕКРЕСТКА В ДАННЫЙ
АЛГОРИТМЫ СТАТИЧЕСКОЙ ОПТИМИЗАЦИИ, ПОЗВОЛЯЮЩИЕ ПО ИНФОРМАЦИИ О СОСТОЯНИИ ПЕРЕКРЕСТКА В ДАННЫЙ
АЛГОРИТМЫ СЛУЧАЙНОГО ПОИСКА. ПАРАМЕТРЫ УПРАВЛЕНИЯ ИЗМЕНЯЮТСЯ СЛУЧАЙНО С ОДНОВРЕМЕННЫМ АНАЛИЗОМ КРИТЕРИЯ
АЛГОРИТМЫ СЛУЧАЙНОГО ПОИСКА. ПАРАМЕТРЫ УПРАВЛЕНИЯ ИЗМЕНЯЮТСЯ СЛУЧАЙНО С ОДНОВРЕМЕННЫМ АНАЛИЗОМ КРИТЕРИЯ
ВИДЫ АЛГОРИТМОВ УПРАВЛЕНИЯ
1 ГРУППЫ
АЛГОРИТМ ПОИСКА РАЗРЫВА В ПОТОКЕ В НАПРАВЛЕНИИ
ВИДЫ АЛГОРИТМОВ УПРАВЛЕНИЯ
1 ГРУППЫ
АЛГОРИТМ ПОИСКА РАЗРЫВА В ПОТОКЕ В НАПРАВЛЕНИИ
АЛГОРИТМ ПОИСКА РАЗРЫВА ПРИ ПЕРЕМЕННЫХ УПРАВЛЯЮЩИХ ПАРАМЕТРАХ, ЗАВИСЯЩИХ ОТ УСЛОВИЙ ДВИЖЕНИЯ
АЛГОРИТМЫ
АЛГОРИТМ ПОИСКА РАЗРЫВА ПРИ ПЕРЕМЕННЫХ УПРАВЛЯЮЩИХ ПАРАМЕТРАХ, ЗАВИСЯЩИХ ОТ УСЛОВИЙ ДВИЖЕНИЯ
АЛГОРИТМЫ
АЛГОРИТМ, ПРЕДУСМАТРИВАЮЩИЙ ЛИШЬ ПРОПУСК ОЧЕРЕДЕЙ, ОБРАЗОВАВШИХСЯ В ПЕРИОД ДЕЙСТВИЯ ЗАПРЕЩАЮЩЕГО СИГНАЛА
АЛГОРИТМ,
АЛГОРИТМ, ПРЕДУСМАТРИВАЮЩИЙ ЛИШЬ ПРОПУСК ОЧЕРЕДЕЙ, ОБРАЗОВАВШИХСЯ В ПЕРИОД ДЕЙСТВИЯ ЗАПРЕЩАЮЩЕГО СИГНАЛА
АЛГОРИТМ,
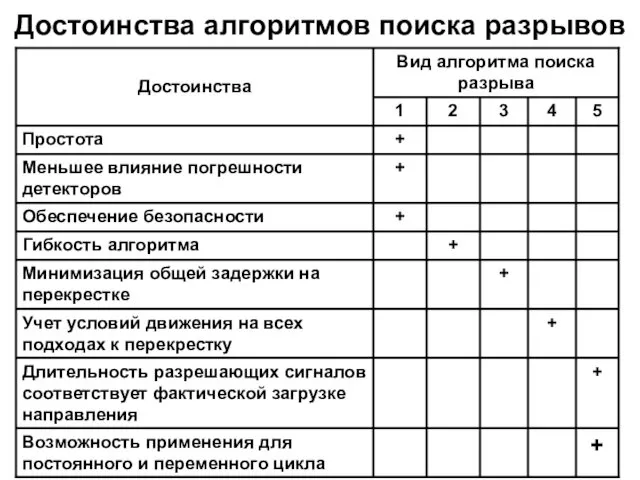
Достоинства алгоритмов поиска разрывов
Достоинства алгоритмов поиска разрывов
2 АЛГОРИТМ АДАПТИВНОГО УПРАВЛЕНИЯ С ПОИСКОМ РАЗРЫВА В ПОТОКЕ
Минимальная длительность основного
2 АЛГОРИТМ АДАПТИВНОГО УПРАВЛЕНИЯ С ПОИСКОМ РАЗРЫВА В ПОТОКЕ
Минимальная длительность основного
МИНИАЛЬНАЯ ДЛИТЕЛЬНОСТЬ ОСНОВНОГО ТАКТА tз min – время необходимое для пропуска
МИНИАЛЬНАЯ ДЛИТЕЛЬНОСТЬ ОСНОВНОГО ТАКТА tз min – время необходимое для пропуска
где n0 – число автомобилей, стоящих в ожидании разрешающего сигнала между
где n0 – число автомобилей, стоящих в ожидании разрешающего сигнала между
МАКСИМАЛЬНАЯ ДЛИТЕЛЬНОСТЬ ОСНОВНОГО ТАКТА tз mах – предельное значение длительности зеленого
МАКСИМАЛЬНАЯ ДЛИТЕЛЬНОСТЬ ОСНОВНОГО ТАКТА tз mах – предельное значение длительности зеленого
tз mах = (1,2÷1,3)t0
(3)
где t0 – длительность основного такта данной фазы,
tз mах = (1,2÷1,3)t0
(3)
где t0 – длительность основного такта данной фазы,
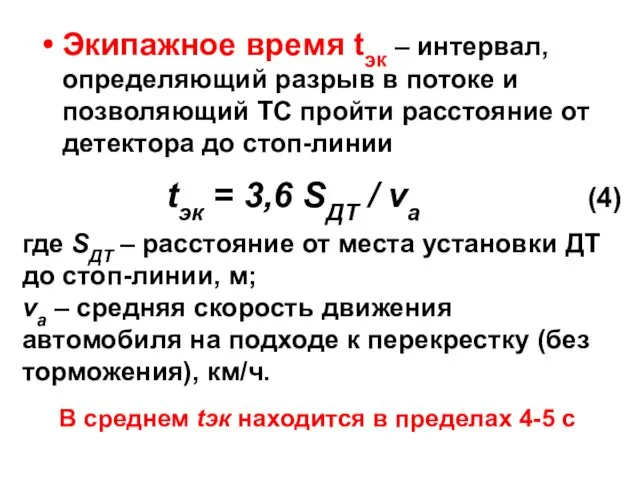
Экипажное время tэк – интервал, определяющий разрыв в потоке и позволяющий
Экипажное время tэк – интервал, определяющий разрыв в потоке и позволяющий

СЛУЧАИ РЕАЛИЗАЦИИ ПОИСКА РАЗРЫВОВ
а – отсутствие автомобилей в течение tз min;
СЛУЧАИ РЕАЛИЗАЦИИ ПОИСКА РАЗРЫВОВ
а – отсутствие автомобилей в течение tз min;
3 ДЕТЕКТОРЫ ТРАНСПОРТА. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ
ДЕТЕКТОРЫ ТРАНСПОРТА (ДТ) предназначены для обнаружения
3 ДЕТЕКТОРЫ ТРАНСПОРТА. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ
ДЕТЕКТОРЫ ТРАНСПОРТА (ДТ) предназначены для обнаружения
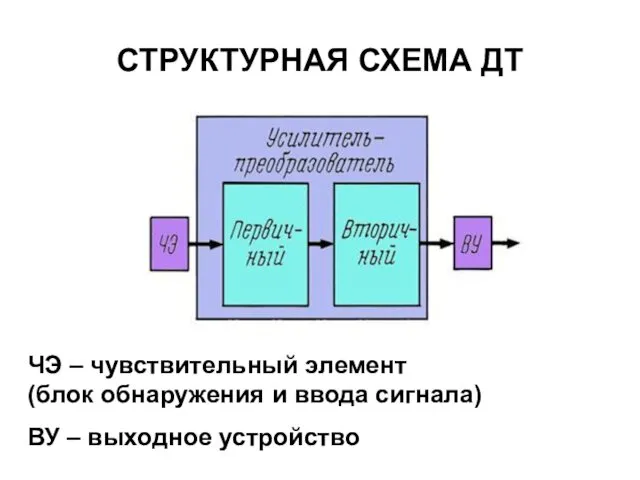
СТРУКТУРНАЯ СХЕМА ДТ
ЧЭ – чувствительный элемент (блок обнаружения и ввода сигнала)
ВУ
СТРУКТУРНАЯ СХЕМА ДТ
ЧЭ – чувствительный элемент (блок обнаружения и ввода сигнала)
ВУ

КЛАССИФИКАЦИЯ ДТ
ПО НАЗНАЧЕНИЮ
ПО ПРИНЦИПУ ДЕЙСТВИЯ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА
ПО СПЕЦИАЛИЗАЦИИ (ИЗМЕРЯЕМОМУ ПАРАМЕТРУ)
ПРОХОДНЫЕ
ПРИСУТСТВИЯ
ПОЛНОГО
ОГРАНИЧЕННОГО
КОНТАКТНОГО ТИПА
ИЗЛУЧЕНИЯ
ИЗМЕРЕНИЯ
КЛАССИФИКАЦИЯ ДТ
ПО НАЗНАЧЕНИЮ
ПО ПРИНЦИПУ ДЕЙСТВИЯ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА
ПО СПЕЦИАЛИЗАЦИИ (ИЗМЕРЯЕМОМУ ПАРАМЕТРУ)
ПРОХОДНЫЕ
ПРИСУТСТВИЯ
ПОЛНОГО
ОГРАНИЧЕННОГО
КОНТАКТНОГО ТИПА
ИЗЛУЧЕНИЯ
ИЗМЕРЕНИЯ
ЭЛЕКТРОМЕХАНИЧЕСКИЙ ДТ
1 - резина; 2 - пружина; 3 - стальной
ЭЛЕКТРОМЕХАНИЧЕСКИЙ ДТ
1 - резина; 2 - пружина; 3 - стальной
ПНЕВМОЭЛЕКТРИЧЕСКИЙ ДТ
1- резиновые трубки; 2- арматура; 3- бетон; 4- дорожное
ПНЕВМОЭЛЕКТРИЧЕСКИЙ ДТ
1- резиновые трубки; 2- арматура; 3- бетон; 4- дорожное
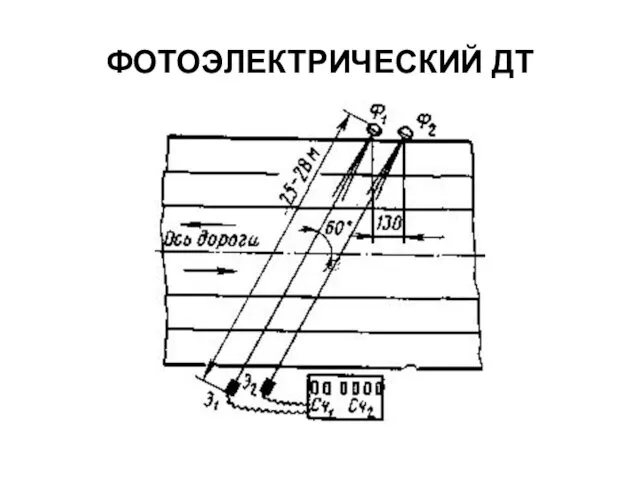
ФОТОЭЛЕКТРИЧЕСКИЙ ДТ
ФОТОЭЛЕКТРИЧЕСКИЙ ДТ

ТЕЛЕВИЗИОННЫЕ ДТ
ТЕЛЕВИЗИОННЫЕ ДТ

ИНДУКТИВНЫЕ ДТ
ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ИНДУКТИВНОГО ДЕТЕКТОРА
1 – РАМКА; 2 - АВТОМОБИЛЬ
ИНДУКТИВНЫЕ ДТ
ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ИНДУКТИВНОГО ДЕТЕКТОРА
1 – РАМКА; 2 - АВТОМОБИЛЬ

ИНФРАКРАСНЫЕ ДТ
В качестве чувствительного элемента в инфракрасном датчике применён пассивный пироэлектрический
ИНФРАКРАСНЫЕ ДТ
В качестве чувствительного элемента в инфракрасном датчике применён пассивный пироэлектрический
4 РАЗМЕЩЕНИЕ И ХАРАКТЕРИСТИКИ ДЕТЕКТОРОВ
Расстояние от детектора до стоп-линии SДТ :
SДТ
4 РАЗМЕЩЕНИЕ И ХАРАКТЕРИСТИКИ ДЕТЕКТОРОВ
Расстояние от детектора до стоп-линии SДТ :
SДТ
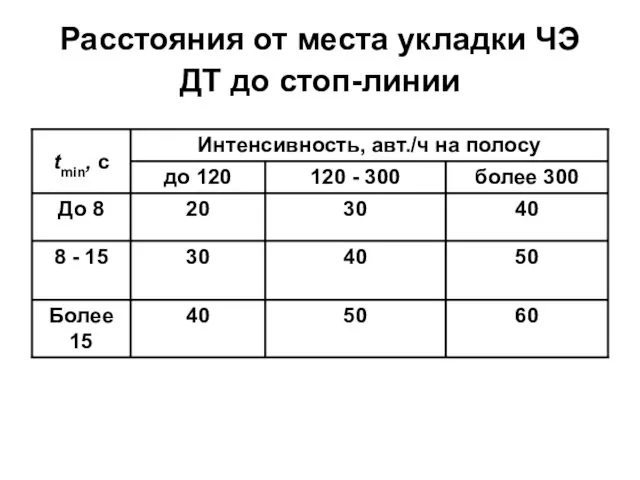
Расстояния от места укладки ЧЭ ДТ до стоп-линии
Расстояния от места укладки ЧЭ ДТ до стоп-линии
ВЫБОР МЕСТА РАСПОЛОЖЕНИЯ ДТ
Расположение ДТ у перекрестков для реализации локальных и
ВЫБОР МЕСТА РАСПОЛОЖЕНИЯ ДТ
Расположение ДТ у перекрестков для реализации локальных и
Расположение ДТ для обнаружения заторов. ДТ размещают в точках, где располагаемый
Расположение ДТ для обнаружения заторов. ДТ размещают в точках, где располагаемый
ОСНОВНЫЕ ПАРАМЕТРЫ ТРАНСПОРТНОГО ПОТОКА ПОДЛЕЖАЩИЕ РЕГИСТРАЦИИ ДТ
Моменты времени проезда АТС заданных
ОСНОВНЫЕ ПАРАМЕТРЫ ТРАНСПОРТНОГО ПОТОКА ПОДЛЕЖАЩИЕ РЕГИСТРАЦИИ ДТ
Моменты времени проезда АТС заданных
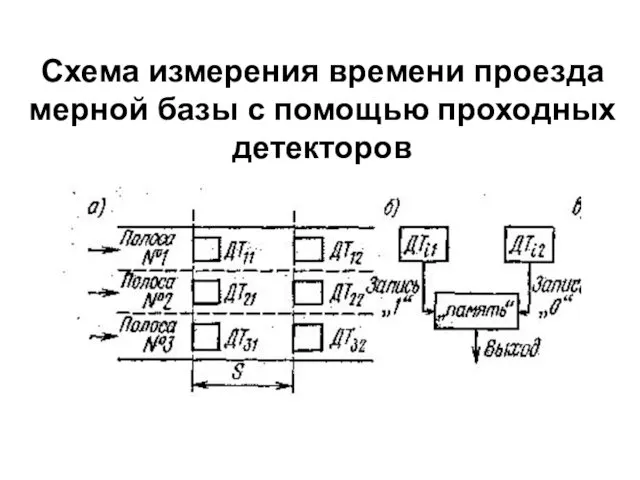
Схема измерения времени проезда мерной базы с помощью проходных детекторов
Схема измерения времени проезда мерной базы с помощью проходных детекторов
Средняя скорость автомобиля va, м/с:
va = lij / (tпрj - tпрi)
где
Средняя скорость автомобиля va, м/с:
va = lij / (tпрj - tпрi)
где
СПОСОБЫ ИЗМЕРЕНИЯ ДЛИНЫ ОЧЕРЕДИ АВТОМОБИЛЕЙ У ПЕРЕКРЕСТКОВ
С помощью детектора ДТ1 с
СПОСОБЫ ИЗМЕРЕНИЯ ДЛИНЫ ОЧЕРЕДИ АВТОМОБИЛЕЙ У ПЕРЕКРЕСТКОВ
С помощью детектора ДТ1 с
С помощью множества детекторов присутствия с чувствительными элементами длиной, равной средней
С помощью множества детекторов присутствия с чувствительными элементами длиной, равной средней
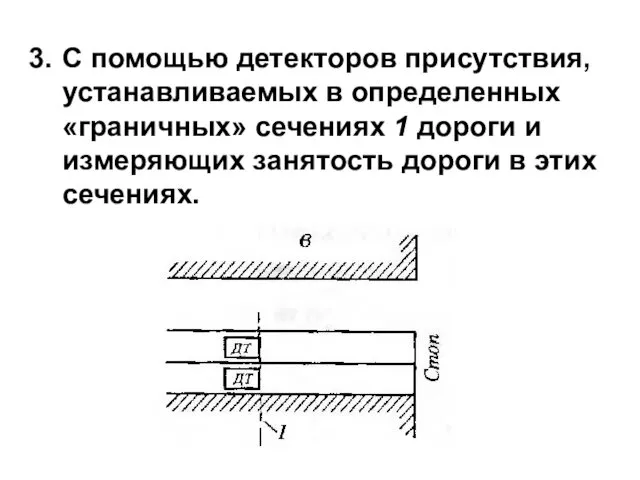
С помощью детекторов присутствия, устанавливаемых в определенных «граничных» сечениях 1 дороги
С помощью детекторов присутствия, устанавливаемых в определенных «граничных» сечениях 1 дороги
 Страны Северной Европы
Страны Северной Европы Ұлпа қабынуы туралы түсінік ұлпа қабынуын емдеу әдістері, тіс ұлпасының девитализациясы
Ұлпа қабынуы туралы түсінік ұлпа қабынуын емдеу әдістері, тіс ұлпасының девитализациясы Родительское собрание на тему Воспитание самостоятельности
Родительское собрание на тему Воспитание самостоятельности Лекция №4. Профилактика туберкулеза. Организация медицинской помощи больным туберкулезом
Лекция №4. Профилактика туберкулеза. Организация медицинской помощи больным туберкулезом Предмет химии
Предмет химии Дигибридное скрещивание
Дигибридное скрещивание Моделирование систем. Управление рисками, системный анализ и моделирование. Лекции 11-12
Моделирование систем. Управление рисками, системный анализ и моделирование. Лекции 11-12 Презентация Нравственные качества, ОРКСЭ, урок №7, учебник Шемшуриной (Дрофа), 4 класс
Презентация Нравственные качества, ОРКСЭ, урок №7, учебник Шемшуриной (Дрофа), 4 класс Туркменистан - государство в Центральной Азии
Туркменистан - государство в Центральной Азии Россия при первых Романовых: перемены в государственном устройстве
Россия при первых Романовых: перемены в государственном устройстве Тайна имени Екатерина
Тайна имени Екатерина Будущая профессия – тренер по боксу
Будущая профессия – тренер по боксу Моя любимая и лучшая подруга
Моя любимая и лучшая подруга Обработка деталей на станках с программным управлением
Обработка деталей на станках с программным управлением Дидактическая игра-тренажёр Щенок и чудак
Дидактическая игра-тренажёр Щенок и чудак Выступление на педсовете Подготовка учащихся 9, 10, 11 классов к ГИА и ЕГЭ
Выступление на педсовете Подготовка учащихся 9, 10, 11 классов к ГИА и ЕГЭ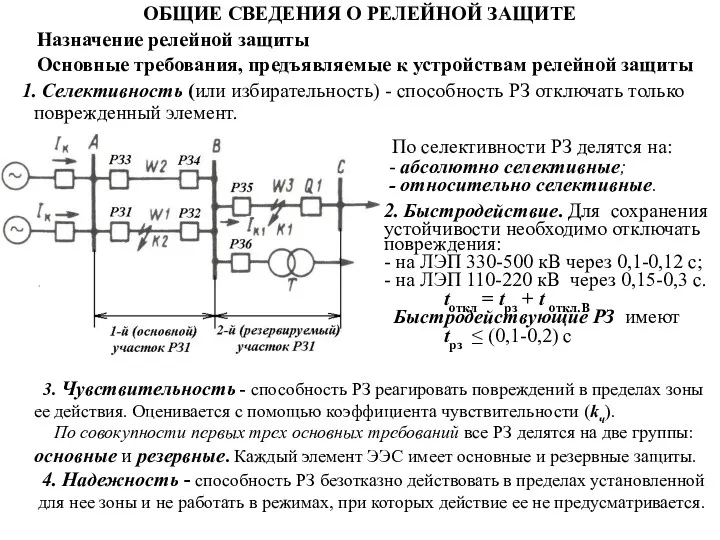 Общие сведения о релейной защите
Общие сведения о релейной защите Вода.
Вода. ОСНОВНЫЕ ВИДЫ МУЗЫКАЛЬНЫХ ИГРУШЕК В РАЗНЫХ ВОЗРАСТНЫХ ГРУППАХ
ОСНОВНЫЕ ВИДЫ МУЗЫКАЛЬНЫХ ИГРУШЕК В РАЗНЫХ ВОЗРАСТНЫХ ГРУППАХ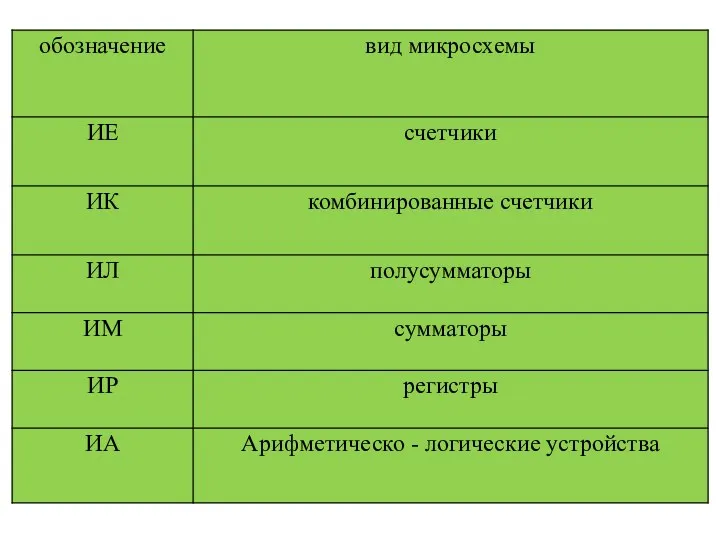 Характеристики интегральных схем (ИС)
Характеристики интегральных схем (ИС) Қан топтары. Қан құю әдісі
Қан топтары. Қан құю әдісі ГО ВПО Донецкий национальный университет экономики и торговли имени Михаила Туганбарановского. Кафедра международной экономики
ГО ВПО Донецкий национальный университет экономики и торговли имени Михаила Туганбарановского. Кафедра международной экономики Антропометрическое соответствие одежды
Антропометрическое соответствие одежды Истеъмолчиларга ичимлик суви ва оқова сув хизматларини кўрсатиш қоидалари
Истеъмолчиларга ичимлик суви ва оқова сув хизматларини кўрсатиш қоидалари Обновления в CSS3
Обновления в CSS3 презентация Листопад
презентация Листопад Организация оказания медицинской помощи детям Заягорбского района
Организация оказания медицинской помощи детям Заягорбского района Гигиена. Понятие. Этапы. Задачи
Гигиена. Понятие. Этапы. Задачи