- Движение по линии на двух датчиках освещённости

Содержание
- 2. Для настройки робота а режиме 2D отладки, следует из вкладки «Картинки» выбрать поле Follow line
- 3. Lego EV3, датчики света подключены к портам 1 и 2. Модель робота – 2D модель Для
- 4. Для программирования робота, следующего по линии, применяется принцип релейного или пропорционального регулирования, которые мы уже изучили
- 5. Какой тип программы применить на роботе – выбирать Вам на основе эмпирических данных, полученных при тестировании
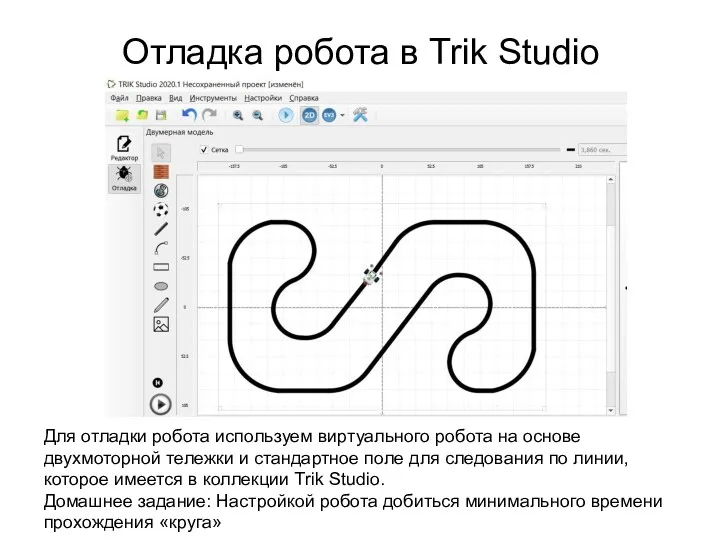
- 6. Отладка робота в Trik Studio Для отладки робота используем виртуального робота на основе двухмоторной тележки и
- 8. Скачать презентацию

Для настройки робота а режиме 2D отладки, следует из вкладки «Картинки»
Для настройки робота а режиме 2D отладки, следует из вкладки «Картинки»
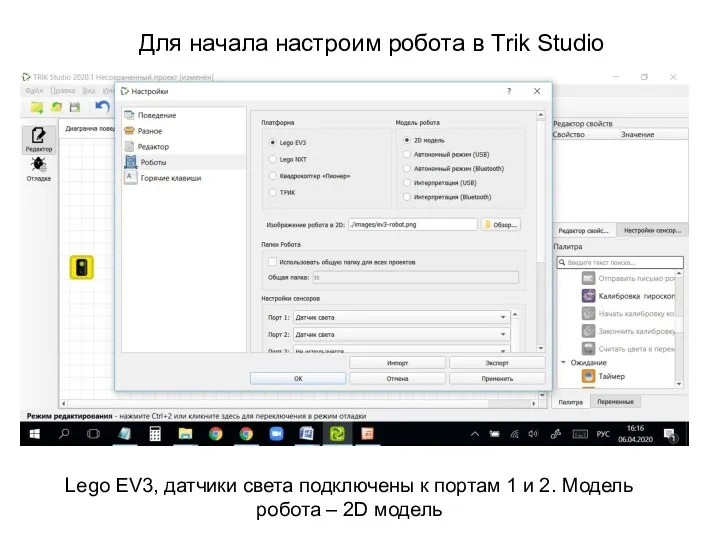
Lego EV3, датчики света подключены к портам 1 и 2. Модель
Lego EV3, датчики света подключены к портам 1 и 2. Модель
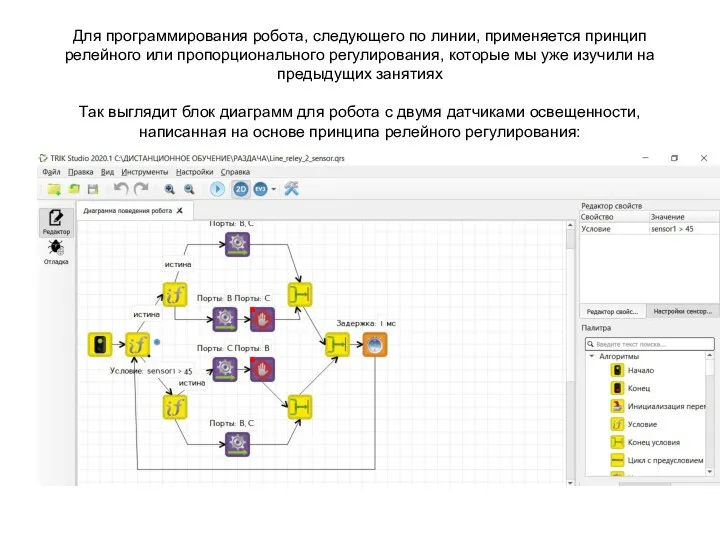
Для программирования робота, следующего по линии, применяется принцип релейного или пропорционального
Для программирования робота, следующего по линии, применяется принцип релейного или пропорционального
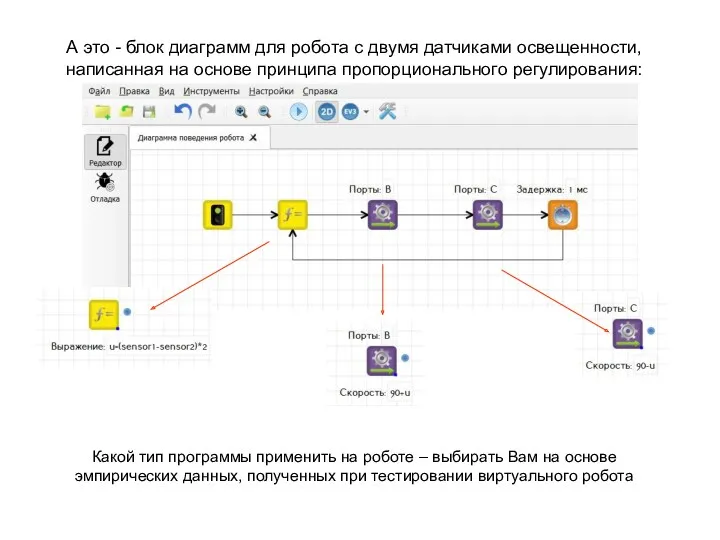
Какой тип программы применить на роботе – выбирать Вам на основе
Какой тип программы применить на роботе – выбирать Вам на основе
Отладка робота в Trik Studio
Для отладки робота используем виртуального робота на
Отладка робота в Trik Studio
Для отладки робота используем виртуального робота на
 Арматура и арматурные изделия
Арматура и арматурные изделия Презентация № 3 Воздух, которым мы дышим
Презентация № 3 Воздух, которым мы дышим Три цвета светофора правила дорожного движения для детей младшего дошкольного возраста
Три цвета светофора правила дорожного движения для детей младшего дошкольного возраста Шлифовка
Шлифовка Картины в технике Шерстяная акварель
Картины в технике Шерстяная акварель Правила поведения и общения с глухими
Правила поведения и общения с глухими Презентация Посвящается милым девочкам нашего класса
Презентация Посвящается милым девочкам нашего класса Исчезающие животные России. Лошадь Пржевальского
Исчезающие животные России. Лошадь Пржевальского delenie_dvuznachnogo_chisla_na_odnoznachnoe._reshenie_zadach
delenie_dvuznachnogo_chisla_na_odnoznachnoe._reshenie_zadach Для инструкции
Для инструкции Презентация Пионерская организация имени В.И. Ленина
Презентация Пионерская организация имени В.И. Ленина Русское национальное блюдо Ватрушки
Русское национальное блюдо Ватрушки Производственно-коммерческая фирма СИБТЕНТ. Паспорт предприятия. Быстровозводимые каркасно-тентовые сооружения
Производственно-коммерческая фирма СИБТЕНТ. Паспорт предприятия. Быстровозводимые каркасно-тентовые сооружения Численное интегрирование
Численное интегрирование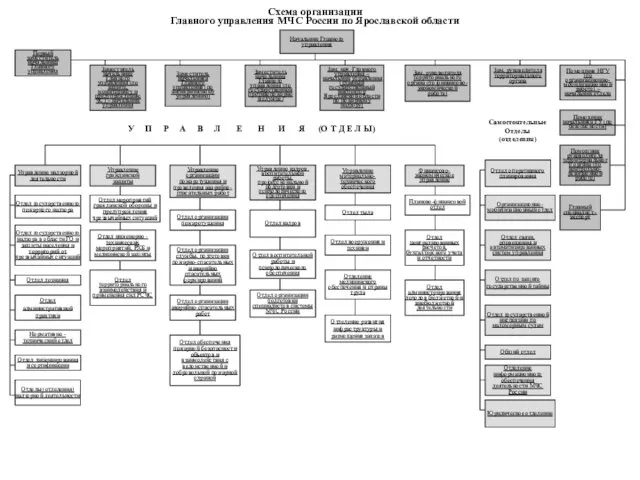 Схема организации Главного управления МЧС России по Ярославской области
Схема организации Главного управления МЧС России по Ярославской области Неценовая конкуренция. Серебро каннского фестиваля за упаковку молока
Неценовая конкуренция. Серебро каннского фестиваля за упаковку молока Педагогическая поддержка детей различного уровня развития и воспитанности
Педагогическая поддержка детей различного уровня развития и воспитанности Активизация мыслительной деятельности воспитанников на уроках физики с использованием ИКТ
Активизация мыслительной деятельности воспитанников на уроках физики с использованием ИКТ Операторы и выражения
Операторы и выражения Ежегодный областной проект по добровольчеству Важное дело. Калужская область
Ежегодный областной проект по добровольчеству Важное дело. Калужская область Мал шаруашылығы өнімдерін техникалық реттеу саласында нормативтік құжаттар
Мал шаруашылығы өнімдерін техникалық реттеу саласында нормативтік құжаттар Хрящевая и костная ткани
Хрящевая и костная ткани Религия. Иудаизм
Религия. Иудаизм Fast Frequency and Response Measurements using FFTs
Fast Frequency and Response Measurements using FFTs Мозжилкина Д.А. ИБМ4 11-А (5)
Мозжилкина Д.А. ИБМ4 11-А (5) Всемирный день социальной справедливости
Всемирный день социальной справедливости Строки в C#
Строки в C# Управление персоналом в коммуникационных компаниях
Управление персоналом в коммуникационных компаниях