Автоматизация сушильной части КДМ с разработкой САУ влажности полотна после сушильной части презентация
- Автоматизация сушильной части КДМ с разработкой САУ влажности полотна после сушильной части

Содержание
- 2. Цели и задачи Целями и задачами курсового проекта являются: Анализ и усовершенствование сушильной части КДМ для
- 3. Технологическая схема сушильной части КДМ Технологическая схема сушильной части КДМ изображена на рис. 1. Рис. 1.
- 4. Требования к разрабатываемой АСР Основные требования к системе управления: Стабилизация давления в ведущей сушильной группе –
- 5. Выбор технических средств В качестве средств автоматизации были выбраны следующие технические средства: Контроллер Mitsubishi FX3U; Проходные
- 6. Техническая структура Техническая структура сушильной части КДМ изображена на рис. 2. Рис. 2. Техническая структура сушильной
- 7. Алгоритмическая схема математической модели САУ Алгоритмическая схема сушильной части КДМ для контактной сушки картонного полотна изображена
- 8. Алгоритмическая структурная схема САУ Алгоритмическая структурная схема сушильной части КДМ для контактной сушки картонного полотна изображена
- 9. Схема моделирования Схема моделирования САУ влажности полотна после сушильной части созданная пакете Simulink программного комплекса Mat
- 10. Расчет настроек регулятора Оптимальные настройки регулятора: Р = -167.9376, I = -1.1069. Переходный процесс и настройки
- 11. Сравнение полученных характеристик и анализ качества Сравнение полученных характеристик представлены в Таблице 1, анализ качества каскадной
- 12. Функциональная схема автоматизации Функциональная схема автоматизации регулирования влажности полотна после сушильной части КДМ изображена на рис.
- 13. Выводы В курсовом проекте была усовершенствована система управления сушильной частью КДМ, разработана функциональная схема на базе
- 15. Скачать презентацию
Цели и задачи
Целями и задачами курсового проекта являются:
Анализ и усовершенствование сушильной
Цели и задачи
Целями и задачами курсового проекта являются:
Анализ и усовершенствование сушильной

Технологическая схема сушильной части КДМ
Технологическая схема сушильной части КДМ изображена на
Технологическая схема сушильной части КДМ
Технологическая схема сушильной части КДМ изображена на
Требования к разрабатываемой АСР
Основные требования к системе управления:
Стабилизация давления в ведущей
Требования к разрабатываемой АСР
Основные требования к системе управления:
Стабилизация давления в ведущей
Выбор технических средств
В качестве средств автоматизации были выбраны следующие технические средства:
Контроллер
Выбор технических средств
В качестве средств автоматизации были выбраны следующие технические средства:
Контроллер

Техническая структура
Техническая структура сушильной части КДМ изображена на рис. 2.
Рис. 2.
Техническая структура
Техническая структура сушильной части КДМ изображена на рис. 2.
Рис. 2.
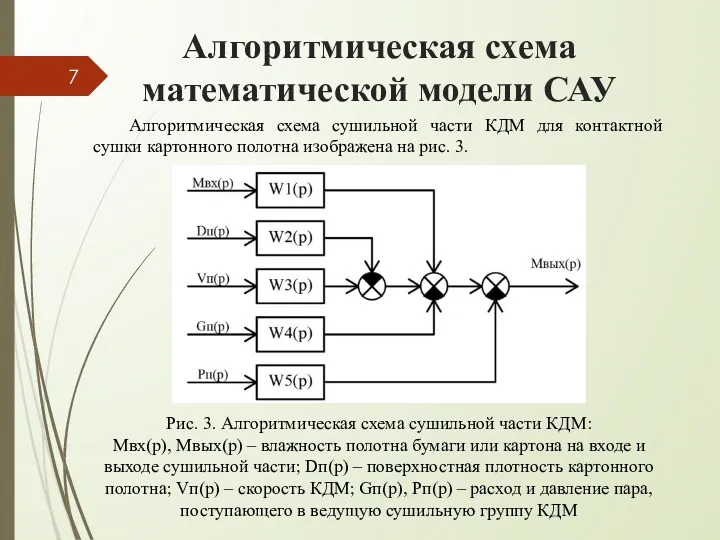
Алгоритмическая схема математической модели САУ
Алгоритмическая схема сушильной части КДМ для контактной
Алгоритмическая схема математической модели САУ
Алгоритмическая схема сушильной части КДМ для контактной
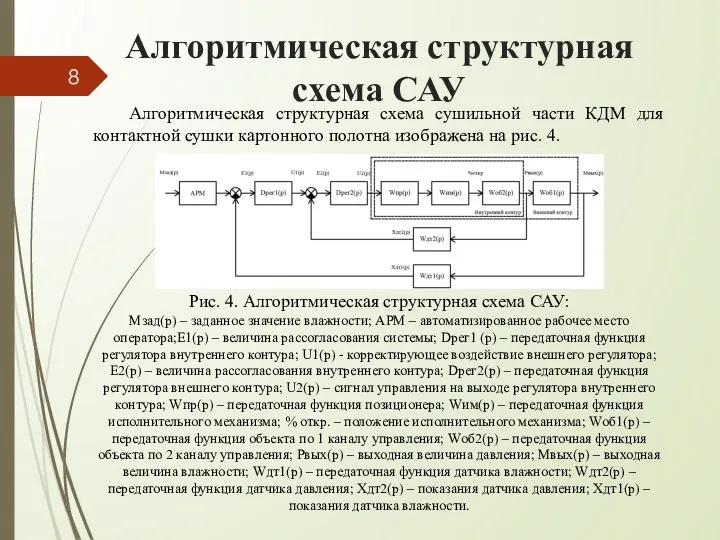
Алгоритмическая структурная схема САУ
Алгоритмическая структурная схема сушильной части КДМ для контактной
Алгоритмическая структурная схема САУ
Алгоритмическая структурная схема сушильной части КДМ для контактной
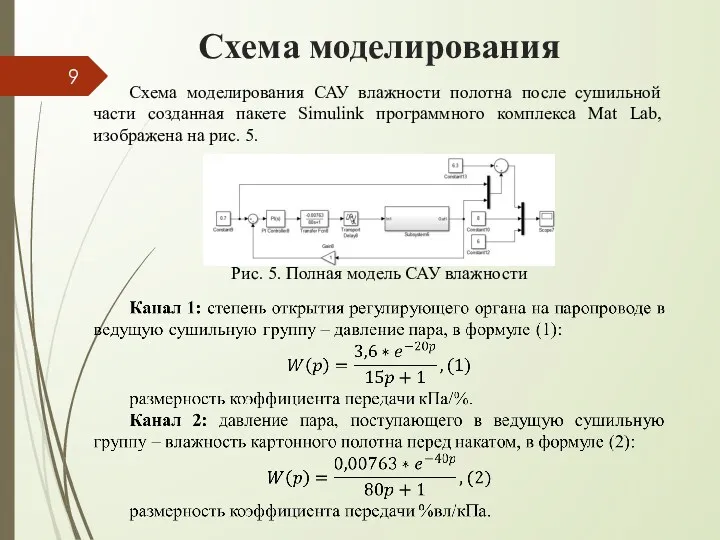
Схема моделирования
Схема моделирования САУ влажности полотна после сушильной части созданная пакете
Схема моделирования
Схема моделирования САУ влажности полотна после сушильной части созданная пакете
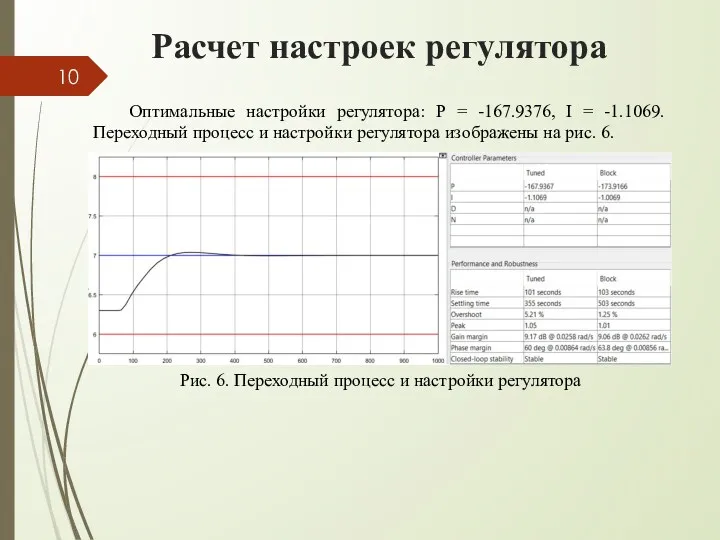
Расчет настроек регулятора
Оптимальные настройки регулятора: Р = -167.9376, I = -1.1069.
Расчет настроек регулятора
Оптимальные настройки регулятора: Р = -167.9376, I = -1.1069.
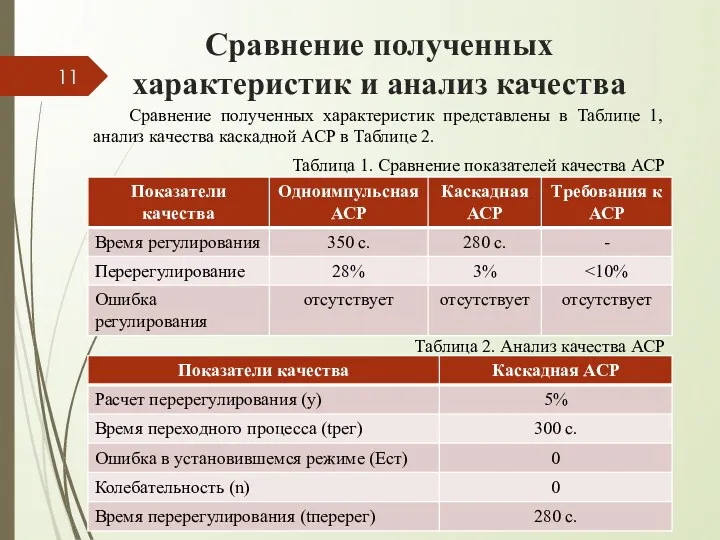
Сравнение полученных характеристик и анализ качества
Сравнение полученных характеристик представлены в Таблице
Сравнение полученных характеристик и анализ качества
Сравнение полученных характеристик представлены в Таблице

Функциональная схема автоматизации
Функциональная схема автоматизации регулирования влажности полотна после сушильной части
Функциональная схема автоматизации
Функциональная схема автоматизации регулирования влажности полотна после сушильной части
Выводы
В курсовом проекте была усовершенствована система управления сушильной частью КДМ, разработана
Выводы
В курсовом проекте была усовершенствована система управления сушильной частью КДМ, разработана
 Предмет, функции и объект исследования социологии
Предмет, функции и объект исследования социологии Великая Отечественная война (1941-1945 гг)
Великая Отечественная война (1941-1945 гг) День защитника Отечества
День защитника Отечества Дифференциация звуков Ш-Ж
Дифференциация звуков Ш-Ж Шаблон (фон) презентации. Часть 30
Шаблон (фон) презентации. Часть 30 Нормирование ледовой нагрузки
Нормирование ледовой нагрузки Игра Разговор о правильном питании
Игра Разговор о правильном питании 20231011_prosteyshie_zadachi_v_koordinatah
20231011_prosteyshie_zadachi_v_koordinatah Резолюция IATA 320
Резолюция IATA 320 Стромалық-қантамырлық дистрофиялар дәнекер тінде зат ал-масуының бүзылуымен, осыган байланысты агзалар
Стромалық-қантамырлық дистрофиялар дәнекер тінде зат ал-масуының бүзылуымен, осыган байланысты агзалар Христианство. Источники вероучения
Христианство. Источники вероучения Инновационное материаловедение
Инновационное материаловедение Part 1_ Global International Financial Institutions
Part 1_ Global International Financial Institutions Налог на доходы физических лиц
Налог на доходы физических лиц Маточные средства
Маточные средства Публичная презентация результатов педагогической деятельности
Публичная презентация результатов педагогической деятельности Международные отношения в 1920-1930-х годах
Международные отношения в 1920-1930-х годах Био-Психо-Социо-Духовная концепция заболевания химической зависимости (БПСД)
Био-Психо-Социо-Духовная концепция заболевания химической зависимости (БПСД) Интерактивный кроссворд Водоёмы, география 6 класс
Интерактивный кроссворд Водоёмы, география 6 класс Развитие лексико - грамматического строя речи для детей (4 - 7 лет) презентация. Тема: Дикие животные наших лесов
Развитие лексико - грамматического строя речи для детей (4 - 7 лет) презентация. Тема: Дикие животные наших лесов Антиадренергические лекарственные средства
Антиадренергические лекарственные средства Джаз-танец
Джаз-танец Презетация Вытынанки
Презетация Вытынанки Определение суточного рациона питания по энергетической ценности пищевых продуктов
Определение суточного рациона питания по энергетической ценности пищевых продуктов Инновационные интернет-технологии для субъектов малого бизнеса
Инновационные интернет-технологии для субъектов малого бизнеса Анализ финансовой отчетности
Анализ финансовой отчетности Управление хозяйством электроснабжения
Управление хозяйством электроснабжения Шишкин Иван Иванович (1832-1898)
Шишкин Иван Иванович (1832-1898)