- Использование радиолокатора для расхождения

Содержание
- 2. Обработка радиолокационной информации включает определенную последовательность действий: • наблюдение и обнаружение целей; • глазомерную оценку опасности
- 3. Наблюдение и обнаружение целей. Использование РЛС наиболее эффективно, если радиолокационное наблюдение ведется постоянно. В открытом море
- 4. Глазомерная оценка радиолокационной ситуации. Глазомерная оценка является обязательным этапом обработки радиолокационной информации и позволяет при большом
- 5. Радиолокационная прокладка. Относительная прокладка — выполняется на маневренном планшете путем построения векторного треугольника скоростей. С использованием
- 7. Построение треугольника скоростей Пошаговые действия для оценки ситуации: 1. в центр планшета наносится вектор скорости нашего
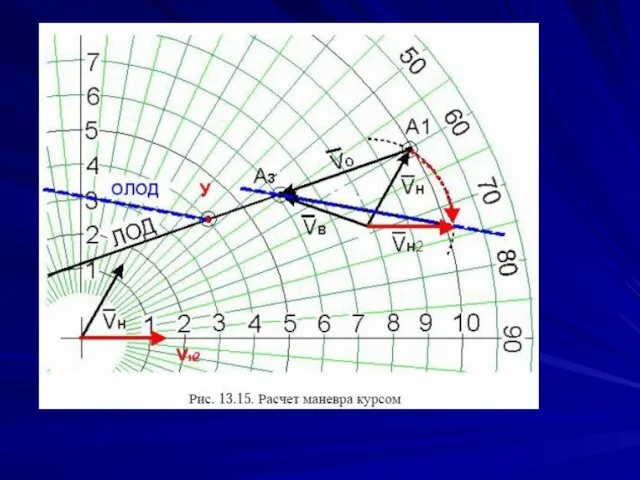
- 8. Маневр расхождения курсом 1. Необходимо на ЛОД нанести упреждающую точку У положения цели в момент начала
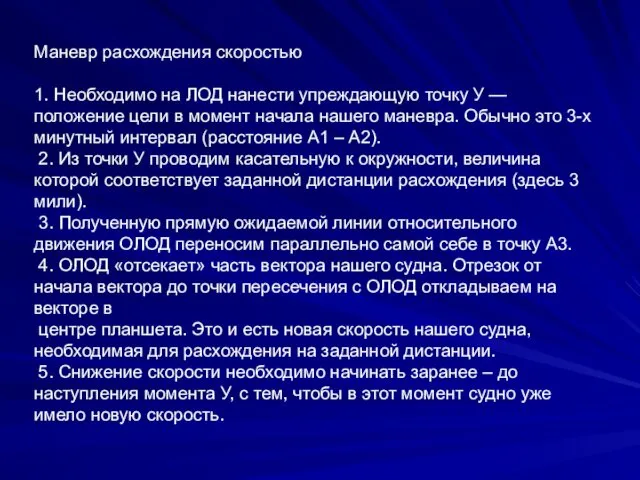
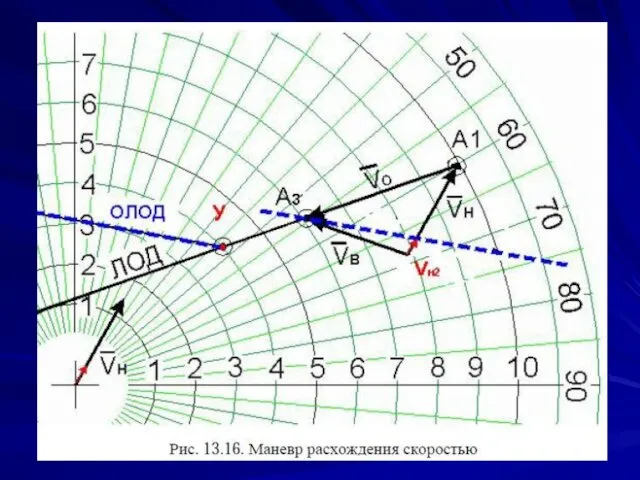
- 10. Маневр расхождения скоростью 1. Необходимо на ЛОД нанести упреждающую точку У — положение цели в момент
- 12. 1. Своевременного определения опасности столкновения с приближающимся судном в соответствии с требованиями правила 7 МППСС-72; 2.
- 14. Скачать презентацию
Обработка радиолокационной информации включает определенную последовательность действий:
• наблюдение и обнаружение целей;
• глазомерную
Обработка радиолокационной информации включает определенную последовательность действий:
• наблюдение и обнаружение целей;
• глазомерную
Наблюдение и обнаружение целей.
Использование РЛС наиболее эффективно, если радиолокационное наблюдение ведется постоянно. В
Наблюдение и обнаружение целей.
Использование РЛС наиболее эффективно, если радиолокационное наблюдение ведется постоянно. В
Глазомерная оценка радиолокационной ситуации.
Глазомерная оценка является обязательным этапом обработки радиолокационной информации и
Глазомерная оценка радиолокационной ситуации.
Глазомерная оценка является обязательным этапом обработки радиолокационной информации и
Радиолокационная прокладка.
Относительная прокладка — выполняется на маневренном планшете путем построения векторного треугольника скоростей.
Относительная прокладка — выполняется на маневренном планшете путем построения векторного треугольника скоростей.
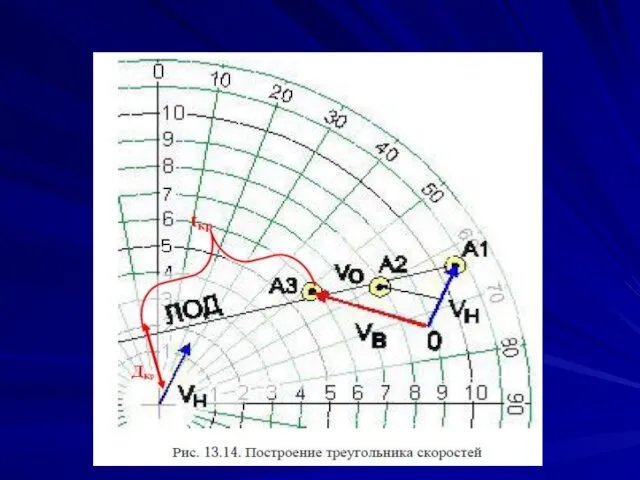
Построение треугольника скоростей
Пошаговые действия для оценки ситуации:
1. в центр планшета наносится вектор скорости
Построение треугольника скоростей
Пошаговые действия для оценки ситуации:
1. в центр планшета наносится вектор скорости
Маневр расхождения курсом
1. Необходимо на ЛОД нанести упреждающую точку У положения цели в
Маневр расхождения курсом
1. Необходимо на ЛОД нанести упреждающую точку У положения цели в
Маневр расхождения скоростью
1. Необходимо на ЛОД нанести упреждающую точку У — положение цели
Маневр расхождения скоростью
1. Необходимо на ЛОД нанести упреждающую точку У — положение цели
1. Своевременного определения опасности столкновения с приближающимся судном в соответствии с требованиями правила
1. Своевременного определения опасности столкновения с приближающимся судном в соответствии с требованиями правила
 Внутренняя политика Александра III (1881 – 1894 гг.). Тема 4 урок 1
Внутренняя политика Александра III (1881 – 1894 гг.). Тема 4 урок 1 Понятие, функции, виды религии
Понятие, функции, виды религии Системно-деятельностный подход в развитии связной речи у детей с тяжелым нарушением речи
Системно-деятельностный подход в развитии связной речи у детей с тяжелым нарушением речи Разработка технологического процесса изготовления корпуса
Разработка технологического процесса изготовления корпуса Франчайзинг Ростик Групп. Сеть ресторанов быстрого обслуживания
Франчайзинг Ростик Групп. Сеть ресторанов быстрого обслуживания Зооветеринарный аудит в скотоводстве
Зооветеринарный аудит в скотоводстве ДВС-синдром
ДВС-синдром ФГОС, презентация для родителей, ШМО
ФГОС, презентация для родителей, ШМО Производная и её применение в экономике
Производная и её применение в экономике Радуга творчества
Радуга творчества Information technologies
Information technologies Международная летняя школа Русского географического общества География для всех
Международная летняя школа Русского географического общества География для всех Электрические и магнитные элементы автоматики
Электрические и магнитные элементы автоматики Род несклоняемых и склоняемых имен существительных
Род несклоняемых и склоняемых имен существительных урок по мордовскому языку
урок по мордовскому языку Приход Святой Блаженной Матроны Московской. Пос. Зверосовхоз
Приход Святой Блаженной Матроны Московской. Пос. Зверосовхоз Термообработка деревянного реквизита
Термообработка деревянного реквизита Ukrainian traditions
Ukrainian traditions Характеристика элемента по положению в Периодической таблице
Характеристика элемента по положению в Периодической таблице Условия реализации основной образовательной программыобщего образования обучающихся с умственной отсталостью
Условия реализации основной образовательной программыобщего образования обучающихся с умственной отсталостью Состояние и основные проблемы горно-металлургического комплекса Свердловской области
Состояние и основные проблемы горно-металлургического комплекса Свердловской области Клуб Двойная навигация. Контроль давления. УЗИ. Нейростимулция
Клуб Двойная навигация. Контроль давления. УЗИ. Нейростимулция Столбняк. Классификация и лечение
Столбняк. Классификация и лечение They are amazing
They are amazing Презентация Интересное в мире искусства.
Презентация Интересное в мире искусства. Древний Египет
Древний Египет Контроллинг: сущность, функции, виды и основные задачи (тема № 1)
Контроллинг: сущность, функции, виды и основные задачи (тема № 1) Ассимиляция. Диссимиляция. Редукция
Ассимиляция. Диссимиляция. Редукция