- Датчик касания конструктора lego mindstorms ev3

Содержание
- 2. В состав конструктора Lego mindstorms EV3 входят различные датчики. Главная задача датчиков - представлять информацию из
- 4. 4.1. Изучаем первый датчик – датчик касания Для подключения датчиков к модулю EV3 предназначены порты, обозначенные
- 5. Первым датчиком, который мы изучим, будет датчик касания (Рис. 2). Этот датчик, по сути, представляет собой
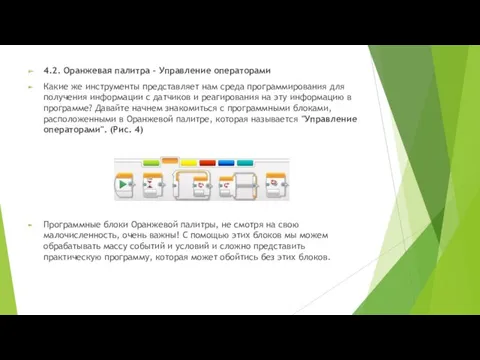
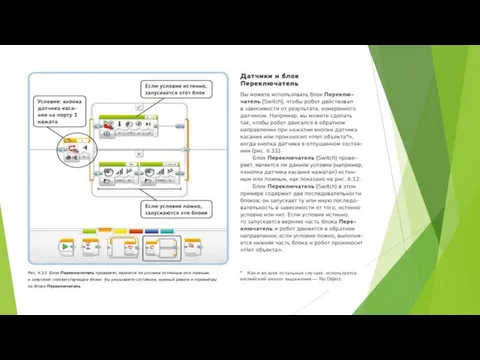
- 6. 4.2. Оранжевая палитра – Управление операторами Какие же инструменты представляет нам среда программирования для получения информации
- 7. С самым первым блоком Оранжевой палитры мы уже с вами знакомы: он называется "Начало". Именно с
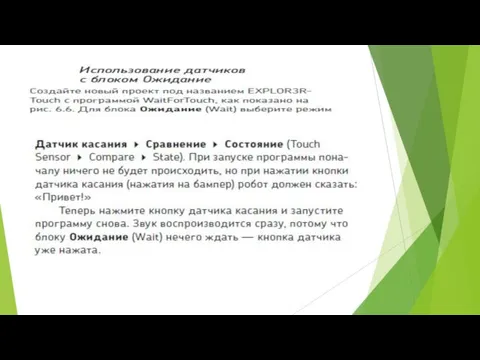
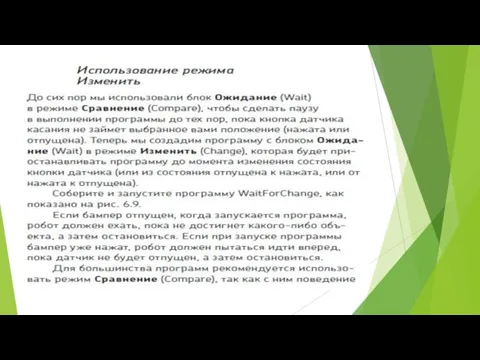
- 8. 4.3. Оранжевая палитра, программный блок "Ожидание" Перед тем, как приступить к решению практических задач, давайте закрепим
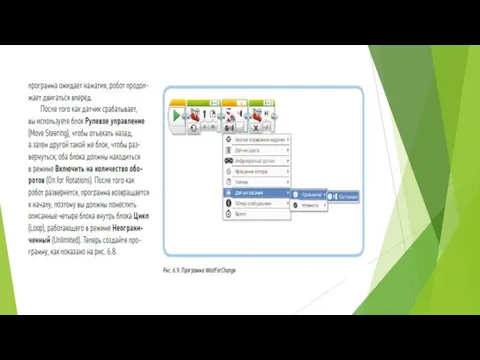
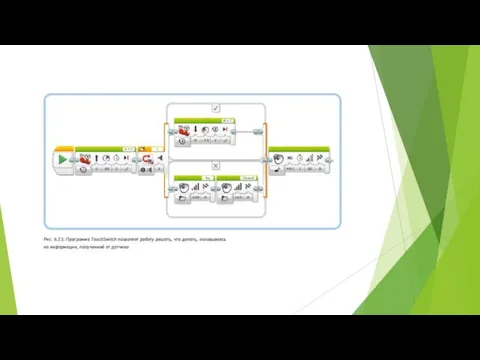
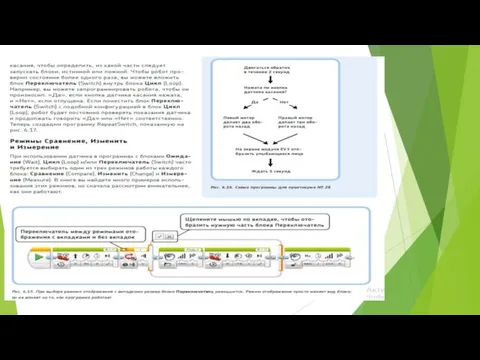
- 28. Задача №6: необходимо написать программу, запускающую движение робота по щелчку кнопки. Решение: Само условие задачи подсказывает
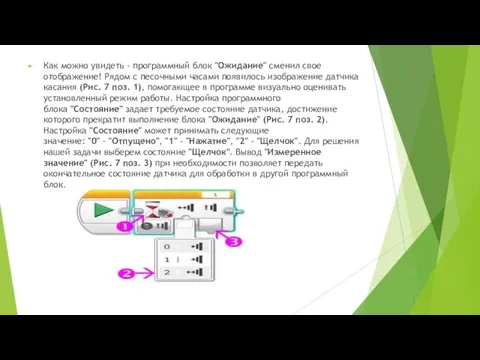
- 29. Как можно увидеть - программный блок "Ожидание" сменил свое отображение! Рядом с песочными часами появилось изображение
- 30. Итак: при такой настройке блока ожидания выполнение нашей программы будет остановлено до нажатия-отпускания кнопки датчика касания.
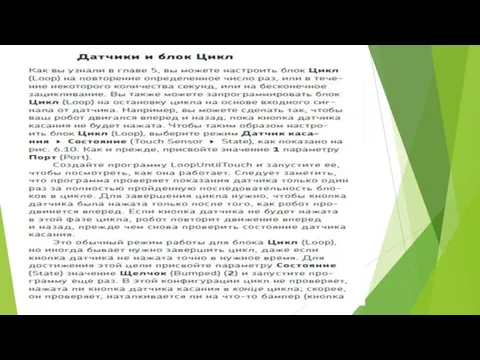
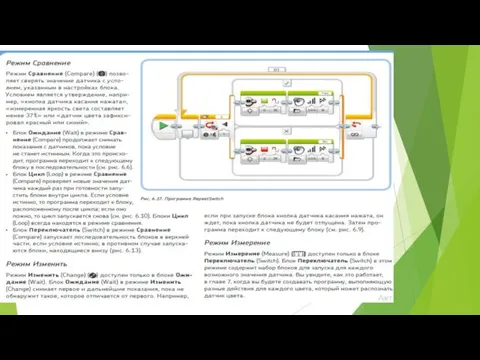
- 31. Задача №7: необходимо написать программу, останавливающую робота, столкнувшегося с препятствием. Из датчика касания давайте соберем небольшой
- 32. Получившийся элемент закрепим на передней балке нашего робота и соединим датчик касания с портом "1" модуля
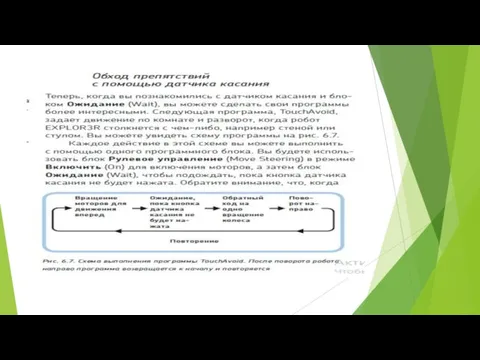
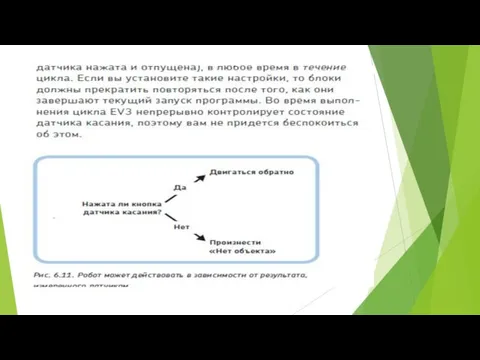
- 33. Конструкция готова! Приступим к созданию программы. По условию задачи: робот должен двигаться вперед, пока не наткнется
- 35. Скачать презентацию

В состав конструктора Lego mindstorms EV3 входят различные датчики. Главная задача
В состав конструктора Lego mindstorms EV3 входят различные датчики. Главная задача


4.1. Изучаем первый датчик – датчик касания
Для подключения датчиков к модулю
4.1. Изучаем первый датчик – датчик касания
Для подключения датчиков к модулю
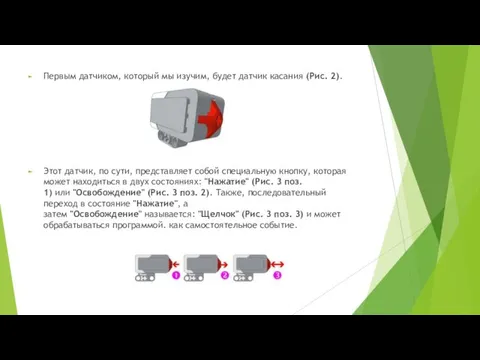
Первым датчиком, который мы изучим, будет датчик касания (Рис. 2).
Этот датчик,
Первым датчиком, который мы изучим, будет датчик касания (Рис. 2).
Этот датчик,
4.2. Оранжевая палитра – Управление операторами
Какие же инструменты представляет нам среда
4.2. Оранжевая палитра – Управление операторами
Какие же инструменты представляет нам среда

С самым первым блоком Оранжевой палитры мы уже с вами знакомы:
С самым первым блоком Оранжевой палитры мы уже с вами знакомы:

4.3. Оранжевая палитра, программный блок "Ожидание"
Перед тем, как приступить к решению
4.3. Оранжевая палитра, программный блок "Ожидание"
Перед тем, как приступить к решению





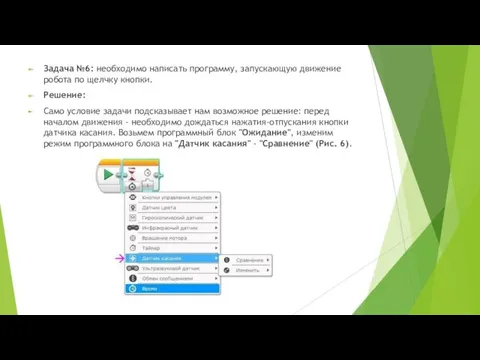
Задача №6: необходимо написать программу, запускающую движение робота по щелчку кнопки.
Решение:
Само условие
Задача №6: необходимо написать программу, запускающую движение робота по щелчку кнопки.
Решение:
Само условие
Как можно увидеть - программный блок "Ожидание" сменил свое отображение! Рядом с песочными
Как можно увидеть - программный блок "Ожидание" сменил свое отображение! Рядом с песочными

Итак: при такой настройке блока ожидания выполнение нашей программы будет остановлено
Итак: при такой настройке блока ожидания выполнение нашей программы будет остановлено
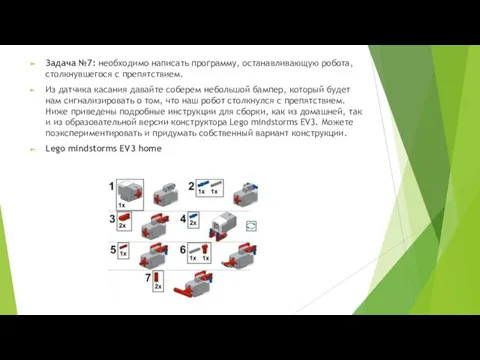
Задача №7: необходимо написать программу, останавливающую робота, столкнувшегося с препятствием.
Из датчика касания
Задача №7: необходимо написать программу, останавливающую робота, столкнувшегося с препятствием.
Из датчика касания
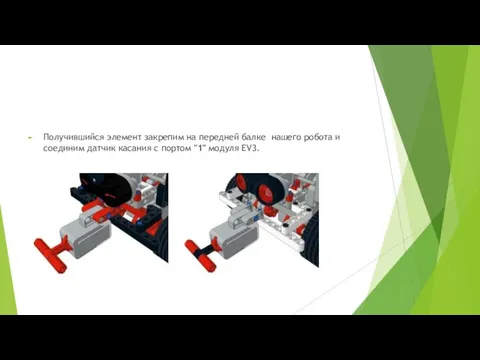
Получившийся элемент закрепим на передней балке нашего робота и соединим датчик
Получившийся элемент закрепим на передней балке нашего робота и соединим датчик
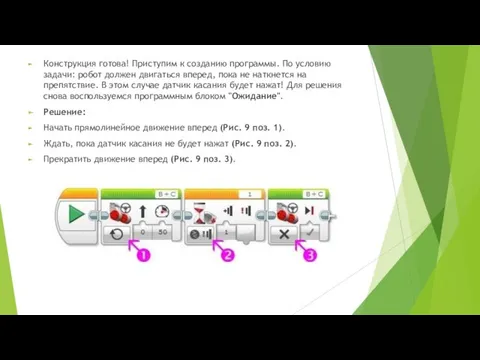
Конструкция готова! Приступим к созданию программы. По условию задачи: робот должен
Конструкция готова! Приступим к созданию программы. По условию задачи: робот должен
 Гиперактивный ребёнок
Гиперактивный ребёнок Проект для 1-4 класса Хлеб всему голова
Проект для 1-4 класса Хлеб всему голова Well logging
Well logging Дикие животные нашего края
Дикие животные нашего края проект о войне
проект о войне Актуальность проблемы речевого развития детей дошкольного возраста. Речь воспитателя как образец подражания
Актуальность проблемы речевого развития детей дошкольного возраста. Речь воспитателя как образец подражания Путь Раскольникова к преступлению
Путь Раскольникова к преступлению Стадии развития групп презентация
Стадии развития групп презентация 'Презентация 'Курение - фактор риска'
'Презентация 'Курение - фактор риска' Наружная реклама. Рекламные поверхности
Наружная реклама. Рекламные поверхности Презентация кабинета
Презентация кабинета Республика Крым
Республика Крым Готический стиль
Готический стиль Основная образовательная программа высшего профессионального образования по направлению 080400 - управление персоналом
Основная образовательная программа высшего профессионального образования по направлению 080400 - управление персоналом Международные корпорации как фактор глобализации международных экономических отношений
Международные корпорации как фактор глобализации международных экономических отношений Нефть и её транспортировка
Нефть и её транспортировка Уходы за посевами и сеянцами в посевном отделении питомника. Лекция-10
Уходы за посевами и сеянцами в посевном отделении питомника. Лекция-10 Первые верфи города. Адмиралтейство.
Первые верфи города. Адмиралтейство. Три основных цвета
Три основных цвета Развитие универмагов на розничном рынке. Зарубежная практика
Развитие универмагов на розничном рынке. Зарубежная практика Дифференциация звуков К и Т
Дифференциация звуков К и Т Галина Уланова – великая балерина
Галина Уланова – великая балерина Урок японского языка (занятие 1)
Урок японского языка (занятие 1) Количество вещества
Количество вещества Исследования технологических режимов десульфурации и раскисления стали
Исследования технологических режимов десульфурации и раскисления стали Первая медицинская помощь при кровотечении
Первая медицинская помощь при кровотечении Стратегия голубого океана. Инновация ценностей
Стратегия голубого океана. Инновация ценностей Патология сердечно-сосудистой системы
Патология сердечно-сосудистой системы